

TransNet: Transformer-Based Point Cloud Sampling Network


Abstract
:1. Introduction
- We propose TransNet, a novel self-attention-based point cloud sampling network, as a task-oriented objective.
- Our approach demonstrates enhanced performance on point cloud tasks, outperforming both task-agnostic and task-oriented methods.
- This approach effectively addresses the long-range dependency issues that are commonly encountered in point clouds. Thus, it has a notable impact on the sparsely sampled point clouds, where a high sampling ratio is required to effectively capture the underlying geometric structures.
2. Related Work
3. Proposed TransNet
3.1. Transformer-Based Sampling Layer
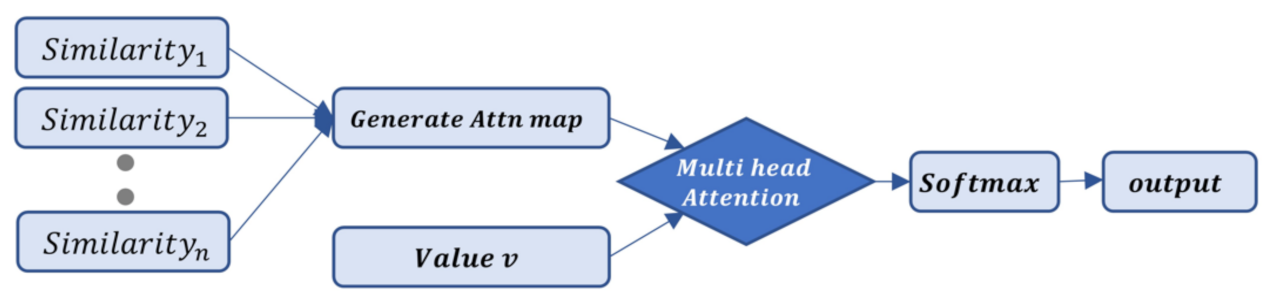
3.2. Attention Score Map
3.3. Decoder
3.4. Loss
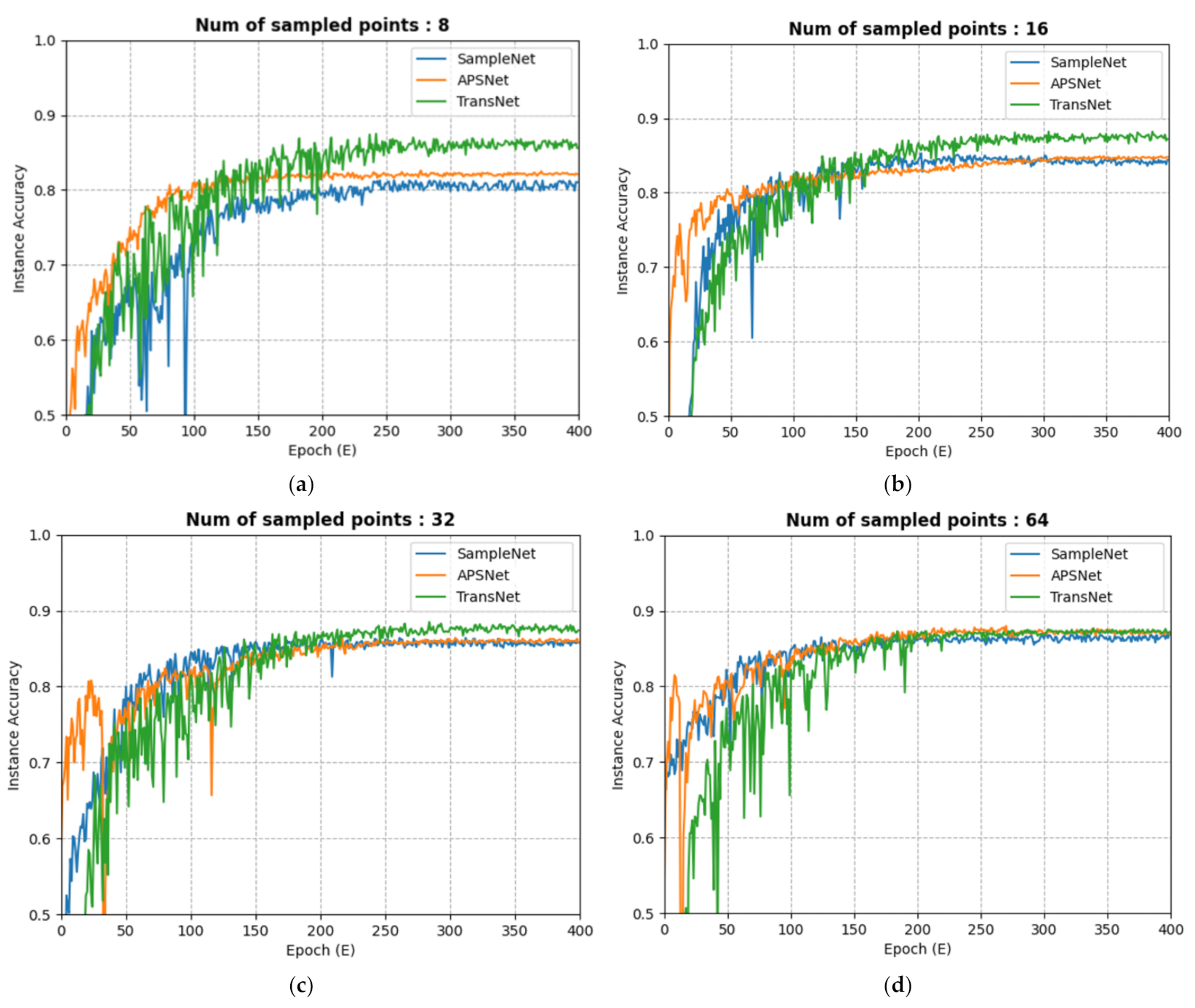
4. Experimental Results and Discussion



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sampling Ratio | Laptop | Chair | Nightstand | Airplane | |
|---|---|---|---|---|---|
| 128 | SampleNet | 81.32 | 91.38 | 38.18 | 97.51 |
| APSNet | 83.33 | 95.56 | 42.18 | 98.52 | |
| TransNet | 85.32 | 96.49 | 51.88 | 99.1 | |
| 64 | SampleNet | 85.23 | 94.38 | 59.38 | 98.11 |
| APSNet | 88.88 | 95.52 | 64.67 | 99.49 | |
| TransNet | 91.42 | 96.52 | 65.92 | 99.55 | |
| 32 | SampleNet | 89.29 | 86.38 | 67.21 | 98.89 |
| APSNet | 90.90 | 94.68 | 67.39 | 99.50 | |
| TransNet | 90.91 | 97.05 | 72.50 | 99.00 |
5. Conclusions
6. Ablation Study
6.1. K-Nearest
6.2. Additional Experiments
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Liang, Z.; Guo, Y.; Feng, Y.; Chen, W.; Qiao, L.; Zhou, L.; Zhang, J.; Liu, H. Stereo matching using multi-level cost volume and multi-scale feature constancy. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 43, 300–315. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Lu, M.; Wan, J. Rotational projection statistics for 3D local surface description and object recognition. Int. J. Comput. Vis. 2013, 105, 63–86. [Google Scholar] [CrossRef]
- Guo, Y.; Bennamoun, M.; Sohel, F.; Lu, M.; Wan, J. 3D object recognition in cluttered scenes with local surface features: A survey. IEEE Trans. Pattern Anal. Mach. Intell. 2014, 36, 2270–2287. [Google Scholar] [CrossRef] [PubMed]
- Lawin, F.J.; Danelljan, M.; Tosteberg, P.; Bhat, G.; Khan, F.S.; Felsberg, M. Deep Projective 3D Semantic Segmentation. In Proceedings of the International Conference on Computer Analysis of Images and Patterns, Ystad, Sweden, 22–24 August 2017; pp. 95–107. [Google Scholar]
- Boulch, A.; Le Saux, B.; Audebert, N. Unstructured Point Cloud Semantic Labeling Using Deep Segmentation Networks. In Proceedings of the Workshop 3D Object Retrieval, Lyon, France, 23–24 April 2017; pp. 17–24. [Google Scholar]
- Maturana, D.; Scherer, S. Voxnet: A 3d Convolutional Neural Network for Real-Time Object Recognition. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Riegler, G.; Ulusoy, A.O.; Geiger, A. Octnet: Learning Deep 3d Representations at High Resolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Wang, P.-S.; Liu, Y.; Guo, Y.X.; Sun, C.Y.; Tong, X. O-cnn: Octree-based convolutional neural networks for 3d shape analysis. ACM Trans. Graph. (TOG) 2017, 36, 1–11. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. Pointnet: Deep Learning on Point Sets for 3d Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017. [Google Scholar]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. Pointnet++: Deep hierarchical feature learning on point sets in a metric space. In Proceedings of the 2017 Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Zaheer, M.; Kottur, S.; Ravanbakhsh, S.; Poczos, B.; Salakhutdinov, R.R.; Smola, A.J. Deep sets. In Proceedings of the 2017 Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Song, W.; Liu, Z.; Tian, Y.; Fong, S. Pointwise CNN for 3d object classification on point cloud. J. Inf. Process. Syst. 2021, 17, 787–800. [Google Scholar]
- Thomas, N.; Smidt, T.; Kearnes, S.; Yang, L.; Li, L.; Kohlhoff, K.; Riley, P. Tensor field networks: Rotation-and translation-equivariant neural networks for 3d point clouds. arXiv 2018, arXiv:1802.08219. [Google Scholar]
- Groh, F.; Wieschollek, P.; Hendrik; Lensch, P.A. Flex-Convolution: Million-Scale Point-Cloud Learning Beyond Grid-Worlds. In Proceedings of the Computer Vision–ACCV 2018: 14th Asian Conference on Computer Vision, Perth, Australia, 2–6 December 2018; Revised Selected Papers, Part I 14; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Wu, W.; Qi, Z.; Fuxin, L. Pointconv: Deep Convolutional Networks on 3d Point Clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Thomas, H.; Qi, C.R.; Deschaud, J.E.; Marcotegui, B.; Goulette, F.; Guibas, L.J. Kpconv: Flexible and Deformable Convolution for Point Clouds. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Li, J.; Chen, B.M.; Lee, G.H. So-net: Self-Organizing Network for Point Cloud Analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Wang, Y.; Sun, Y.; Liu, Z.; Sarma, S.E.; Bronstein, M.M.; Solomon, J.M. Dynamic graph cnn for learning on point clouds. ACM Trans. Graph. (TOG) 2019, 38, 1–12. [Google Scholar] [CrossRef]
- Aoki, Y.; Goforth, H.; Srivatsan, R.A.; Lucey, S. Pointnetlk: Robust & Efficient Point Cloud Registration Using Pointnet. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Wang, W.; Yu, R.; Huang, Q.; Neumann, U. SGPN: Similarity Group Proposal Network for 3d Point Cloud Instance Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar]
- Wang, X.; Liu, S.; Shen, X.; Shen, C.; Jia, J. Associatively Segmenting Instances and Semantics in Point Clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Dovrat, O.; Lang, I.; Avidan, S. Learning to Sample. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Lang, I.; Manor, A.; Avidan, S. SampleNet: Differentiable Point Cloud Sampling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Ye, Y.; Yang, X.; Ji, S. APSNet: Attention Based Point Cloud Sampling. arXiv 2022, arXiv:2210.05638. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. In Proceedings of the 2017 Conference on Neural Information Processing Systems (NIPS 2017), Long Beach, CA, USA, 4–9 December 2017; Volume 30. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. Pointrcnn: 3D Object Proposal Generation and Detection from Point Cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Shi, S.; Guo, C.; Jiang, L.; Wang, Z.; Shi, J.; Wang, X.; Li, H. Pv-rcnn: Point-Voxel Feature Set Abstraction for 3d Object Detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Jiang, M.; Wu, Y.; Zhao, T.; Zhao, Z.; Lu, C. Pointsift: A sift-like network module for 3d point cloud semantic segmentation. arXiv 2018, arXiv:1807.00652. [Google Scholar]
- Yang, G.; Huang, X.; Hao, Z.; Liu, M.Y.; Belongie, S.; Hariharan, B. Pointflow: 3d Point Cloud Generation with Continuous Normalizing Flows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Vakalopoulou, M.; Chassagnon, G.; Bus, N.; Marini, R.; Zacharaki, E.I.; Revel, M.P.; Paragios, N. Atlasnet: Multi-Atlas Non-Linear Deep Networks for Medical Image Segmentation. In Medical Image Computing and Computer Assisted Intervention–MICCAI 2018: 21st International Conference, Granada, Spain, September 16–20, 2018, Part IV 11; Springer International Publishing: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Zhao, H.; Jiang, L.; Jia, J.; Torr, P.H.; Koltun, V. Point Transformer. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Lai, X.; Liu, J.; Jiang, L.; Wang, L.; Zhao, H.; Liu, S.; Qi, X.; Jia, J. Stratified Transformer for 3d Point Cloud Segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022. [Google Scholar]
- Wu, F.; Fan, A.; Baevski, A.; Dauphin, Y.N.; Auli, M. Pay less attention with lightweight and dynamic convolutions. arXiv 2019, arXiv:1901.10430. [Google Scholar]
- Hu, H.; Zhang, Z.; Xie, Z.; Lin, S. Local Relation Networks for Image Recognition. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021. [Google Scholar]
- Zhao, H.; Jia, J.; Koltun, V. Exploring Self-Attention for Image Recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Song, S.; Khosla, A.; Yu, F.; Zhang, L.; Tang, X.; Xiao, J. 3d Shapenets: A Deep Representation for Volumetric Shapes. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar]



| Sampling Ratio | 128 | 64 | 32 | 16 |
|---|---|---|---|---|
| RS | 8.7 | 24.87 | 54.53 | 79.26 |
| FPS | 24.3l | 55.12 | 76.92 | 87.53 |
| SampleNet [23] | 80.71 | 85.32 | 86.38 | 87.10 |
| APSNet [24] | 82.72 | 84.89 | 86.66 | 88.00 |
| TransNet | 87.47 | 88.16 | 88.49 | 87.88 |
| K-Size | TransNet-4 | TransNet-8 | TransNet-16 | TransNet-32 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sampling ratio | 128 | 64 | 32 | 128 | 64 | 32 | 128 | 64 | 32 | 128 | 64 | 32 |
| Instance Accuracy | 85.36 | 86.24 | 85.32 | 85.95 | 86.68 | 85.93 | 87.47 | 88.16 | 88.49 | 86.21 | 87.67 | 87.58 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.; Jeon, J.; Hong, S.; Kim, J.; Yoo, J. TransNet: Transformer-Based Point Cloud Sampling Network. Sensors 2023, 23, 4675. https://doi.org/10.3390/s23104675
Lee H, Jeon J, Hong S, Kim J, Yoo J. TransNet: Transformer-Based Point Cloud Sampling Network. Sensors. 2023; 23(10):4675. https://doi.org/10.3390/s23104675
Chicago/Turabian StyleLee, Hookyung, Jaeseung Jeon, Seokjin Hong, Jeesu Kim, and Jinwoo Yoo. 2023. "TransNet: Transformer-Based Point Cloud Sampling Network" Sensors 23, no. 10: 4675. https://doi.org/10.3390/s23104675
APA StyleLee, H., Jeon, J., Hong, S., Kim, J., & Yoo, J. (2023). TransNet: Transformer-Based Point Cloud Sampling Network. Sensors, 23(10), 4675. https://doi.org/10.3390/s23104675