

Method for Recognizing Pressing Position and Shear Force Using Active Acoustic Sensing on Gel Plates


Abstract
:1. Introduction
2. Related Work
2.1. Touch-Sensing Technology
2.2. Active Acoustic Sensing
3. Proposed Method
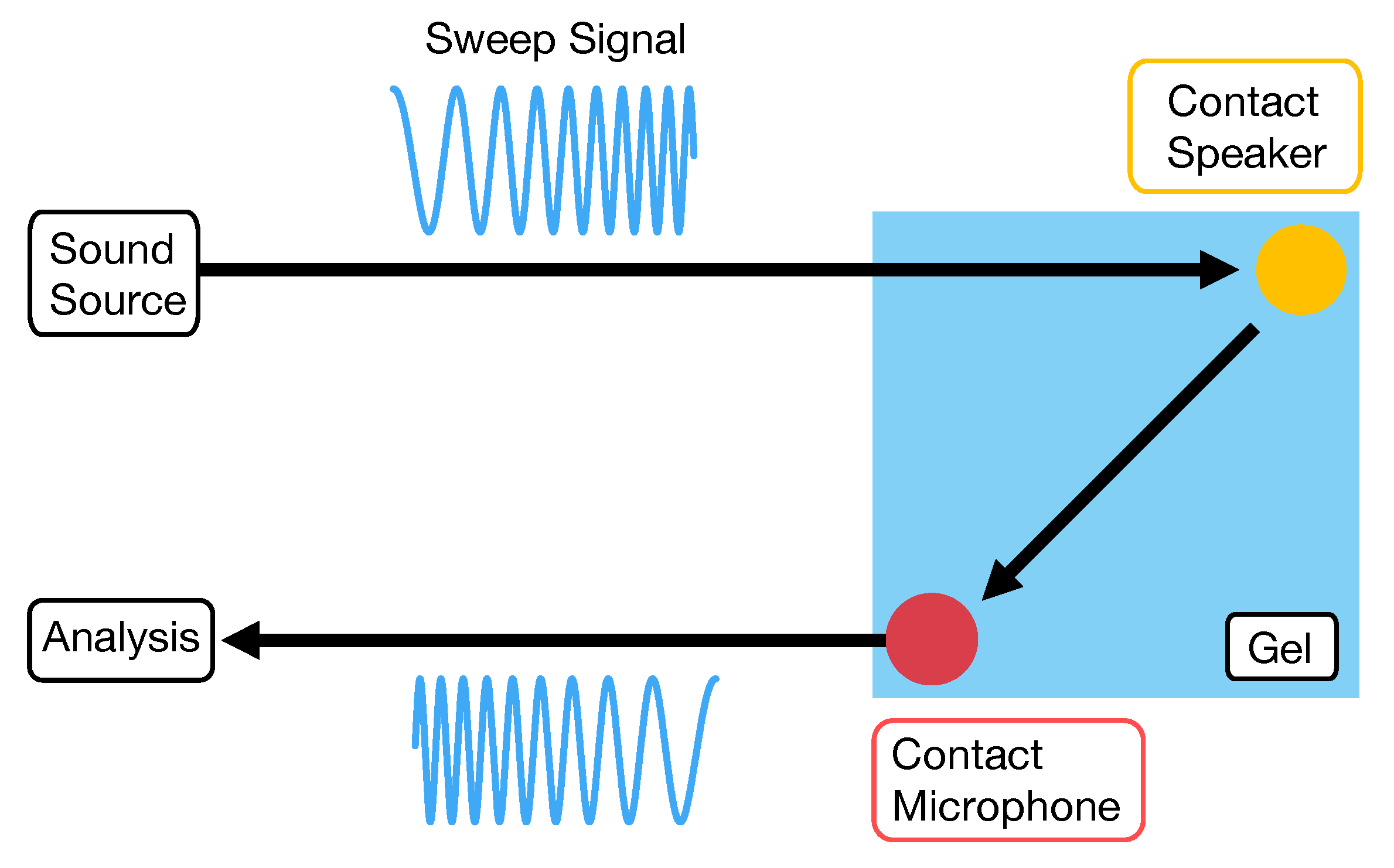
3.1. Sweep Signal
3.2. Recognition Method
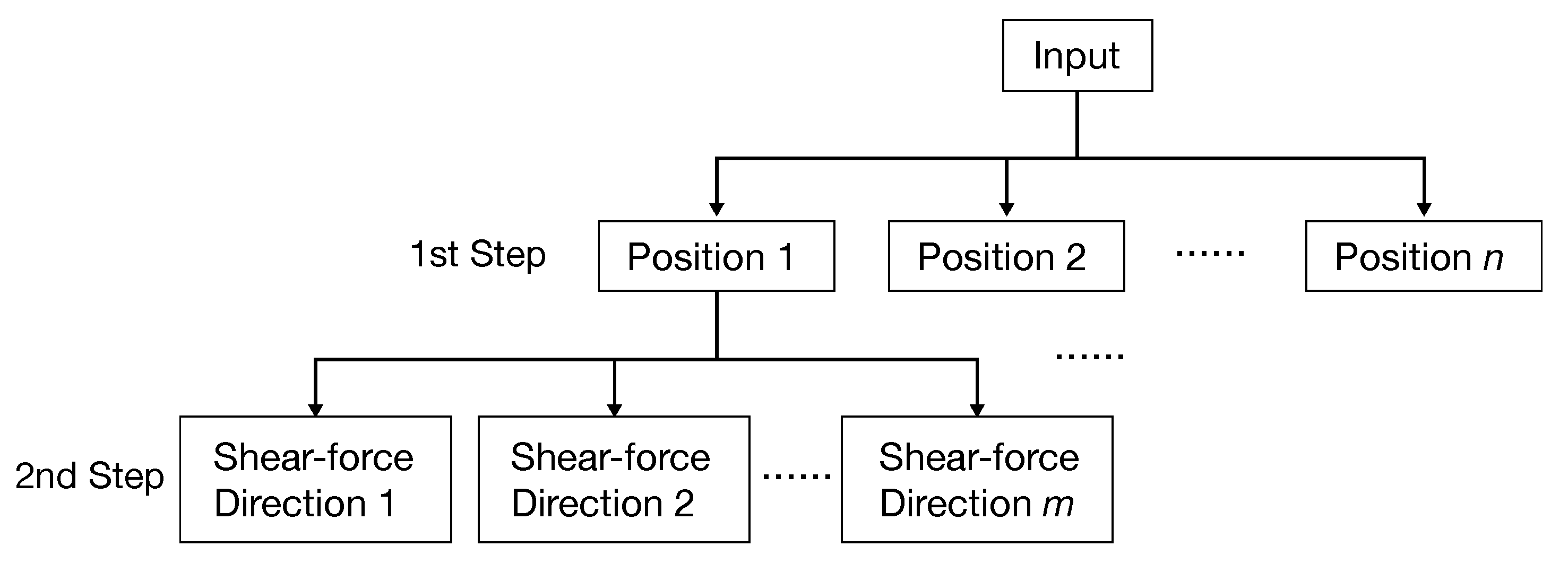
3.3. Two-Step Recognition
4. Implementation
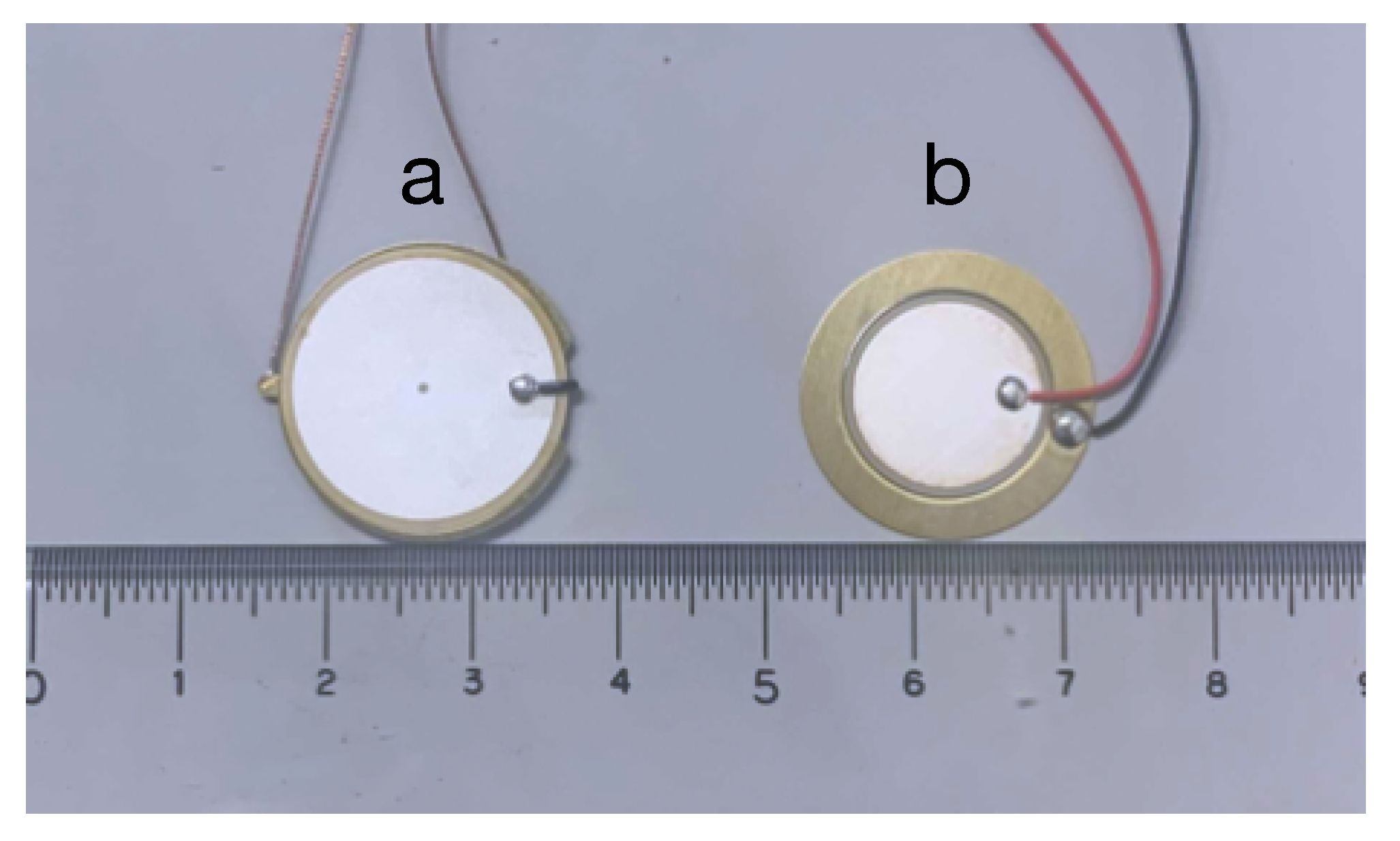
4.1. Hardware
4.2. Software
5. Evaluation
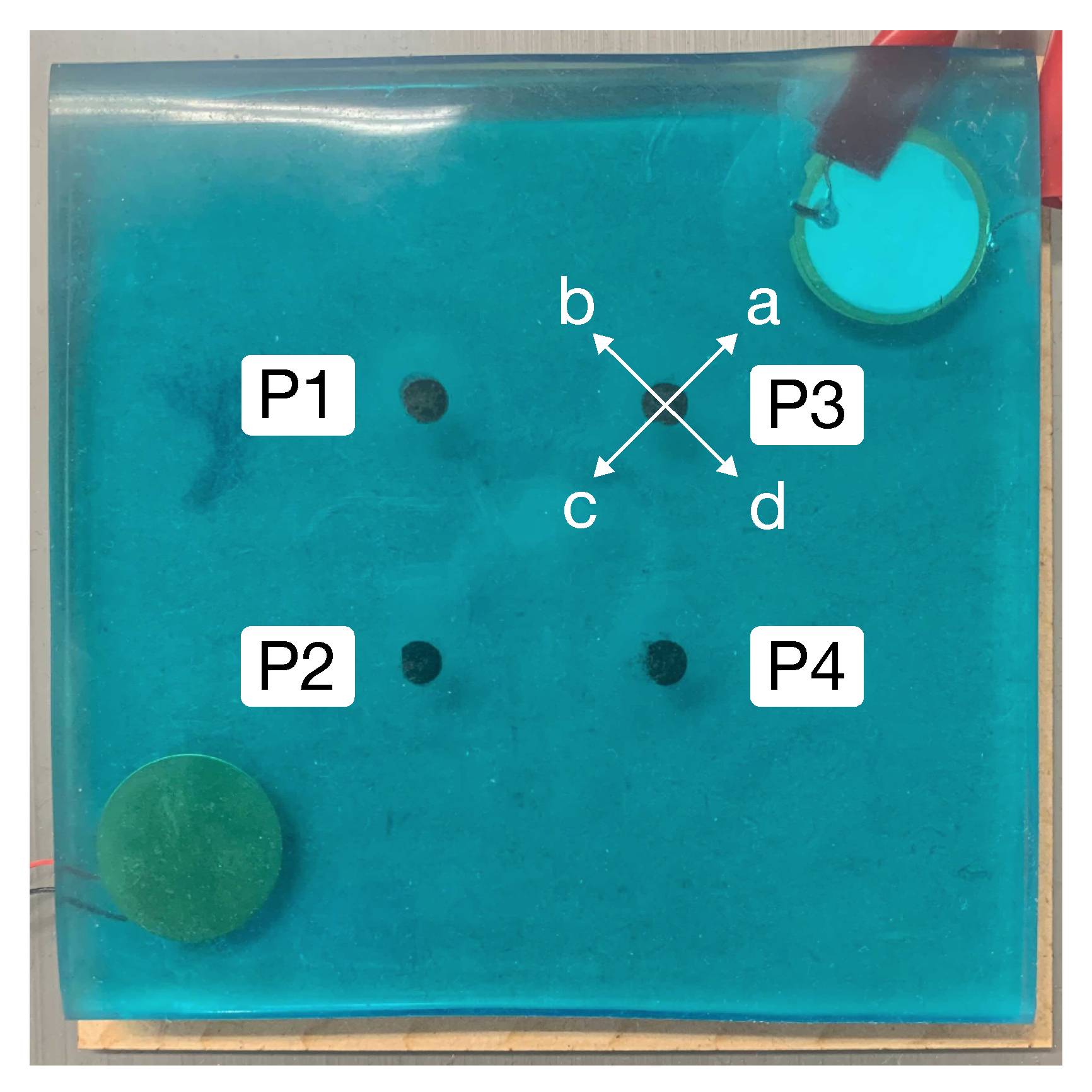
5.1. Experimental Setup
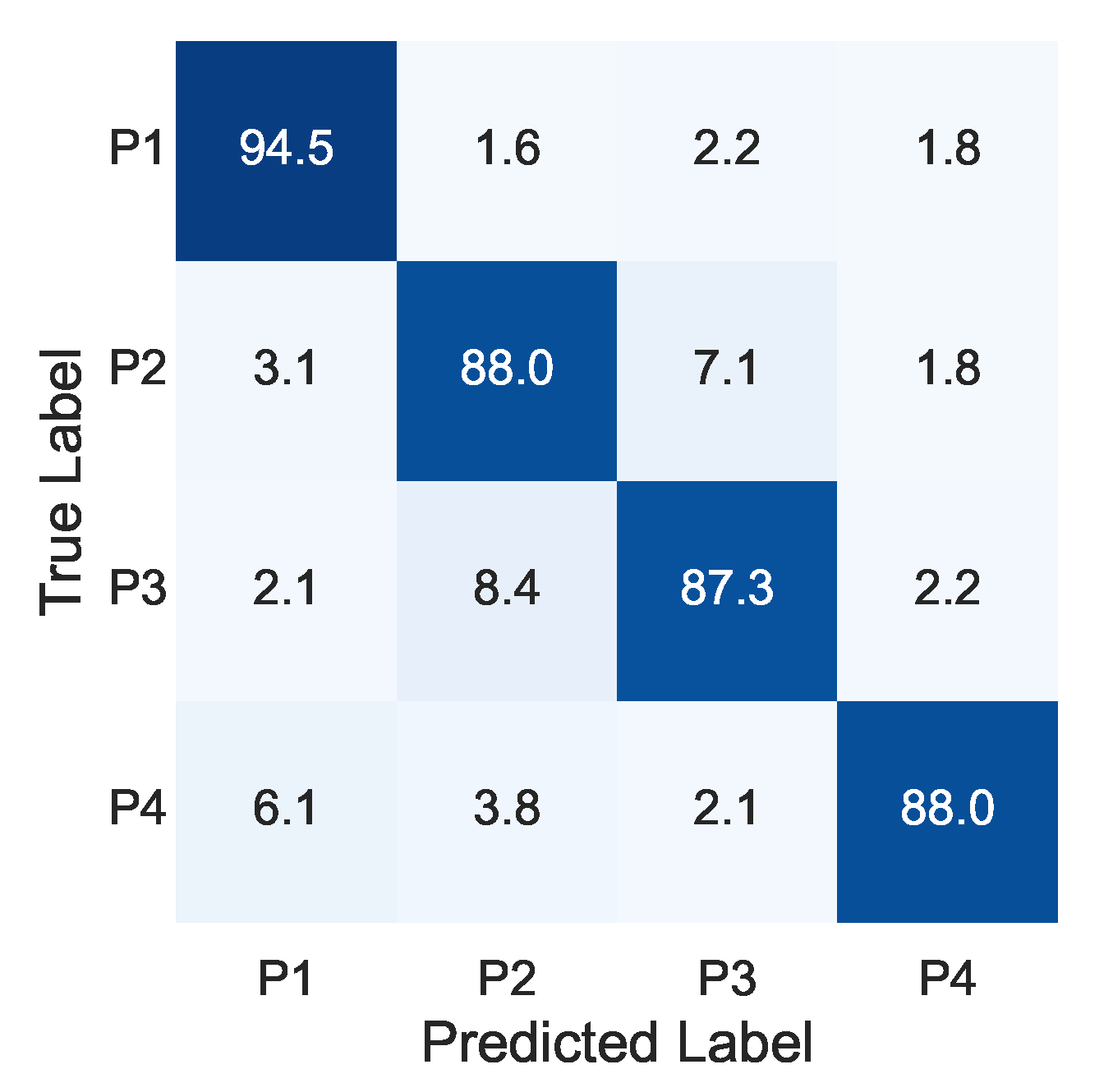
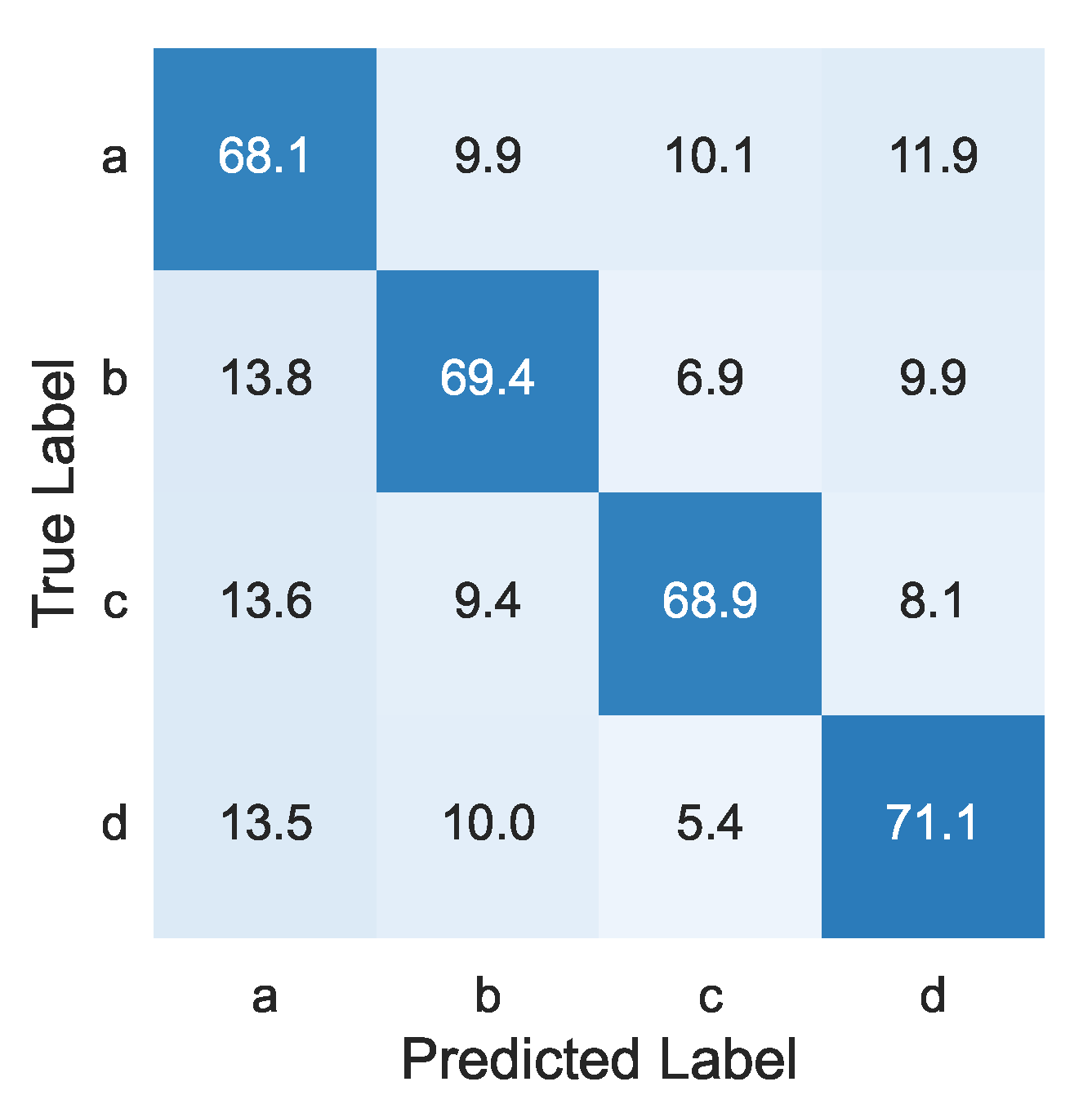
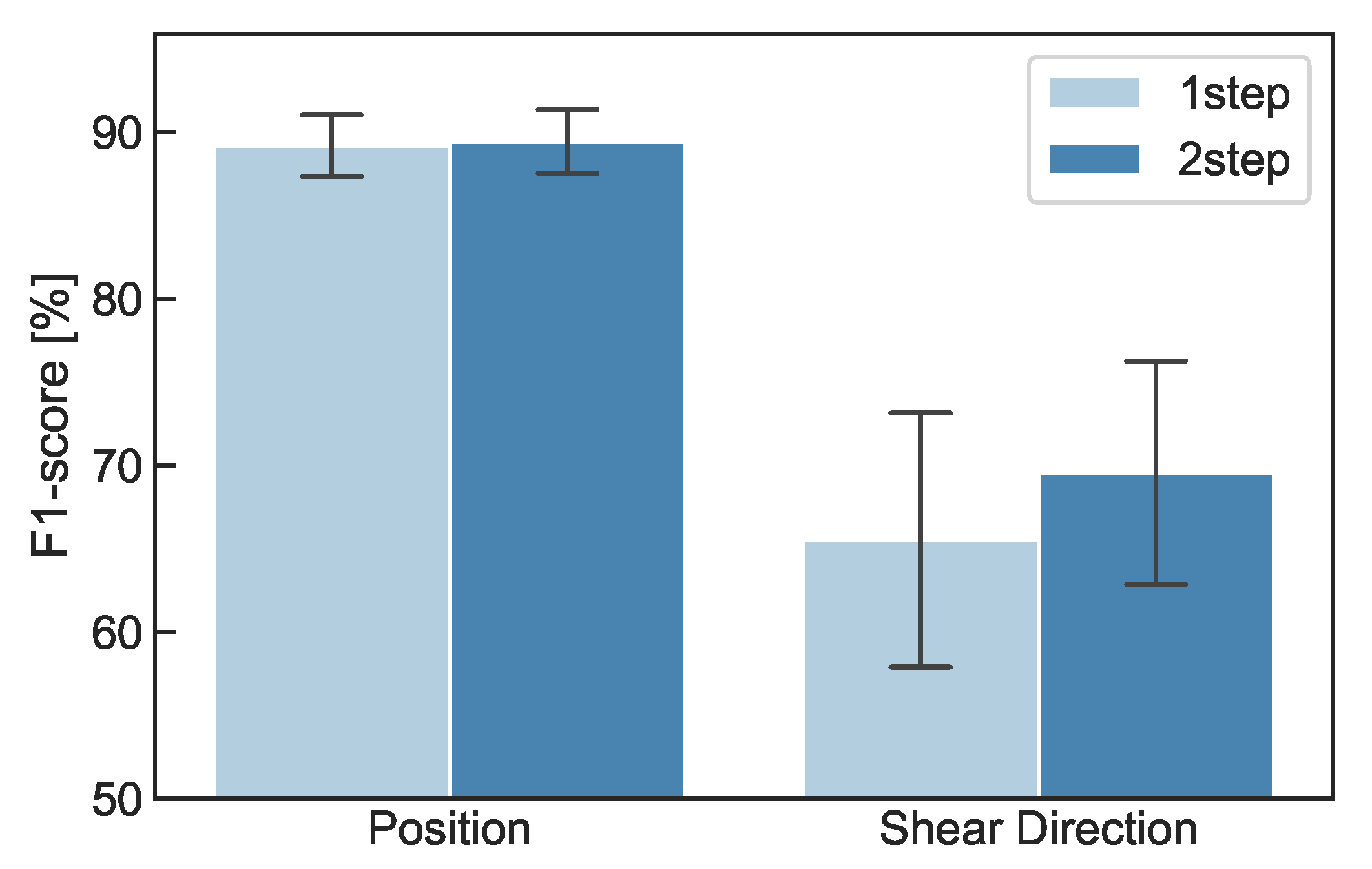
5.2. Results
6. Discussion
6.1. Recognition Performance
6.2. Assumed Applications
6.3. Gel Properties
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mitani, Y.; Nakatani, K. Feature and Technology Trends of Various Touch Panels. Nippon. Gomu Kyokaishi 2011, 84, 256–261. [Google Scholar] [CrossRef] [Green Version]
- Apple. Technical Specifications. 2022. Available online: https://support.apple.com/kb/SP726?viewlocale=en_US&locale=ja_JP (accessed on 15 December 2022).
- Watanabe, K.; Yamamura, R.; Kakehi, Y. Foamin: A Deformable Sensor for Multimodal Inputs Based on Conductive Foam with a Single Wire. In Proceedings of the CHI EA ’21: Extended Abstracts of the 2021 CHI Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; Association for Computing Machinery: New York, NY, USA, 2021. Number Article 189. pp. 1–4. [Google Scholar]
- Nakai, Y.; Kudo, S.; Okazaki, R.; Kajimoto, H.; Kuribayashi, H. Detection of tangential force for a touch panel using shear deformation of the gel. In Proceedings of the CHI EA ’14: CHI ’14 Extended Abstracts on Human Factors in Computing Systems, Toronto, ON, Canada, 26 April–1 May 2014; Association for Computing Machinery: New York, NY, USA, 2014; pp. 2353–2358. [Google Scholar]
- Moscovich, T. Multi-touch interaction. In Proceedings of the CHI EA ’06: CHI ’06 Extended Abstracts on Human Factors in Computing Systems, Montréal, QC, Canada, 22–27 April 2006; Association for Computing Machinery: New York, NY, USA, 2006; pp. 1775–1778. [Google Scholar]
- Ingram, A.; Wang, X.; Ribarsky, W. Towards the establishment of a framework for intuitive multi-touch interaction design. In Proceedings of the AVI ’12: International Working Conference on Advanced Visual Interfaces, Capri Island, Italy, 21–25 May 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 66–73. [Google Scholar]
- Rekimoto, J.; Schwesig, C. PreSenseII: Bi-directional touch and pressure sensing interactions with tactile feedback. In Proceedings of the CHI EA ’06: CHI ’06 Extended Abstracts on Human Factors in Computing Systems, Montréal, QC, Canada, 22–27 April 2006; Association for Computing Machinery: New York, NY, USA, 2006; pp. 1253–1258. [Google Scholar]
- Rosenberg, I.; Perlin, K. The UnMousePad: An interpolating multi-touch force-sensing input pad. In Proceedings of the SIGGRAPH ’09: ACM SIGGRAPH 2009 Papers, New Orleans, LA, USA, 3–7 August 2009; Association for Computing Machinery: New York, NY, USA, 2009. Number Article 65. pp. 1–9. [Google Scholar]
- Quinn, P. Estimating Touch Force with Barometric Pressure Sensors. In Proceedings of the CHI ’19: 2019 CHI Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; Association for Computing Machinery: New York, NY, USA, 2019. Number Paper 689. pp. 1–7. [Google Scholar]
- Vogt, D.M.; Park, Y.L.; Wood, R.J. Design and Characterization of a Soft Multi-Axis Force Sensor Using Embedded Microfluidic Channels. IEEE Sens. J. 2013, 13, 4056–4064. [Google Scholar] [CrossRef] [Green Version]
- Sakamoto, Y.; Yoshikawa, T.; Oe, T.; Shizuki, B.; Fukumoto, M.; Tanaka, J. Wrinklesurface: A wrinklable soft-surfaced multi-touch interface. In Proceedings of the 19th Workshop on Interactive Systems and Software, WISS, Miyazu, Japan, 1–3 December 2011; pp. 7–12. [Google Scholar]
- Huang, M.; Fujita, K.; Takashima, K.; Tsuchida, T.; Manabe, H.; Kitamura, Y. ShearSheet: Low-Cost Shear Force Input with Elastic Feedback for Augmenting Touch Interaction. In Proceedings of the ISS ’19: 2019 ACM International Conference on Interactive Surfaces and Spaces, Daejeon, Republic of Korea, 10–13 November 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 77–87. [Google Scholar]
- Wei, R.; He, J.; Ge, S.; Liu, H.; Ma, X.; Tao, J.; Cui, X.; Mo, X.; Li, Z.; Wang, C.; et al. Self-powered all-optical tactile sensing platform for user-interactive interface. Adv. Mater. Technol. 2022, 2200757. [Google Scholar] [CrossRef]
- Zhang, W.; Xi, Y.; Wang, E.; Qu, X.; Yang, Y.; Fan, Y.; Shi, B.; Li, Z. Self-Powered Force Sensors for Multidimensional Tactile Sensing. ACS Appl. Mater. Interfaces 2022, 14, 20122–20131. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Shao, Q.; Tang, C.; Qiao, F.; Lu, T.; Li, X.; Liu, X.J.; Zhao, H. Conformable and compact multiaxis tactile sensor for human and robotic grasping via anisotropic waveguides. Adv. Mater. Technol. 2022, 7, 2200595. [Google Scholar] [CrossRef]
- Watanabe, H.; Terada, T.; Tsukamoto, M. Gesture Recognition Method Utilizing Ultrasonic Active Acoustic Sensing. J. Inf. Process. 2017, 25, 331–340. [Google Scholar] [CrossRef] [Green Version]
- Yokota, T.; Hashida, T. Hand Gesture and On-body Touch Recognition by Active Acoustic Sensing throughout the Human Body. In Proceedings of the UIST ’16 Adjunct: 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 113–115. [Google Scholar]
- Xie, Y.; Li, F.; Wu, Y.; Wang, Y. HearFit: Fitness Monitoring on Smart Speakers via Active Acoustic Sensing. In Proceedings of the IEEE INFOCOM 2021-IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar]
- Sato, M.; Poupyrev, I.; Harrison, C. Touché: Enhancing touch interaction on humans, screens, liquids, and everyday objects. In Proceedings of the CHI ’12: SIGCHI Conference on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 483–492. [Google Scholar]
- Sun, K.; Zhao, T.; Wang, W.; Xie, L. VSkin: Sensing Touch Gestures on Surfaces of Mobile Devices Using Acoustic Signals. In Proceedings of the MobiCom ’18: 24th Annual International Conference on Mobile Computing and Networking, New Delhi, India, 29 October–2 November 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 591–605. [Google Scholar]
- Ono, M.; Shizuki, B.; Tanaka, J. Touch & activate: Adding interactivity to existing objects using active acoustic sensing. In Proceedings of the UIST ’13: 26th annual ACM symposium on User interface software and technology, St. Andrews, UK, 8–11 October 2013; Association for Computing Machinery: New York, NY, USA, 2013; pp. 31–40. [Google Scholar]
- Iwase, D.; Ito, Y.; Shin, H.; Onoe, T. SenseSurface: Using Active Acoustic Sensing to Detect What is Where. IPSJ J. 2019, 60, 1869–1880. [Google Scholar]
- Laput, G.; Brockmeyer, E.; Hudson, S.E.; Harrison, C. Acoustruments: Passive, Acoustically-Driven, Interactive Controls for Handheld Devices. In Proceedings of the CHI ’15: 33rd Annual ACM Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 2161–2170. [Google Scholar]
- Ono, M.; Shizuki, B.; Tanaka, J. Sensing Touch Force using Active Acoustic Sensing. In Proceedings of the TEI ’15: Ninth International Conference on Tangible, Embedded, and Embodied Interaction, Stanford, CA, USA, 15–19 January 2015; Association for Computing Machinery: New York, NY, USA, 2015; pp. 355–358. [Google Scholar]
- Davis, S.; Mermelstein, P. Comparison of parametric representations for monosyllabic word recognition in continuously spoken sentences. IEEE Trans. Acoust. 1980, 28, 357–366. [Google Scholar] [CrossRef] [Green Version]
- Mporas, I.; Ganchev, T.; Siafarikas, M. Comparison of speech features on the speech recognition task. J. Comput. Sci. 2007, 3, 608–616. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pressure (g) | Shear Force (g) |
|---|---|
| 300 g | 300 g |
| 300 g | 600 g |
| 600 g | 300 g |
| 600 g | 600 g |
| Shear-Force Direction | a | b | c | d |
|---|---|---|---|---|
| Left-handed | 77.7 | 76.0 | 78.1 | 82.5 |
| Right-handed | 62.9 | 68.9 | 70.3 | 68.8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Watanabe, H.; Sasaki, K.; Terada, T.; Tsukamoto, M. Method for Recognizing Pressing Position and Shear Force Using Active Acoustic Sensing on Gel Plates. Sensors 2022, 22, 9951. https://doi.org/10.3390/s22249951
Watanabe H, Sasaki K, Terada T, Tsukamoto M. Method for Recognizing Pressing Position and Shear Force Using Active Acoustic Sensing on Gel Plates. Sensors. 2022; 22(24):9951. https://doi.org/10.3390/s22249951
Chicago/Turabian StyleWatanabe, Hiroki, Kaito Sasaki, Tsutomu Terada, and Masahiko Tsukamoto. 2022. "Method for Recognizing Pressing Position and Shear Force Using Active Acoustic Sensing on Gel Plates" Sensors 22, no. 24: 9951. https://doi.org/10.3390/s22249951