
Channel Characterization and Modeling for 6G UAV-Assisted Emergency Communications in Complicated Mountainous Scenarios

Abstract
:1. Introduction
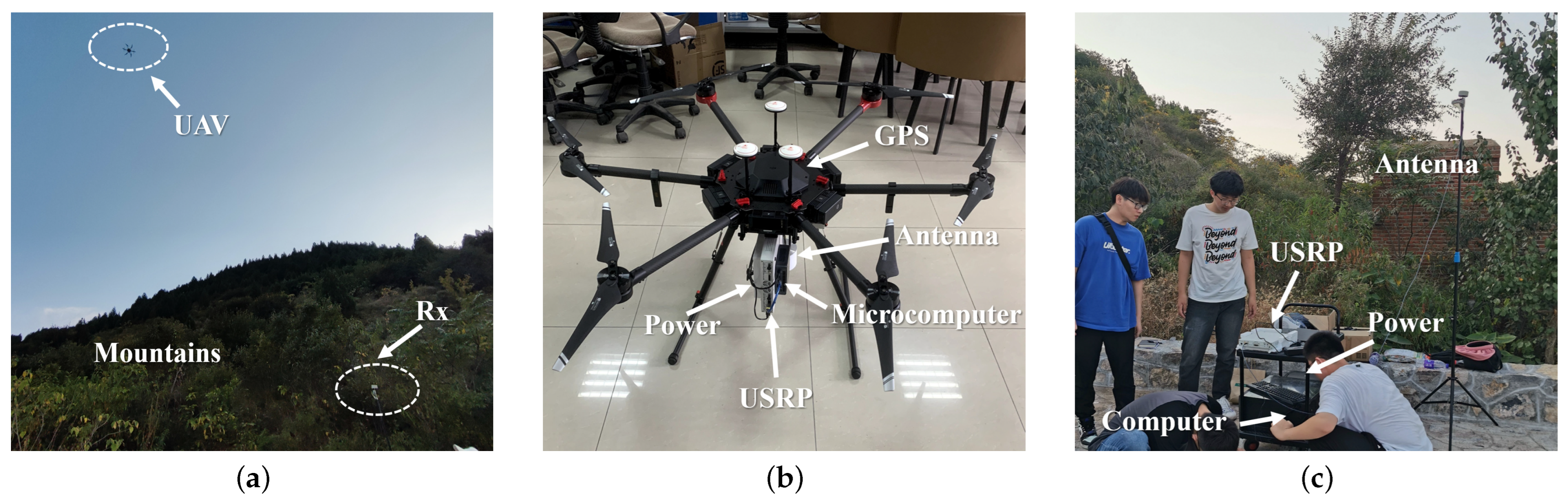
- The UAV-assisted emergency communications network architecture in the mountainous scenarios was built based on a realistic scenario using the RT method. Meanwhile, the channel measurement was carried out in mountainous scenarios. Using the measurement data, the accuracy and practicality of the RT method could be well verified.
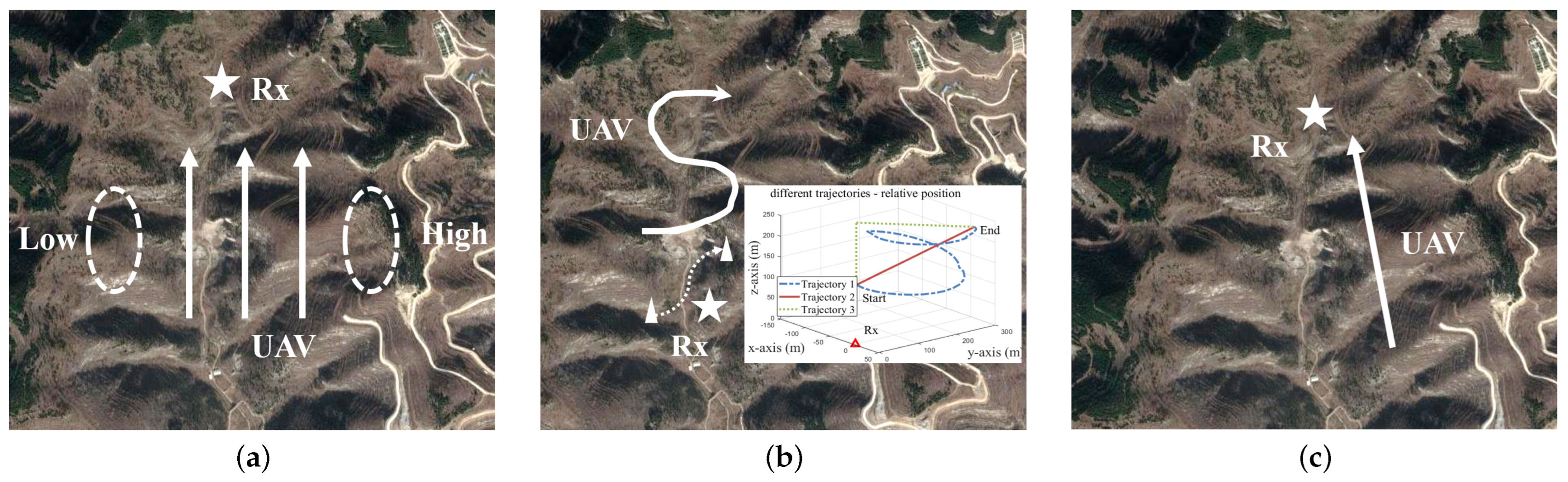
- Based on the channel data using the RT method, the effects of a UAV navigating mountain positions on channel characteristics were derived and analyzed. Also, different influences of flight altitudes and common flight trajectories were compared.
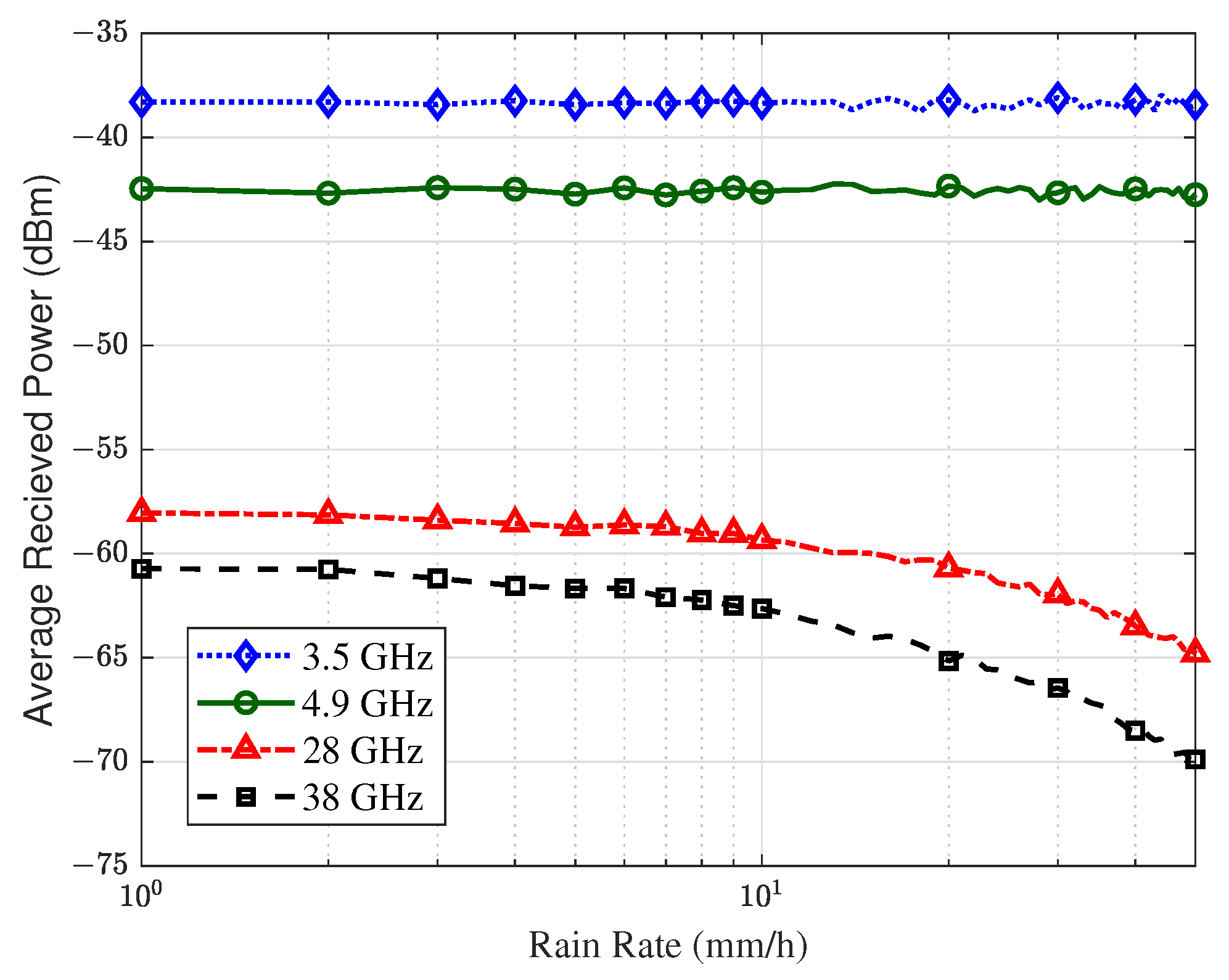
- The channel propagation characteristics of different frequency bands (3.5 GHz, 4.9 GHz, 28 GHz, and 38 GHz) were analyzed and compared in complicated mountainous scenarios, e.g., Rician K-factor, path loss (PL), the angle domain characteristics, the delay domain characteristics, channel capacity, etc. Furthermore, the effect of severe weather such as rain on propagation was simulated and studied.
2. UAV Communications Network Architecture and Simulation Setup
2.1. Descriptions of Network Architecture
2.2. Mountainous Scenarios Reconstruction
3. Ray-Tracing Based Typical Channel Characterization
3.1. Channel Data Acquisition
3.2. Typical Channel Characterization
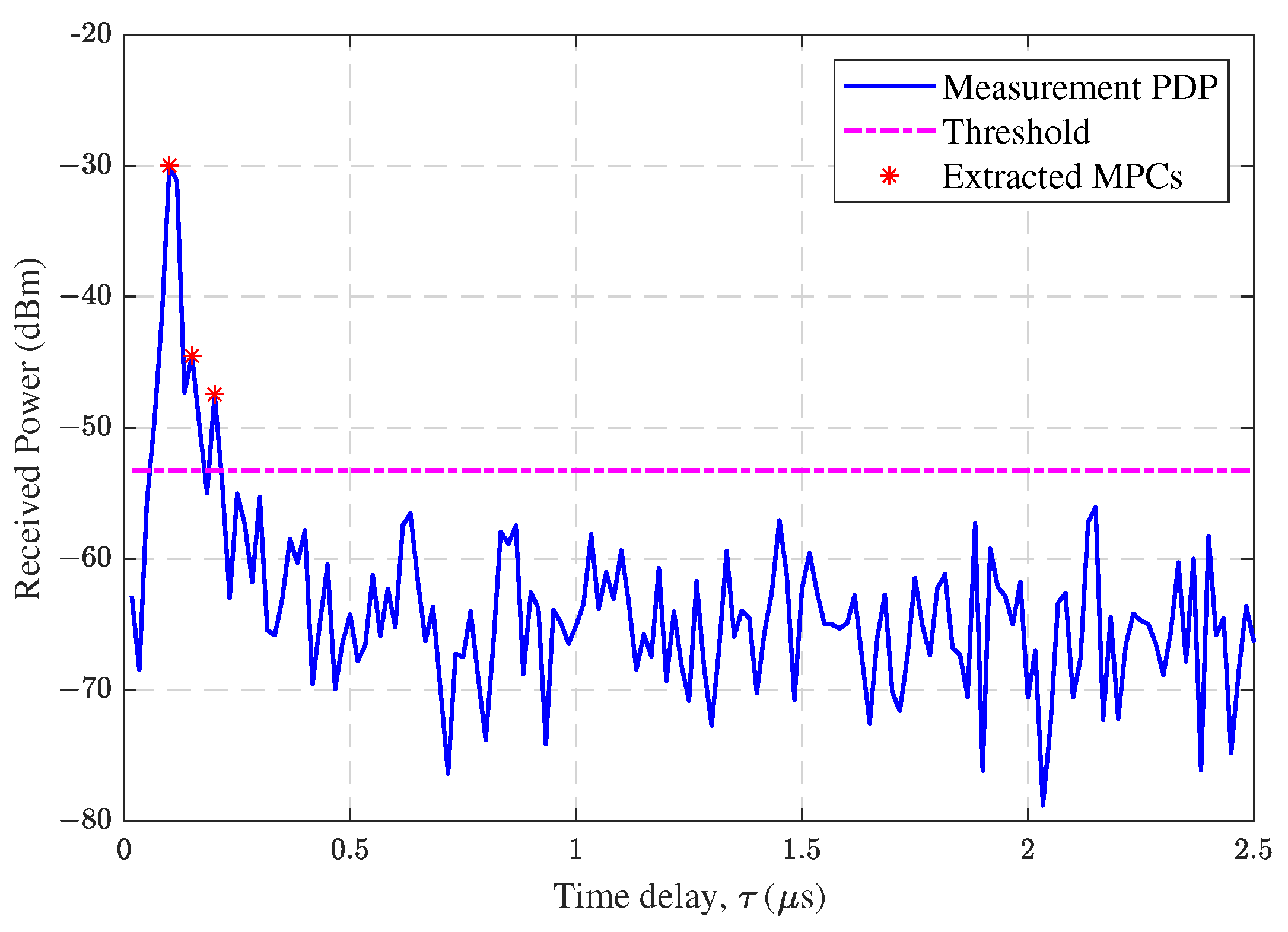
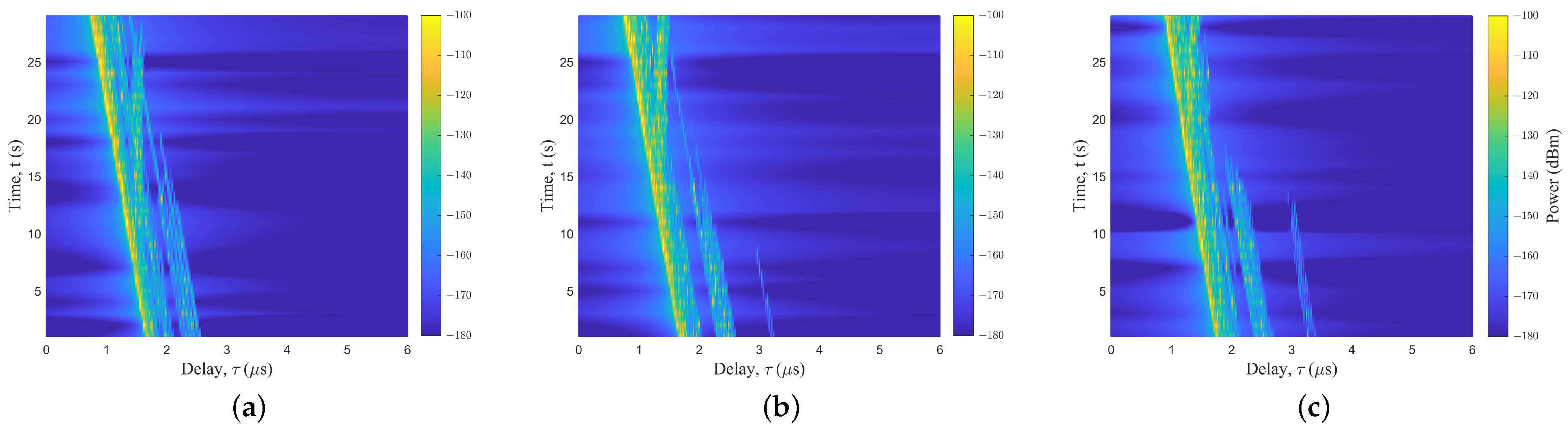
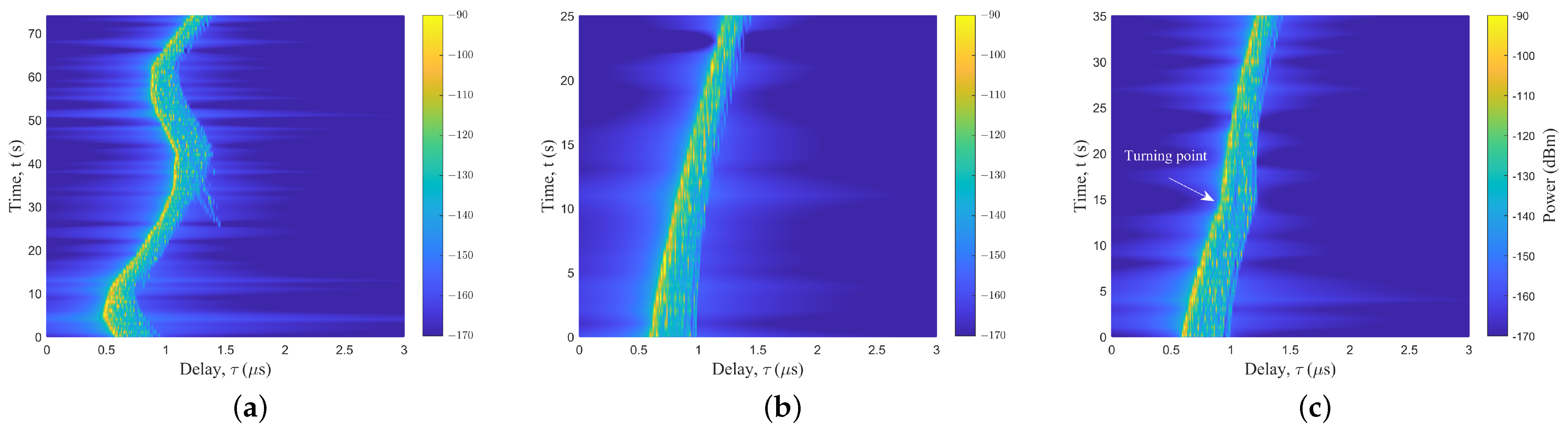
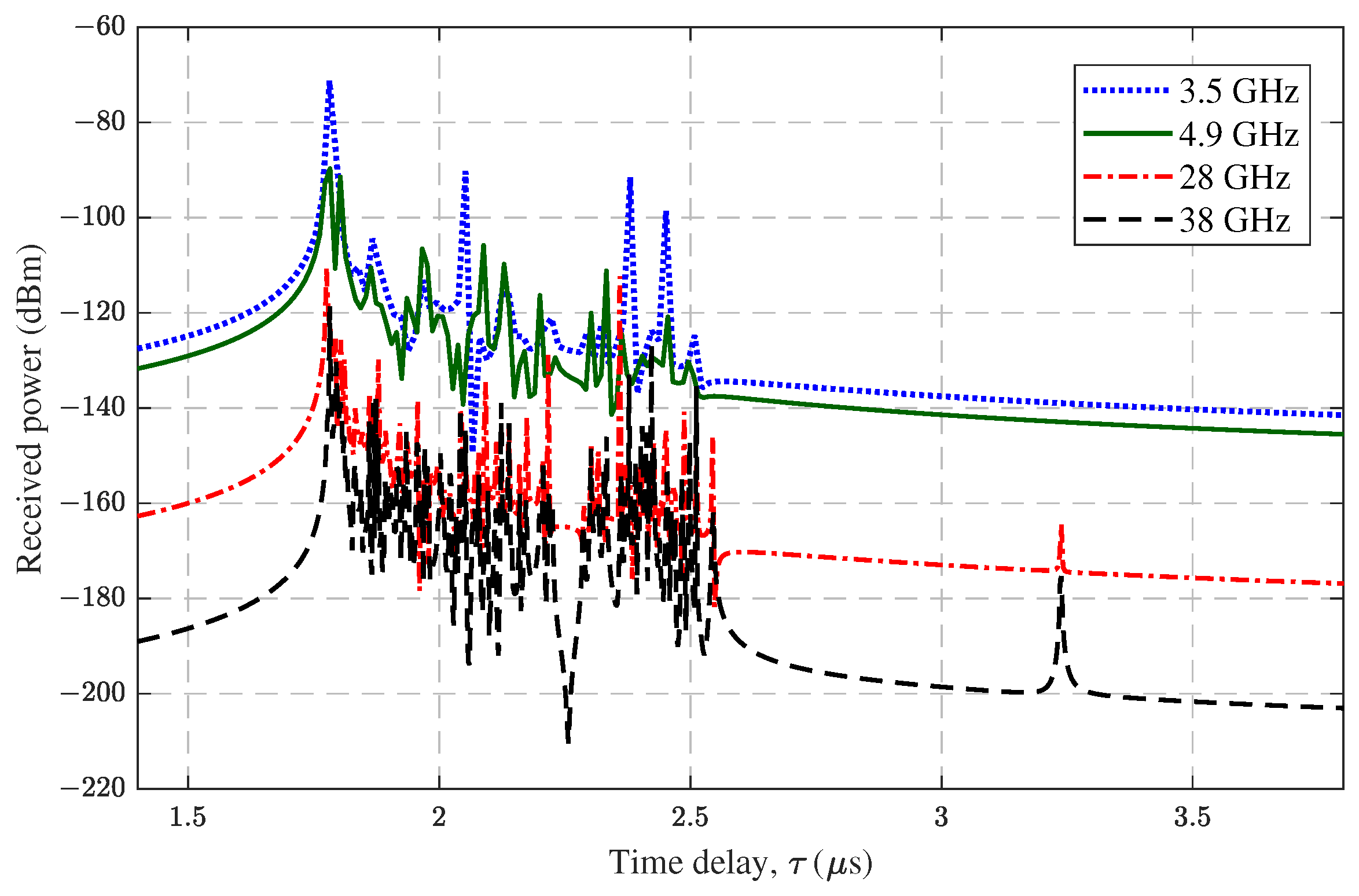
3.2.1. Power Delay Profile
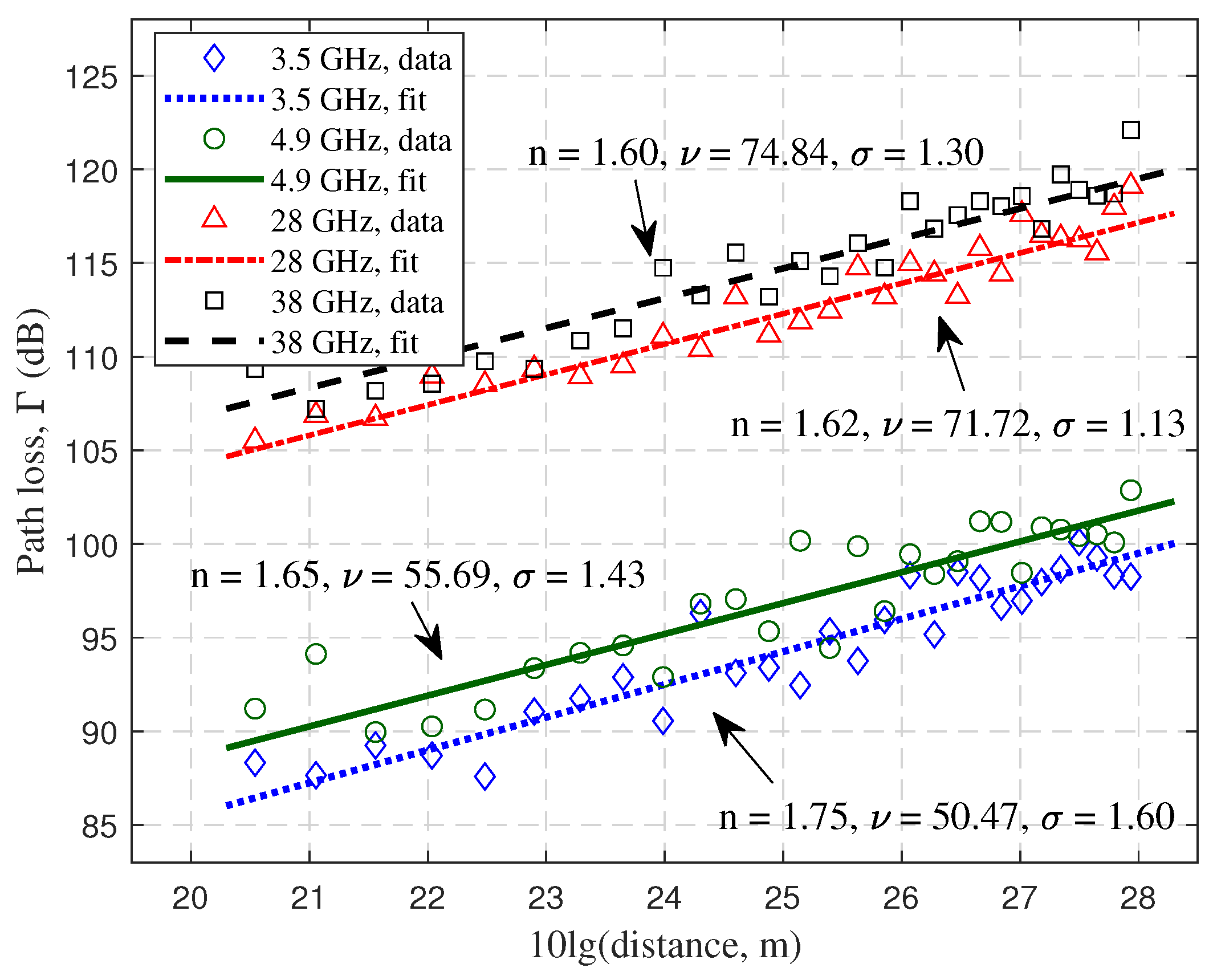
3.2.2. Path Loss and Shadow Fading
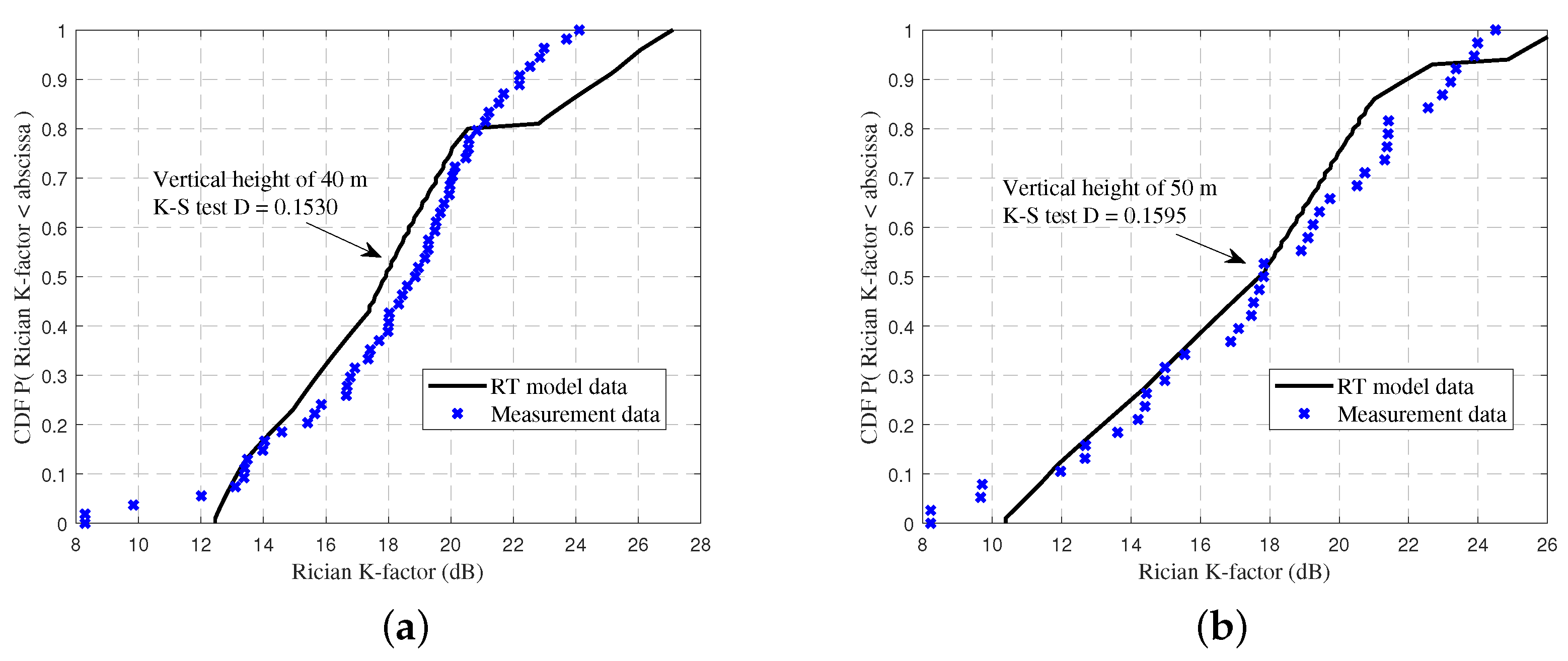
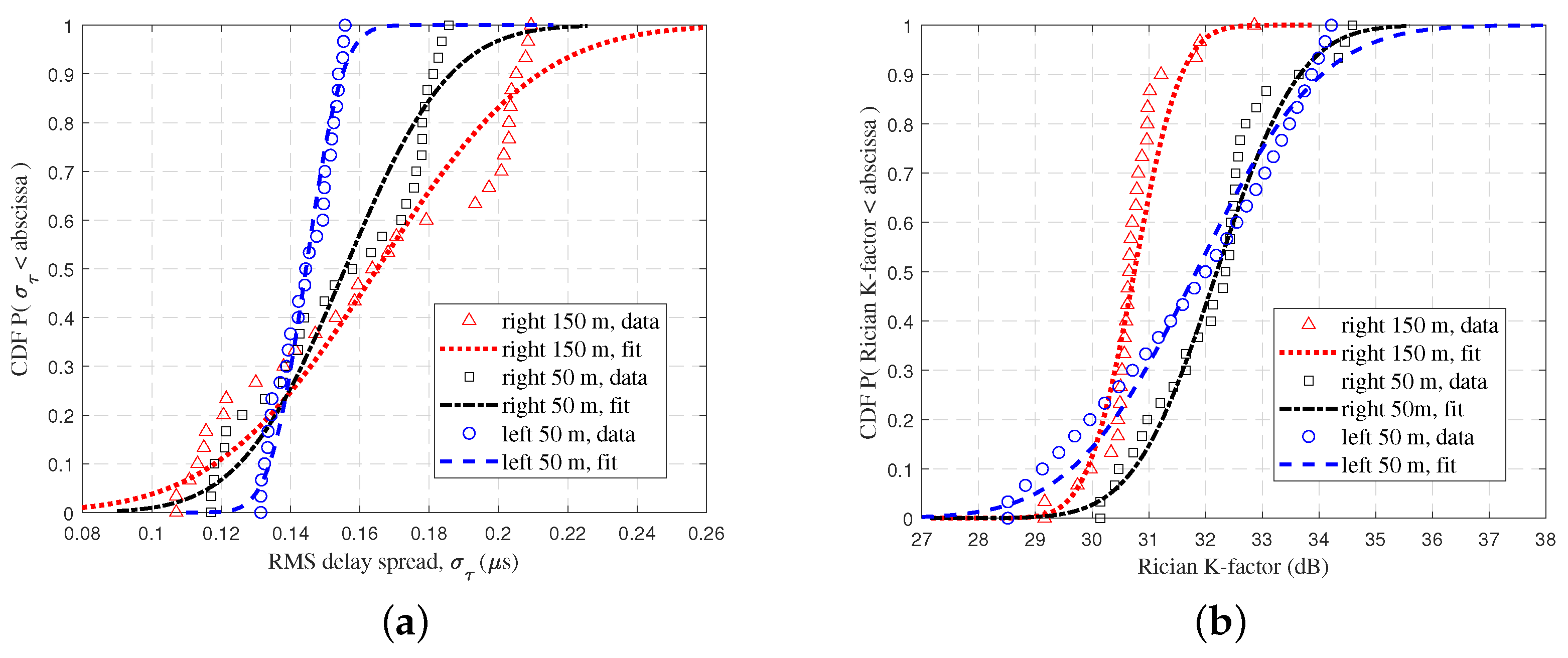
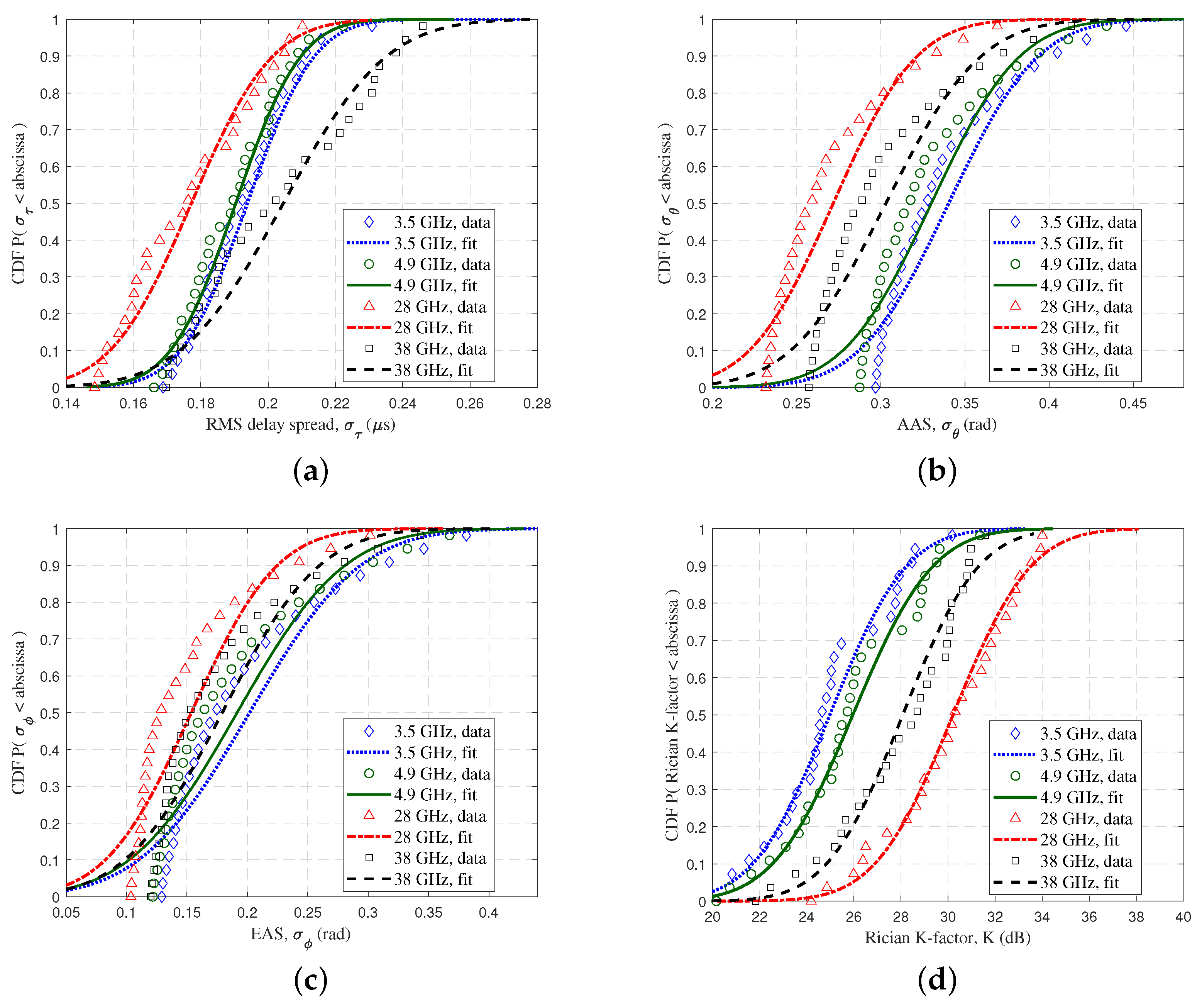
3.2.3. Rician K-Factor
3.2.4. The Delay Spread and Angular Spread
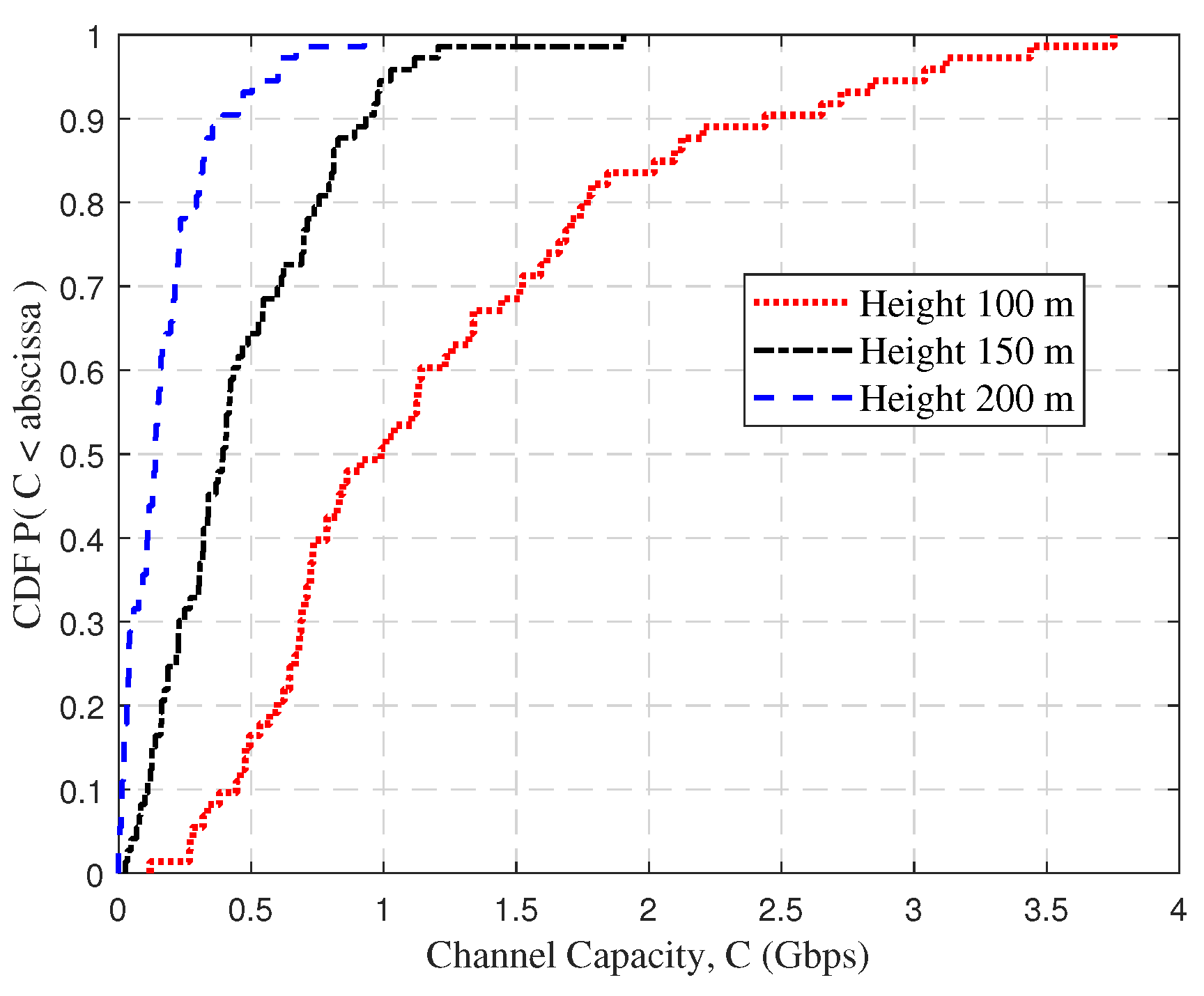
3.2.5. Channel Capacity
4. Numerical Results and Analysis
4.1. Measurement Verification
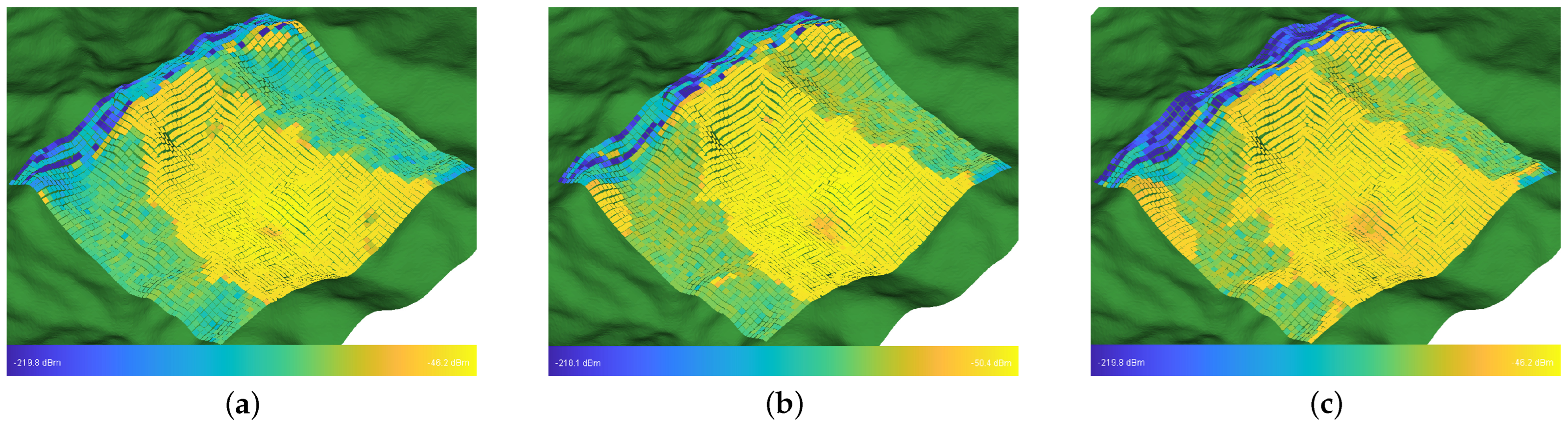
4.2. Different UAV Flight Positions
4.3. Different UAV Flight Trajectories and Altitudes
4.4. Different UAV Carrier Frequency Bands
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, C.X.; You, X.; Gao, X.; Zhu, X.; Li, Z.; Zhang, C.; Wang, H.; Huang, Y.; Chen, Y.; Haas, H.; et al. On the road to 6G: Visions, requirements, key technologies and testbeds. IEEE Commun. Surv. Tutor. 2023. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Champagne, B.; Zhu, W.P.; Al-Dhahir, N. Secrecy-energy efficient hybrid beamforming for satellite-terrestrial integrated networks. IEEE Trans. Commun. 2021, 69, 6345–6360. [Google Scholar] [CrossRef]
- Lin, Z.; Niu, H.; An, K.; Wang, Y.; Zheng, G.; Chatzinotas, S.; Hu, Y. Refracting RIS-aided hybrid satellite-terrestrial relay networks: Joint beamforming design and optimization. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3717–3724. [Google Scholar] [CrossRef]
- Zeng, Y.; Zhang, R.; Lim, T.J. Wireless communications with unmanned aerial vehicles: Opportunities and challenges. IEEE Commun. Mag. 2016, 54, 36–42. [Google Scholar] [CrossRef]
- Hayat, S.; Yanmaz, E.; Muzaffar, R. Survey on unmanned aerial vehicle networks for civil applications: A communications viewpoint. IEEE Commun. Surv. Tutor. 2016, 18, 2624–2661. [Google Scholar] [CrossRef]
- Zhao, N.; Lu, W.; Sheng, M.; Chen, Y.; Tang, J.; Yu, F.R.; Wong, K.K. UAV-assisted emergency networks in disasters. IEEE Wireless Commun. 2019, 26, 45–51. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Wang, J.B.; de Cola, T.; Wang, J. Joint beamforming and power allocation for satellite-terrestrial integrated networks with non-orthogonal multiple access. IEEE J. Sel. Top. Signal Process. 2019, 13, 657–670. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; de Cola, T.; Wang, J.B.; Zhu, W.P.; Cheng, J. Supporting IoT with rate-splitting multiple access in satellite and aerial-integrated networks. IEEE Int. Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- Wang, C.X.; Bian, J.; Sun, J.; Zhang, W.; Zhang, M. A survey of 5G channel measurements and models. IEEE Commun. Surv. Tutor. 2018, 20, 3142–3168. [Google Scholar] [CrossRef]
- Wang, C.X.; Lv, Z.; Gao, X.; You, X.; Hao, Y.; Haas, H. Pervasive wireless channel modeling theory and applications to 6G GBSMs for all frequency bands and all scenarios. IEEE Trans. Veh. Technol. 2022, 71, 9159–9173. [Google Scholar] [CrossRef]
- Zhou, T.; Tao, C.; Salous, S.; Liu, L. Measurements and analysis of angular characteristics and spatial correlation for high-speed railway channels. IEEE Trans. Intell. Transp. Syst. 2017, 19, 357–367. [Google Scholar] [CrossRef]
- Cai, X.; Rodríguez-Piñeiro, J.; Yin, X.; Wang, N.; Ai, B.; Pedersen, G.F.; Yuste, A.P. An empirical air-to-ground channel model based on passive measurements in LTE. IEEE Trans. Veh. Technol. 2018, 68, 1140–1154. [Google Scholar] [CrossRef]
- Zhou, T.; Lin, Y.; Yang, Z.; Ai, B.; Liu, L. Radio channel measurements and characterization in substation scenarios for power grid Internet of Things. IEEE Int. Things J. 2023, 10, 7691–7704. [Google Scholar] [CrossRef]
- Cheng, X.; Huang, Z.; Chen, S. Vehicular communication channel measurement, modelling, and application for beyond 5G and 6G. IET Commun. 2020, 14, 3303–3311. [Google Scholar] [CrossRef]
- Yu, C.; Liu, Y.; Chang, H.; Zhang, J.; Zhang, M.; Poechmueller, P.; Wang, C. AG channel measurements and characteristics analysis in hilly scenarios for 6G UAV communications. China Commun. 2022, 19, 32–46. [Google Scholar] [CrossRef]
- Cui, Z.; Briso-Rodríguez, C.; Guan, K.; Zhong, Z. Ultra-wideband air-to-ground channel measurements and modeling in hilly environment. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Dublin, Ireland, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Sun, R.; Matolak, D.W. Air–ground channel characterization for unmanned aircraft systems part II: Hilly and mountainous settings. IEEE Trans. Veh. Technol. 2016, 66, 1913–1925. [Google Scholar] [CrossRef]
- Matolak, D.W.; Sun, R. Air–ground channel characterization for unmanned aircraft systems—Part III: The suburban and near-urban environments. IEEE Trans. Veh. Technol. 2017, 66, 6607–6618. [Google Scholar] [CrossRef]
- Geise, R.; Weiss, A.; Neubauer, B. Modulating features of field measurements with a UAV at millimeter wave frequencies. In Proceedings of the 2018 IEEE Conference on Antenna Measurements & Applications (CAMA), Vasteras, Sweden, 3–6 September 2018; pp. 1–4. [Google Scholar]
- Khawaja, W.; Ozdemir, O.; Guvenc, I. UAV air-to-ground channel characterization for mmWave systems. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017; pp. 1–5. [Google Scholar]
- Calvo-Ramírez, C.; Cui, Z.; Briso, C.; Guan, K.; Matolak, D.W. UAV air-ground channel ray tracing simulation validation. In Proceedings of the 2018 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Beijing, China, 16–18 August 2018; pp. 122–125. [Google Scholar]
- Zhu, Q.; Bai, F.; Pang, M.; Li, J.; Zhong, W.; Chen, X.; Mao, K. Geometry-Based stochastic line-of-sight probability model for A2G channels under urban scenarios. IEEE Trans. Antennas Propag. 2022, 70, 5784–5794. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Song, M.; Li, H.; Ning, B.; Pedersen, G.F.; Fan, W. Machine-learning-based 3-D channel modeling for U2V mmWave communications. IEEE Int. Things J. 2022, 9, 17592–17607. [Google Scholar] [CrossRef]
- Jiang, H.; Xiong, B.; Zhang, H.; Basar, E. Physics-based 3D end-to-end modeling for double-RIS assisted non-stationary UAV-to-ground communication channels. IEEE Trans. Commun. 2023. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, C.X.; Chang, H.; He, Y.; Bian, J. A novel non-stationary 6G UAV channel model for maritime communications. IEEE J. Sel. Areas Commun. 2021, 39, 2992–3005. [Google Scholar] [CrossRef]
- Chang, H.; Bian, J.; Wang, C.X.; Bai, Z.; Zhou, W.; Aggoune, e.-H.M. A 3D non-stationary wideband GBSM for low-altitude UAV-to-ground V2V MIMO channels. IEEE Access 2019, 7, 70719–70732. [Google Scholar] [CrossRef]
- Chang, H.; Wang, C.X.; Liu, Y.; Huang, J.; Sun, J.; Zhang, W.; Gao, X. A novel nonstationary 6G UAV-to-ground wireless channel model with 3-D arbitrary trajectory changes. IEEE Int. Things J. 2020, 8, 9865–9877. [Google Scholar] [CrossRef]
- Mao, K.; Zhu, Q.; Song, M.; Hua, B.; Zhong, W.; Ye, X. A geometry-based beamforming channel model for UAV mmWave communications. Sensors 2020, 20, 6957. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, Z.; Wang, C.X.; Zhang, J.; Dang, J.; Wu, L.; Zhang, H. A Novel 3D UAV Channel Model for A2G Communication Environments Using AoD and AoA Estimation Algorithms. IEEE Trans. Commun. 2020, 68, 7232–7246. [Google Scholar] [CrossRef]
- Bai, L.; Huang, Z.; Cui, L.; Feng, T.; Cheng, X. A mixed-bouncing based non-stationary model for 6G massive MIMO mmWave UAV channels. IEEE Trans. Commun. 2022, 70, 7055–7069. [Google Scholar] [CrossRef]
- Bai, L.; Huang, Z.; Cheng, X. A non-stationary model with time-space consistency for 6G massive MIMO mmWave UAV channels. IEEE Trans. Wireless Commun. 2023, 22, 2048–2064. [Google Scholar] [CrossRef]
- Hua, B.; Ni, H.; Zhu, Q.; Wang, C.X.; Zhou, T.; Mao, K.; Bao, J.; Zhang, X. Channel modeling for UAV-to-ground communications with posture variation and fuselage scattering effect. IEEE Trans. Commun. 2023, 71, 3103–3116. [Google Scholar] [CrossRef]
- Cui, Z.; Guan, K.; He, D.; Ai, B.; Zhong, Z. Propagation modeling for UAV air-to-ground channel over the simple mountain terrain. In Proceedings of the 2019 IEEE International Conference on Communications Workshops (ICC Workshops), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- 3GPP. Study on Enhanced LTE Support for Aerial Vehicles (Release 15); v15.0.0; TR 36.777 V1.0.0; 3GPP, Technical Report; 3GPP Mobile Competence Centre: Sophia Antipolis, France, 2017. [Google Scholar]
- Remcom. Wireless InSite. Available online: https://www.remcom.com/wireless-insite-em-propagation-software (accessed on 1 January 2023).
- USGS. Global Land Cover Characteristics. Available online: https://www.usgs.gov/media/images/global-land-cover-characteristics-data-base-version-20 (accessed on 1 November 2022).
- Electronic Publication ITU-R. P. 2040-2. Effects of Building Materials and Structures on Radiowave Propagation above about 100 MHz; ITU Recommendations, Technical Report; Electronic Publication: Geneva, Switzerland, 2021. [Google Scholar]
- Zhang, C.; Sun, J.; Liu, Y.; Zhang, W.; Wang, C.X. Channel characteristics analysis of 60 GHz wireless communications in staircase environments. In Proceedings of the 2020 IEEE/CIC International Conference on Communications in China (ICCC Workshops), Chongqing, China, 9–11 August 2020; pp. 7–12. [Google Scholar]
- Zhang, G.; Cai, X.; Fan, W.; Pedersen, G.F. A USRP-based channel sounder for UAV communications. In Proceedings of the 2020 14th European Conference on Antennas and Propagation (EuCAP), Copenhagen, Denmark, 15–20 March 2020; pp. 1–4. [Google Scholar]
- Miller, L.H. Table of Percentage Points of Kolmogorov Statistics. J. Am. Stat. Assoc. 1956, 51, 111–121. [Google Scholar] [CrossRef]
- Electronic Publication ITU-R. P. 838-3. Specific Attenuation Model for Rain for Use in Prediction Methods; ITU Recommendations, Technical Report; Electronic Publication: Geneva, Switzerland, 2005. [Google Scholar]
- Electronic Publication ITU-R. P. 530-17. Propagation Data and Prediction Methods Required for the Design of Terrestrial Line-of-Sight Systems; ITU Recommendations, Technical Report; Electronic Publication: Geneva, Switzerland, 2017. [Google Scholar]
- Guan, K.; He, D.; Ai, B.; Chen, Y.; Han, C.; Peng, B.; Zhong, Z.; Kuerner, T. Channel characterization and capacity analysis for THz communication enabled smart rail mobility. IEEE Trans. Veh. Technol. 2021, 70, 4065–4080. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3.5 GHz | 4.9 GHz | 28 GHz | 38 GHz | |
|---|---|---|---|---|
| Permittivity | 18.18 | 15.76 | 5.70 | 4.80 |
| Conductivity (S/m) | 0.76 | 1.22 | 9.50 | 22.00 |
| Thickness (m) | 0.00 | 0.00 | 0.00 | 0.00 |
| Research Subjects | I | II | III |
|---|---|---|---|
| Frequency | 28 GHz | 28 GHz | - |
| Bandwidth | 1000 MHz | 1000 MHz | - |
| Transmit Power | 40 dBm | 40 dBm | 40 dBm |
| Flight Altitude | 65 m | - | 75 m |
| Flight Trajectory | Straight line | - | Straight line |
| Flight Speed | 10 m/s | 10 m/s | 10 m/s |
| Flight Distance | 300 m | - | 550 m |
| Antenna Pattern | Omnidirectional | Omnidirectional | Omnidirectional |
| Antenna Max Gain | 8 dBi | 8 dBi | 8 dBi |
| Waveform | Sinusoid | Sinusoid | Sinusoid |
| Polarization | Vertical | Vertical | Vertical |
| Ray Spacing | 0.25 | 0.25 | 0.25 |
| Reflection/Diffraction /Transmission | 6/1/0 | 6/1/0 | 6/1/0 |
| 3.5 GHz | 4.9 GHz | 28 GHz | 38 GHz | |
|---|---|---|---|---|
| RMS DS (s) | N (0.1938, 0.0156) | N (0.1904, 0.0152) | N (0.1772, 0.0190) | N(0.2045, 0.0240) |
| AAS (rad) | N (0.3403, 0.0416) | N (0.3300, 0.0411) | N (0.2717, 0.0390) | N(0.3030, 0.0443) |
| EAS (rad) | N (0.2018, 0.0718) | N (0.1914, 0.0698) | N (0.1536, 0.0556) | N (0.1791, 0.0630) |
| Rician K-factor (dB) | N (24.9784, 2.5552) | N (25.9556, 2.6659) | N (30.2080, 2.5964) | N (28.0750, 2.5295) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Liu, Y.; Huang, J.; Zhang, J.; Li, J.; He, R. Channel Characterization and Modeling for 6G UAV-Assisted Emergency Communications in Complicated Mountainous Scenarios. Sensors 2023, 23, 4998. https://doi.org/10.3390/s23114998
Zhang Z, Liu Y, Huang J, Zhang J, Li J, He R. Channel Characterization and Modeling for 6G UAV-Assisted Emergency Communications in Complicated Mountainous Scenarios. Sensors. 2023; 23(11):4998. https://doi.org/10.3390/s23114998
Chicago/Turabian StyleZhang, Zhaolei, Yu Liu, Jie Huang, Jingfan Zhang, Jingquan Li, and Ruisi He. 2023. "Channel Characterization and Modeling for 6G UAV-Assisted Emergency Communications in Complicated Mountainous Scenarios" Sensors 23, no. 11: 4998. https://doi.org/10.3390/s23114998