
Motion Estimation and Hand Gesture Recognition-Based Human–UAV Interaction Approach in Real Time

 , and
, and 
Abstract
:1. Introduction
1.1. Research Backgrounds
1.2. Problem Description
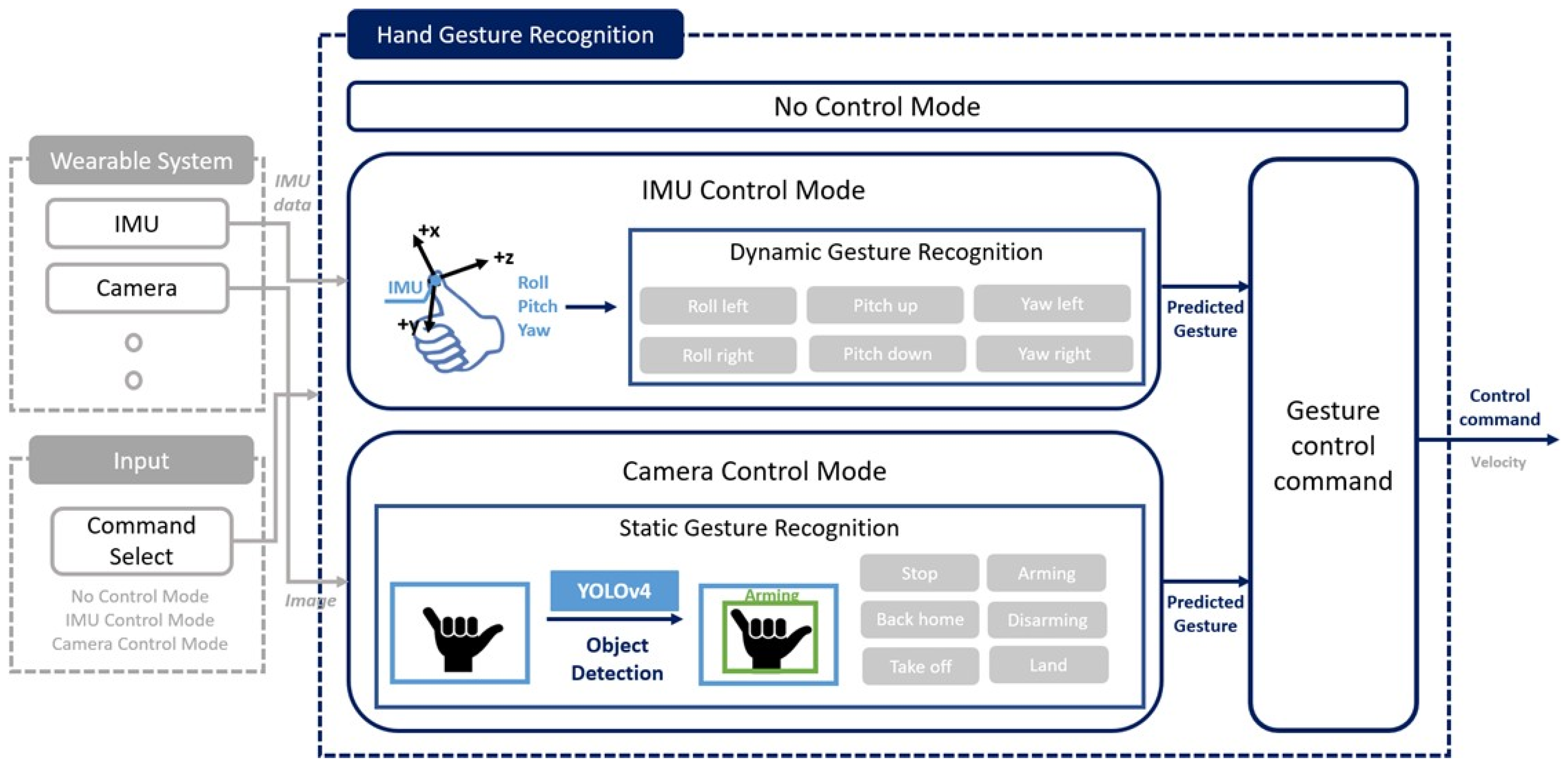
- We propose a safer and more intuitive interface by combining IMU-based motion capture system and vision-based system.
- The proposed system compensates for the disadvantages of sensor-based system: proposal of wearable system.
- The proposed system compensates for the disadvantages of vision-based system: recognizing complex dynamic gestures using an IMU sensor reduces system complexity and computational amount.
2. Previous Research
2.1. Sensor-Based Gesture Recognition Systems
2.2. Vision-Based Gesture Recognition Systems
3. System Architecture
3.1. Wearable System
3.2. Hand Gesture Recognition System
4. Motion Capture and Hand Gesture Recognition-Based Real-Time HUI System
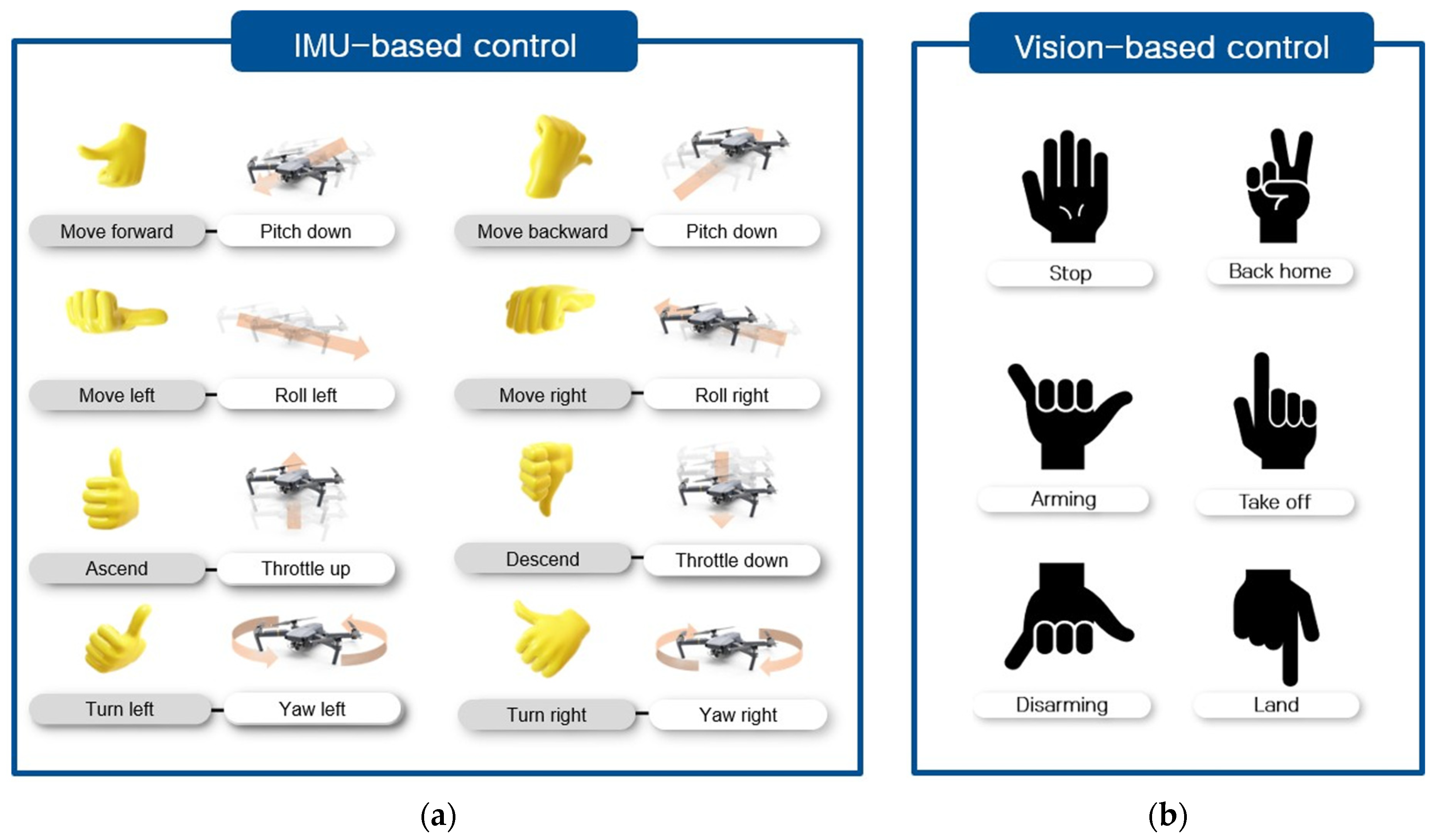
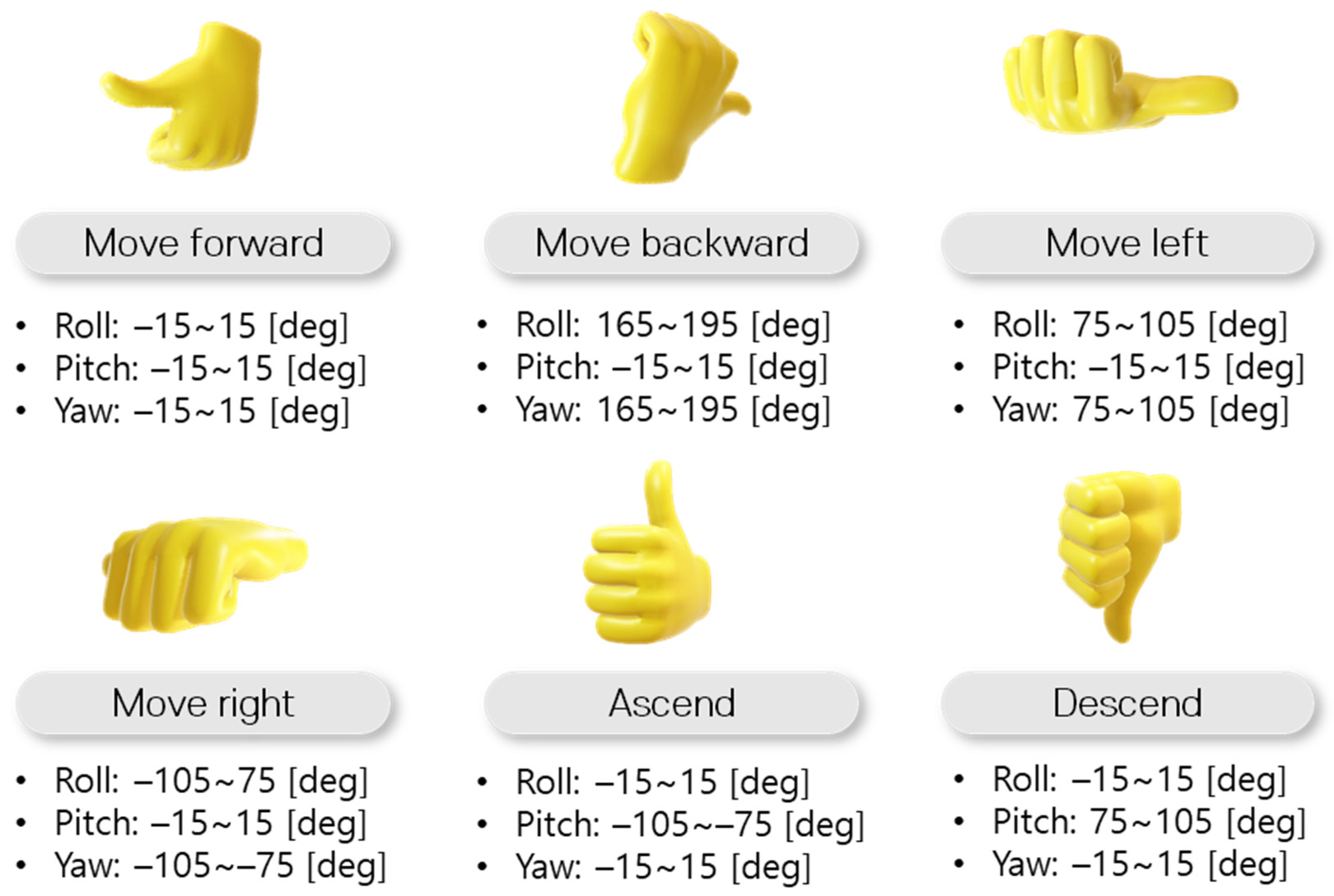
4.1. Gesture Definition
4.2. Gesture Recognition of IMU-Based Motion Capture System
4.2.1. Alignment
4.2.2. Orientation Estimation
4.3. Static Gesture Recognition
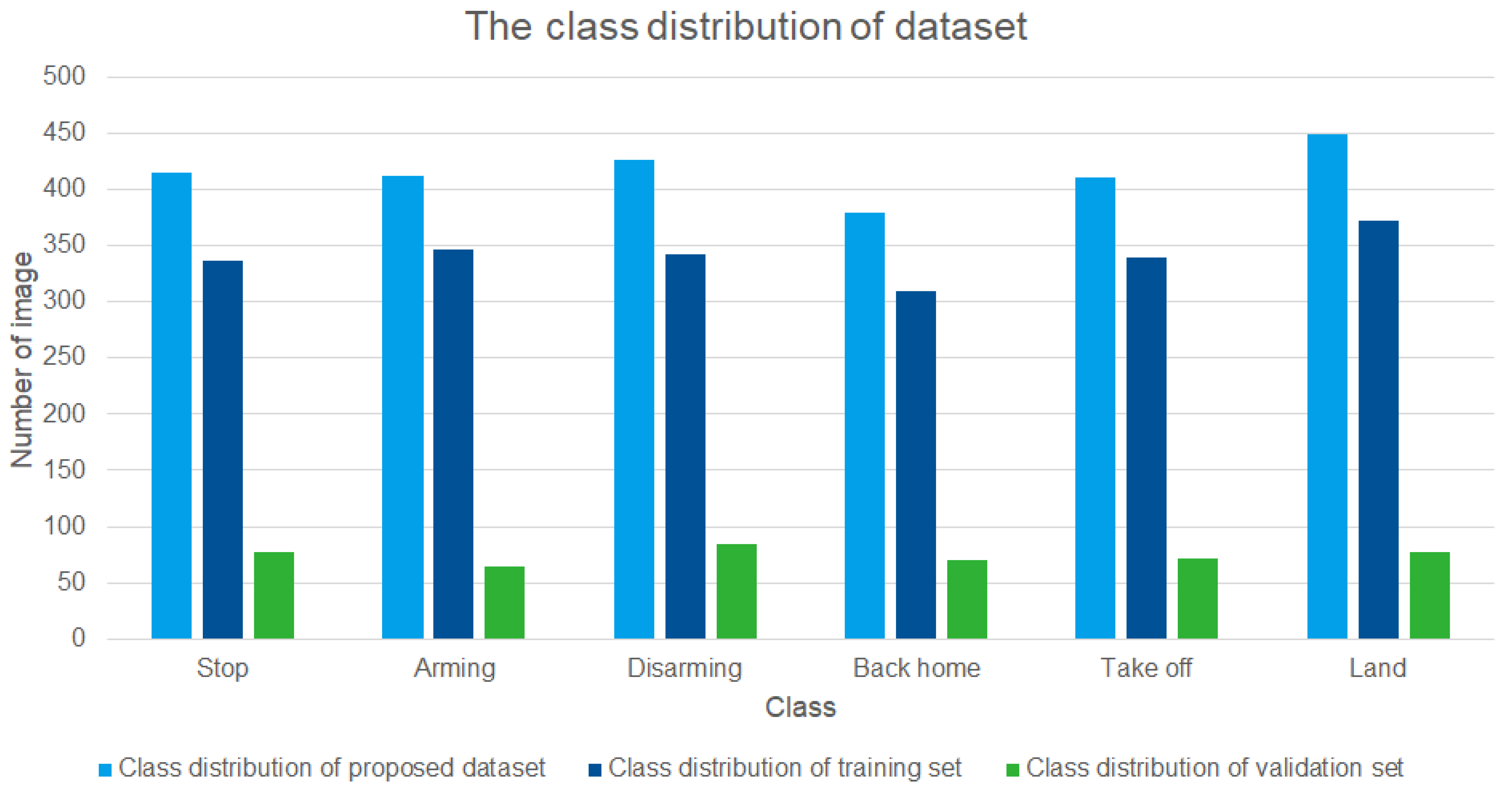
4.3.1. Dataset Construction
4.3.2. Static Gesture Recognition Model
5. Experiments
5.1. Experimental Setup
5.1.1. Wearable System Design
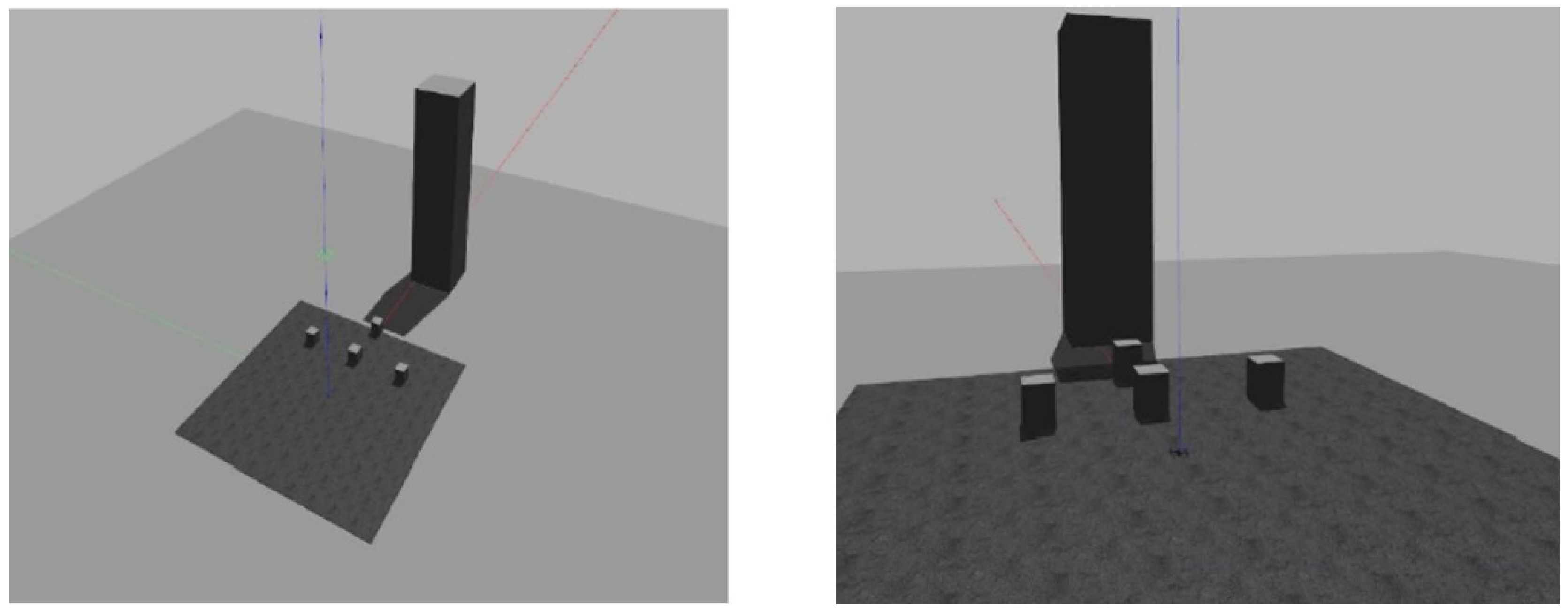
5.1.2. Simulation Setup
5.2. Experimental Results
5.2.1. Evaluation of VGR System-Based Gesture Classification
5.2.2. Evaluation of the Efficiency of Gesture through IMU-Based Motion Capture System
5.2.3. Evaluation of Usability in Terms of Lap Time
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tezza, D.; Andujar, M. The state-of-the-art of human–drone interaction: A survey. IEEE Access 2019, 7, 167438–167454. [Google Scholar] [CrossRef]
- Chen, B.; Hua, C.; Li, D.; He, Y.; Han, J. Intelligent Human–UAV interaction system with joint cross-validation over Action–Gesture recognition and scene understanding. Appl. Sci. 2019, 9, 3277. [Google Scholar] [CrossRef] [Green Version]
- Cauchard, J.R.; E, J.L.; Zhai, K.Y.; Landay, J.A. Drone & me: An exploration into natural human-drone interaction. In Proceedings of the 2015 ACM International Joint Conference on Pervasive and Ubiquitous Computing, Osaka, Japan, 7–11 September 2015; pp. 361–365. [Google Scholar]
- Jane, L.; Ilene, L.; Landay, J.A.; Cauchard, J.R. Drone & Wo: Cultural Influences on Human-Drone Interaction Techniques. CHI 2017, 17, 6794–6799. [Google Scholar]
- Abtahi, P.; Zhao, D.Y.; E, J.L.; Landay, J.A. Drone near me: Exploring touch-based human-drone interaction. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 34. [Google Scholar] [CrossRef] [Green Version]
- Liu, C.; Szirányi, T. Real-Time Human Detection and Gesture Recognition for On-Board UAV Rescue. Sensors 2021, 21, 2180. [Google Scholar] [CrossRef] [PubMed]
- Dang, L.M.; Min, K.; Wang, H.; Piran, M.J.; Lee, C.H.; Moon, H. Sensor-based and vision-based human activity recognition: A comprehensive survey. Pattern Recognit. 2020, 108, 107561. [Google Scholar] [CrossRef]
- Müezzinoğlu, T.; Karaköse, M. Wearable Glove Based Approach for Human-UAV Interaction. In Proceedings of the 2020 IEEE International Symposium on Systems Engineering (ISSE), Vienna, Austria, 12 October–12 November 2020; pp. 1–6. [Google Scholar]
- Popa, M. Hand gesture recognition based on accelerometer sensors. In Proceedings of the 7th International Conference on Networked Computing and Advanced Information Management, Gyeongju, Korea, 21–23 June 2011; pp. 115–120. [Google Scholar]
- Pandit, A.; Dand, D.; Mehta, S.; Sabesan, S.; Daftery, A. A simple wearable hand gesture recognition device using iMEMS. In Proceedings of the 2009 International Conference of Soft Computing and Pattern Recognition, Malacca, Malaysia, 4–9 December 2009; pp. 592–597. [Google Scholar]
- Ronao, C.A.; Cho, S.B. Recognizing human activities from smartphone sensors using hierarchical continuous hidden Markov models. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147716683687. [Google Scholar] [CrossRef]
- Sok, P.; Xiao, T.; Azeze, Y.; Jayaraman, A.; Albert, M.V. Activity recognition for incomplete spinal cord injury subjects using hidden Markov models. IEEE Sens. J. 2018, 18, 6369–6374. [Google Scholar] [CrossRef] [Green Version]
- Abidine, B.; Fergani, L.; Fergani, B.; Oussalah, M. The joint use of sequence features combination and modified weighted SVM for improving daily activity recognition. Pattern Anal. Appl. 2018, 21, 119–138. [Google Scholar] [CrossRef]
- Wang, X.; Xia, M.; Cai, H.; Gao, Y.; Cattani, C. Hidden-markov-models-based dynamic hand gesture recognition. Math. Probl. Eng. 2012, 2012, 986134. [Google Scholar] [CrossRef]
- Kassab, M.A.; Ahmed, M.; Maher, A.; Zhang, B. Real-time human-UAV interaction: New dataset and two novel gesture-based interacting systems. IEEE Access 2020, 8, 195030–195045. [Google Scholar] [CrossRef]
- Liu, C.; Szirányi, T. Gesture Recognition for UAV-based Rescue Operation based on Deep Learning. In Proceedings of the International Conference on Image Processing and Vision Engineering (IMPROVE 2021), Online, 28–30 April 2021; pp. 180–187. [Google Scholar]
- Trindade, P.; Lobo, J. Distributed accelerometers for gesture recognition and visualization. In Proceedings of the Doctoral Conference on Computing, Electrical and Industrial Systems, Costa de Caparica, Portugal, 21–23 February 2011; pp. 215–223. [Google Scholar]
- Lementec, J.C.; Bajcsy, P. Recognition of arm gestures using multiple orientation sensors: Gesture classification. In Proceedings of the 7th International IEEE Conference on Intelligent Transportation Systems (IEEE Cat. No. 04TH8749), Washington, WA, USA, 3–6 October 2004; pp. 965–970. [Google Scholar]
- Kim, J.H.; Thang, N.D.; Kim, T.S. 3-D hand motion tracking and gesture recognition using a data glove. In Proceedings of the 2009 IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 1013–1018. [Google Scholar]
- Guiry, J.J.; Van de Ven, P.; Nelson, J. Multi-sensor fusion for enhanced contextual awareness of everyday activities with ubiquitous devices. Sensors 2014, 14, 5687–5701. [Google Scholar] [CrossRef] [PubMed]
- Lara, O.D.; Labrador, M.A. A survey on human activity recognition using wearable sensors. IEEE Commun. Surv. Tutor. 2012, 15, 1192–1209. [Google Scholar] [CrossRef]
- Shoaib, M.; Bosch, S.; Incel, O.D.; Scholten, H.; Havinga, P.J. Complex human activity recognition using smartphone and wrist-worn motion sensors. Sensors 2016, 16, 426. [Google Scholar] [CrossRef] [PubMed]
- Fleury, A.; Vacher, M.; Noury, N. SVM-based multimodal classification of activities of daily living in health smart homes: Sensors, algorithms, and first experimental results. IEEE Trans. Inf. Technol. Biomed. 2009, 14, 274–283. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mortazavi, B.; Nemati, E.; VanderWall, K.; Flores-Rodriguez, H.G.; Cai, J.Y.J.; Lucier, J.; Naeim, A.; Sarrafzadeh, M. Can smartwatches replace smartphones for posture tracking? Sensors 2015, 15, 26783–26800. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Muezzinoglu, T.; Karakose, M. An Intelligent Human–Unmanned Aerial Vehicle Interaction Approach in Real Time Based on Machine Learning Using Wearable Gloves. Sensors 2021, 21, 1766. [Google Scholar] [CrossRef] [PubMed]
- Mardiyanto, R.; Utomo, M.F.R.; Purwanto, D.; Suryoatmojo, H. Development of hand gesture recognition sensor based on accelerometer and gyroscope for controlling arm of underwater remotely operated robot. In Proceedings of the 2017 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 28–29 August 2017; pp. 329–333. [Google Scholar]
- Kim, M.K.; Ryu, K.; Oh, Y.; Oh, S.R.; Kim, K. Implementation of real-time motion and force capturing system for tele-manipulation based on semg signals and imu motion data. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 5658–5664. [Google Scholar]
- Monajjemi, M.; Mohaimenianpour, S.; Vaughan, R. UAV, come to me: End-to-end, multi-scale situated HRI with an uninstrumented human and a distant UAV. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4410–4417. [Google Scholar]
- Nagi, J.; Giusti, A.; Di Caro, G.A.; Gambardella, L.M. Human control of UAVs using face pose estimates and hand gestures. In Proceedings of the 2014 9th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Bielefeld, Germany, 3–6 March 2014; pp. 1–2. [Google Scholar]
- Trindade, P.; Lobo, J.; Barreto, J.P. Hand gesture recognition using color and depth images enhanced with hand angular pose data. In Proceedings of the 2012 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems (MFI), Hamburg, Germany, 13–15 September 2012; pp. 71–76. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE conference on computer vision and pattern recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Meier, L.; Honegger, D.; Pollefeys, M. PX4: A node-based multithreaded open source robotics framework for deeply embedded platforms. In Proceedings of the 2015 IEEE international conference on robotics and automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6235–6240. [Google Scholar]
- Korea Transportation Safety Authority. Korea Transportation Safety Authority—Aviation Safety Test. Available online: https://www.kotsa.or.kr/eng/aviation/aviationTest.do (accessed on 29 September 2021).
- Ma, Y.; Liu, Y.; Jin, R.; Yuan, X.; Sekha, R.; Wilson, S.; Vaidyanathan, R. Hand gesture recognition with convolutional neural networks for the multimodal UAV control. In Proceedings of the 2017 Workshop on Research, Education and Development of Unmanned Aerial Systems (RED-UAS), Linkoping, Sweden, 3–5 October 2017; pp. 198–203. [Google Scholar]
- Tsai, C.C.; Kuo, C.C.; Chen, Y.L. 3D Hand Gesture Recognition for Drone Control in Unity. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; pp. 985–988. [Google Scholar]
- Ettikkalayil, J.M. Design, Implementation, and Performance Study of an Open Source Eye-Control System to Pilot a Parrot ar. Drone Quadrocopter. Master’s Thesis, City University of New York, New York, NY, USA, 2013. [Google Scholar]
- Merrell, T.W. Evaluation of Consumer Drone Control Interface. Master’s Thesis, Wright State University, Dayton, OH, USA, 2018. [Google Scholar]
- Park, J.; Son, H.; Lee, J.; Choi, J. Driving assistant companion with voice interface using long short-term memory networks. IEEE Trans. Ind. Inform. 2018, 15, 582–590. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HUI | Advantages | Disadvantages |
|---|---|---|
| Wearable Sensors |
|
|
| More User-Friendly Remote Controller |
|
|
| Speech |
|
|
| Gesture |
|
|
| No. | Command | No. | Command |
|---|---|---|---|
| 1 | Move forward (Pitch down) | 8 | Descend (Throttle down) |
| 2 | Move backward (Pitch up) | 9 | Arming |
| 3 | Move left (Roll left) | 10 | Disarming |
| 4 | Move right (Roll right) | 11 | Take off |
| 5 | Turn left (Yaw left) | 12 | Land |
| 6 | Turn right (Yaw right) | 13 | Back home |
| 7 | Ascend (Throttle up) | 14 | Stop |
| No. | Segment | Operation |
|---|---|---|
| 1 | IMU alignment | Proceed with IMU alignment in neural mode [N] |
| 2 | Arming | Switch to camera control mode [C] |
| Perform Arming command with vision-based gesture recognition | ||
| 3 | Take off | Perform Take off command with vision-based gesture recognition |
| 4 | Straight and level flight | Switch to IMU control mode [I] |
| Mode home position—C point (5 s waiting) with IMU-based gesture recognition | ||
| 5 | Backward and level flight | Move C point—home position with IMU-based gesture recognition |
| 6 | Rhombus flight | Move home position—B point—C point—D point—home sequentially through IMU-based gesture recognition |
| 7 | Target approach | Move home position—building structure through IMU-based gesture recognition |
| 8 | Back home | Switch to camera control mode [C] |
| Perform Back home command with vision-based gesture recognition | ||
| 9 | Stop | Perform Stop command with vision-based gesture recognition |
| 10 | Land | Perform Land command with vision-based gesture recognition |
| 11 | Disarming | Perform Disarming command with vision-based gesture recognition |
| Function | Accuracy | |
|---|---|---|
| IMU-based gesture command | Move forward | 97.78% |
| Move backward | 97.78% | |
| Move left | 98.89% | |
| Move right | 100% | |
| Turn right | 91.11% | |
| Turn left | 92.22% | |
| Ascend | 96.67% | |
| Descend | 100% |
| Authors | Interacted System | Deep-Learning Algorithm | Number of Dynamic Gestures | Processing Speed of Dynamic Gesture Recognition (ms) |
|---|---|---|---|---|
| Chen, B. [2] | UAV | Yes (GNN) | 6 | 45 |
| Kasab, Mohamed A. [15] | UAV | Yes (Developed Tiny-YOLOv2) | 10 | 42.7786 |
| Liu, C. [6] | UAV | Yes (CNN) | 2 | 20 |
| Ours | UAV | No (IMU-based system) | 8 | 0.089 |
| Joystick-Based Control (mm:ss) | Proposed Method (mm:ss) | |
|---|---|---|
| Participant 1 | 02:34 | 02:29 |
| Participant 2 | 03:01 | 02:34 |
| Participant 3 | 02:11 | 01:59 |
| Participant 4 | 03:04 | 02:13 |
| Participant 5 | 02:14 | 01:31 |
| Participant 6 | 02:07 | 02:19 |
| Participant 7 | 02:46 | 02:38 |
| Participant 8 | 02:54 | 02:38 |
| Participant 9 | 02:25 | 02:02 |
| Participant 10 | 02:34 | 02:16 |
| Average | 02:35 | 02:16 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, M.; Na, Y.; Song, H.; Kim, G.; Yun, J.; Kim, S.; Moon, C.; Jo, K. Motion Estimation and Hand Gesture Recognition-Based Human–UAV Interaction Approach in Real Time. Sensors 2022, 22, 2513. https://doi.org/10.3390/s22072513
Yoo M, Na Y, Song H, Kim G, Yun J, Kim S, Moon C, Jo K. Motion Estimation and Hand Gesture Recognition-Based Human–UAV Interaction Approach in Real Time. Sensors. 2022; 22(7):2513. https://doi.org/10.3390/s22072513
Chicago/Turabian StyleYoo, Minjeong, Yuseung Na, Hamin Song, Gamin Kim, Junseong Yun, Sangho Kim, Changjoo Moon, and Kichun Jo. 2022. "Motion Estimation and Hand Gesture Recognition-Based Human–UAV Interaction Approach in Real Time" Sensors 22, no. 7: 2513. https://doi.org/10.3390/s22072513
APA StyleYoo, M., Na, Y., Song, H., Kim, G., Yun, J., Kim, S., Moon, C., & Jo, K. (2022). Motion Estimation and Hand Gesture Recognition-Based Human–UAV Interaction Approach in Real Time. Sensors, 22(7), 2513. https://doi.org/10.3390/s22072513