
A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives



 ,
,  and
and
Abstract
:1. Introduction
- Edge computing.
- Vehicle to Everything communication (V2X).
- Beamforming.
- Multi-array antenna.
- Investigating the algorithms for RF-based localisation that are highly likely to be used for challenging UGV and UAV applications.
- Reviewing the existing works considered using RF specifically for UAVs and UGVs positioning.
- Discussing the new potential that 5G NR will provide to cope with the current issues in UAVs and UGVs localisation problem.
- Discussing the challenges for ground and aerial robots localisation and its integration with 5G NR.
2. RF Features
2.1. Received Signal Strength
- : power at the reference distance from the transmitter (usually 1m).
- : received power at distance d from the transmitter.
- : shadowing effect( mostly considered as Gaussian).
- : Path loss exponent (PLE), the rate at which power decrease over distance.
- b: bias error.
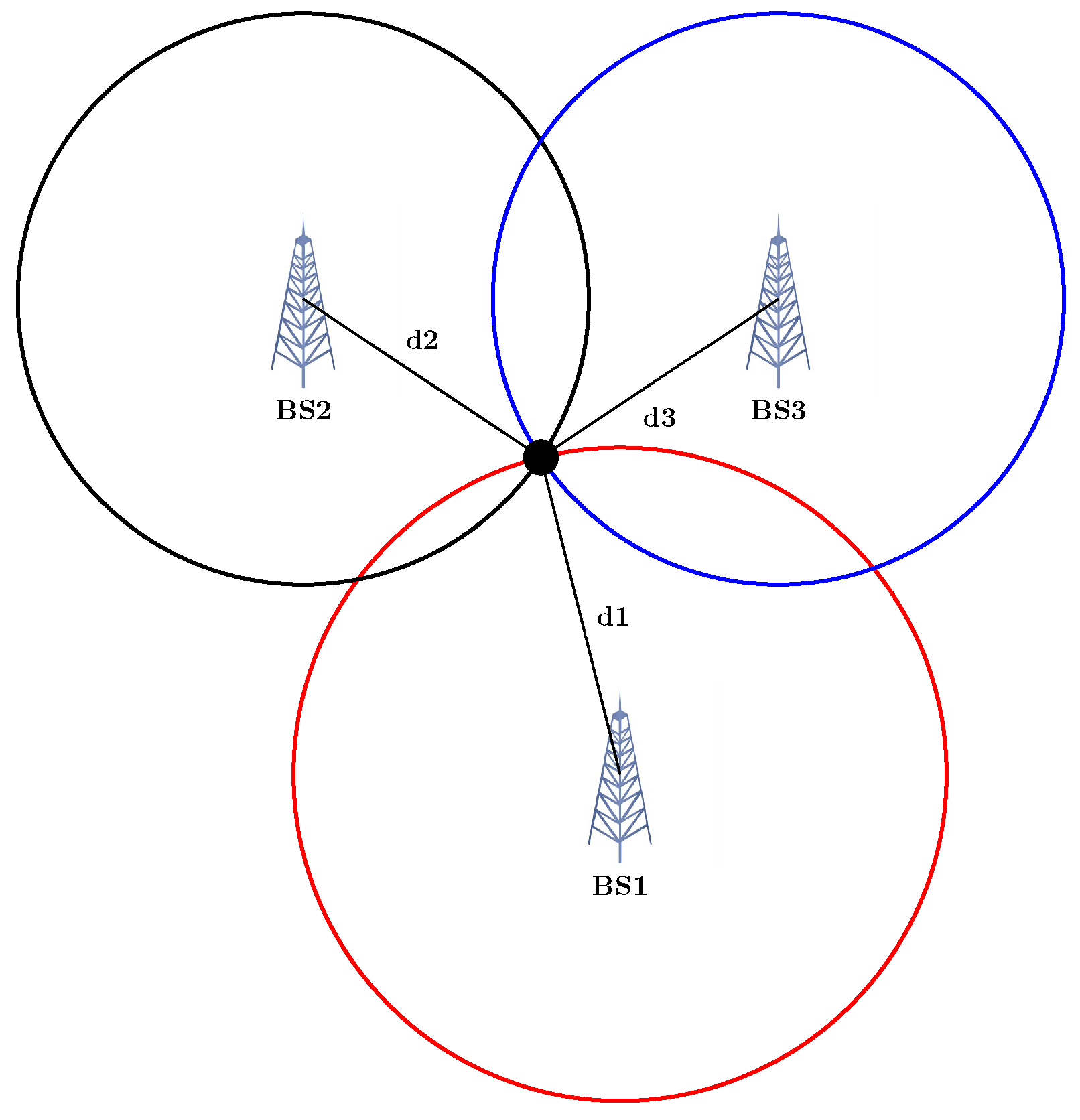
2.2. Time of Arrival
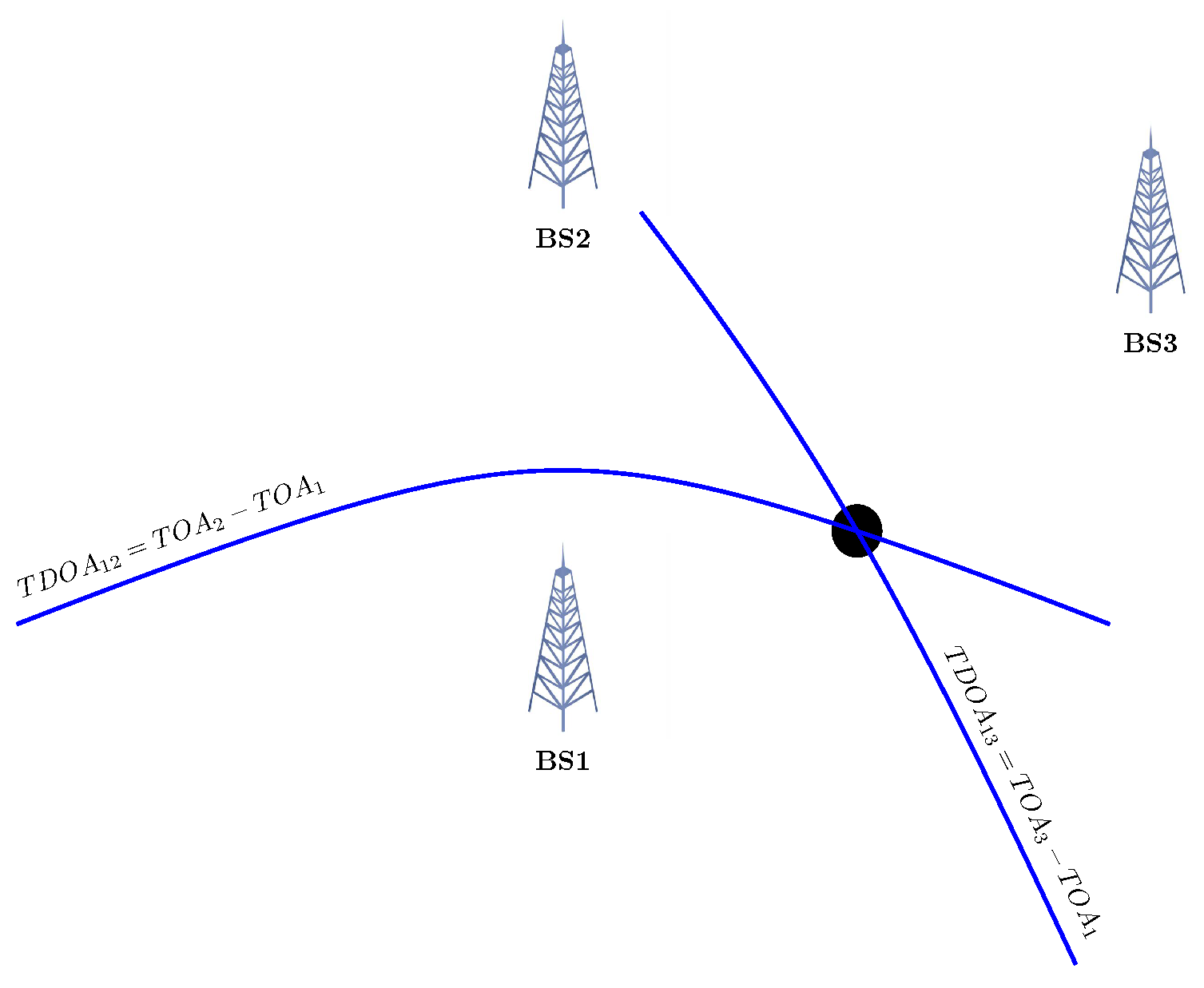
2.3. Time Difference of Arrival
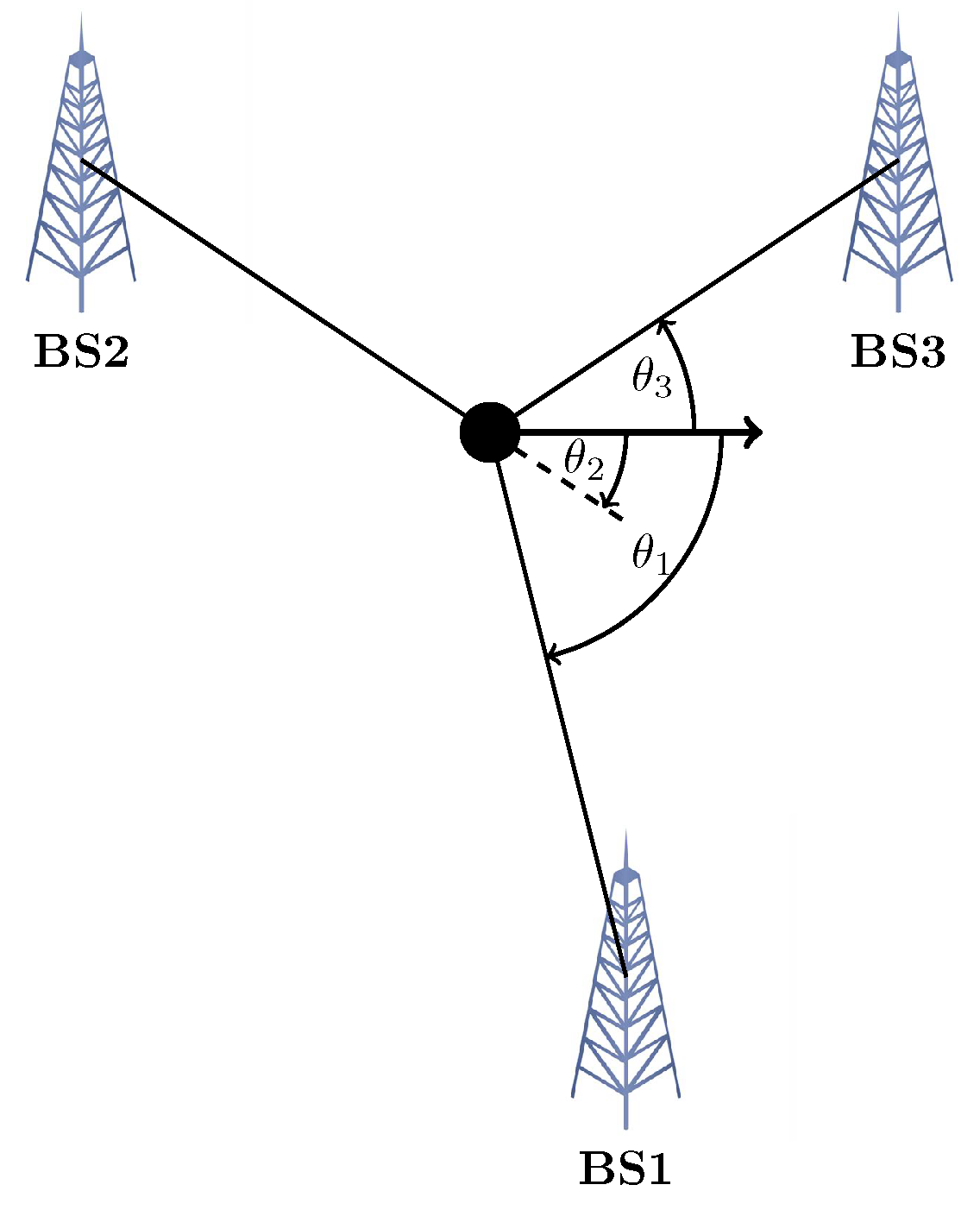
2.4. Angle of Arrival
2.5. Channel System Information
3. Overview of RF-Based Localisation Techniques
- Range-based techniques: Localisation is achieved by inferring the distance or angle of the target from a node based on the measurements. Time Of Arrival (TOA), Time Difference Of Arrival (TDOA), and Received Signal Strength (RSS) provide ranges, while Angle Of Arrival (AOA) provides bearings measurements. In a sensor framework, two or several of these methods can be combined, which might result in a better outcome. In the next stage, the extracted ranges or bearings are used to estimate the location, taking advantage of various mathematical tools such as Maximum Likelihood (ML), the Least Squares (LS) approach, the Bayesian model, or different types of filters such as the Kalman filter (KF), extended Kalman (EKF), Unscented Kalman filter (UKF), and Particle filter (PF). In the next section, we will explain the methods used for range-based localisation.
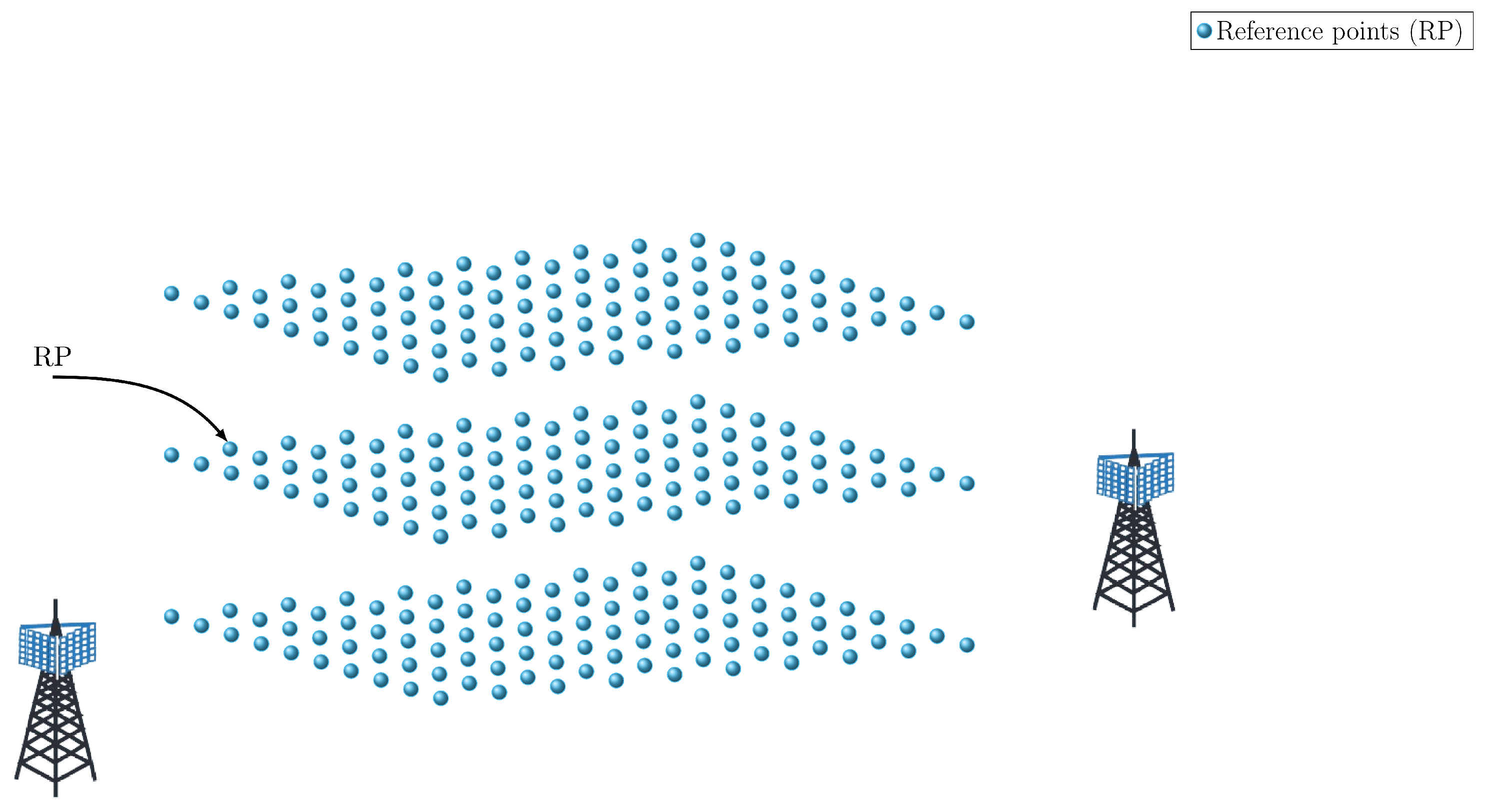
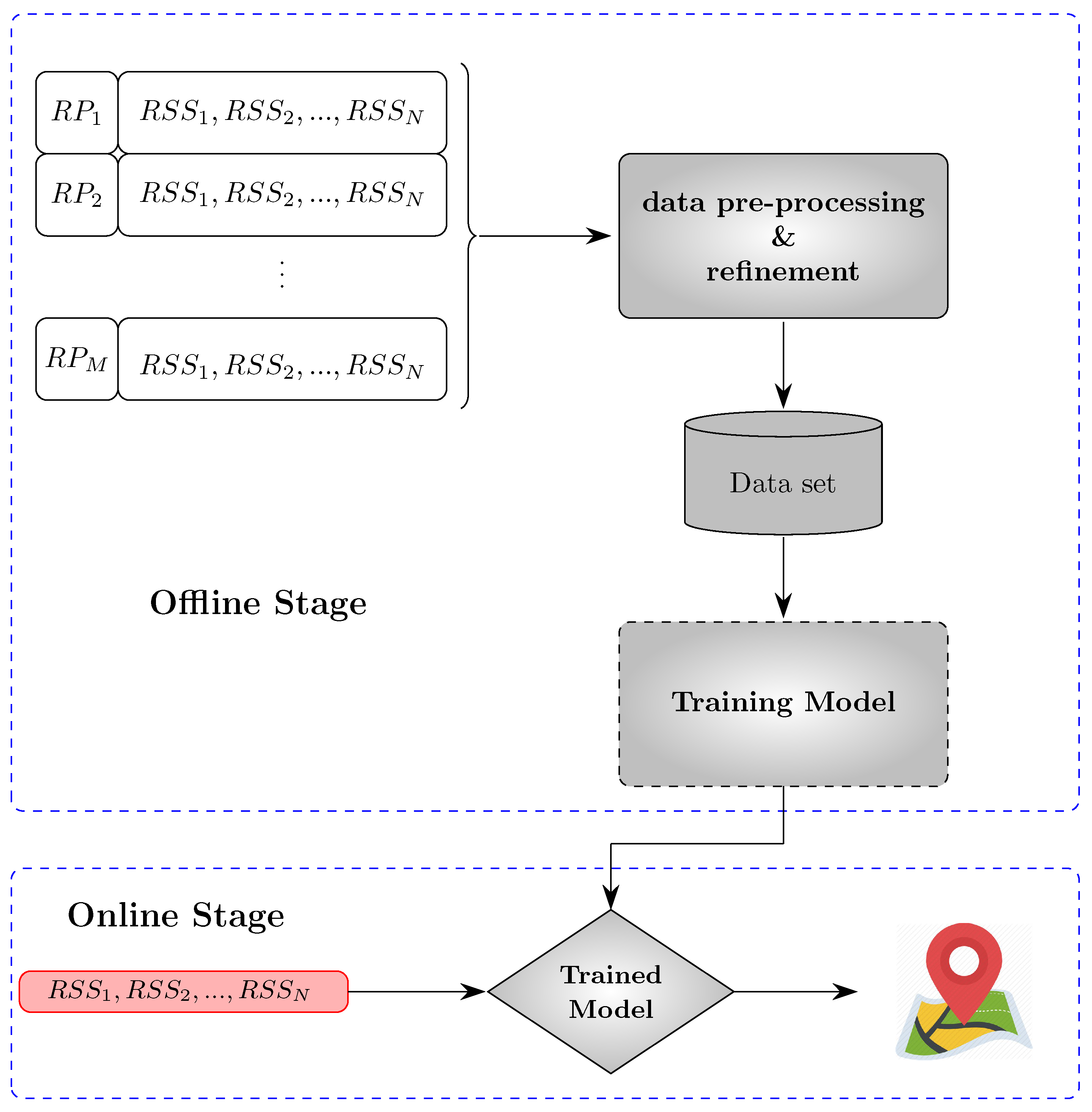
- Range-free or Fingerprinting: Instead of calculating the distance or direction, the environmental survey is performed to obtain fingerprints or features recorded on a database, such as the location-RSS pair’s value, and then in online mode, for every new measurement, the localisation is performed by finding the best match in the data set. More generally, this method consists of mapping and matching. Compared to the range-based approach, fingerprinting techniques are more accurate and demanding to implement, requiring a pretest to create an extensive database. In addition, fingerprinting methods differ in generating and updating the data set and the matching process. Nevertheless, fingerprinting is widely used for CSI and RSS-based localisation.
4. Range-Based Algorithms
4.1. Multi-Lateration/Triangulation
4.2. Min–Max
4.3. Multidimensional Scaling (MDS)
4.4. Least Squares (LS)
4.5. Maximum Likelihood (ML)
4.6. Bayesian Inference Method
4.7. Bayesian Filters
5. Fingerprinting
5.1. Offline Step
5.2. Online Phase
5.2.1. Classical Machine Learning
5.2.2. Deep Learning
6. Other Taxonomies
6.1. Distributed vs. Centralised
6.2. Cooperative vs. Non-Cooperative
6.3. Anchor-Based vs. Anchor-Free
6.4. Static vs. Mobile
6.5. Technologies
6.6. 2D vs. 3D
6.7. Performance Parameters
7. RF-Based Localisation for Aerial and Ground Robots
- UGVs, and especially UAVs, are highly manoeuvrable, with high speed. The existing state of the art for WSN localisation focuses on fixed targets and cannot address the rapid changes in the target location and the real-time implementation.
- The mobility of vehicles calls for a combination of other sensors, such as IMU and Images. The combination of the sensor data, especially images and RF, has not been studied in localisation.
- The majority of current works in WSN often consider just 2D cases, while vertical estimation is of great importance in UAV localisation.
- The accuracy and robustness in demand in UAVs and UGVs localisation applications are more critical. Usually, very accurate estimation is necessary, while in WSN, rather rough estimation suffices. This, for instance, rules out relying merely on RSS, which is the case for most of the existing state-of-the-art RF localisation.
- Use of limited technologies is the other drawback. For robot applications, UWB is used most. It is limited to indoors and is suitable for short range. New Technologies, especially 5G NR, have rarely been considered so far. In 5G, RSS would not be the most relevant feature, so there would be a shift to the use of this technology’s new potentials and capabilities.
- Limited to specific technologies and sensor data: Most papers use RSS due to its easy-to-use hardware. In that case, acceptable accuracy is achieved by using UWB, which is limited for indoor use with short range. TOA-based localisation is also achieved mostly by taking advantage of UWB. Moreover, many possibilities are missing in the literature, such as the integration of images, and LIDAR with RFs.
- Limited Accuracy: accuracy is one of the main concerns in UAVs and UGVs localisation. Only relying on simple algorithms and sensor data, like RSS, might not be an appropriate solution, especially with the upcoming technologies, 5G and beyond. As we discuss later in our paper, CSI information would provide a huge amount of useful data. However, the real-time implementation and its fusion with conventional sensor data is the real concern that is not addressed. Edge computing and off-loading as the most promising solutions are rarely investigated.
8. 5G Potentials and Promises for Robot Applications
- Wide area coverage.
- MIMO technology.
- High carrier frequency.
- High bandwidth.
- Vehicle-to-Everything (V2X).
- Low latency.
- High throughput.
8.1. Wide Area Coverage and Inexpensive Localisation Systems
8.2. RF Measurements with More Resolution
8.3. Vehicle-to-Everything Standard
8.4. Low Latency
8.5. High Throughput
8.6. Localisation Based on 5G
9. Future Research Directions and Challenges
9.1. Fingerprinting and Deep Learning Applied to CSI
9.2. Fusion of RF with Other Sensor Data
9.3. Combination of Multiple Estimators
9.4. Cooperative Localisation
9.5. Orientation Estimation
9.6. Experimental Setup and Realistic Simulation
9.7. Off-Loading
9.8. Simultaneous Localisation and Mapping
9.9. Vertical Localisation Accuracy
9.10. Safety
10. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Amponis, G.; Lagkas, T.; Zevgara, M.; Katsikas, G.; Xirofotos, T.; Moscholios, I.; Sarigiannidis, P. Drones in B5G/6G Networks as Flying Base Stations. Drones 2022, 6, 39. [Google Scholar] [CrossRef]
- Azmat, M.; Kummer, S. Potential applications of unmanned ground and aerial vehicles to mitigate challenges of transport and logistics-related critical success factors in the humanitarian supply chain. Asian J. Sustain. Soc. Responsib. 2020, 5, 3. [Google Scholar] [CrossRef] [Green Version]
- Bhat, S.J.; Santhosh, K. Is localization of wireless sensor networks in irregular fields a challenge? Wireless Pers. Commun. 2020, 114, 2017–2042. [Google Scholar] [CrossRef]
- Hadir, A.; Zine-Dine, K.; Bakhouya, M.; El Kafi, J.; El Ouadghiri, D. Performance evaluation of DV-Hop localization algorithm for geographical routing in wireless sensor networks. Procedia Comput. Sci. 2017, 113, 261–266. [Google Scholar] [CrossRef]
- Chuang, P.J.; Jiang, Y.J. Effective neural network-based node localisation scheme for wireless sensor networks. IET Wirel. Sensor Syst. 2014, 4, 97–103. [Google Scholar] [CrossRef]
- Kuriakose, J.; Joshi, S.; George, V. Localization in wireless sensor networks: A survey. arXiv 2014, arXiv:1410.8713. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K. A Survey of Indoor Localization Systems and Technologies. arXiv 2019, arXiv:1709.01015. [Google Scholar] [CrossRef] [Green Version]
- Maghdid, S.M. A Comprehensive Review of Indoor/Outdoor Localization Solutions in IoT era: Research Challenges and Future Perspectives. TechRxiv 2021. [Google Scholar] [CrossRef]
- Yang, B.; Yang, E. A survey on radio frequency based precise localisation technology for UAV in GPS-denied environment. J. Intell. Robot. Syst. 2021, 103, 38. [Google Scholar] [CrossRef]
- Chowdhury, T.J.; Elkin, C.; Devabhaktuni, V.; Rawat, D.B.; Oluoch, J. Advances on localization techniques for wireless sensor networks: A survey. Comput. Netw. 2016, 110, 284–305. [Google Scholar] [CrossRef]
- Khelifi, F.; Bradai, A.; Benslimane, A.; Rawat, P.; Atri, M. A Survey of Localization Systems in Internet of Things. Mob. Netw. Appl. 2019, 24, 761–785. [Google Scholar] [CrossRef]
- Tabassum, N. Localization Techniques in Wireless Sensor Networks: A Comprehensive Survey. UGC Care J. 2020, 43, 8. [Google Scholar]
- Kumari, J.; Kumar, P.; Singh, S.K. Localization in three-dimensional wireless sensor networks: A survey. J. Supercomput. 2019, 75, 5040–5083. [Google Scholar] [CrossRef]
- Paul, A.K.; Sato, T. Localization in wireless sensor networks: A survey on algorithms, measurement techniques, applications and challenges. J. Sens. Actuator Netw. 2017, 6, 24. [Google Scholar] [CrossRef] [Green Version]
- Dwivedi, S.; Shreevastav, R.; Munier, F.; Nygren, J.; Siomina, I.; Lyazidi, Y.; Shrestha, D.; Lindmark, G.; Ernström, P.; Stare, E.; et al. Positioning in 5G networks. arXiv 2021, arXiv:2102.03361. [Google Scholar] [CrossRef]
- Shakshuki, E.; Elkhail, A.A.; Nemer, I.; Adam, M.; Sheltami, T. Comparative Study on Range Free Localization Algorithms. Procedia Comput. Sci. 2019, 151, 501–510. [Google Scholar] [CrossRef]
- Pérez, M.C.; Gualda, D.; de Vicente, J.; Villadangos, J.M.; Ureña, J. Review of UAV positioning in indoor environments and new proposal based on US measurements. In CEUR Workshop Proceedings; CEUR: Ljubljana, Slovenia, 2019; p. 8. [Google Scholar]
- Tian, Y.; Tang, Z.; Yu, Y. Third-Order Channel Propagation Model-Based Indoor Adaptive Localization Algorithm for Wireless Sensor Networks. IEEE Antennas Wirel. Propag. Lett. 2013, 12, 1578–1581. [Google Scholar] [CrossRef]
- Martinez-Sala, A.; Molina-Garcia-Pardo, J.M.; Egea-Ldpez, E.; Vales-Alonso, J.; Juan-Llacer, L.; Garcia-Haro, J. An accurate radio channel model for wireless sensor networks simulation. J. Commun. Netw. 2005, 7, 401–407. [Google Scholar] [CrossRef] [Green Version]
- Lee, B.H.; Ham, D.; Choi, J.; Kim, S.C.; Kim, Y.H. Genetic Algorithm for Path Loss Model Selection in Signal Strength Based Indoor Localization. IEEE Sensors J. 2021, 21, 24285–24296. [Google Scholar] [CrossRef]
- Lin, T.H.; Ng, I.H.; Lau, S.Y.; Chen, K.M.; Huang, P. A microscopic examination of an RSSI-signature-Based indoor localization system. In Proceedings of the 5th Workshop on Embedded Networked Sensors (HotEmNets’08), Charlottesville, VA, USA, 2–3 June 2008; pp. 2–6. [Google Scholar]
- Le, H.M.; Rossi, J.P.; Slock, D. A Geometric Interpretation of Trilateration for RSS-based Localization. In Proceedings of the 2020 28th European Signal Processing Conference (EUSIPCO), Amsterdam, The Netherlands, 18–21 January 2021; pp. 1797–1801. [Google Scholar]
- Norrdine, A. An algebraic solution to the multilateration problem. In Proceedings of the 15th International Conference on Indoor Positioning and Indoor Navigation, Sydney, Australia, 13–15 November 2012; Volume 1315. [Google Scholar]
- Booranawong, A.; Sengchuai, K.; Buranapanichkit, D.; Jindapetch, N.; Saito, H. RSSI-Based Indoor Localization Using Multi-Lateration With Zone Selection and Virtual Position-Based Compensation Methods. IEEE Access 2021, 9, 46223–46239. [Google Scholar] [CrossRef]
- Janssen, T.; Berkvens, R.; Weyn, M. Comparing machine learning algorithms for RSS-based localization in LPWAN. In International Conference on P2P, Parallel, Grid, Cloud and Internet Computing; Springer: Berlin/Heidelberg, Germany, 2019; pp. 726–735. [Google Scholar]
- Yang, K.; Liang, Z.; Liu, R.; Li, W. RSS-Based Indoor Localization Using Min-Max Algorithm With Area Partition Strategy. IEEE Access 2021, 9, 125561–125568. [Google Scholar] [CrossRef]
- Monta, S.; Promwong, S.; Kingsakda, V. Evaluation of ultra wideband indoor localization with trilateration and min-max techniques. In Proceedings of the 2016 13th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Chiang Mai, Thailand, 28 June–1 July 2016; pp. 1–4. [Google Scholar]
- Xie, S.; Hu, Y.; Wang, Y. An improved E-Min-Max localization algorithm in wireless sensor networks. In Proceedings of the 2014 IEEE International Conference on Consumer Electronics-China, Shenzhen, China, 9–13 April 2014; pp. 1–4. [Google Scholar]
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Budapest, Hungary, 26–28 August 2009; pp. 9–14. [Google Scholar] [CrossRef]
- Saeed, N.; Nam, H.; Al-Naffouri, T.Y.; Alouini, M.S. A State-of-the-Art Survey on Multidimensional Scaling-Based Localization Techniques. IEEE Commun. Surv. Tutorials 2019, 21, 3565–3583. [Google Scholar] [CrossRef] [Green Version]
- Zhai, H.; Zhang, Y. A recursive weighted least squares optimization algorithm based on RSS in wireless sensor networks. Internet Technol. Lett. 2021, 4, e313. [Google Scholar] [CrossRef]
- Kang, S.; Kim, T.; Chung, W. Hybrid RSS/AOA Localization using Approximated Weighted Least Square in Wireless Sensor Networks. Sensors 2020, 20, 1159. [Google Scholar] [CrossRef] [Green Version]
- Li, X. RSS-based location estimation with unknown pathloss model. IEEE Trans. Wirel. Commun. 2006, 5, 3626–3633. [Google Scholar] [CrossRef]
- Sun, Y.; Yang, S.; Wang, G.; Chen, H. Robust RSS-Based Source Localization With Unknown Model Parameters in Mixed LOS/NLOS Environments. IEEE Trans. Veh. Technol. 2021, 70, 3926–3931. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, H.; Lu, T.; Gulliver, T.A. Cooperative RSS-Based Localization in Wireless Sensor Networks Using Relative Error Estimation and Semidefinite Programming. IEEE Trans. Veh. Technol. 2019, 68, 483–497. [Google Scholar] [CrossRef]
- Shi, J.; Wang, G.; Jin, L. Least Squared Relative Error Estimator for RSS Based Localization With Unknown Transmit Power. IEEE Signal Process. Lett. 2020, 27, 1165–1169. [Google Scholar] [CrossRef]
- Zemek, R.; Hara, S.; Yanagihara, K.; Kitayama, K.I. A Joint Estimation of Target Location and Channel Model Parameters in an IEEE 802.15.4-based Wireless Sensor Network. In Proceedings of the 2007 IEEE 18th International Symposium on Personal, Indoor and Mobile Radio Communications, Athens, Greece, 3–7 September 2007; pp. 1–5. [Google Scholar] [CrossRef]
- Coluccia, A.; Ricciato, F. On ML estimation for automatic RSS-based indoor localization. In Proceedings of the IEEE 5th International Symposium on Wireless Pervasive Computing 2010, Modena, Italy, 5–7 May 2010; pp. 495–502. [Google Scholar] [CrossRef]
- Mei, X.; Wu, H.; Xian, J.; Chen, B. RSS-Based Byzantine Fault-Tolerant Localization Algorithm Under NLOS Environment. IEEE Commun. Lett. 2021, 25, 474–478. [Google Scholar] [CrossRef]
- Jiang, N.; Zhang, N. Expectation Maximization-Based Target Localization From Range Measurements in Multiplicative Noise Environments. IEEE Commun. Lett. 2021, 25, 1524–1528. [Google Scholar] [CrossRef]
- Phoong, S.Y.; Ismail, M.T. A comparison between Bayesian and maximum likelihood estimations in estimating finite mixture model for financial data. Sains Malays. 2015, 44, 1033–1039. [Google Scholar] [CrossRef]
- Jin, D.; Yin, F.; Fritsche, C.; Gustafsson, F.; Zoubir, A.M. Bayesian cooperative localization using received signal strength with unknown path loss exponent: Message passing approaches. IEEE Trans. Signal Process. 2020, 68, 1120–1135. [Google Scholar] [CrossRef] [Green Version]
- Pearl, J. Probabilistic Reasoning in Intelligent Systems: Networks of Plausible Inference; Morgan Kaufmann: Burlington, MA, USA, 1988. [Google Scholar]
- Benini, A.; Mancini, A.; Longhi, S. An IMU/UWB/Vision-based Extended Kalman Filter for Mini-UAV Localization in Indoor Environment using 802.15.4a Wireless Sensor Network. J. Intell. Robot. Syst. 2013, 70, 461–476. [Google Scholar] [CrossRef]
- Wu, B.F.; Jen, C.L. Particle-Filter-Based Radio Localization for Mobile Robots in the Environments with Low-Density WLAN APs. IEEE Trans. Ind. Electron. 2014, 61, 6860–6870. [Google Scholar] [CrossRef]
- Yin, H.; Xia, W.; Zhang, Y.; Shen, L. UWB-based indoor high precision localization system with robust unscented Kalman filter. In Proceedings of the 2016 IEEE International Conference on Communication Systems (ICCS), Shenzhen, China, 14–16 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Wan, E.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AL, Canada, 4 October 2000; pp. 153–158. [Google Scholar] [CrossRef]
- Schmitz, J.; Schröder, F.; Mathar, R. TDOA fingerprinting for localization in non-line-of-sight and multipath environments. In Proceedings of the 2015 International Symposium on Antennas and Propagation (ISAP), Hobart, TAS, Australia, 9–12 November 2015; pp. 1–4. [Google Scholar]
- Tan, J.; Zhao, H. UAV Localization with Multipath Fingerprints and Machine Learning in Urban NLOS Scenario. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 1494–1499. [Google Scholar] [CrossRef]
- Yu, L.; Laaraiedh, M.; Avrillon, S.; Uguen, B. Fingerprinting localization based on neural networks and ultra-wideband signals. In Proceedings of the 2011 IEEE International Symposium on Signal Processing and Information Technology (ISSPIT), Bilbao, Spain, 14–17 December 2011; pp. 184–189. [Google Scholar]
- Ha, G.Y.; Seo, S.B.; Oh, H.S.; Jeon, W.S. LoRa ToA-based localization using fingerprint method. In Proceedings of the 2019 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, Republic of Korea, 16–18 October 2019; pp. 349–353. [Google Scholar]
- De Sousa, M.N.; Thomä, R.S. Applying Random Forest and Multipath Fingerprints to Enhance TDOA Localization Systems. IEEE Antennas Wirel. Propag. Lett. 2019, 18, 2316–2320. [Google Scholar] [CrossRef]
- Wei, C.; Xu, K.; Shen, Z.; Xia, X.; Xie, W.; Chen, L.; Xu, J. Joint AOA-RSS Fingerprint Based Localization for Cell-Free Massive MIMO Systems. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 590–595. [Google Scholar] [CrossRef]
- He, J.; So, H.C. A Hybrid TDOA-Fingerprinting-Based Localization System for LTE Network. IEEE Sensors J. 2020, 20, 13653–13665. [Google Scholar] [CrossRef]
- Li, C.; Trogh, J.; Plets, D.; Tanghe, E.; Hoebeke, J.; Poorter, E.D.; Joseph, W. CRLB-based Positioning Performance of Indoor Hybrid AoA/RSS/ToF Localization. In Proceedings of the 2019 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Pisa, Italy, 30 September–3 October 2019; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Talvitie, J.; Renfors, M.; Lohan, E.S. Distance-based interpolation and extrapolation methods for RSS-based localization with indoor wireless signals. IEEE Trans. Veh. Technol. 2015, 64, 1340–1353. [Google Scholar] [CrossRef]
- Bi, J.; Wang, Y.; Li, Z.; Xu, S.; Zhou, J.; Sun, M.; Si, M. Fast Radio Map Construction by using Adaptive Path Loss Model Interpolation in Large-Scale Building. Sensors 2019, 19, 712. [Google Scholar] [CrossRef] [Green Version]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of Fingerprints for Indoor WiFi Localization Based on Gaussian Process Regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Yiu, S.; Dashti, M.; Claussen, H.; Perez-Cruz, F. Wireless RSSI fingerprinting localization. Signal Process. 2017, 131, 235–244. [Google Scholar] [CrossRef]
- Tiwary, P.; Pandey, A.; Kumar, S. Differential d-Vectors for RSS based Localization in Dynamic IoT Networks. In Proceedings of the 2021 International Conference on COMmunication Systems NETworkS (COMSNETS), Bangalore, India, 5–9 January 2021; pp. 82–85. [Google Scholar] [CrossRef]
- Sun, Y.; Li, X.; Huang, Z.; Tian, J. An Improved Closed-Form Solution for Differential RSS-based Localization. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–5318. [Google Scholar] [CrossRef]
- Kjærgaard, M.B. Indoor location fingerprinting with heterogeneous clients. Pervasive Mob. Comput. 2011, 7, 31–43. [Google Scholar] [CrossRef]
- Fang, X.; Jiang, Z.; Nan, L.; Chen, L. Optimal weighted K-nearest neighbour algorithm for wireless sensor network fingerprint localisation in noisy environment. IET Commun. 2018, 12, 1171–1177. [Google Scholar] [CrossRef]
- Wang, B.; Gan, X.; Liu, X.; Yu, B.; Jia, R.; Huang, L.; Jia, H. A Novel Weighted KNN Algorithm Based on RSS Similarity and Position Distance for Wi-Fi Fingerprint Positioning. IEEE Access 2020, 8, 30591–30602. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, Z.; Xia, W.; Ni, Y.; Zhao, H. Weighted Adaptive KNN Algorithm with Historical Information Fusion for Fingerprint Positioning. IEEE Wirel. Commun. Lett. 2022, 11, 1002–1006. [Google Scholar] [CrossRef]
- Liu, S.; Sinha, R.S.; Hwang, S.H. Clustering-Based Noise Elimination Scheme for Data Pre-Processing for Deep Learning Classifier in Fingerprint Indoor Positioning System. Sensors 2021, 21, 4349. [Google Scholar] [CrossRef]
- Li, X.; Wang, J.; Liu, C.; Zhang, L.; Li, Z. Integrated WiFi/PDR/Smartphone Using an Adaptive System Noise Extended Kalman Filter Algorithm for Indoor Localization. ISPRS Int. J.-Geo-Inf. 2016, 5, 8. [Google Scholar] [CrossRef] [Green Version]
- Pandey, A.; Sequeira, R.; Kumar, S. SELE: RSS Based Siamese Embedding Location Estimator for a Dynamic IoT Environment. IEEE Internet Things J. 2021, 9, 3672–3683. [Google Scholar] [CrossRef]
- Wang, Y.; Shang, Y.; Tao, W.; Yu, Y. Target Positioning Algorithm Based on RSS Fingerprints of SVM of Fuzzy Kernel Clustering. Wirel. Pers. Commun. 2021, 119, 2893–2911. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H. SVM-based indoor localization in Wireless Sensor Networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; pp. 1144–1149. [Google Scholar] [CrossRef]
- Wye, K.F.P.; Zakaria, S.M.M.S.; Kamarudin, L.M.; Zakaria, A.; Ahmad, N.B.; Kamarudin, K. RSS-Based Fingerprinting Localization with Artificial Neural Network. J. Phys. Conf. Ser. 2021, 1755, 012033. [Google Scholar]
- Burghal, D.; Ravi, A.T.; Rao, V.; Alghafis, A.A.; Molisch, A.F. A comprehensive survey of machine learning based localization with wireless signals. arXiv 2020, arXiv:2012.11171. [Google Scholar]
- Sinha, R.S.; Hwang, S.H. Comparison of CNN Applications for RSSI-Based Fingerprint Indoor Localization. Electronics 2019, 8, 989. [Google Scholar] [CrossRef] [Green Version]
- Song, X.; Fan, X.; Xiang, C.; Ye, Q.; Liu, L.; Wang, Z.; He, X.; Yang, N.; Fang, G. A Novel Convolutional Neural Network Based Indoor Localization Framework With WiFi Fingerprinting. IEEE Access 2019, 7, 110698–110709. [Google Scholar] [CrossRef]
- El Boudani, B.; Kanaris, L.; Kokkinis, A.; Kyriacou, M.; Chrysoulas, C.; Stavrou, S.; Dagiuklas, T. Implementing deep learning techniques in 5G IoT networks for 3D indoor positioning: DELTA (DeEp Learning-Based Co-operaTive Architecture). Sensors 2020, 20, 5495. [Google Scholar] [CrossRef]
- Nagy, A.; Bigler, T.; Treytl, A.; Stenzl, R.; Wilker, S.; Sauter, T.; Wien, T. RSS-based Localization for Directional Antennas. In Proceedings of the 2020 25th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vienna, Austria, 8–11 September 2020; pp. 774–781. [Google Scholar] [CrossRef]
- Schloemann, J.; Buehrer, R.M. On the Value of Collaboration in Location Estimation. IEEE Trans. Veh. Technol. 2016, 65, 3585–3596. [Google Scholar] [CrossRef]
- Nazir, U.; Shahid, N.; Arshad, M.A.; Raza, S.H. Classification of localization algorithms for wireless sensor network: A survey. In Proceedings of the 2012 International Conference on Open Source Systems and Technologies, Lahore, Pakistan, 20–22 December 2012; pp. 1–5. [Google Scholar] [CrossRef]
- Wen, C.Y.; Hsiao, Y.C. Decentralized anchor-free localization for wireless ad-hoc sensor networks. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 2777–2785. [Google Scholar] [CrossRef]
- Sun, C.J.; Kuo, H.Y.; Lin, C.E. A sensor based indoor mobile localization and navigation using Unscented Kalman Filter. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 327–331. [Google Scholar] [CrossRef]
- You, W.; Li, F.; Liao, L.; Huang, M. Data fusion of UWB and IMU based on unscented Kalman filter for indoor localization of quadrotor UAV. IEEE Access 2020, 8, 64971–64981. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Dynamic Wireless Indoor Localization Incorporating With an Autonomous Mobile Robot Based on an Adaptive Signal Model Fingerprinting Approach. IEEE Trans. Ind. Electron. 2019, 66, 1940–1951. [Google Scholar] [CrossRef]
- Wang, W.; Marelli, D.; Fu, M. Dynamic Indoor Localization Using Maximum Likelihood Particle Filtering. Sensors 2021, 21, 1090. [Google Scholar] [CrossRef]
- Goel, S.; Gabela, J.; Kealy, A.; Retscher, G. An indoor outdoor cooperative localization framework for UAVs. In Proceedings of the International Global Navigation Satellite Systems (IGNSS) Conference, Kensington, NSW, Australia, 7–9 February 2018. [Google Scholar]
- Sung, W.; Choi, S.; You, K. TDoA based UGV localization using adaptive Kalman filter algorithm. In Proceedings of the 2008 Second International Conference on Future Generation Communication and Networking Symposia, Hinan, China, 13–15 December 2008; Volume 4, pp. 99–103. [Google Scholar]
- Lee, S.; Lee, W.; You, K. TDoA based UAV localization using dual-EKF algorithm. In Proceedings of the International Conference on Control and Automation, Jeju Island, Korea, 10–12 December 2009; pp. 47–54. [Google Scholar]
- Li, J.; Bi, Y.; Li, K.; Wang, K.; Lin, F.; Chen, B.M. Accurate 3d localization for mav swarms by uwb and imu fusion. In Proceedings of the 2018 IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 12–15 June 2018; pp. 100–105. [Google Scholar]
- Zhang, W.A.; Yang, X.; Yu, L.; Liu, S. Sequential Fusion Estimation for RSS-Based Mobile Robots Localization With Event-Driven WSNs. IEEE Trans. Ind. Inform. 2016, 12, 1519–1528. [Google Scholar] [CrossRef]
- Xu, S.; Dogançay, K.; Hmam, H. Distributed path optimization of multiple UAVs for AOA target localization. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3141–3145. [Google Scholar]
- Yucel, H.; Elibol, G.; Yayan, U. Wi-Fi Based Indoor Positioning System For Mobile Robots By Using Particle Filter. arXiv 2020, arXiv:2012.05286. [Google Scholar]
- Li, Y.; Shu, F.; Shi, B.; Cheng, X.; Song, Y.; Wang, J. Enhanced RSS-Based UAV Localization Via Trajectory and Multi-Base Stations. IEEE Commun. Lett. 2021, 25, 1881–1885. [Google Scholar] [CrossRef]
- Cheng, X.; Shi, W.; Cai, W.; Zhu, W.; Shen, T.; Shu, F.; Wang, J. Communication-Efficient Coordinated RSS-Based Distributed Passive Localization via Drone Cluster. IEEE Trans. Veh. Technol. 2022, 71, 1072–1076. [Google Scholar] [CrossRef]
- Yang, B.; Yang, E.; Yu, L.; Loeliger, A. High-Precision UWB-Based Localisation for UAV in Extremely Confined Environments. IEEE Sensors J. 2021, 22, 1020–1029. [Google Scholar] [CrossRef]
- Liu, R.; Qin, Z.; Zhang, H.; Lau, B.P.L.; Ismail, K.; Athukorala, A.; Yuen, C.; Guan, Y.L.; Tan, U. Collaborative Radio SLAM for Multiple Robots based on WiFi Fingerprint Similarity. arXiv 2021, arXiv:2110.06541. [Google Scholar]
- Zickler, S.; Veloso, M. RSS-based relative localization and tethering for moving robots in unknown environments. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 5466–5471. [Google Scholar] [CrossRef] [Green Version]
- Meles, M.; Rajasekaran, A.; Ruttik, K.; Virrankoski, R.; Jäntti, R. Measurement based performance evaluation of drone self-localization using AoA of cellular signals. In Proceedings of the 2021 24th International Symposium on Wireless Personal Multimedia Communications (WPMC), Okayama, Japan, 14–16 December 2021; pp. 1–5. [Google Scholar]
- Stojkoska, B.R.; Palikrushev, J.; Trivodaliev, K.; Kalajdziski, S. Indoor localization of unmanned aerial vehicles based on RSSI. In Proceedings of the IEEE EUROCON 2017—17th International Conference on Smart Technologies, Ohrid, Macedonia, 6–8 July 2017; pp. 120–125. [Google Scholar] [CrossRef]
- Al-Jazzar, S.O.; Jaradat, Y. AOA-based drone localization using wireless sensor-doublets. Phys. Commun. 2020, 42, 101160. [Google Scholar] [CrossRef]
- Xu, C.; Wang, Z.; Wang, Y.; Wang, Z.; Yu, L. Three passive TDOA-AOA receivers-based flying-UAV positioning in extreme environments. IEEE Sensors J. 2020, 20, 9589–9595. [Google Scholar] [CrossRef]
- Nguyen, T.M.; Nguyen, T.H.; Cao, M.; Qiu, Z.; Xie, L. Integrated uwb-vision approach for autonomous docking of uavs in gps-denied environments. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 9603–9609. [Google Scholar]
- Guo, K.; Li, X.; Xie, L. Simultaneous cooperative relative localization and distributed formation control for multiple UAVs. Sci. China Inf. Sci. 2020, 63, 119201. [Google Scholar] [CrossRef] [Green Version]
- Zhang, P.; Lu, J.; Wang, Y.; Wang, Q. Cooperative localization in 5G networks: A survey. ICT Express 2017, 3, 27–32. [Google Scholar] [CrossRef]
- Hayat, S.; Jung, R.; Hellwagner, H.; Bettstetter, C.; Emini, D.; Schnieders, D. Edge computing in 5G for drone navigation: What to offload? IEEE Robot. Autom. Lett. 2021, 6, 2571–2578. [Google Scholar] [CrossRef]
- Ferre, R.M.; Seco-Granados, G.; Lohan, E.S. Positioning Reference Signal Design for Positioning via 5G; National Committee for Radiology in Finland: Tampere, Finland, 2019. [Google Scholar]
- Del Peral-Rosado, J.A.; López-Salcedo, J.A.; Kim, S.; Seco-Granados, G. Feasibility study of 5G-based localization for assisted driving. In Proceedings of the 2016 International Conference on Localization and GNSS (ICL-GNSS), Barcelona, Spain, 28–30 June 2016; pp. 1–6. [Google Scholar]
- Saleh, S.; El-Wakeel, A.S.; Noureldin, A. 5G-Enabled Vehicle Positioning Using EKF With Dynamic Covariance Matrix Tuning Positionnement de véhicules à l’aide de la 5G utilisant un EKF avec réglage dynamique de la matrice de covariance. IEEE Can. J. Electr. Comput. Eng. 2022, 45, 192–198. [Google Scholar] [CrossRef]
- Pan, M.; Liu, P.; Jia, X.; Liu, S.; Qi, W.; Huang, Y. A Joint DOA and TOA Estimation Scheme for 5G Signals Under Array Modeling Errors. In Proceedings of the 2021 CIE International Conference on Radar (Radar 2021), Haikou, Hainan, China, 15–19 December 2021. [Google Scholar]
- Zhang, Z.; Wu, L.; Zhang, Z.; Dang, J.; Zhu, B.; Wang, L. AoA-and-Amplitude Fingerprint Based Indoor Intelligent Localization Scheme for 5G Wireless Communications. In Proceedings of the 2021 13th International Conference on Wireless Communications and Signal Processing (WCSP), Changsha, China, 20–22 October 2021; pp. 1–5. [Google Scholar]
- Jaeckel, S.; Raschkowski, L.; Börner, K.; Thiele, L. QuaDRiGa: A 3-D multi-cell channel model with time evolution for enabling virtual field trials. IEEE Trans. Antennas Propag. 2014, 62, 3242–3256. [Google Scholar] [CrossRef]
- Pan, M.; Liu, P.; Li, X.; Liu, S.; Qi, W.; Huang, Y. A Low-Complexity Joint AOA and TOA Estimation Method for Positioning with 5G Signals.
- Stahlke, M.; Feigl, T.; García, M.H.C.; Stirling-Gallacher, R.A.; Seitz, J.; Mutschler, C. Transfer Learning to adapt 6G AI-based Fingerprint Localization across Environments. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference (VTC2022-Spring), Helsinki, Finland, 19–22 June 2022; pp. 1–5. [Google Scholar]
- Meng, J.; Sharma, A.; Tran, T.X.; Balasubramanian, B.; Jung, G.; Hiltunen, M.; Hu, Y.C. A study of network-side 5G user localization using angle-based fingerprints. In Proceedings of the 2020 IEEE International Symposium on Local and Metropolitan Area Networks (LANMAN), Orlando, FL, USA, 13–15 July 2020; pp. 1–6. [Google Scholar]
- Menta, E.Y.; Malm, N.; Jäntti, R.; Ruttik, K.; Costa, M.; Leppänen, K. On the performance of AoA–based localization in 5G ultra–dense networks. IEEE Access 2019, 7, 33870–33880. [Google Scholar] [CrossRef]
- Sellami, A.; Nasraoui, L.; Atallah, L.N. Multi-stage localization for massive MIMO 5G systems. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–6. [Google Scholar]
- Klus, R.; Talvitie, J.; Valkama, M. Neural network fingerprinting and GNSS data fusion for improved localization in 5G. In Proceedings of the 2021 International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar]
- Wen, F.; Wymeersch, H.; Peng, B.; Tay, W.P.; So, H.C.; Yang, D. A survey on 5G massive MIMO localization. Digital Signal Process. 2019, 94, 21–28. [Google Scholar] [CrossRef] [Green Version]
- Deng, Z.; Zheng, X.; Zhang, C.; Wang, H.; Yin, L.; Liu, W. A TDOA and PDR fusion method for 5G indoor localization based on virtual base stations in unknown areas. IEEE Access 2020, 8, 225123–225133. [Google Scholar] [CrossRef]
- Mendrzik, R.; Wymeersch, H.; Bauch, G. Joint localization and mapping through millimeter wave MIMO in 5G systems. In Proceedings of the 2018 IEEE Global Communications Conference (GLOBECOM), Abu Dhabi, United Arab Emirates, 9–13 December 2018; pp. 1–6. [Google Scholar]
- Chu, X.; Lu, Z.; Gesbert, D.; Wang, L.; Wen, X. Vehicle localization via cooperative channel mapping. IEEE Trans. Veh. Technol. 2021, 70, 5719–5733. [Google Scholar] [CrossRef]
- Zhou, Z.H. Ensemble Methods: Foundations and Algorithms; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Dietterich, T.G. Ensemble methods in machine learning. In Proceedings of the International Workshop on Multiple Classifier Systems, Cagliari, Italy, 21–23 June 2000; Springer: Berlin/Heidelberg, Germany, 2000; pp. 1–15. [Google Scholar]
- Albanese, A.; Sciancalepore, V.; Costa-Pérez, X. First Responders Got Wings: UAVs to the Rescue of Localization Operations in Beyond 5G Systems. IEEE Commun. Mag. 2021, 59, 28–34. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Chen, X.; Luo, K.; Zhou, Z.; Yu, S. Edge Robotics: Edge-Computing-Accelerated Multi-Robot Simultaneous Localization and Mapping. IEEE Internet Things J. 2022, 9, 14087–14102. [Google Scholar] [CrossRef]
- Huang, P.; Zeng, L.; Luo, K.; Guo, J.; Zhou, Z.; Chen, X. ColaSLAM: Real-Time Multi-Robot Collaborative Laser SLAM via Edge Computing. In Proceedings of the 2021 IEEE/CIC International Conference on Communications in China (ICCC), Xiamen, China, 28–30 July 2021; pp. 242–247. [Google Scholar]
- Charléty, A.; Le Breton, M.; Larose, E.; Baillet, L. 2D Phase-based RFID localization for on-site landslide monitoring. Remote Sens. 2022, 14, 3577. [Google Scholar] [CrossRef]
- Sinha, P.; Guvenc, I. Impact of Antenna Pattern on TOA Based 3D UAV Localization Using a Terrestrial Sensor Network. IEEE Trans. Veh. Technol. 2022, 71, 7703–7718. [Google Scholar] [CrossRef]
- Hosseini, N.; Jamal, H.; Haque, J.; Magesacher, T.; Matolak, D.W. UAV command and control, navigation and surveillance: A review of potential 5G and satellite systems. In Proceedings of the 2019 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–10. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Brief Summary | 1 | 2 | 3 | 4 |
|---|---|---|---|---|---|
| [9] | A survey on RF localisation for UAV with focus on technologies and performance metrics | ✓ | ✗ | ✓ | ✗ |
| [8] | A survey on IoT localisation, investigating technologies and performance metrics | ✗ | ✗ | ✓ | ✗ |
| [10] | A comprehensive survey on localisation on WSN | ✗ | ✗ | ✓ | ✗ |
| [15] | A overview of the 5G-based localisation | ✗ | ✗ | ✗ | ✓ |
| [11] | A survey on IoT localisation | ✗ | ✗ | ✓ | ✗ |
| [12] | A survey on localisation techniques on WSN | ✗ | ✗ | ✓ | ✗ |
| [13] | A survey on localisation in WSN in 3D space | ✗ | ✗ | ✓ | ✗ |
| [14] | A survey on localisation on WSN algorithm and techniques | ✗ | ✗ | ✓ | ✗ |
| [16] | A brief review on range-free localisation algorithms in WSN | ✗ | ✗ | ✓ | ✗ |
| [7] | A comprehensive survey of the indoor localisation using different technologies | ✗ | ✗ | ✓ | ✗ |
| [17] | A brief review of technologies used for UAV positioning in indoor environment | ✓ | ✗ | ✗ | ✗ |
| Range-Based Methods | Scenario | Advantages | Disadvantages |
|---|---|---|---|
| Multi-lateration Triangulation | fast and rough estimation scenarios | simple calculation | limited accuracy, sensitive to measurement error |
| Min-Max | fast and rough estimation scenarios | low complexity, easy implementation | limited accuracy |
| Multidimensional Scaling (MDS) | cooperative localisation | reduce the complexity | difficult to include the knowledge about unequal measurement error |
| Least Square (LS) | high accuracy | easier implementation and less demanding than ML and Bayesian, gives estimation uncertainty | computationally demanding, less optimal compared to ML and Bayesian |
| Maximum Likelihood (ML) | high accuracy, inaccurate prior information (outperform Bayesian) | gives estimation uncertainty | computationally demanding |
| Bayesian Inference | higher accuracy, sparse observations | gives estimation uncertainty | computationally demanding (more demanding than LS and ML) |
| Extended Kalman Filter (EKF) | real-time dynamic state estimation Easy implementation for real-time | simpler multi-sensor fusion, suitable for mobile targets, easy implementation, gives estimation uncertainty | not useful for non-Gaussian noise, less optimal compared to UKF and PF |
| Unscented Kalman filter (UKF) | real-time dynamic state estimation, better accuracy compared to EKF | simpler multi-sensor fusion, suitable for mobile target, gives estimation uncertainty | not useful for non-gaussian noise |
| Particle Filter (PF) | high accuracy dynamic state estimation | handling non-gaussian noise, gives estimation uncertainty | computationally demanding, difficult implementation |
| Refs | Year | Range-Based/Fingerprinting | Distributed/Centralised | Cooperative/Non-Cooperative | Anchor-Based/Anchor-Free | 2D/3D | Experiment | Technique | Technology |
|---|---|---|---|---|---|---|---|---|---|
| [45] | 2014 | fingerprinting | centralised | non-cooperative | anchor-free | 2D | Yes | PF | WLAN/RSS |
| [80] | 2010 | range-based | centralised | non-cooperative | anchor-based | 2D | Yes | UKF | -/RSS |
| [81] | 2020 | range-based | centralised | non-cooperative | anchor-based | 3D | Yes | UKF | UWB/TOA |
| [82] | 2019 | fingerprinting | centralised | non-cooperative | anchor-based | 2D | Yes | PF | ZigBee/RSS |
| [83] | 2021 | fingerprinting | centralised | non-cooperative | anchor-free | 2D | Yes | PF-ML | WiFi/RSS |
| [84] | 2018 | range-based | centralised | cooperative | anchor-based | 3D | No | EKF | WiFi-UWB/RSS-TOA |
| [85] | 2008 | range-based | centralised | non-cooperative | anchor-based | 2D | No | EKF | -/TDOA |
| [86] | 2009 | range-based | centralised | non-cooperative | anchor-based | 2D | No | EKF | -/TDOA |
| [87] | 2018 | range-based | centralised | non-cooperative | anchor-based | 3D | Yes | LS | UWB/TOA |
| [88] | 2016 | range-based | centralised | non-cooperative | anchor-based | 2D | Yes | SRCKF | -/RSS |
| [89] | 2016 | range-based | distributed | cooperative | anchor-based | 2D | No | DEKF | -/AOA |
| [90] | 2020 | fingerprinting | centralised | non-cooperative | anchor-free | 2D | Yes | PF | -/RSS |
| [91] | 2021 | range-based | centralised | non-cooperative | anchor-based | 3D | No | ML | -/RSS |
| [92] | 2022 | range-based | distributed | cooperative | anchor-based | 3D | No | ML | -/RSS |
| [93] | 2021 | range-based | centralised | non-cooperative | anchor-based | 3D | Yes | EKF | UWB/TW-TOF |
| [94] | 2021 | fingerprinting | centralised | cooperative | anchor-free | 2D | Yes | ML | WiFi/RSS |
| [95] | 2010 | range-based | centralised | non-cooperative | anchor-based | 2D | Yes | Bayesian | -/RSS |
| [96] | 2021 | range-based | centralised | non-cooperative | anchor-based | 2D | Yes | LS | Cellular/AOA |
| [97] | 2017 | range-based | centralised | non-cooperative | anchor-based | 3D | No | MDS-WCL | WiFi/RSS |
| [98] | 2020 | range-based | centralised | non-cooperative | anchor-based | 3D | No | Lateration | -/AOA |
| [99] | 2020 | range-based | centralised | non-cooperative | anchor-based | 3D | No | LS | -/TDOA-AOA |
| [100] | 2019 | range-based | centralised | non-cooperative | anchor-based | 2D | Yes | RLS | UWB/TOA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kabiri, M.; Cimarelli, C.; Bavle, H.; Sanchez-Lopez, J.L.; Voos, H. A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives. Sensors 2023, 23, 188. https://doi.org/10.3390/s23010188
Kabiri M, Cimarelli C, Bavle H, Sanchez-Lopez JL, Voos H. A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives. Sensors. 2023; 23(1):188. https://doi.org/10.3390/s23010188
Chicago/Turabian StyleKabiri, Meisam, Claudio Cimarelli, Hriday Bavle, Jose Luis Sanchez-Lopez, and Holger Voos. 2023. "A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives" Sensors 23, no. 1: 188. https://doi.org/10.3390/s23010188
APA StyleKabiri, M., Cimarelli, C., Bavle, H., Sanchez-Lopez, J. L., & Voos, H. (2023). A Review of Radio Frequency Based Localisation for Aerial and Ground Robots with 5G Future Perspectives. Sensors, 23(1), 188. https://doi.org/10.3390/s23010188