
Computationally Efficient Implementation of Joint Detection and Parameters Estimation of Signals with Dispersive Distortions on a GPU




Abstract
:1. Introduction
2. Related Work
3. Analytical Formulation of the Problem
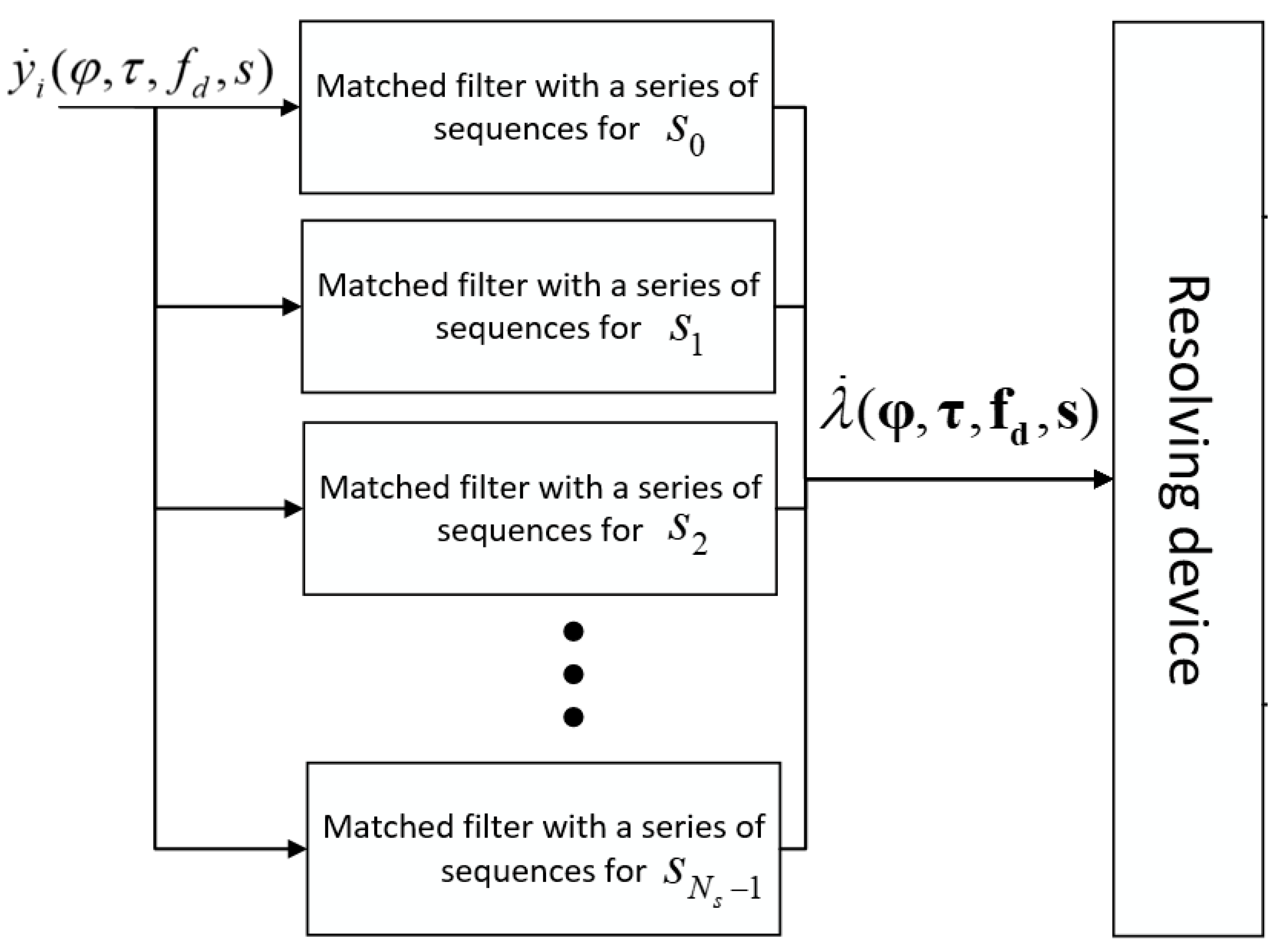
4. Implementation of a Matched Filter
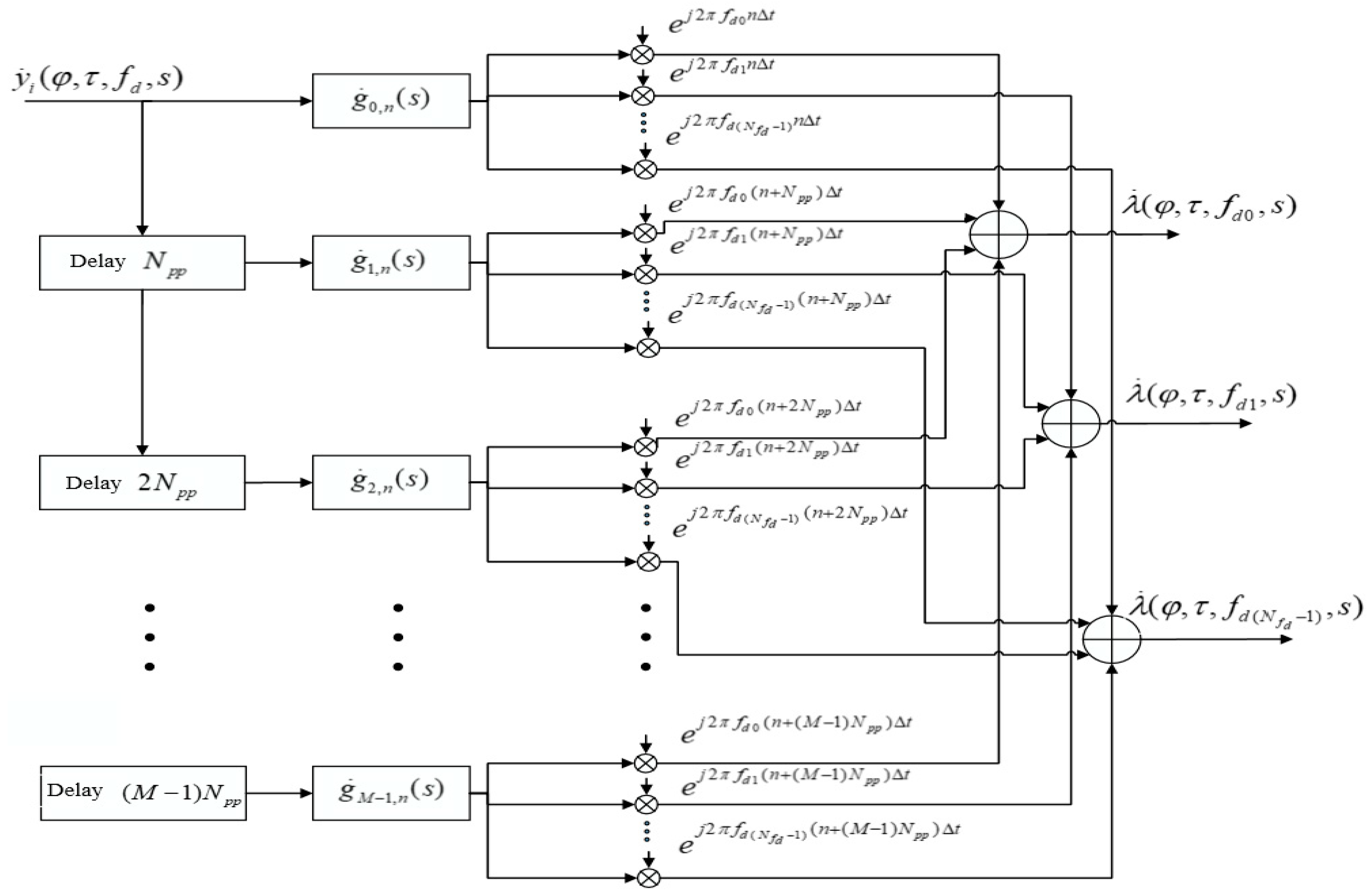
4.1. Estimation Algorithm via Complex Exponents
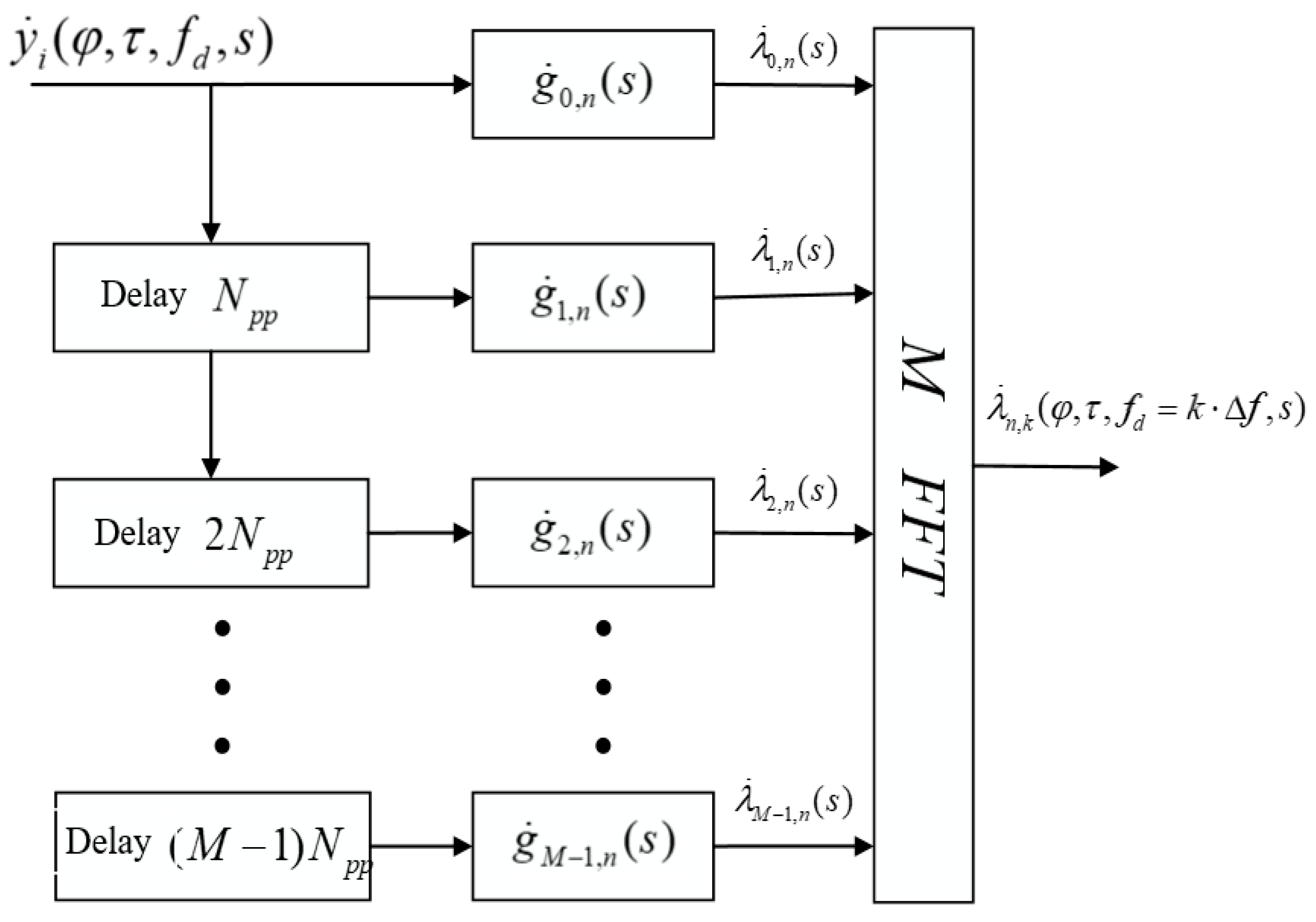
4.2. Algorithm with Doppler Estimation via FFT
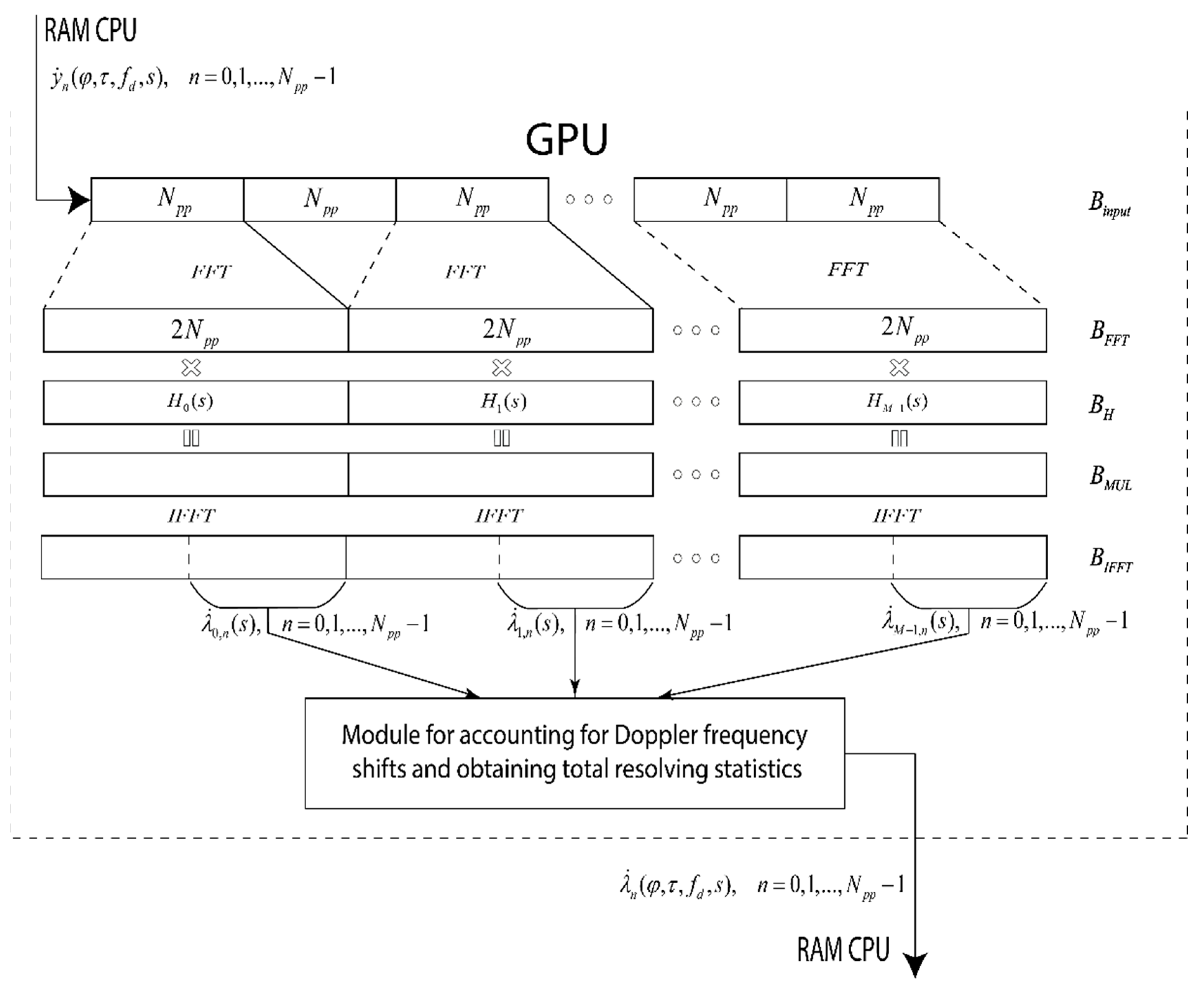
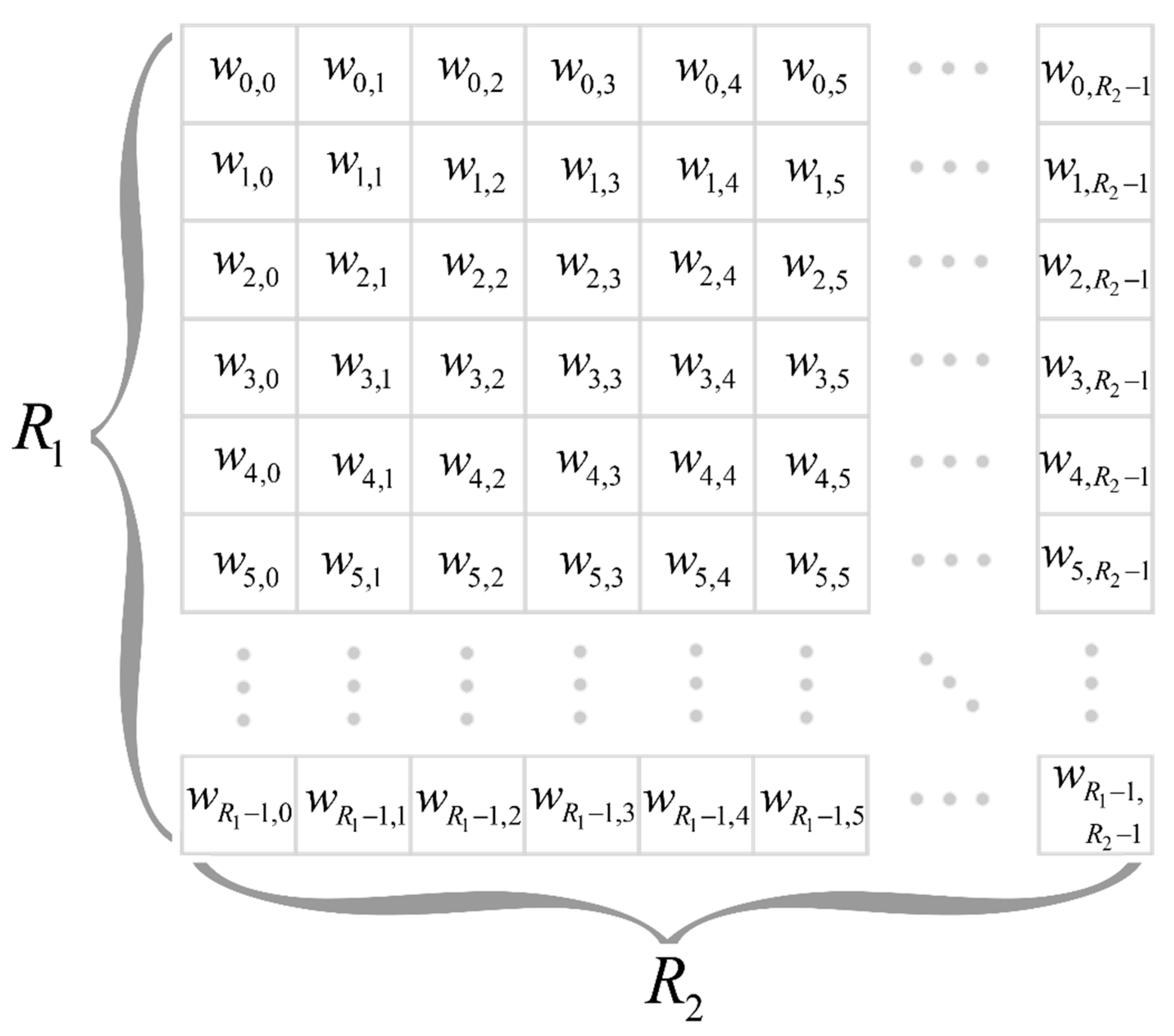
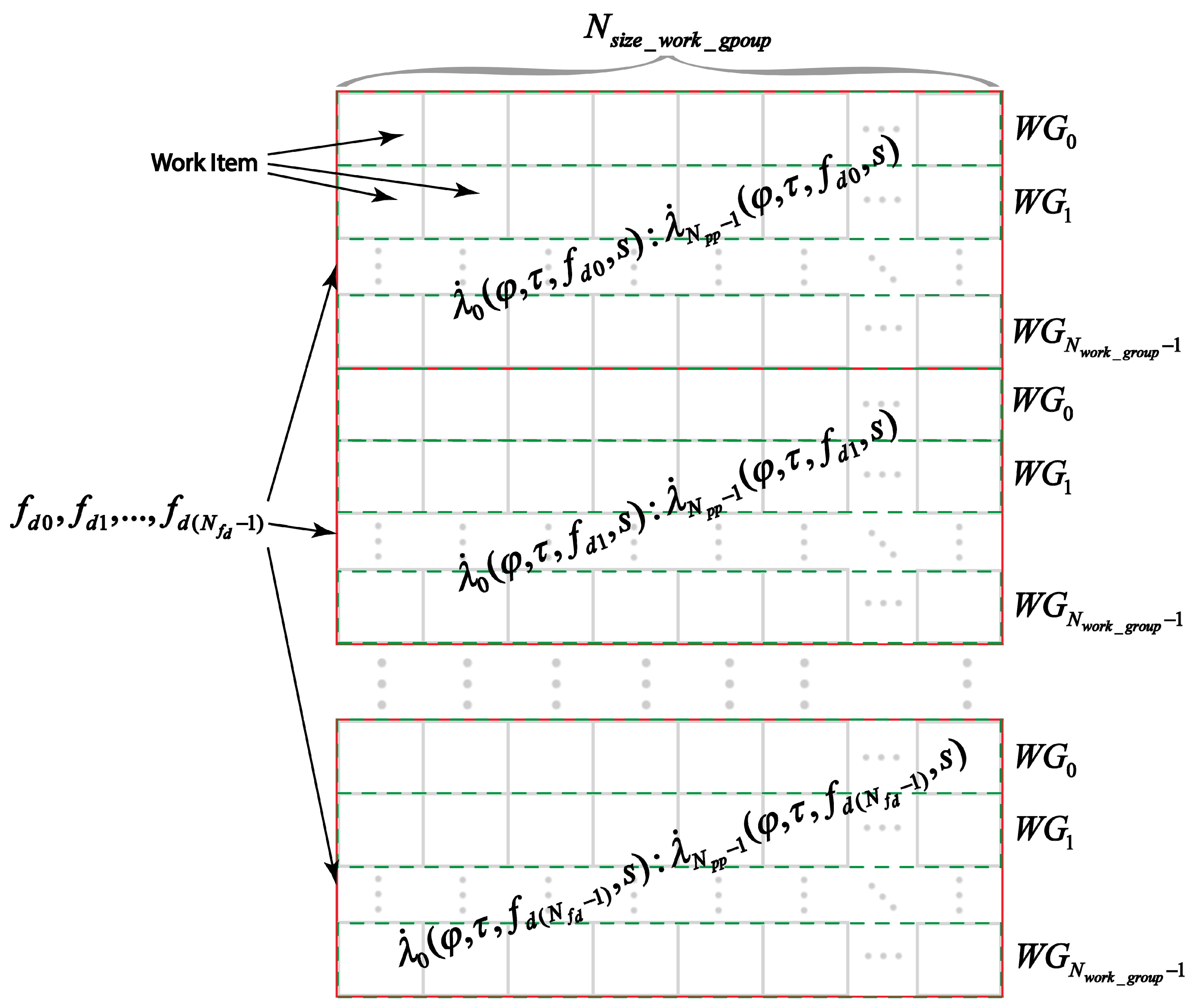
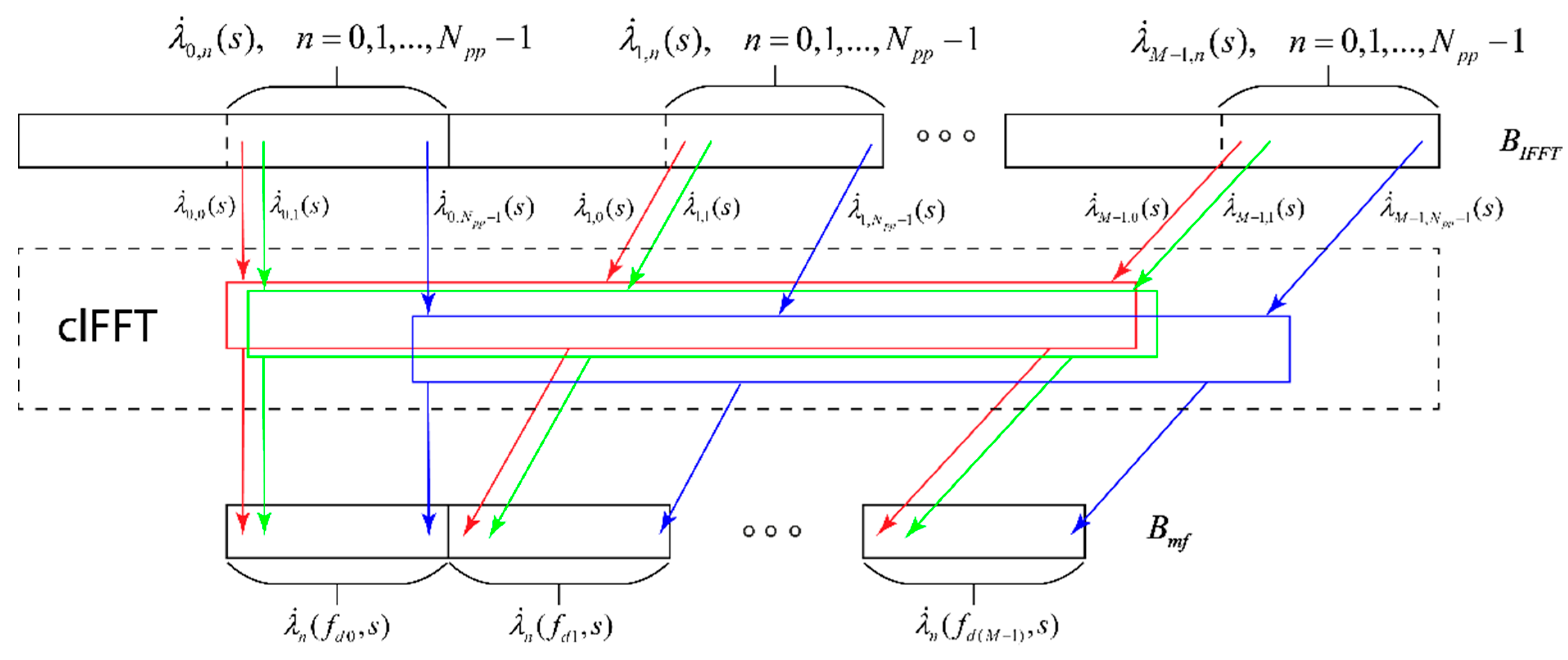
5. GPU Implementation
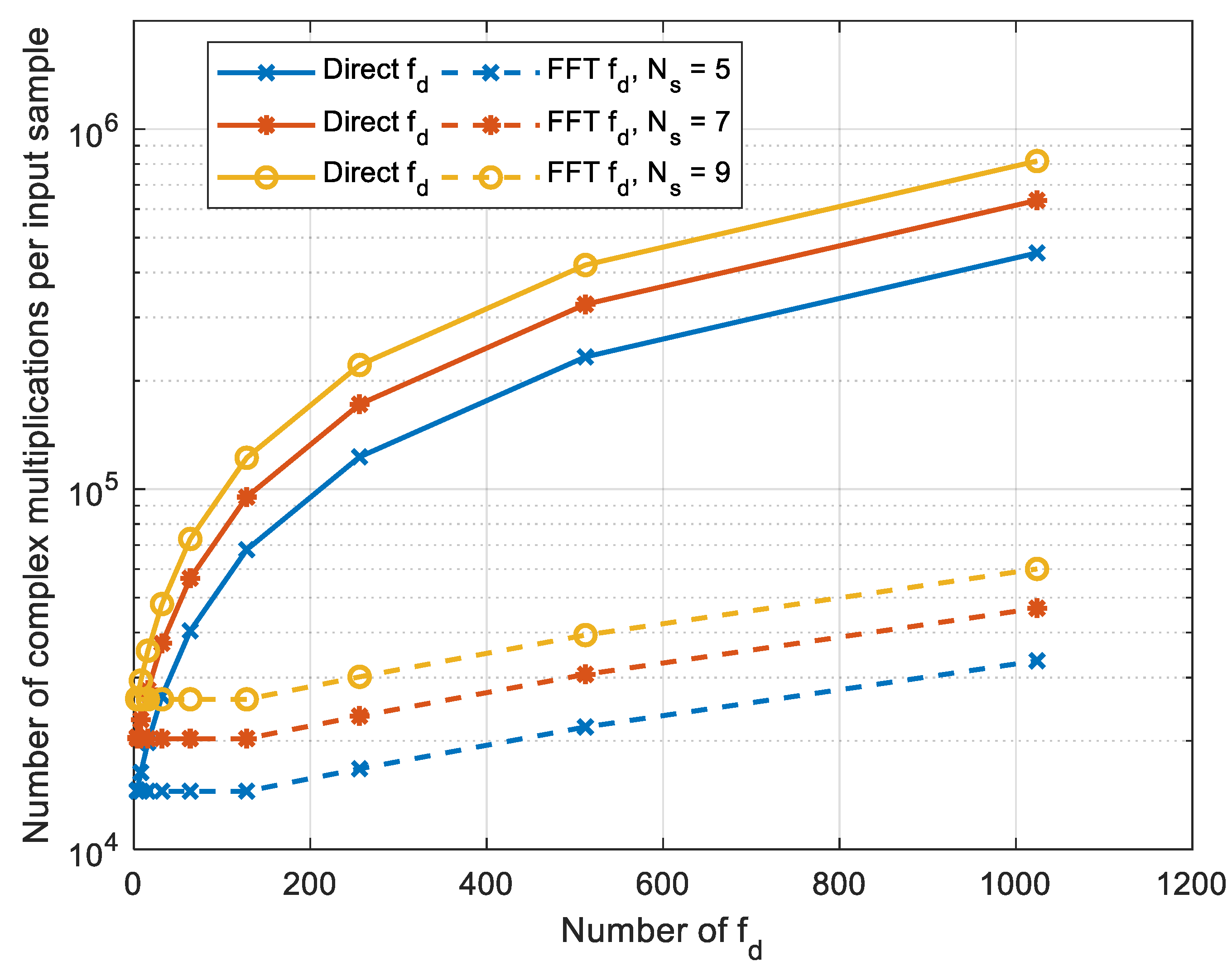
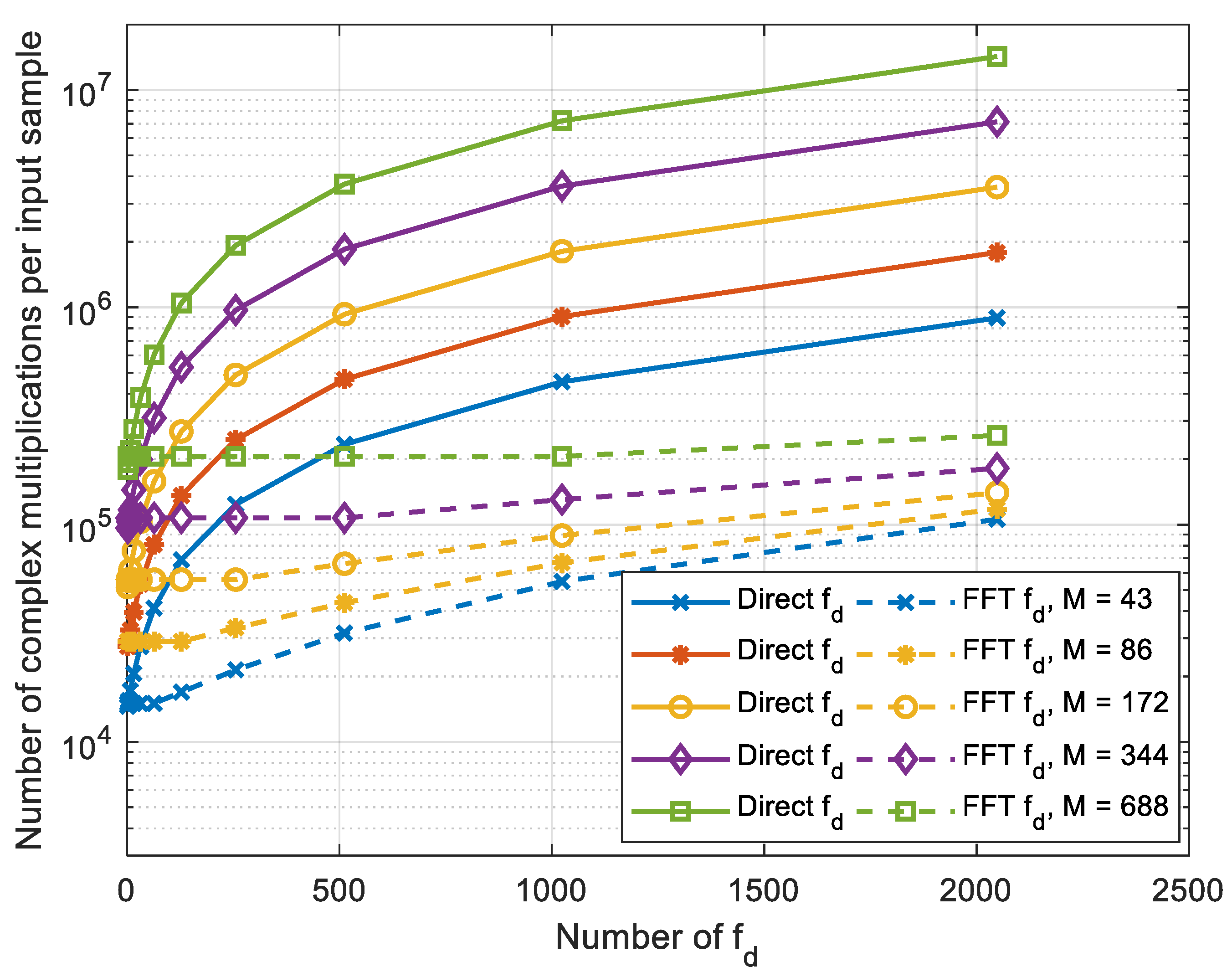
6. Comparison of Algorithms Computational Complexity
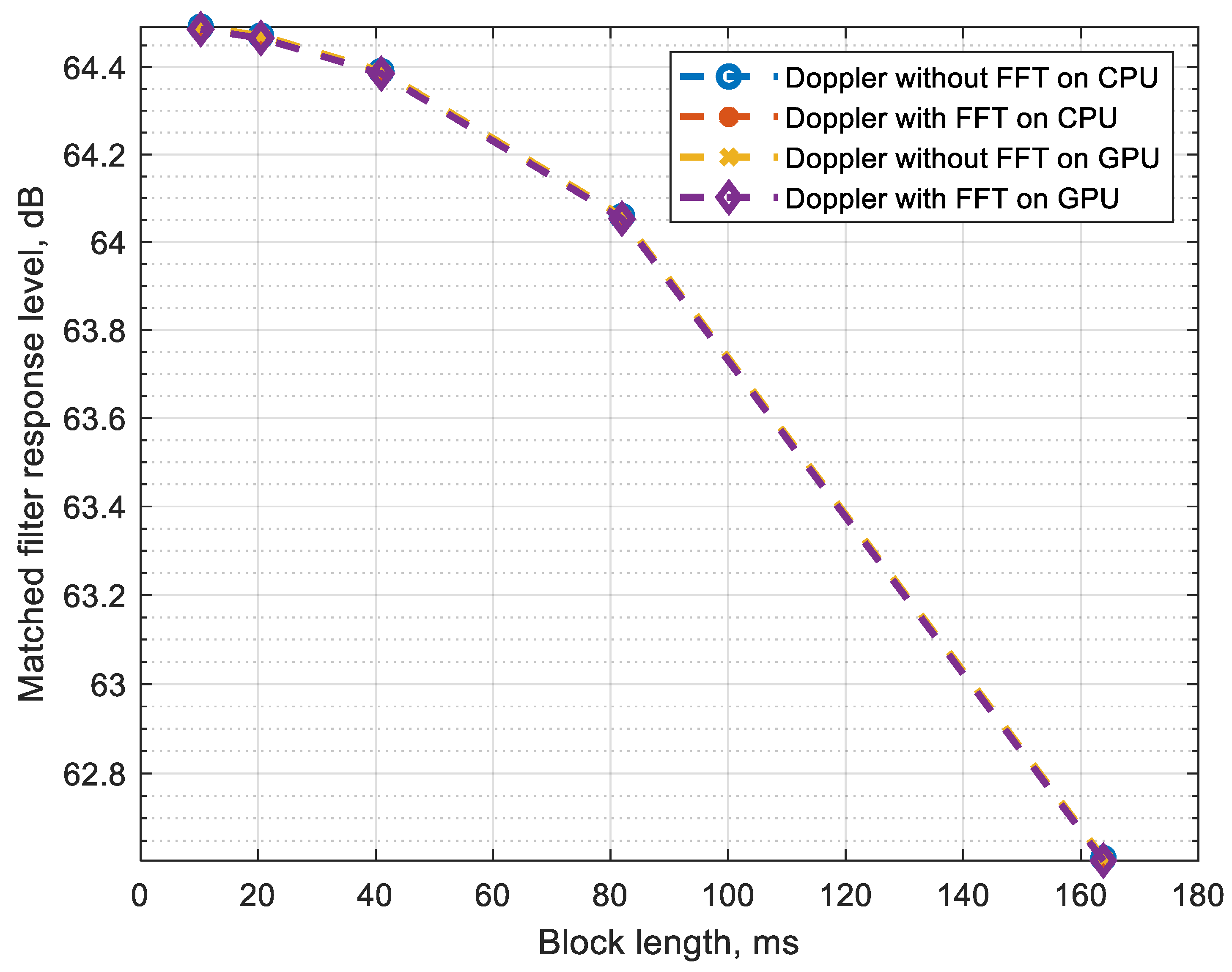
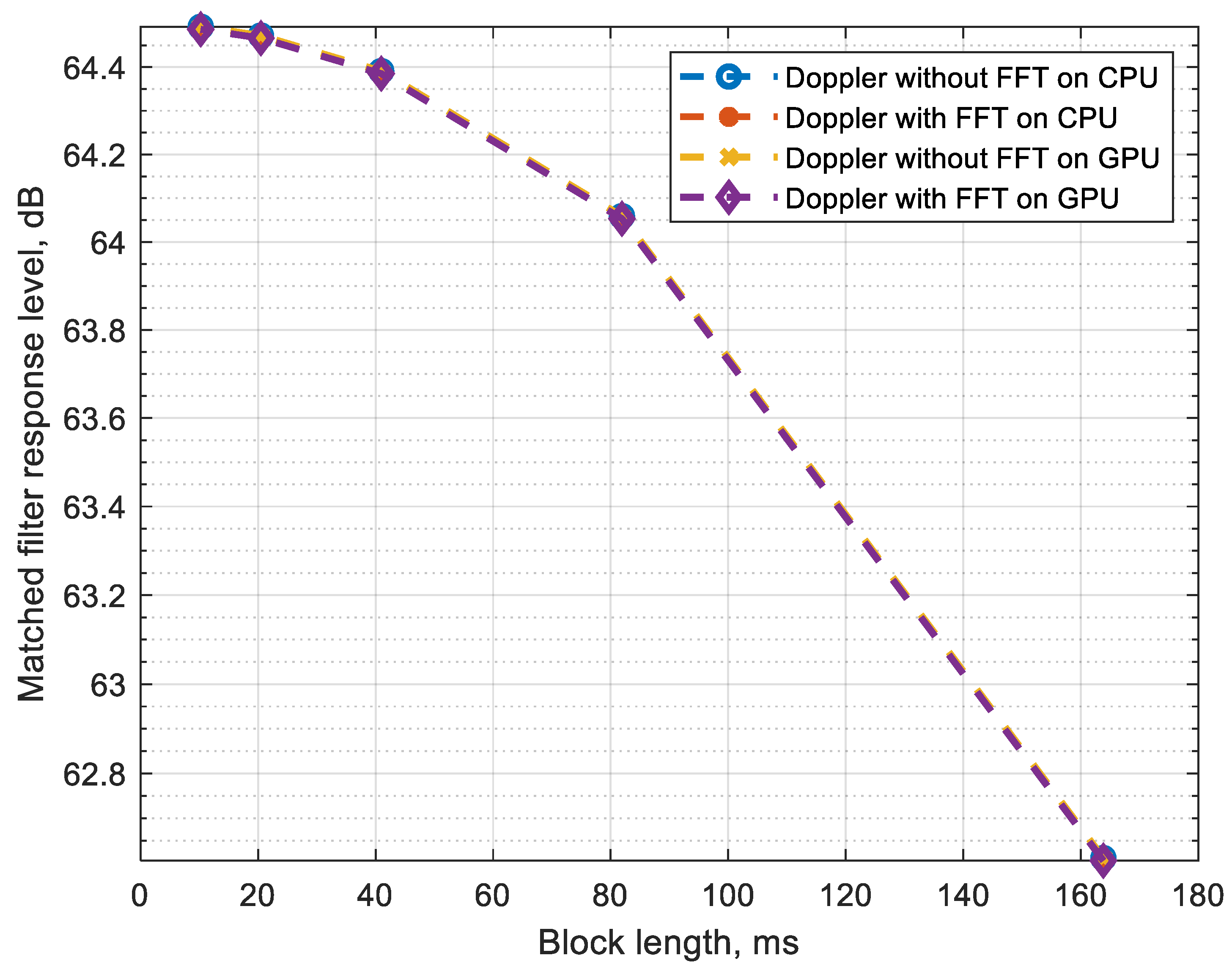
7. Test Results on CPU and GPU
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Jorgenson, M.B.; Johnson, R.W.; Nelson, R.W. An Extension of Wideband HF Capabilities. In Proceedings of the IEEE Military Communications Conference, San Diego, CA, USA, 18–20 November 2013; pp. 1202–1206. [Google Scholar]
- Pijoan, J.L.; Altadill, D.; Torta, J.M.; Alsina-Pagès, R.M.; Marsal, S.; Badia, D. Remote Geophysical Observatory in Antarctica with HF Data Transmission: A Review. Remote Sens. 2014, 6, 7233–7259. [Google Scholar] [CrossRef] [Green Version]
- Kandaurov, N.A. Signal-Code Constructs for Wideband HF Communication. In Proceedings of the 2019 Systems of Signal Synchronization, Generating and Processing in Telecommunications, Yaroslavl, Russia, 1–3 July 2019; p. 5. [Google Scholar] [CrossRef]
- Laraway, S.A.; Loera, J.; Moradi, H.; Farhang-Boroujeny, B. Experimental Comparison of FB-MC-SS and DS-SS in HF Channels. In Proceedings of the MILCOM 2018 IEEE Military Communications Conference (MILCOM), Los Angeles, CA, USA, 29–31 October 2018; pp. 714–719. [Google Scholar] [CrossRef]
- Deumal, M.; Vilella, C.; Socoro, J.; Alsina-Pagès, R.M.; Pijoan, J.L. A DS-SS signaling based system proposal for low SNR HF digital communications. In Proceedings of the 10th International Conference on Ionospheric Radio Systems and Techniques, London, UK, 18–21 July 2006; pp. 128–132. [Google Scholar]
- Laraway, S.A.; Farhang-Boroujeny, B. Performance Analysis of a Multicarrier Spread Spectrum System in Doubly Dispersive Channels with Emphasis on HF Communications. IEEE Open J. Commun. Soc. 2020, 1, 462–476. [Google Scholar] [CrossRef]
- Sun, H.; Yang, G.; Cui, X.; Zhu, P.; Jiang, C. Design of an Ultrawideband Ionosonde. IEEE Geosci. Remote Sens. Lett. 2015, 12, 1042–1045. [Google Scholar] [CrossRef]
- Ivanov, D.V. Methods and Mathematical Models for Study of the Propagation of Decameter Complex Signals and Correction its Dispersion Distortions; MarSTU: Yoshkar-Ola, Russia, 2006. [Google Scholar]
- Male, J.; Porte, J.; Gonzalez, T.; Maso, J.M.; Pijoan, J.L.; Badia, D. Analysis of the Ordinary and Extraordinary Ionospheric Modes for NVIS Digital Communications Channels. Sensors 2021, 21, 2210. [Google Scholar] [CrossRef] [PubMed]
- Adjemov, S.S.; Lobov, E.M.; Kandaurov, N.A.; Lobova, E.O. Methods and algorithms of broadband HF signals dispersion distortion compensation. In Proceedings of the 2019 Systems of Signal Synchronization, Generating and Processing in Telecommunications (SYNCHROINFO), Yaroslavl, Russia, 1–3 July 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Barnes, R.I.; Earl, G.F. A wideband technique for micro-ranging in OTHR. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; pp. 1–6. [Google Scholar] [CrossRef]
- Huang, D.; Liu, E.; Hu, H.; Liu, J. Algorithm for the estimation of ionosphere parameters from ground scatter echoes of SuperDARN. Sci. China Technol. Sci. 2018, 61, 1755–1764. [Google Scholar] [CrossRef]
- Ajemov, S.S.; Lobov, E.M.; Kandaurov, N.A.; Lobova, E.O.; Lipatkin, V.I. Algorithms of Estimating and Compensating the Dispersion Distortions of Wideband Signals in the HF Channel. H&ES Res. 2021, 13, 57–74. [Google Scholar]
- Lipatkin, V.I.; Lobova, E.O.; Kandaurov, N.A. Wideband Signals Dispersion Distortions Optimum Tracking Compensator Based On Digital Filter Banks Using Farrow Filters. In Proceedings of the 2020 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 19–20 March 2020; p. 6. [Google Scholar] [CrossRef]
- Lipatkin, V.I.; Lobova, E.O. Broadband Noise-like Signal Parameters Joint Estimation Quality with Dispersion Distortions in the Ionospheric Channel. In Proceedings of the 2020 Systems of Signal Synchronization, Generating and Processing in Telecommunications, SYNCHROINFO 2020, Svetlogorsk, Russia, 1–3 July 2020; p. 6. [Google Scholar] [CrossRef]
- Lipatkin, V.I.; Lobova, E.O.; Telengator, K.E. The Influence of the Quality of the Estimation of Dispersion Distortions of a Broadband HF Signal on the Noise Immunity of a Radio Link. In Proceedings of the 2021 Systems of Signal Synchronization, Generating and Processing in Telecommunications, SYNCHROINFO 2021, Svetlogorsk, Russia, 30 June–2 July 2021; p. 4. [Google Scholar] [CrossRef]
- Lipatkin, V.I.; Lobov, E.M.; Lobova, E.O.; Kandaurov, N.A. Cramer-Rao Bounds for Wideband Signal Parameters Joint Estimation in Ionospheric Frequency Dispersion Distortion Conditions. In Proceedings of the 2021 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 16–18 March 2021; p. 7. [Google Scholar] [CrossRef]
- Arnold, E.; Rodriguez-Morales, F.; Paden, J.; Leuschen, C.; Keshmiri, S.; Yan, S.; Ewing, M.; Hale, R.; Mahmood, A.; Blevins, A.; et al. HF/VHF Radar Sounding of Ice from Manned and Unmanned Airborne Platforms. Geosciences 2018, 8, 182. [Google Scholar] [CrossRef] [Green Version]
- Davey, S.J.; Fabrizio, G.A.; Rutten, M.G. Multipath-aware detection and tracking in skywave over-the-horizon radar. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WS, USA, 8–12 May 2017; pp. 0636–0640. [Google Scholar] [CrossRef]
- Fabrizio, G.; Zadoyanchuk, A.; Francis, D.; Nguyen, V. Using emitters of opportunity to enhance track geo-registration in HF over-the-horizon radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Tao, S.; Ran, T.; Rong, S.R. A Fast Method for Time Delay, Doppler Shift and Doppler Rate Estimation. In Proceedings of the 2006 CIE International Conference on Radar, Shangai, China, 16–19 October 2006; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, Y.L.; Wu, Y.; Yi, S.C. An Efficient Direct Position Determination Algorithm Combined with Time Delay and Doppler. Circuits Syst. Signal Process 2016, 35, 635–649. [Google Scholar] [CrossRef]
- Deng, L.; Wei, P.; Zhang, Z.; Zhang, H. Doppler Frequency Shift Based Source Localization in Presence of Sensor Location Errors. IEEE Access 2018, 6, 59752–59760. [Google Scholar] [CrossRef]
- Ren, F.; Gao, H.; Yang, L. Distributed Multistatic Sky-Wave Over-The-Horizon Radar Based on the Doppler Frequency for MarineTarget Positioning. Electronics 2021, 10, 1472. [Google Scholar] [CrossRef]
- Warrington, E.M.; Stocker, A.J. Measurements of the Doppler and multipath spread of the HF signals received over a path oriented along the midlatitude trough. Radio Sci. 2003, 38, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Knapp, C.H.; Karter, G.C. The Generalized Correlation Method for Estimation of Time Delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar]
- Stein, S. Algorithms for ambiguity function processing. IEEE Trans. Acoust. Speech Signal Process. 1981, 29, 588–599. [Google Scholar] [CrossRef]
- Tolimieri, R.; Winograd, S. Computing the ambiguity surface. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 1239–1245. [Google Scholar] [CrossRef]
- Zhihai, Z.; Tao, S. Research on Fast Computation of Ambiguity Function. In Proceedings of the 2008 Congress on Image and Signal Processing, Washington, DC, USA, 27–30 May 2008; pp. 188–192. [Google Scholar] [CrossRef]
- Zhang, W.; Tao, R.; Ma, Y. Fast computation of the ambiguity function. In Proceedings of the 7th International Conference on Signal Processing, 2004, Beijing, China, 31 August–4 September 2004; Volume 3, pp. 2124–2127. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, X.; Zou, Y.; Zhang, R. A Low Complexity Algorithm for Time-Frequency Joint Estimation of CAF Based on Numerical Fitting. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Online, 9–11 August 2020; pp. 214–218. [Google Scholar] [CrossRef]
- Ershov, R.A.; Morozov, O.A.; Fidelman, V.R. Time Delay Estimation of Ultra-wideband Signals by Calculation of the Cross-Ambiguity Function. In Wireless Communications, Networking and Applications. Lecture Notes in Electrical Engineering; Zeng, Q.A., Ed.; Springer: New Delhi, India, 2016; Volume 348. [Google Scholar]
- Liu, G.; Yang, W.; Li, P.; Qin, G.; Cai, J.; Wang, Y.; Wang, S.; Yue, N.; Huang, D. MIMO Radar Parallel Simulation System Based on CPU/GPU Architecture. Sensors 2022, 22, 396. [Google Scholar] [CrossRef] [PubMed]
- Kandaurov, N.A.; Lipatkin, V.I.; Varlamov, V.O. Implementing Digital Downconversion on a GPU. In Proceedings of the 2021 Systems of Signal Synchronization, Generating and Processing in Telecommunications, SYNCHROINFO 2021, Svetlogorsk, Russia, 30 June–2 July 2021; p. 8. [Google Scholar] [CrossRef]
- He, Y.; Li, X.; Li, R.; Wang, J.; Jing, X. A Deep-Learning Method for Radar Micro-Doppler Spectrogram Restoration. Sensors 2020, 20, 5007. [Google Scholar] [CrossRef] [PubMed]
- Proakis, J.G. Digital Communications, 4th ed.; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]
- Munshi, A. The OpenCL Specification. Khronos OpenCL Working Group. Version 1.2. Document Revision 19. 2012. Available online: https://www.khronos.org/registry/OpenCL/specs/opencl-1.2.pdf (accessed on 17 April 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm Implementation Type | Block Length 10.24 ms µs | Block Length 20.48 ms µs | Block Length 40.96 ms µs | Block Length 81.92 ms µs | Block Length 163.84 ms µs |
|---|---|---|---|---|---|
| Doppler without FFT on CPU | 251.1 | 124.4 | 62.59 | 31.3 | 15.91 |
| Doppler with FFT on CPU | 17.83 | 9.17 | 5.88 | 3.98 | 2.51 |
| Doppler without FFT on GPU | 7.36 | 4.21 | 2.49 | 1.61 | 1.19 |
| Doppler with FFT on GPU | 3.91 | 2.03 | 1.29 | 0.91 | 0.55 |
| Algorithm Implementation Type | Block Length 10.24 ms | Block Length 20.48 ms | Block Length 40.96 ms | Block Length 81.92 ms | Block Length 163.84 ms |
|---|---|---|---|---|---|
| Doppler without FFT | 34.12 | 29.55 | 25.14 | 19.44 | 13.37 |
| Doppler with FFT | 4.56 | 4.52 | 4.56 | 4.37 | 4.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lipatkin, V.I.; Lobov, E.M.; Kandaurov, N.A. Computationally Efficient Implementation of Joint Detection and Parameters Estimation of Signals with Dispersive Distortions on a GPU. Sensors 2022, 22, 3105. https://doi.org/10.3390/s22093105
Lipatkin VI, Lobov EM, Kandaurov NA. Computationally Efficient Implementation of Joint Detection and Parameters Estimation of Signals with Dispersive Distortions on a GPU. Sensors. 2022; 22(9):3105. https://doi.org/10.3390/s22093105
Chicago/Turabian StyleLipatkin, Vladislav I., Evgeniy M. Lobov, and Nikolai A. Kandaurov. 2022. "Computationally Efficient Implementation of Joint Detection and Parameters Estimation of Signals with Dispersive Distortions on a GPU" Sensors 22, no. 9: 3105. https://doi.org/10.3390/s22093105
APA StyleLipatkin, V. I., Lobov, E. M., & Kandaurov, N. A. (2022). Computationally Efficient Implementation of Joint Detection and Parameters Estimation of Signals with Dispersive Distortions on a GPU. Sensors, 22(9), 3105. https://doi.org/10.3390/s22093105