


Design and Verification of an Integrated Panoramic Sun Sensor atop a Small Spherical Satellite


Abstract
:1. Introduction
- (1)
- IPSS has a panoramic field of view of 4 and can work under any attitude;
- (2)
- When a subset of solar cells is damaged, IPSS can still provide reliable measurement;
- (3)
- IPSS has a negligible power consumption;
- (4)
- The spherical structure is maintained to the most compared with COTS products.
2. Mechatronic Design and Modeling of IPSS
2.1. Overview of the Small Spherical Satellite Q-SAT
2.2. The Integrated Panoramic Sun Sensor
- 1
- Photoelectric Model of the Solar Cell
- 2.
- The Kelly Cosine Characteristic of the Solar Cell
- 3.
- Temperature Correction
2.3. The Sun Vector Inversion Principle
3. Accuracy and Redundancy Analyses of IPSS
3.1. Accuracy Analyses
- 1.
- Sampling Error
- 2.
- Manufacturing and Installation Error
- 3.
- Parameter Calibration Error
- 4.
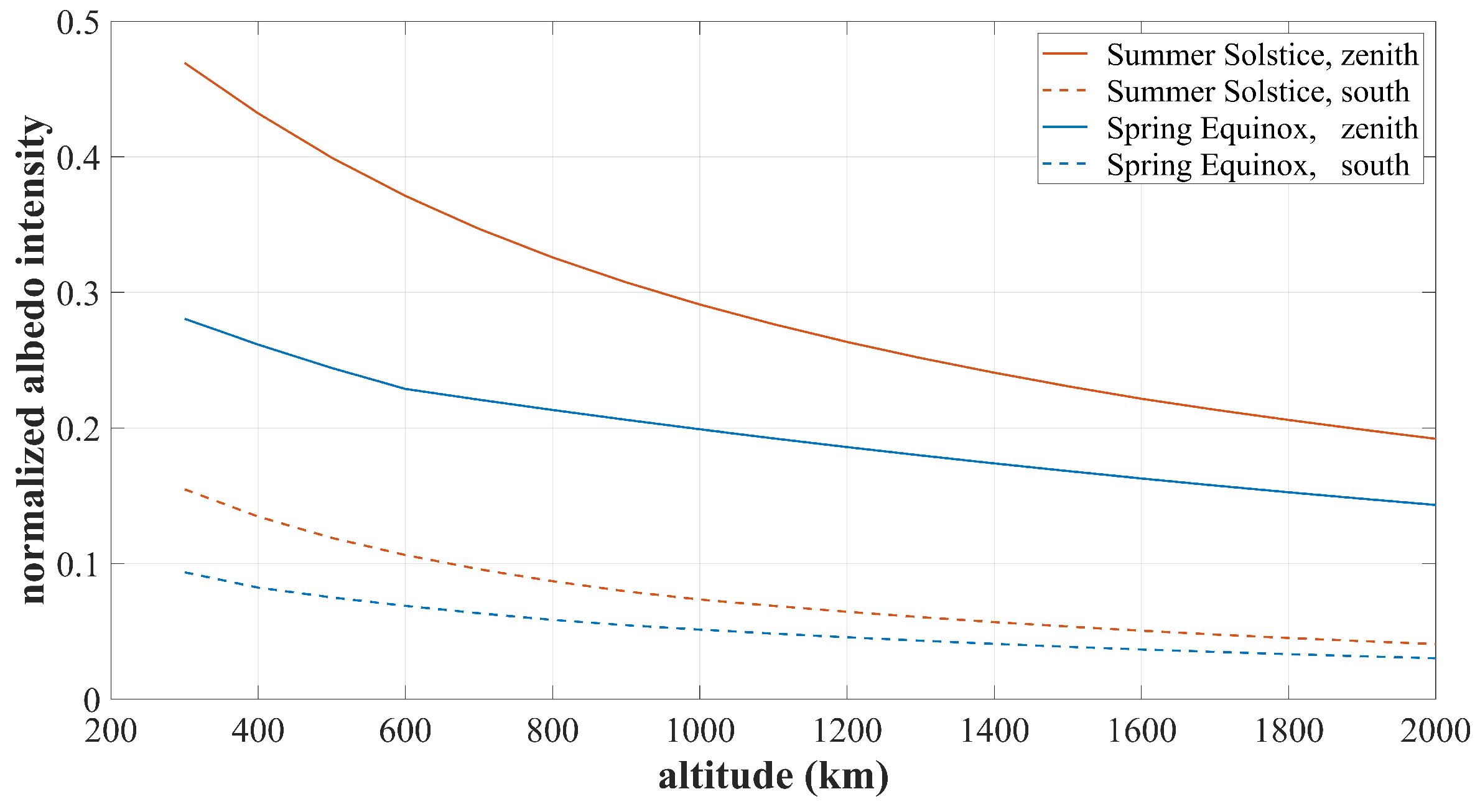
- Seasonal Variations in Sunlight Intensity and Earth Albedo Effect
3.2. Redundancy Analyses
4. Experimental Results and On-Orbit Performance
4.1. Ground Experiments with Artificial Sunlight
4.2. Simulation in Various Orbits and Seasons
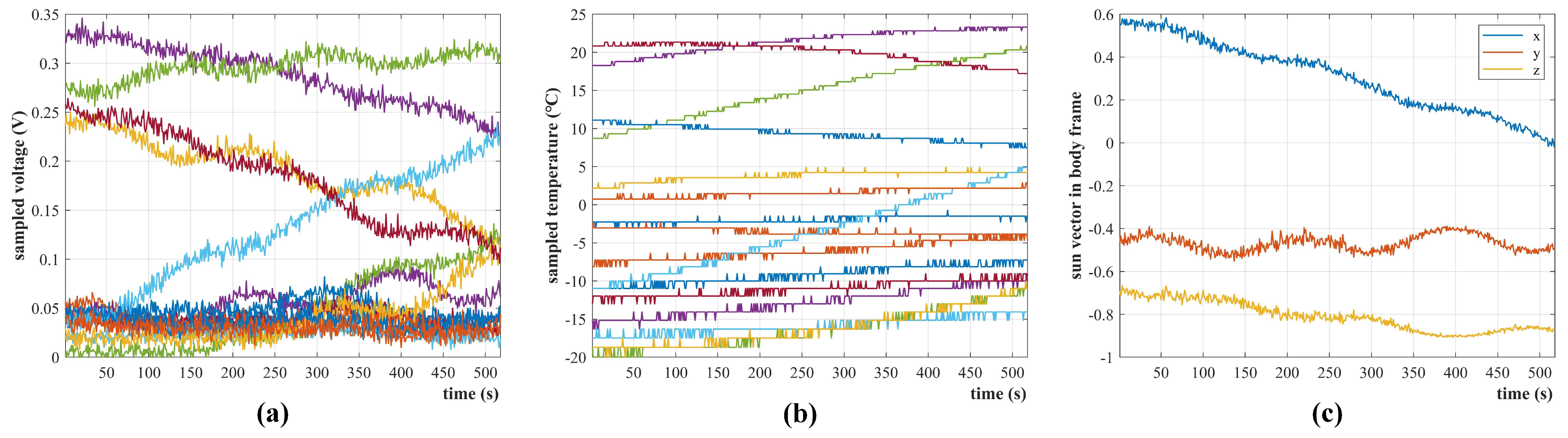
4.3. On-Orbit Verification of IPSS
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| IPSS | Integrated Panoramic Sun Sensor |
| GNSS | Global Navigation Satellite System |
| ADC | Attitude Determination and Control |
| FOV | Field of View |
| CCD | Charge Coupied Device |
| A/D | Analog to Digital |
| CNC | Computerised Numerical Control Machine |
| COTS | commercial-off-the-shelf |
| IGRF | International Geomagnetic Reference Frame |
| TOMS-EP | Total Ozone Mapping Spectrometer Earth Probe |
References
- Zhao, Z.; Wang, Z.; Zhang, Y. A spherical micro satellite design and detection method for upper atmospheric density estimation. Int. J. Aerosp. Eng. 2019, 2019, 1758956. [Google Scholar] [CrossRef]
- Wang, Z.; Han, D.; Li, B.; He, Y.; Zhang, Q.; Weng, G.; Zhang, Y. Q-SAT for atmosphere and gravity field detection: Design, mission and preliminary results. Acta Astronaut. 2022, 198, 521–530. [Google Scholar] [CrossRef]
- Shao, K.; Wei, C.; Gu, D.; Wang, Z.; Wang, K.; Cai, Y.; Peng, D. Tsinghua scientific satellite precise orbit determination using onboard GNSS observations with antenna center Modeling. Remote Sens. 2022, 14, 2479. [Google Scholar] [CrossRef]
- He, Y.; Wang, Z.; Zhang, Y. The design, test and application on the satellite separation system of space power supply based on graphene supercapacitors. Acta Astronaut. 2021, 186, 259–268. [Google Scholar] [CrossRef]
- He, Y.; Wang, Z.; Zhang, Y. The electromagnetic separation system for the small spherical satellite Q-SAT. Acta Astronaut. 2021, 184, 180–192. [Google Scholar] [CrossRef]
- Diriker, F.K.; Frias, A.; Keum, K.H.; Lee, R.S.K. Improved accuracy of a single-slit digital sun sensor design for cubesat application using sub-pixel interpolation. Sensors 2021, 21, 1472. [Google Scholar] [CrossRef] [PubMed]
- Rahdan, A.; Hossein, B.; Mostafa, A. Design of on-board calibration methods for a digital sun sensor based on Levenberg–Marquardt algorithm and Kalman filters. Chin. J. Aeronaut. 2020, 33, 339–351. [Google Scholar] [CrossRef]
- Kapás, K.; Tamás, B.; Gergely, D.; János, T.; László, M.; András, P. Attitude determination for nano-satellites–I. Spherical projections for large field of view infrasensors. Exp. Astron. 2021, 51, 515–527. [Google Scholar] [CrossRef]
- Lizbeth, S. A review on sun position sensors used in solar applications. Renew. Sustain. Energy Rev. 2018, 82, 2128–2146. [Google Scholar] [CrossRef]
- Kokhanovsky, A.; Box, J.; Vandecrux, B.; Mankoff, K.; Lamare, M.; Smirnov, A.; Kern, M. The determination of snow albedo from satellite measurements using fast atmospheric correction technique. Remote Sens. 2020, 12, 234. [Google Scholar] [CrossRef]
- JPL Planetary and Lunar Ephemerides. Available online: https://ssd.jpl.nasa.gov/planets/eph_export.html (accessed on 1 October 2022).
- Thébault, E.; Finlay, C.; Beggan, C.; Alken, P.; Aubert, J.; Barrois, O.; Bertrand, F.; Bondar, T.; Boness, A.; Brocco, L.; et al. International geomagnetic reference field: The 12th generation. Earth Planets Space 2015, 67, 79. [Google Scholar] [CrossRef] [Green Version]
- Ancuta, F.; Costin, C. Computer modeling studies for studying defects in PV cells. In Proceedings of the 2012 International Conference and Exposition on Electrical and Power Engineering, Iasi, Romania, 25–27 October 2012. [Google Scholar] [CrossRef]
- Mustafa, F.; Shakir, S.; Mustafa, F.; Naiyf, A. Simple design and implementation of solar tracking system two axis with four sensors for Baghdad city. In Proceedings of the 9th International Renewable Energy Congress, Hammamet, Tunisia, 20–22 March 2018. [Google Scholar] [CrossRef]
- Singh, P.; Ravindra, N. Temperature dependence of solar cell performance—An analysis. Sol. Energy Mater. Sol. Cells 2012, 101, 36–45. [Google Scholar] [CrossRef]
- Patel, M.; Omid, B. Wind and Solar Power Systems: Design, Analysis, and Operation, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2021; pp. 174–175. [Google Scholar] [CrossRef]
- Gueymard, C.A. A reevaluation of the solar constant based on a 42-year total solar irradiance time series and a reconciliation of spaceborne observations. Solar Energy 2018, 168, 2–9. [Google Scholar] [CrossRef]
- Eleftheratos, K.; Kouklaki, D.; Zerefos, C. Sixteen years of measurements of ozone over Athens, Greece with a Brewer spectrophotometer. Oxygen 2021, 1, 5. [Google Scholar] [CrossRef]
- Finance, A.; Dufour, C.; Boutéraon, T.; Sarkissian, A.; Mangin, A.; Keckhut, P.; Meftah, M. In-orbit attitude determination of the UVSQ-SAT cubeSat using TRIAD and MEKF methods. Sensors 2021, 21, 7361. [Google Scholar] [CrossRef] [PubMed]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| COSPAR ID | 2020-054B |
|---|---|
| diameter | 510 mm |
| weight | 23 kg |
| payload | dual frequency GNSS receiver |
| separation system | electromagnetic separation system |
| perigee | 488.0 km |
| apogee | 513.9 km |
| inclination angle | 97.5 |
| orbit period | 84.5 min |
| semi-major axis | 6871 km |
| Category | Factor | Parameter | Magnitude | Introduced Error |
|---|---|---|---|---|
| sampling error | current/voltage sampling error of solar cells | 2.5 mA/5 mV | 1.04 | |
| temperature sampling error | T | <3 C | <0.64 | |
| manufacturing and installation | installation matrix error of solar cells | 0.5 | 0.16 | |
| parameter error | resistance error of current sampling resistor | 0.5% | 0.14 | |
| temperature compensation coefficient error | K | 10% | <0.50 | |
| error in max. generated current at | 2 mA | 0.48 | ||
| albedo and seasonal variations | Earth albedo effect | E | up to 40% | depends |
| seasonal variations in sunlight intensity | E | 3.4% | negligible |
| Parameter | Value |
|---|---|
| satellite weight | 23 kg |
| satellite inertial matrix | = 0.6349 kg · m |
| = 0.7960 kg · m | |
| = 0.6238 kg · m | |
| = 0.0023 kg · m | |
| = 0.0019 kg · m | |
| = −0.0086 kg · m | |
| inertial matrix error of attitude filter | 10% |
| magnetometer measurement error | 250 nT |
| magnetic momentum of magnetorquer | 3.4 A · m |
| inertial of the bias momentum wheel | 1.067 × 10 kg · m |
| rotational speed of bias momentum wheel | 2000.0 rpm |
| control frequency | 1 Hz |
| Season/Time of the Year | Local Time of Descending | Average Accuracy of IPSS | Attitude Determination Accuracy | |
|---|---|---|---|---|
| Angle | Angular Rate | |||
| Spring Equinox | 18:00 | 1.62 | 0.32 | 0.0014/s |
| 12:00 | 3.12 | 0.43 | 0.0007/s | |
| Summer Solstice | 18:00 | 2.30 | 0.38 | 0.0013/s |
| 12:00 | 3.24 | 0.61 | 0.0013/s | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Q.; Zhang, Y. Design and Verification of an Integrated Panoramic Sun Sensor atop a Small Spherical Satellite. Sensors 2022, 22, 8130. https://doi.org/10.3390/s22218130
Zhang Q, Zhang Y. Design and Verification of an Integrated Panoramic Sun Sensor atop a Small Spherical Satellite. Sensors. 2022; 22(21):8130. https://doi.org/10.3390/s22218130
Chicago/Turabian StyleZhang, Qi, and Yulin Zhang. 2022. "Design and Verification of an Integrated Panoramic Sun Sensor atop a Small Spherical Satellite" Sensors 22, no. 21: 8130. https://doi.org/10.3390/s22218130
APA StyleZhang, Q., & Zhang, Y. (2022). Design and Verification of an Integrated Panoramic Sun Sensor atop a Small Spherical Satellite. Sensors, 22(21), 8130. https://doi.org/10.3390/s22218130