
High Precision Location Estimation in Mountainous Areas Using GPS


Abstract
:1. Introduction
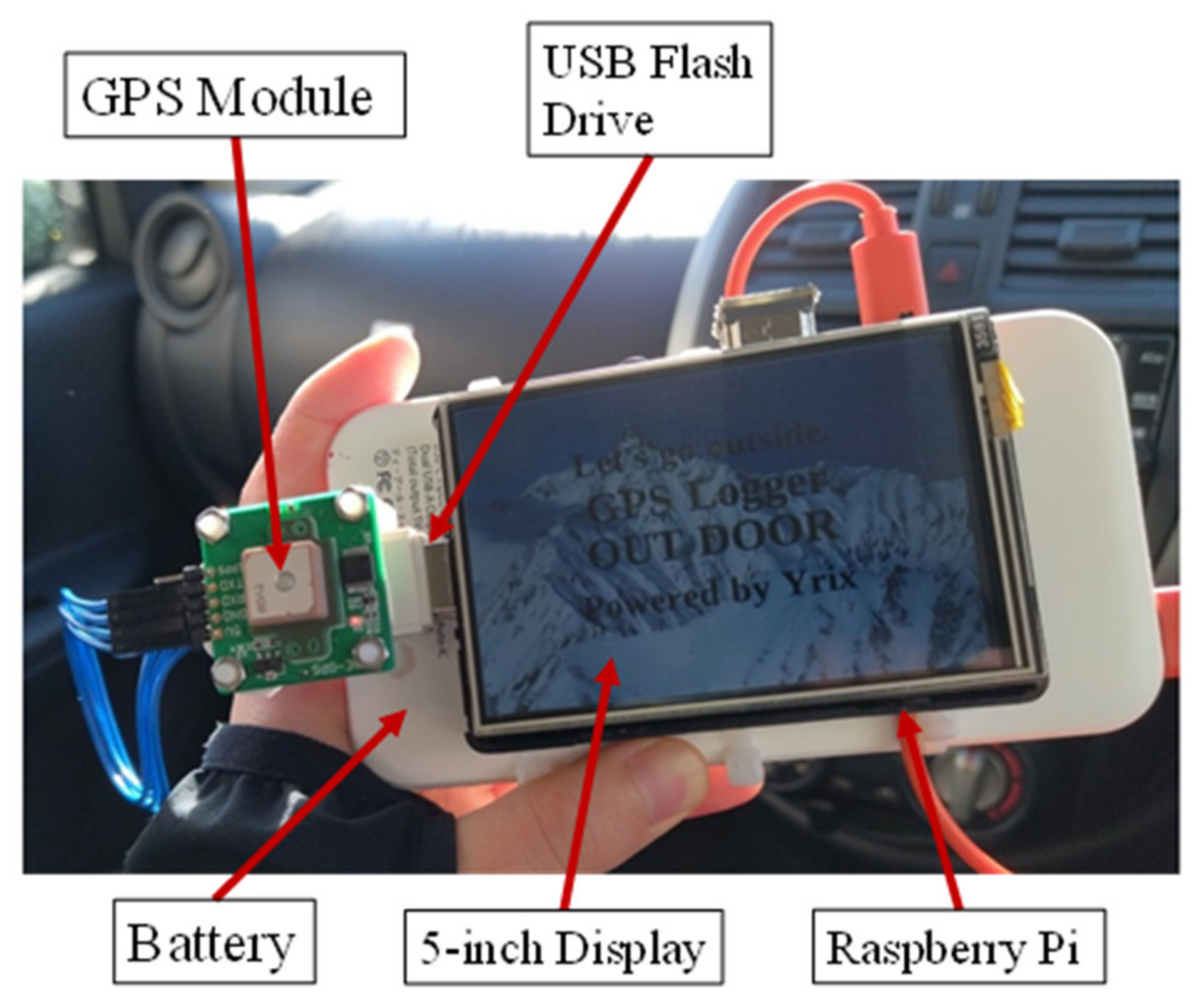
2. System Overview
3. Method
3.1. GPS Data Analysis
3.2. Estimate Position Processing
4. Experimental Evaluation
4.1. Experimental Enviroment
4.2. Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Statistical Topics No. 96. Mountaineering and Hiking Conditions—On the Occasion of ‘Mountain Day’—From the Results of the Basic Survey on Social Life. Japan Statistics Bureau, Ministry of Internal Affairs and Communications. Available online: https://www.stat.go.jp/data/shakai/topics/topi961.html (accessed on 10 August 2018).
- Yano Research Institute Ltd. 2021 Outdoor Business. Conducting Research on the Outdoor Equipment, Facilities and Rental Market. Available online: https://www.yano.co.jp/press-release/show/press_id/2844 (accessed on 16 November 2021).
- Life Safety Planning Division; Life Safety Bureau; National Police Agency. Overview of Mountain Disasters in 2020. Japan Metropolitan Police Department. Available online: https://www.npa.go.jp/news/release/2021/R02sangakusounan_gaikyou.pdf (accessed on 17 June 2021).
- Kurum, M.; Gurbuz, A.; Farhad, M.M. GNSS Reflectometry from Smartphones: Testing Performance of In-Built Antennas and GNSS Chips. In Proceedings of the IGARSS 2020—2020 IEEE International Geoscience and Remote Sensing Symposium, Waikoloa, HI, USA, 26 September–2 October 2020; pp. 6278–6281. [Google Scholar]
- Hakala, I.; Luomala, J. Peer-to-Peer Cooperative GNSS-Based Localization for Stationary Reference Nodes in Wireless Sensor Networks. In Proceedings of the 2017 International Conference on Localization and GNSS (ICL-GNSS), Nottingham, UK, 27–29 June; pp. 1–6.
- Özdemir, Z.; Tuğrul, B. Geofencing on the Real-Time GPS Tracking System and Improving GPS Accuracy with Moving Average, Kalman Filter and Logistic Regression Analysis. In Proceedings of the 2019 3rd International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 11–13 October 2019; pp. 1–6. [Google Scholar]
- Chunhakam, P.; Pummarin, P.; Jeen-im, P.; Wardkien, P.; Wisartpong, P.; Lertteerada, K. GPS Positon Predicting System by Kalman Filter with Velocity from OBD and Direction from Magnetometer. In Proceedings of the 2021 9th International Electrical Engineering Congress (iEECON), Pattaya, Thailand, 10–12 March 2021; pp. 444–447. [Google Scholar]
- Koohzadi, M.; Ebadollahi, S.; Vahidnia, R.; Dian, F.J. Implementation and Comparison of Different Tropospheric Models to Reduce Error Low-cost Real-time GPS Positioning. In Proceedings of the 2019 IEEE 10th Annual Information Technology, Electronics and Mobile Communication Conference (IEMCON), Vancouver, BC, Canada, 17–19 October 2019; pp. 82–86. [Google Scholar]
- Valle, R.L.L.; García, J.G.; Roncagliolo, P.A.; Muravchik, C.H. A practical RF front-end for high performance GNSS receivers. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 104–109. [Google Scholar]
- Elbahnasawy, M.; Shamseldin, T.; Habib, A. Image-Assisted GNSS/INS Navigation for UAV-Based Mobile Mapping Systems during GNSS Outages. In Proceedings of the 2018 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 23–26 April 2018; pp. 417–425. [Google Scholar]
- Brocard, P.; Salós, D.; Julien, O.; Mabilleau, M. Performance Evaluation of Multipath Mitigation Techniques for Critical Urban Applications Based on a Land Mobile Satellite Channel. In Proceedings of the Model. IEEE/ION PLANS 2014, Position Location and Navigation Symposium, Monterey, CA, USA, 5–8 May 2014; pp. 612–625. [Google Scholar]
- Kuang, C.; Liu, J.; Hou, F. Time Transfer Based on GPS Precise Point Positioning. In Proceedings of the 2006 8th international Conference on Signal Processing, Guilin, China, 16–20 November 2006. [Google Scholar]
- Park, K.W.; Suh, J.; Seo, B.; Lee, M.J.; Park, C. Design of Signal Acquisition and Tracking Process Based on Multi-Thread for Real-Time GNSS Software Receiver. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–4. [Google Scholar]
- Semanjski, S.; Muls, A.; Semanjski, I.; de Wilde, W. Use and Validation of Supervised Machine Learning Approach for Detection of GNSS Signal Spoofing. In Proceedings of the 2019 International Conference on Localization and GNSS (ICL-GNSS), Nuremberg, Germany, 4–6 June 2019; pp. 1–6. [Google Scholar]
- Sánchez-Naranjo, S.; González, F.A.; Ramos-Pollán, R.; Solé, M. Data driven Vertical Total Electron Content workflow for GNSS positioning for single frequency receivers. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- GPS Receiver Kit Instruction Manual. AE-GPS_Manual_r1.06. Akizuki Denshi Tsusho Ltd. Available online: https://akizukidenshi.com/download/ds/akizuki/AE-GPS_manual_r1.06_s.pdf (accessed on 12 February 2019).
- GYSFDMAXB Specification. GYSFDMAXB_spec_ae.pdf. Product Development Department, Composite Devices Division, Taiyo Yuden Co. Available online: https://akizukidenshi.com/download/ds/taiyouyuden/GYSFDMAXB_spec_ae.pdf (accessed on 28 January 2016).
- Sathyamorthy, D.; Shafii, S.; Amin, Z.F.M.; Jusoh, A.; Ali, S.Z. Evaluating the trade-off between Global Positioning System (GPS) Accuracy and Power Saving from Reduction of Number of GPS Receiver Channels. In Proceedings of the 2015 International Conference on Space Science and Communication (IconSpace), Langkawi, Malaysia, 10–12 August 2015; pp. 221–224. [Google Scholar]
- Hsu, L.; Tokura, H.; Kubo, N.; Gu, Y.; Kamijo, S. Multiple Faulty GNSS Measurement Exclusion Based on Consistency Check in Urban Canyons. IEEE Sens. J. 2017, 17, 1909–1917. [Google Scholar] [CrossRef] [Green Version]
- Blanco-Delgado, N.; de Haag, M.U. Multipath Analysis Using Code-Minus-Carrier for Dynamic Testing of GNSS Receivers. In Proceedings of the 2011 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 29–30 June 2011; pp. 25–30. [Google Scholar]
- García-Molina, J.A. Land Mobile Multipath Channel Reduction Effects on a Real GNSS Receiver. In Proceedings of the 2010 5th ESA Workshop on Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing (NAVITEC), Noordwijk, The Netherlands, 8–10 December 2010; pp. 1–7. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CPU | ARM Cortex-A53 (1.4 GHz Quad-Core) |
| RAM | 1 GB |
| DPC | 2 W |
| OS | Debian 11.0 (bullseye) |
| Longitude | Latitude | Error (m) |
|---|---|---|
| 35.62771 | 139.4649 | 2 |
| 35.62763 | 139.4648 | 5 |
| 35.62754 | 139.4648 | 6 |
| 35.62736 | 139.4649 | 0 |
| Longitude | Latitude | Error (m) | Longitude | Latitude | Error (m) |
|---|---|---|---|---|---|
| 35.80406 | 138.7152 | 1 | 35.80401 | 138.7152 | 2 |
| 35.8041 | 138.7152 | 6 | 35.8041 | 138.7152 | 1 |
| 35.80409 | 138.7153 | 7 | 35.80414 | 138.7152 | 4 |
| 35.80414 | 138.7152 | 2 | 35.80415 | 138.7152 | 3 |
| 35.80416 | 138.7152 | 2 | 35.80419 | 138.7152 | 0 |
| 35.80426 | 138.7152 | 1 | 35.80419 | 138.7152 | 1 |
| 35.8043 | 138.7151 | 4 | 35.80428 | 138.7151 | 0 |
| 35.80434 | 138.7151 | 6 | 35.80431 | 138.7151 | 0 |
| 35.80442 | 138.7151 | 4 | 35.80434 | 138.7151 | 1 |
| 35.80442 | 138.7151 | 8 | 35.80439 | 138.715 | 1 |
| 35.80435 | 138.715 | 9 | 35.80437 | 138.715 | 0 |
| 35.80438 | 138.7149 | 4 | 35.80431 | 138.7149 | 0 |
| 35.80436 | 138.7149 | 1 | 35.80433 | 138.7149 | 1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kunisada, Y.; Premachandra, C. High Precision Location Estimation in Mountainous Areas Using GPS. Sensors 2022, 22, 1149. https://doi.org/10.3390/s22031149
Kunisada Y, Premachandra C. High Precision Location Estimation in Mountainous Areas Using GPS. Sensors. 2022; 22(3):1149. https://doi.org/10.3390/s22031149
Chicago/Turabian StyleKunisada, Yugo, and Chinthaka Premachandra. 2022. "High Precision Location Estimation in Mountainous Areas Using GPS" Sensors 22, no. 3: 1149. https://doi.org/10.3390/s22031149