1. Introduction
A seismometer is a precision instrument that measures ground motion through the principle of inertia by suspending a mass from an elastic element [
1]. While rotational ground motion can be measured [
2], traditionally seismic detection has focused on the translational motion [
3]. Earlier seismometers measured translational ground motion in the cardinal X, Y, and Z coordinate frame, corresponding to east/west, north/south, and vertical ground motion [
4,
5].
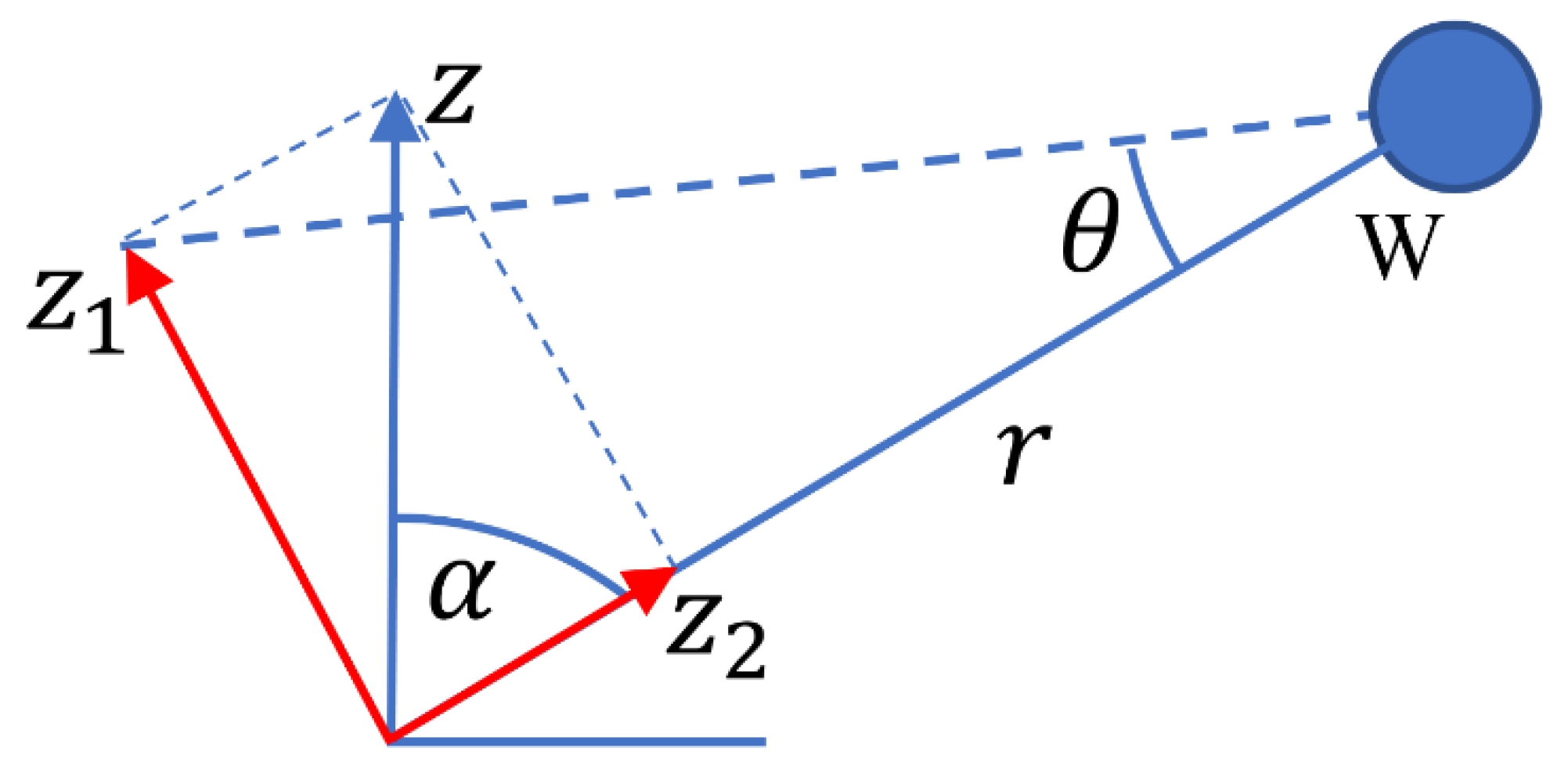
In the symmetric triaxial seismometer, three single-axis sensors are spaced equally apart on a circle in the horizontal plane while the vertical component of the sensors all experience the same gravitational acceleration. The UVW sensing directions are given by the direction orthogonal to the boom, which suspends the moving mass. As shown in
Figure 1, the tilt angle
is the angle that the boom makes with respect to the vertical direction (it is also the same angle that the sensing axis makes with the horizontal axis). For the Galperin symmetric triaxial seismometer,
is
or 35.26° and the UVW axes create an orthogonal reference frame [
6,
7,
8,
9,
10].
State-of-the-art seismometers, such as the Streckeisen STS-2 and the Nanometrics Inc. Trillium Compact, employ a symmetric Galperin configuration [
11,
12,
13,
14]. Recently, a microseismometer with a Galperin configuration has been proposed for Lunar deployment [
15]. Despite the ubiquity of the Galperin configuration, there are some advantages to the traditional cardinal X, Y, and Z configurations. The Streckeisen STS-1 seismometer, which is one of the most sensitive seismometers deployed on Earth [
16], employs the cardinal configuration [
5]. A new optical-based seismometer is in development and will use the cardinal configuration [
17]. A disadvantage of the cardinal configuration is that the vertical sensor must be designed separately from the horizontal sensors as it experiences an additional force from the local gravity. In contrast, the symmetric triaxial seismometer is created with three (ideally) identical sensors, providing manufacturing, calibration, and control benefits [
9].
While the Galperin configuration has primarily been used for triaxial symmetric seismometers, the Insight Seismic Experiment for Interior Structure Very Broad Band (SEIS-VBB) seismometer deployed on Mars [
18] uses a symmetric triaxial configuration that is not strictly Galperin, with a tilt angle
of approximately 30° [
19]. While the treatment of coordinate conversion is well established for the Galperin configuration [
8,
9,
10,
13] there has been less attention on the possible benefits of employing a non-Galperin tilt angle. In this work, we derive the analytical transformation matrix from test mass displacement in the UVW coordinate to ground displacement in the XYZ coordinates and evaluate how self-noise, which equally affects each of the U, V, and W sensors, translates into X, Y, and Z noise.
One limitation of the Galperin transformation matrix is that it was derived with the assumption of a point mass on a massless boom, while in practice, masses are distributed along the boom. Another limitation is its applicability at lower frequencies. At lower frequencies, the displacements perpendicular to the booms contains the resonance structure of the rotational mass-spring oscillator. A strict application of the Galperin transformation matrix would lead to an absurd result that the displacements on the ground also have this resonance structure. Both of these limitations do not affect the operations of seismometers when they use the torque feedback technique, which works at all frequencies and does not depend on how masses are distributed along the boom. Nonetheless, given the ubiquitous applications of the Galperin triaxial seismometers, it is useful to have a deeper understanding of how such seismometers would behave in the absence of torque feedback. This is particularly true in the commissioning phase of these seismometers, where torque feedback may be disabled to measure parameters needed to establish the noise model. Therefore, we have extended the transformation matrix to cover the case of distributed masses on the boom, and the case of lower frequency operations.
Since torque feedback is ubiquitously used, the most useful transformation matrix is one that transforms the feedback torque to ground acceleration. We derive such a transformation matrix using an extension of the equation of motion by Huang and Saulson [
20] to include external torques resulting from ground acceleration.
To keep the discussion easy to understand, we assumed that the component seismometers are oriented symmetrically with 120° separations and that they are identical. After the main idea is presented in the main text, the more laborious cases of non-symmetrical orientation and non-identical component seismometers are presented in
Appendix B and
Appendix C.
Although we have discussed the Brownian noise and noise due to temperature sensitivity, it is not the main focus of this paper to treat all noise issues of seismometers. We used Brownian noise and temperature sensitivity noise to discuss how un-correlated noise and correlated noise propagate through the Galperin transformation. The expression for both of these noises, in the vertical direction, had already been published by Erwin et al. [
21]. In the current paper, we illustrate how the Galperin transformation can be used to get the noise in the horizontal directions. For more in-depth discussions of other sources of noise in a seismometer, we refer the readers to a publication by Mimoun et al. [
22].
2. Extension of the Transformation Matrices to Treat Arbitrary Values of α
Figure 1 depicts the configuration of the symmetric triaxial seismometer. The Galperin transformation transforms the test mass displacements
(as viewed from the ground) in the U, V, and W direction into ground displacement
in the X, Y, and Z direction. As already mentioned, there is an implicit assumption that the ground is moving at frequencies much higher than the resonance frequencies of the rotational mass-spring oscillator. At such higher frequencies, the test mass does not move when viewed from an inertial reference frame. Only the ground moves.
In this section, we derive the individual contributions of ground displacements on the test mass displacements as viewed from the ground. The individual contributions can then be summed, from which we can ultimately obtain a transformation matrix from to .
2.1. Boom Displacement Due to Vertical Ground Motion
Consider that the ground moves upward by a displacement
, as depicted in
Figure 2 for the W component seismometer. We can decompose the upward
ground displacement into a component
parallel to the boom, and a component
perpendicular to it, as shown in red in
Figure 2. The component
does not cause the angle
to change, while the component
causes
to increase by an angle given by
. Since
, we have the result
where
is the displacement
caused by ground motion in the vertical direction. Similarly, for the U and V sensors, we find that the contributions due to ground motion in the Z direction are
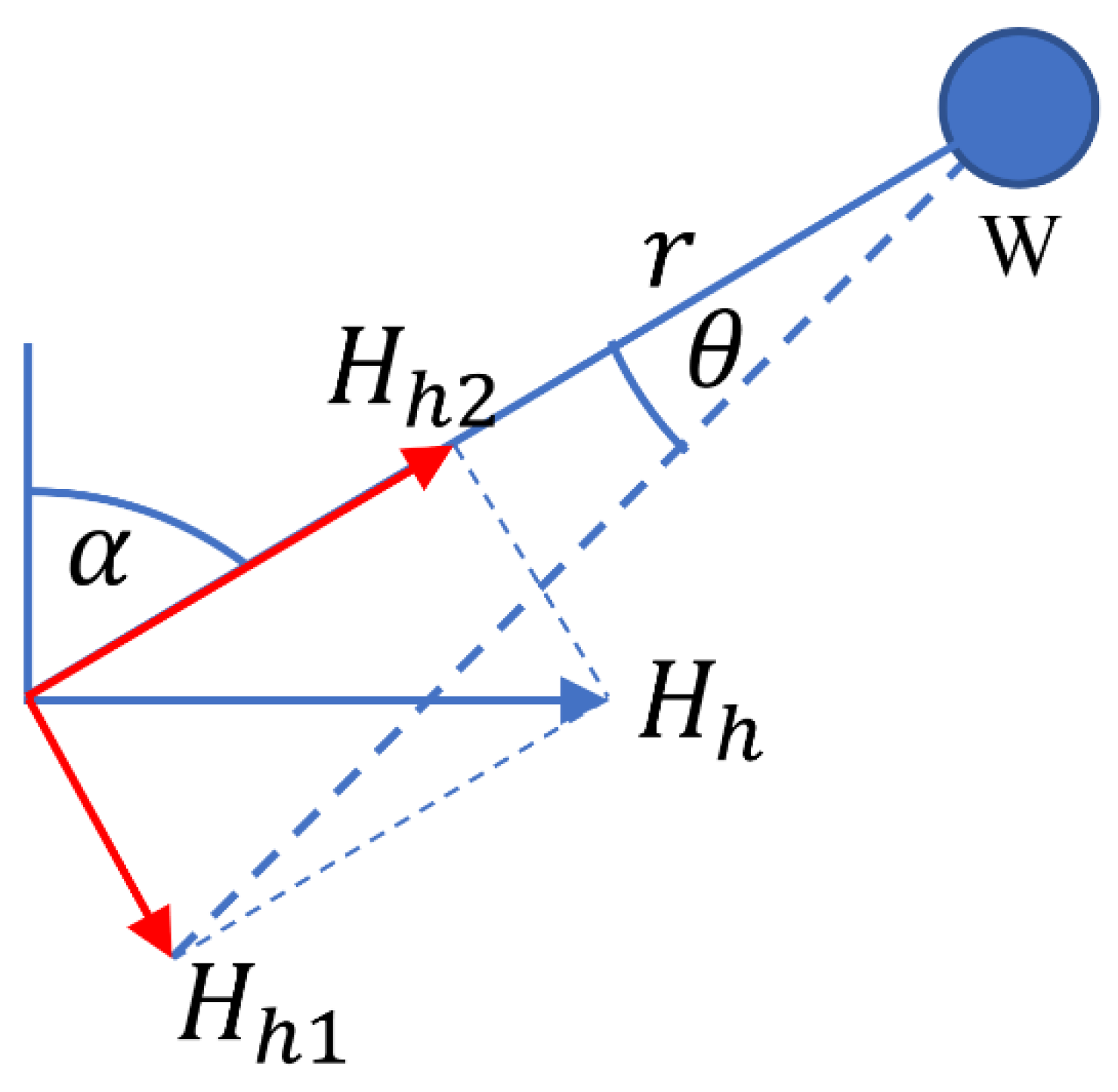
2.2. Boom Displacement Due to Horizontal Ground Motion
Now consider that the ground moves by a horizontal displacement
in the plane of rotation of the W component boom as depicted in
Figure 3. The displacement
can be decomposed into a component
along the direction of the boom, and a component
perpendicular to it, as shown in red in
Figure 3. The component
does not cause the angle
to change, while the component
causes
to decrease. Therefore,
. Since
, we find that
This horizontal motion has both an x and y-axis component. To see how this translates onto the UVW sensors, we consider the case where the ground moves by a displacement in the X and Y directions separately.
Horizontal Motion in the X direction. If the horizontal motion is in the X direction, the ground displacement
can be decomposed into a component
along the plane of motion of the W component seismometer, and a component
perpendicular to this plane, as shown by the red arrows in
Figure 1b. The component
cannot cause the angle
to change, while the component
can be identified as the displacement
in Equation (4). Therefore, Equation (4) becomes
where
. Following a similar process for the V component seismometer, we have
For the U component seismometer, one can change
in Equation (4) to
and identify
as
to obtain
Horizontal Motion in the Y direction. Consider the case where the ground moves horizontally by a displacement
along the y-axis. Since the motion is perpendicular to the plane of motion of the U component seismometer, it has no effect on the displacement
, hence
Applying the same process as discussed for motion in the X direction for the W component sensor, we obtain
2.3. Symmetric Triaxial Transformation Matrices
Since the displacement of a test mass is the sum of its displacements resulting from ground motion in the X, Y, and Z directions, we have
,
, and
. Arranging these three formulas in matrix notation, we arrive at the transformation matrix from XYZ to UVW signals
In
Appendix B, we present a more general form of this matrix with arbitrary angles.
Inverting this matrix, we obtain the conversion from UVW to XYZ
The transformation matrices in Equations (11) and (12) are valid for any tilt angle . One should note that the transformation matrix may differ slightly in the signs of its elements depending on how the UVW axis and the XYZ axis are arranged with respect to one another.
As a check on our matrices, we substitute for the Galperin configuration,
, into Equations (11) and (12). Making this substitution, we obtain the Galperin transformation matrices generally cited in the literature [
8,
9], where
and
We acknowledge that Equation (11) is the same as the one presented by Peng, Xue, and Yang [
10]. However, in their analysis, they used numerical transformation instead of the analytical form given by Equation (12).
3. Noise Conversions from UVW to XYZ Coordinates
In this section, we use the preceding transformation matrix to study how to instrument noise from the seismometer’s U, V, and W sensors propagate into ground displacement noise in the X, Y, and Z directions. We pay particular attention to how uncorrelated noises propagate as opposed to those of correlated noises. From Equation (12), we find that
3.1. Uncorrelated Noise Sources
We use the notation
to represent the root mean square value of
. We consider instrument noise that affects each sensor equally, i.e.,
. We first assume that the noise in
,
, and
are not correlated. Uncorrelated noises include Brownian noise and electronic noises from the displacement capacitance sensors. Applying the rule for the propagation of uncorrelated noise to Equations (15)–(17), we obtained
It is interesting to consider the cases where Equations (18)–(20) diverge and converge. For the case where the boom is aligned with the vertical axis (), all three component seismometers have no sensitivity to vertical ground motion; Equation (20) diverges while Equations (18) and (19) converge to . On the other hand, when all three booms are horizontal (), all three component seismometers have no sensitivity to horizontal ground motion; Equations (18) and (19) diverge whereas Equation (20) converges to .
3.2. Correlated Noise Sources
There are noise sources that are correlated. Noise induces by random temperature variation typically affects all three component seismometers together. For completely correlated noises, Equations (15)–(17) predict that
It is interesting to note that the Galperin transformation has the effect of suppressing correlated noise in the X and Y directions.
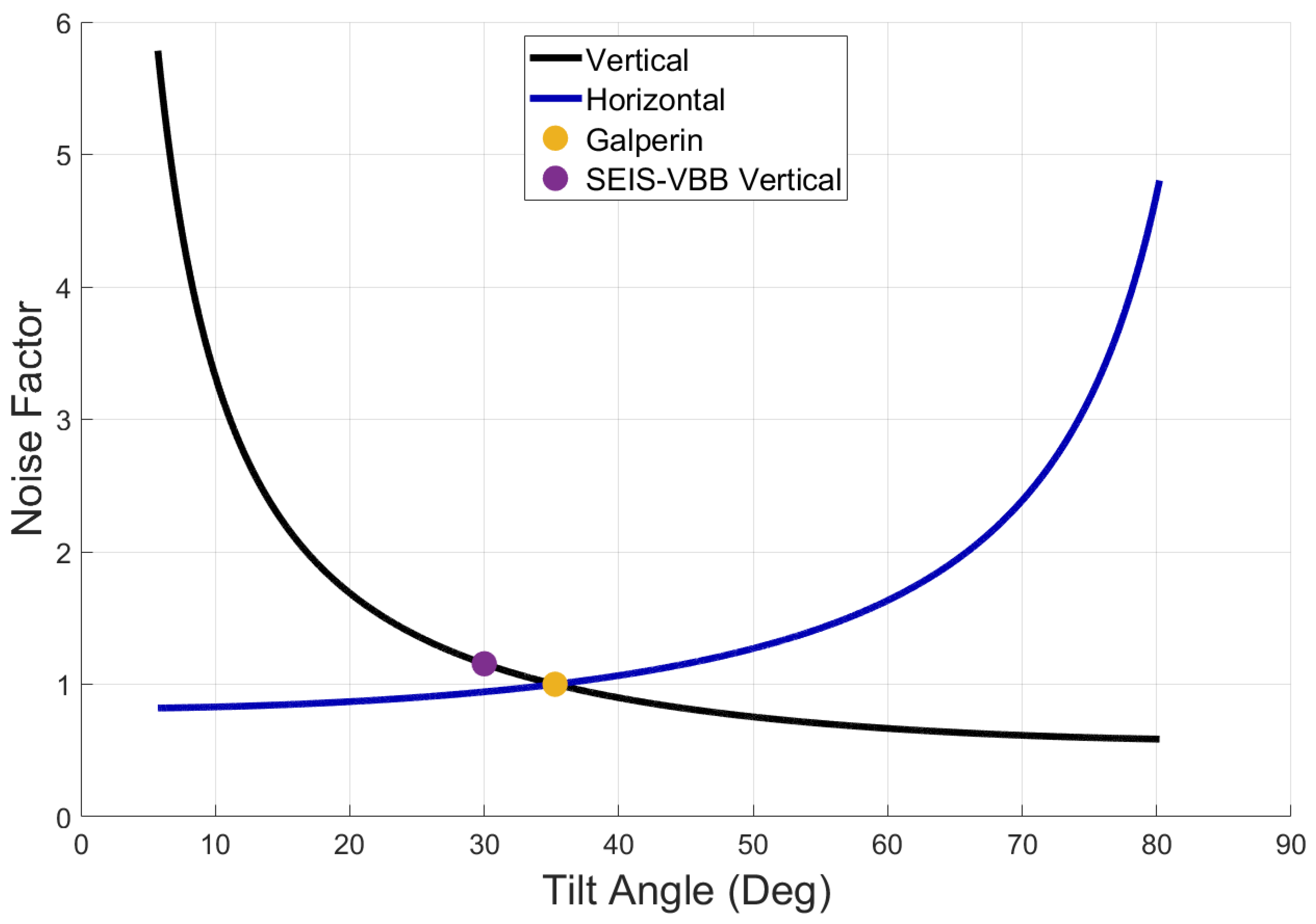
3.3. Noise Factor
In this subsection, we define a metric for evaluating how uncorrelated horizontal and vertical ground noise vary as a function of tilt angle. We define a horizontal noise factor as
, and a vertical noise factor as
. From Equations (18) and (20), we have
In
Figure 4, both noise factors are plotted as a function of tilt angle. For the Galperin configuration (
), both noise factors are 1. For the Very Broadband Seismometer of the Insight mission to Mars,
and the noise factor is 1.15 in the vertical, which is exactly what Lognonné et al. (2019) reported.
4. The Concept of Null Point
In the preceding derivation, the seismometer is assumed to be a point mass on a massless boom, while in any real seismometer, the mass is distributed along the boom, in which case there is no clear location along the boom where the displacements and should be evaluated. If it is not evaluated at the correct location, the transformation matrix will give the wrong answer for ground displacements. Conventional wisdom may lead us to use the location of the center of mass for the evaluation. Nevertheless, we will give an example to show that this is wrong.
In the preceding derivation, we assume that the ground moves at a frequency much higher than that of the resonance frequency of the mass-spring oscillator. In such a case, relative to an inertial frame, the test mass does not move, only the ground moves. For distributed mass on a boom, we expect that there is also a point on the boom which does not move, while the rest of the boom, as well as the ground move. We call this point the Null Point. The Null Point is the location where the displacement of a component seismometer should be evaluated because it will give a well-defined angular deflection of the boom when the ground moves up and down. If the ground moves up and down by a displacement
, then the angle of deflection increases and decreases by
where
is the distance between the Null Point and the pivot. To an observer on the ground (which is an accelerating frame), the Null Point would move up and down by the same displacement
, and the angle
would increase and decrease by the same
. This is the same
that should be used in the equation of motion of the system. The link between the equation of motion and the transformation matrix is therefore
Now, consider the example shown in
Figure 5, where there are two bodies of the same mass
on a massless boom. This is the simplest example of distributed masses on a boom. One body is always at the end of the boom of length
, while the other can be placed anywhere along the boom. We assume a variable distance
between the center of mass of the movable body and the pivot. When the movable body is also at the end of the boom, the Null Point will also be at the end of the boom, such as in the case discussed before with point mass. However, when the movable body is moved all the way to the pivot, it will move up and down with the pivot, which is attached to the ground. It will not contribute to the deflection of the boom. In this case, the Null point will also be at the end of the boom, and not at the location of the center of mass of the combined two bodies.
5. Extension of the Equation of Motion to Include Ground Acceleration
To derive a formula for
, we follow the derivation of Erwin et al. [
21] for the torque on the boom due to vertical ground acceleration. The static torque on the boom is
where
is the local gravitational acceleration,
and
are the suspended mass and its center of mass respectively. An observer on an accelerating platform (the ground) with an upward acceleration of
would feel an additional downward acceleration of the same value, as though the local gravity had increased. Therefore, the torque due to vertical ground acceleration is
Similarly, if the ground accelerated horizontally to the right along a direction
in the plane of motion of the boom, and if the horizontal acceleration is
, the masses on the boom would feel an equivalent gravitational pull of
on it. The additional torque on the boom would be
The derivations of Equations (28) and (29) are based on Einstein’s equivalence principle, which states that an observer on an enclosed accelerating platform cannot tell if he is on the acceleration platform or is being pulled by gravity on a stationary platform. This implies that the acceleration of the platform can be treated as an equivalent additional gravitational acceleration by an observer on the platform. Adding these torques as additional torques to the equation of motion of a rotational mass-spring oscillator as given by Huang and Saulson (1994), we obtain
where
is the moment of inertia,
is the rotational spring rate,
is the loss angle of spring material, and
is the viscous damping coefficient. The imaginary unit
is used to represent losses in the equation.
6. Using the Equation of Motion to Derive Dn
When the angular frequency
is much higher than the angular resonance frequency
, the
term dominates over the
and
term because
, while the
is only proportional to
. If we also neglect horizontal acceleration, the equation of motion simplifies to
or by integrating twice,
where
.
Comparing Equation (32) to Equation (25), we found that
. Therefore,
For example, as shown in
Figure 5,
. A plot of
vs.
is shown in
Figure 6 for
. The behavior of
is consistent with our intuitive discussion that the Null Point should be at the end of the boom when the movable body is moved all the way to the location of the pivot.
7. Extension of the Transformation Matrices for Operations at All Frequencies
The transformation matrices given in Equations (11) and (12) are valid only when
. With the help of the concept of a Null Point, we can extend the transformation to cover operations at all frequencies. In the frequency domain, the equation of motion given by Equation (30) becomes
where the transfer function
or
where the reduced angular spring constant is
, and the angular resonance frequencies are
,
and we have used the notation that a subscript of
on a quantity represents the normalized Fourier transform of that quantity. In this notation, the power spectral density of
θ is
, where
is normalized in a way that the Parseval theorem is obeyed i.e.,
. We apply Equation (34) to the W component seismometer by using
from Equation (26). We then multiply Equation (34) by
, and apply
from Equation (32) we obtain
For a triaxial seismometer, one can decompose the displacement in each of the U, V, and W seismometers as a result of ground acceleration in the X, Y, and Z directions. For example, if
is the displacement in the W seismometer due to ground acceleration in the Z direction, then from Equation (36)
Similarly, from Equation (36) the displacement in the W seismometer due to ground acceleration in the horizontal direction in the plane of rotation is
Comparing Equation (37) to Equation (1), one notices that if one replaces
and
in Equation (1) with
and
respectively, Equation (1) will turn into Equation (37). Similarly, if one replaces
and
in Equation (4) with
and
respectively, Equation (4) will turn into Equation (38). Due to the one-to-one correspondence, one can write the frequency domain transformation for any frequency as
where the measured displacement in the U seismometer is
. Similarly,
, and
. Inverting this, we obtain
At high frequencies, , Equations (39) and (40) becomes Equations (11) and (12).
In Equations (39) and (40), the displacement , and are evaluated at the Null Point. However, one can easily evaluate the displacement at the sensor position by replacing , and in Equations (39) and (40) with , and respectively where , and are the displacement measured at the motion sensor and is the distance from the motion sensor to the pivot.
The time domain transformation from
,
, and
to
,
, and
is more complicated. It is discussed in
Appendix E.
8. Extension of the Transformation Matrices for Torque Feedback Operations
Generally, the triaxial seismometers are operated in a torque feedback mode, which gives valid results for all frequencies.
In the presence of externally applied torque, the equation of motion (Equation (30)) becomes
where the externally applied torque
includes the Brownian noise torque
, the feedback torque
, and the torque due to ground motion
, i.e.,
, and
Consider the case where torque feedback is used to keep
close to zero, and Brownian torque is negligible. In this case, for a single-component seismometer, the equation of motion (Equation (41)) becomes
For a triaxial seismometer, one can decompose
into component torques in each of the U, V, and W seismometers as a result of ground acceleration in X, Y, and Z directions. For example, if
is the feedback torque in the W seismometer due to ground acceleration in the Z direction, then from Equation (42)
Similarly,
Similarly, the feedback torque in the W seismometer due to ground acceleration in the horizontal direction in the plane of rotation is
Using the same argument of one-to-one correspondence of equations to those in Equation (1) through Equation (10), we found that
where the measured feedback torque in the U seismometer is
. Similarly,
, and
.
Inverting the matrix, we obtain the conversion matrix from measuring feedback torques to ground accelerations as.
In
Appendix D, we generalize this matrix to cover the case of non-identical component seismometers that are not separated 120° appart.
Notice that the concept of Null Point is not needed in this derivation. Since the torque feedback technique is most frequently used, the necessity of the concept of the Null Point was never realized.
9. Brownian Noise
As an example of how to use our transformation matrices, we demonstrate how the Brownian noise in the vertical direction presented by Erwin et al. [
21] can be extended to give Brownian noise in the x and y directions. The seismometer output noise in the vertical direction due to Brownian motion is given by Erwin et al. [
21] as
where the Brownian torque noise spectral density is
and
is the viscous damping coefficient. This Brownian torque noise is a translation from the Brownian force noise in a linear mass-spring oscillator presented by Erwin et al. [
23].
In the following, we shall define as the acceleration output of the triaxial seismometer, as the Brownian noise component of this output.
If the torque due to ground acceleration is substantially smaller than Brownian torque noise, the measured feedback torque would be predominantly the Brownian torque. Since the seismometer would make use of Equation (46) to calculate ground acceleration in the X, Y, and Z directions. It would misinterpret this Brownian torque as ground acceleration. The seismometer’s acceleration output in the time domain would therefore be
where
is the Brownian torque in the U seismometer. In the frequency domain,
,
and
are uncorrelated with a magnitude given by Equation (48). We use the rule for error propagation for uncorrelated signals and obtained the Brownian noise spectrum in the X and Y directions as
and the same
as given by Erwin et al. [
21] and shown in Equation (47).
One should also note that for a single-component seismometer, the output Brownian noise in the vertical and horizontal directions are and respectively. One should also note that these two noises are completely correlated because the rotational mass-spring oscillator has only one degree of thermodynamic freedom. These two noises must originate from the same degree of freedom and therefore must be correlated.
In
Appendix F, we present another way to derive the Brownian noise in the vertical direction and show that it is consistent with Equation (47) only if the Null Point distance
is used. If other distances such as the location of the displacement sensor were used, it would lead to an inconsistent result. This illustrates the importance of the concept of the Null Point in making the physics of the rotational mass-spring oscillator consistent.
10. Temperature Sensitivity
The usefulness of our transformation matrix can also be illustrated by extending the temperature sensitivity in the vertical direction as derived by Erwin et al. [
21] to cover the temperature sensitivities in the X and Y directions. Erwin et al. [
21] showed that the temperature sensitivity in the vertical direction is
where the relative coefficient of thermal expansion of the boom is
, and
is the relative thermoelastic coefficient of the spring,
is the angle between the boom and the vertical in the absence of gravity, and
is the angular spring rate when the frequency of the oscillator is reduced by mechanical or electrostatic means. Following the derivation of Erwin et al. [
21], we obtained the temperature sensitivity in the horizontal direction in the plane of rotation as
Since the U, V, and W component seismometers are constructed the same way, they are likely to have close to the same temperature sensitivity. Assuming that their temperature sensitivities are the same and that the temperature differences between them are small compared to the temperature excursion, then the error signal due to temperature changes would be largely correlated. Assuming perfect correlation, Equation (46) or Equation (21) gives
and
is the same as that of a single-component seismometer given by Equation (51). It is rather surprising to find that the ideal symmetric triaxial seismometer’s output in the X and Y direction is not sensitive to temperature change under ideal conditions. In practice, the assumptions stated are not met to a certain extent. The thermal sensitivities of the U, V, and W seismometer components are not identical. The temperature perturbations experienced by U, V, and W are not identical. For example, solar radiation hits the seismometer from one side which leads to lateral temperature gradients. Inhomogeneity of the thermal insulation and inhomogeneity of the thermal properties of the sensor and the soil on which it rests, all lead to non-identical temperature noise at the three component seismometers. However, based on the results from the ideal case, one should expect a significant reduction in temperature sensitivity compared to that of a single-component seismometer in the horizontal direction (see Equation (52)). The zero sensitivity in the ideal case should also motivate developers of the next-generation seismometers to minimize non-ideal effects that cause the temperature sensitivity to be non-zero in the X and Y directions.
11. Discussion
When considering the seismometer self-noise, the noise formulas predict infinite noise for the case where a seismometer is tilted at such an angle that it cannot measure motion in the desired direction. The concept of infinite noise requires some explanation. We start by considering then, . To show that this is correct, one can hypothetically consider the opposite case, where the noise is finite when approaches zero. What it would mean is that such a seismometer, with the boom pointing upward, would be able to measure z component ground displacement to within some degree of uncertainty. This would contradict our intuition that such a seismometer would not be able to measure ground motion in the vertical direction at all.
In the literature, the transformation matrix is not usually presented analytically, and instead is given numerically [
8,
9]. In the work of Graizer (2009) the matrix is given analytically, but if we used the same approach to consider noise, the matrix would lead us to find that when
then,
(see
Appendix A), which goes against our intuition. The matrix in Graizer was likely derived by taking the transpose of Equation (11), which is valid for the Galperin configuration in which UVW leads to an orthogonal matrix, but no longer holds for non-Galperin angles.
The triaxial seismometer considered here was evaluated for the idealized case in which each sensor had an identical tilt angle and equal spacing in the horizontal, as is standard in the literature (Graizer, 2009; Wielandt, 2002; Townsend, 2014). In practice, due to manufacturing tolerance and levelling capabilities, each sensor has a unique tilt angle (see Lognonné et al., 2019). This requires the data scientist to account for the individuality of each sensor. In the appendices, we present a general transformation matrix, which accounts for misalignments of the various angles in the system, as well as component seismometers that are not identical.
12. Summary
We have filled in several gaps in our understanding of the Galperin triaxial seismometers. (1) We extended the Galperin transformation matrix to cover arbitrary values of the angle
. (2) We extended the Galperin transformation matrix to cover the more realistic case where masses can be distributed along the boom. We introduced the concept of Null Point to help with the understanding of how distributed masses should be treated. (3) We presented an equation of motion for a rotational mass-spring oscillator under the influence of ground acceleration in both the vertical and horizontal directions. (4) With this equation of motion, we derived the formula for
—the distance between the pivot and the Null Point. (5) With the help of this formula and our equation of motion, we extended the Galperin transformation matrix to cover the case of lower-frequency signals. (6) Our equation of motion also allows us to extend the transformation matrix to cover the case of torque feedback, which is the mode of operation used by nearly all seismometers. (7) We applied our transformation matrix to understand how uncorrelated noise propagates from the sensors to the acceleration output of the seismometer. With this, we extended the output noise of a triaxial seismometer in the vertical direction due to Brownian noise by Erwin et al. [
21], to cover output noises in the X and Y directions. (8) We also applied our transformation matrix to understand how correlated noises propagate. Since the three component seismometers are sitting on the same thermally isolated platform, we expect that the temperature noise they experienced is largely correlated. Assuming the ideal case of complete correlation and identical component seismometers, we found a surprising result that these noises cancel out in the X and Y directions. In a more realistic case of incomplete correlation, we still expect the temperature sensitivity in the X and Y directions of a triaxial seismometer to be much smaller than the horizontal temperature sensitivity of a single component seismometer. (9) We have also derived a formula for the horizontal temperature sensitivity of a single-component seismometer. (10) In the appendices, we have further extended these matrices to cover cases of non-symmetric and non-identical component seismometers. Finally, a deeper understanding of the physics of this type of seismometer will help in the development of more sensitive ones for future planetary exploration.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}






