
FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area


Abstract
:1. Introduction
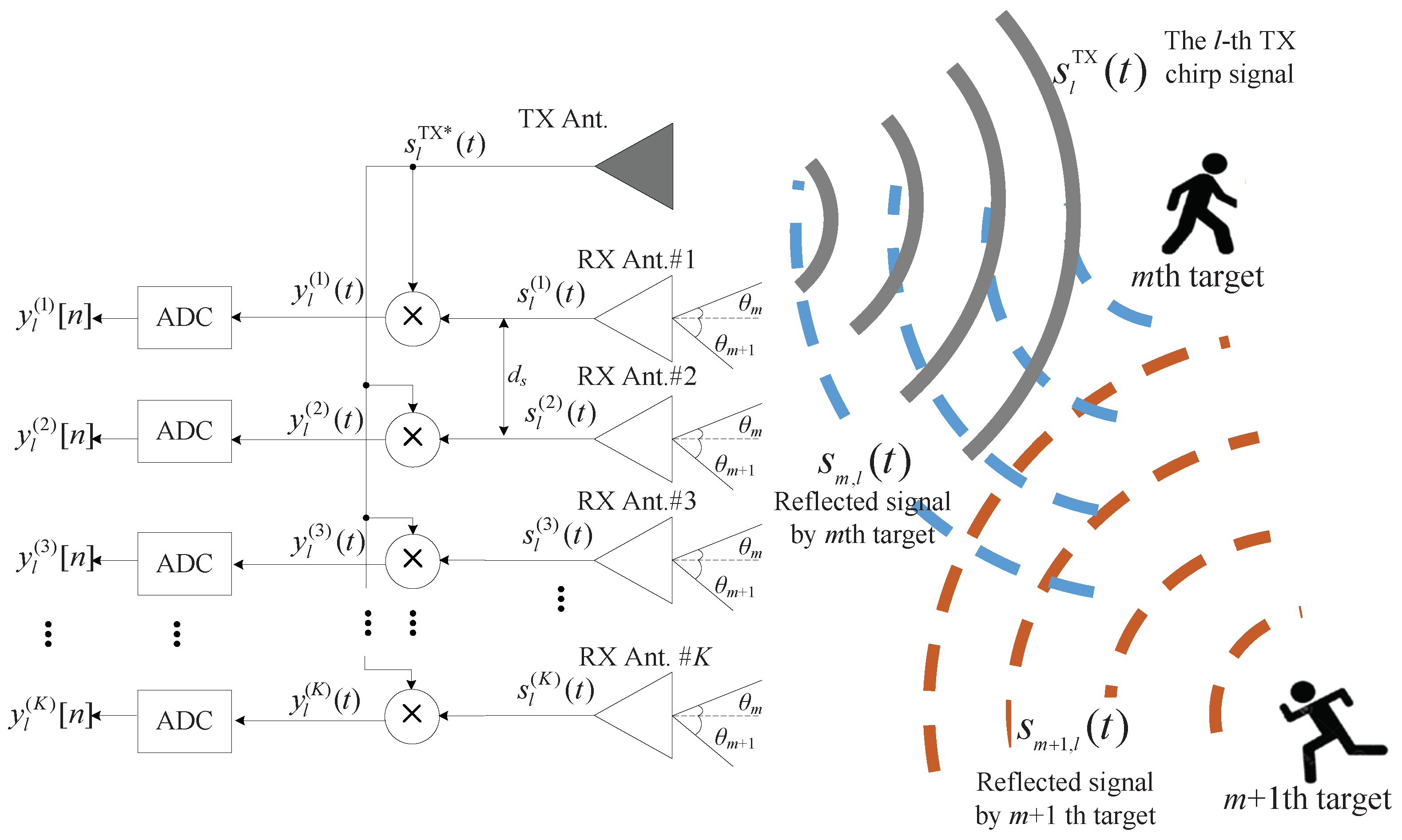
2. System Model and Data Structure
3. 2D FFT and 2D MUSIC Algorithms for FMCW Radar
3.1. 2D FFT Algorithm
3.2. 2D MUSIC Algorithm
3.3. Low Complexity MUSIC Algorithm Using FFT Estimation
4. Proposed Subspace-Based Estimation Algorithm for FMCW Radar
5. Performance Evaluation
5.1. Simulation Results
5.2. Complexity Analysis
5.3. Experiments
6. Conclusions
7. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mahafza, B.R. Radar Systems Analysis and Design Using MATLAB, 3rd ed.; CRC Press: Boca Raton, FL, USA, 2013. [Google Scholar]
- Griffiths, H.; Cohen, L.; Watts, S.; Mokole, E.; Baker, C.; Wicks, M.; Blunt, S. Radar spectrum engineering and management: Technical and regulatory issues. Proc. IEEE 2015, 103, 85–102. [Google Scholar] [CrossRef]
- Richards, M.A. Fundementals of Radar Signal Processing; Tata McGraw-Hill Education: New York, NY, USA, 2005. [Google Scholar]
- Skolnik, M.I. Introduction to Radar Systems; Tata McGraw-Hill Education: New York, NY, USA, 2001. [Google Scholar]
- Kim, Y.; Son, G.; Song, C.; Kim, H. On the Deployment and Noise Filtering of Vehicular Radar Application for Detection Enhancement in Roads and Tunnels. Sensors 2018, 3, 837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Patole, S.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Stove, A.G. Linear FMCW radar techniques. IEE Proc. Rad. Sig. Process. 1992, 139, 343–350. [Google Scholar] [CrossRef]
- Dudek, M.; Nasr, I.; Bozsik, G.; Hamouda, M.; Kissinger, D.; Fischer, G. System analysis of a phased-array radar applying adaptive beam-control for future automotive safety applications. IEEE Trans. Veh. Tech. 2015, 64, 34–47. [Google Scholar] [CrossRef]
- Matthew, A.; Matthew, R.; Kevin, C. On the application of digital moving target indication techniques to short-range FMCW radar data. IEEE Sens. J. 2017, 18, 4167–4175. [Google Scholar]
- Saponara, S.; Neri, B. Radar sensor signal acquisition and multidimensional FFT processing for surveillance applications in transport systems. IEEE Trans. Instrum. Meas. 2017, 66, 604–615. [Google Scholar] [CrossRef]
- Hyun, E.; Jin, Y.; Lee, J. A pedestrian detection scheme using a coherent phase difference method based on 2D range-Doppler FMCW radar. Sensors 2016, 16, 124. [Google Scholar] [CrossRef] [Green Version]
- Choi, B.; Oh, D.; Kim, S.; Chong, J.; Li, Y. Long-Range Drone Detection of 24 G FMCW Radar with E-plane Sectoral Horn Array. Sensors 2018, 18, 4171. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Oh, D.; Kim, S.; Chong, J. Dual Channel S-Band Frequency Modulated Continuous Wave Through-Wall Radar Imaging. Sensors 2018, 18, 311. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Jin, Y.; Kim, S.; Lee, J. A low-complexity FMCW surveillance radar algorithm using two random beat signals. Sensors 2018, 19, 608. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Kim, S.; Lee, J. A novel DFT-based DOA estimation by a virtual array extension using simple multiplications for FMCW radar. Sensors 2018, 18, 1560. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, B.; Kim, S.; Jin, Y.; Lee, J. Low-complexity joint range and Doppler FMCW radar algorithm based on number of targets. Sensors 2020, 20, 51. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ali, H.; Ercelebi, E. Design and implementation of FMCW radar using the raspberry Pi single board computer 2017. In Proceedings of the 2017 10th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 30 November–2 December 2017. [Google Scholar]
- Komarov, I.V.; Smolskiy, S.M. Fundamentals of Short Range FM Radar; Artech House Publishers: London, UK, 2003. [Google Scholar]
- Meng, Z.; Zhou, W. Direction-of-Arrival Estimation in Coprime Array Using the ESPRIT-Based Method. Sensors 2019, 19, 707. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jung, Y.; Jeon, H.; Lee, S.; Jung, Y.H. Scalable ESPRIT Processor for Direction-of-Arrival Estimation of Frequency Modulated Continuous Wave Radar. Electronics 2021, 10, 695. [Google Scholar] [CrossRef]
- Wawery, N.P.; Konditi, D.B.O.; Langat, P.K. Performance Analysis of MUSIC, Root-MUSIC and ESPRIT DOA Estimation Algorithm. Int. J. Electron. Commun. Eng. 2014, 8, 209–216. [Google Scholar]
- Lavate, T.B.; Kokate, V.K.; Sapkal, A.M. Performance Analysis of MUSIC and ESPRIT DOA Estimation algorithms for adaptive array smart antenna in mobile communication. In Proceedings of the 2010 Second International Conference on Computer and Network Technology, Bangkok, Thailand, 23 April 2010. [Google Scholar]
- Nie, W.; Xu, K.; Feng, D.; Wu, C.Q.; Hou, A.; Yin, X. A fast algorithm for 2D DOA estimation using an omnidirectional sensor array. Sensors 2017, 17, 515. [Google Scholar] [CrossRef] [Green Version]
- Basikolo, T.; Arai, H. APRD-MUSIC algorithm DOA estimation for reactance based uniform circular array. IEEE Trans. Antennas Propag. 2016, 64, 4415–4422. [Google Scholar] [CrossRef]
- Seo, J.; Lee, J.; Park, J.; Kim, H.; You, S. Distributed Two-Dimensional MUSIC for Joint Range and Angle Estimation with Distributed FMCW MIMO Radars. Sensors 2021, 22, 7618. [Google Scholar] [CrossRef]
- Li, Y.; Choi, B.; Chong, J.; Oh, D. 3D Target Localization of Modified 3D MUSIC for a Triple-Channel K-Band Radar. Sensors 2018, 5, 1634. [Google Scholar] [CrossRef] [Green Version]
- Nam, H.; Li, Y.; Choi, B.; Oh, D. 3D-Subspace-Based Auto-Paired Azimuth Angle, Elevation Angle, and Range Estimation for 24G FMCW Radar with an L-Shaped Array. Sensors 2018, 4, 1113. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fang, J.; Liu, Y.; Jiang, Y.; Lu, Y.; Zhang, Z.; Chen, H.; Wang, L. 2D-DOD and 2D-DOA Estimation for a Mixture of Circular and Strictly Noncircular Sources Based on L-Shaped MIMO Radar. Sensors 2020, 8, 2177. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, B.; Kim, S.; Jin, Y.; Lee, J. High-Efficiency Super-Resolution FMCW Radar Algorithm Based on FFT Estimation. Sensors 2021, 12, 4018. [Google Scholar] [CrossRef] [PubMed]
- Oh, D.; Lee, J. Low-complexity range-azimuth fmcw radar sensor using joint angle and delay estimation without SVD and EVD. IEEE Sens. J. 2015, 15, 4799–4811. [Google Scholar] [CrossRef]
- Li, B.; Wang, S.; Zhang, J.; Cao, X.; Zhao, C. Fast MUSIC Algorithm for mm-Wave Massive-MIMO Radar. arXiv 2019, arXiv:1911.07434. [Google Scholar]
- Kim, B.; Jin, Y.; Lee, J.; Kim, S. Low-complexity MUSIC-based direction-of-arrival detection algorithm for frequency-modulated continuous-wave vital radar. Sensors 2020, 20, 4295. [Google Scholar] [CrossRef] [PubMed]
- Li, B.; Wang, S.; Zhang, J.; Cao, X.; Zhao, C. Fast Randomized-MUSIC for Mm-Wave Massive MIMO Radars. IEEE Trans. Veh. Tech. 2021, 70, 2. [Google Scholar] [CrossRef]
- Kim, S.; Lee, K. Low-Complexity Joint Extrapolation-MUSIC-Based 2-D Parameter Estimator for Vital FMCW Radar. IEEE Sens. J. 2019, 19, 2205–2216. [Google Scholar] [CrossRef]
- Francesco, B.; Wim, R.; Peter, H. 2D-MUSIC Technique Applied to A Coherent FMCW MIMO Radar. In Proceedings of the IET International Conference on Radar Systems 2012, Glasgow, UK, 22 October 2012. [Google Scholar]
- Zhang, R.; Quan, Y.; Zhu, S.; Yang, L.; Li, Y.; Xing, M. Joint High-Resolution Range and DOA Estimation via MUSIC Method Based on Virtual Two-Dimensional Spatial Smoothing for OFDM Radar. Int. J. Antennas Propag. 2018, 2018, 6012426. [Google Scholar] [CrossRef]
- Nauman, A.B.; Mohammad, B.M. Comparison of direction of Arrival estimation techniques for closely spaced targets. Int. Future Comput. Commun. 2013, 2, 654–659. [Google Scholar]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Center frequency, | 24 GHz |
| Bandwidth, B | 100 MHz |
| Chirp duration, T | 100 μs |
| SNR | 10 dB |
| Number of samples, | 66 |
| Sampling frequency, | 0.67 MHz |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, B.-S.; Jin, Y.; Lee, J.; Kim, S. FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area. Sensors 2022, 22, 1202. https://doi.org/10.3390/s22031202
Kim B-S, Jin Y, Lee J, Kim S. FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area. Sensors. 2022; 22(3):1202. https://doi.org/10.3390/s22031202
Chicago/Turabian StyleKim, Bong-Seok, Youngseok Jin, Jonghun Lee, and Sangdong Kim. 2022. "FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area" Sensors 22, no. 3: 1202. https://doi.org/10.3390/s22031202
APA StyleKim, B.-S., Jin, Y., Lee, J., & Kim, S. (2022). FMCW Radar Estimation Algorithm with High Resolution and Low Complexity Based on Reduced Search Area. Sensors, 22(3), 1202. https://doi.org/10.3390/s22031202