
The Smart Drifter Cluster: Monitoring Sea Currents and Marine Litter Transport Using Consumer IoT Technologies †
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Development of the Project with Parallel Activities
- Research and development (R&D) of an electronic circuit incorporating GPS, GSM, WiFi, and LPWAN communication functionalities aimed at enhancing the long-range capabilities and energy efficiency of cutting-edge, cost-effective wireless communication technologies. The circuit is designed to be optimized for the specific use case.
- IT for intelligent management of cluster elements and drifter data processing; design of the software that implements the communication strategies among the elements of the drifter cluster and also manages the communication modes (intensity, frequency, synchronizations, data type, etc.).
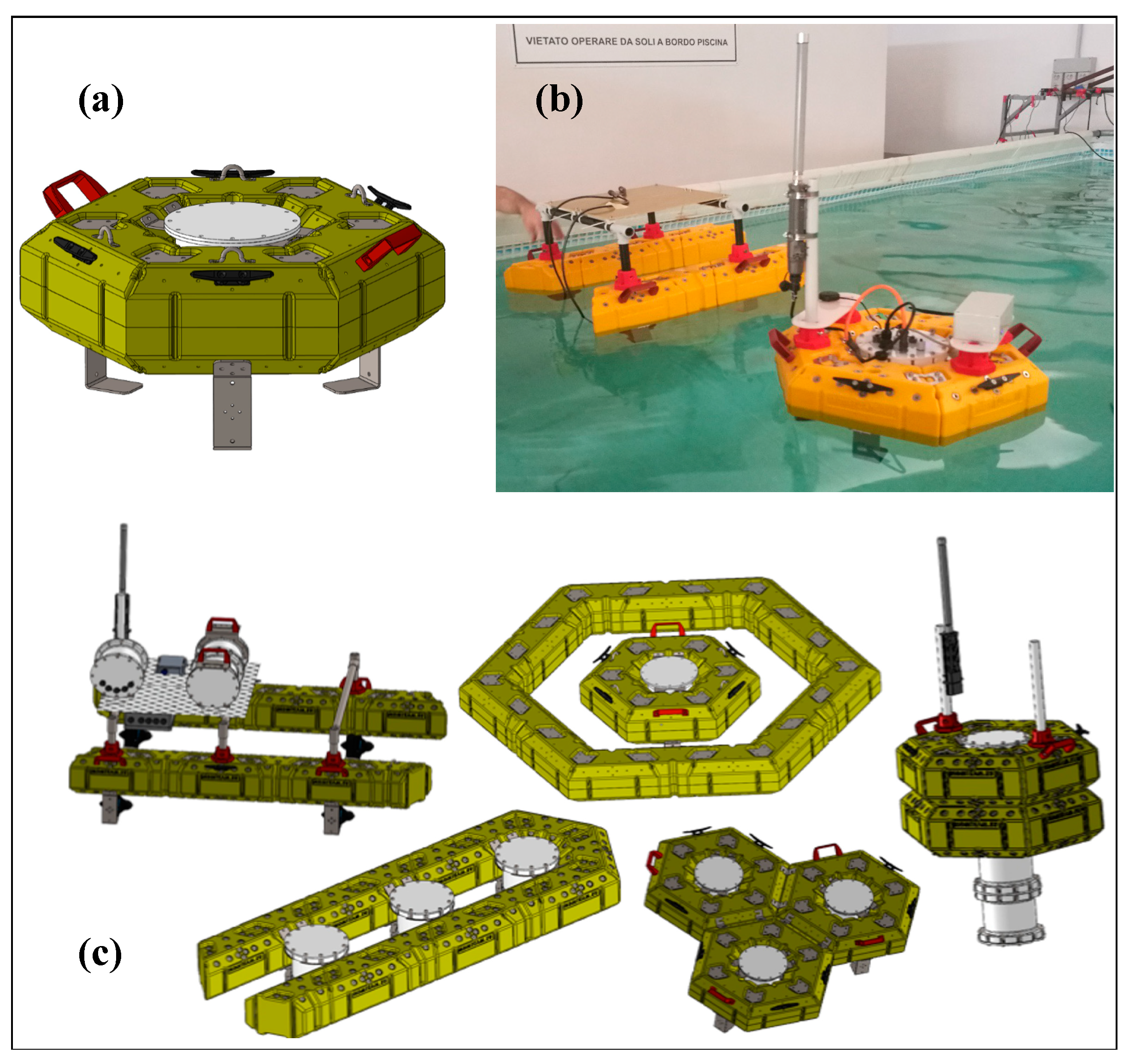
- Testing of different physical housing for the drifter made with materials with a low environmental impact and with the appropriate mechanical characteristics appropriate for the specific use of the drifter (semi-submerged, with floating buoy drag, etc.).
- Design of a propulsion system for the few primary elements to provide a light navigation capacity to maximize data collection from the secondary elements and to maximize long-range communication capabilities.
- IT (with digital twin technology) for the primary elements to forecast long-term motion and future cluster fragmentation and to develop an optimization policy based on the quality and quantity of collected data.
- Energy efficiency and energy harvesting to make the smart drifters virtually energy autonomous.
2.2. Existing Technologies and Materials Used
2.3. Smart Drifter Cluster: Network Architecture
2.4. Concerning the Probes
3. Results
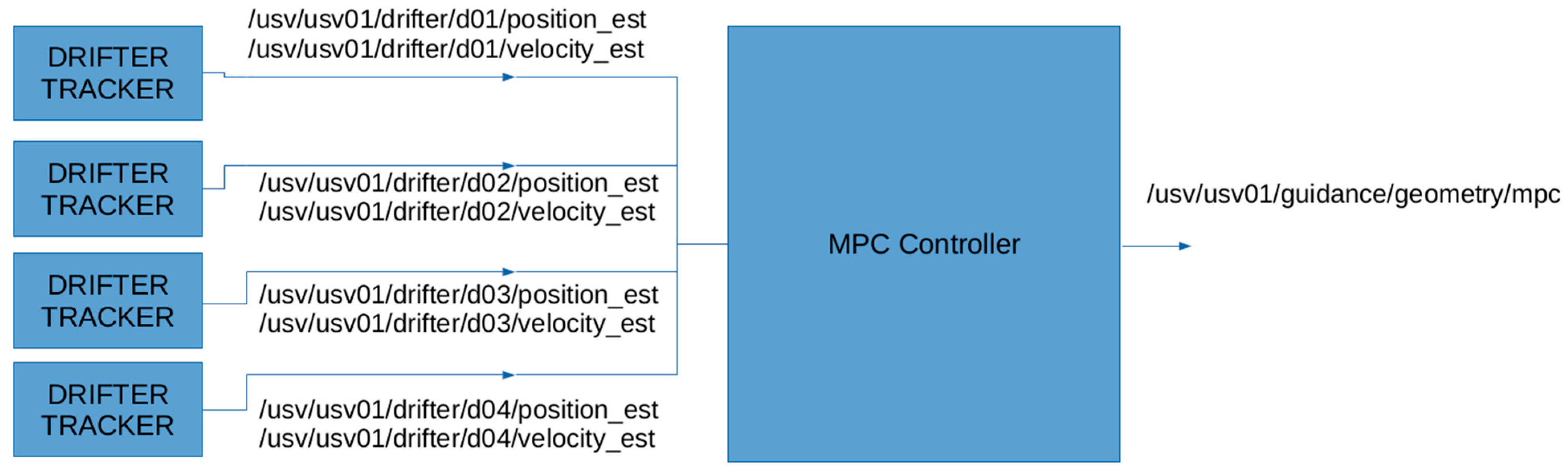
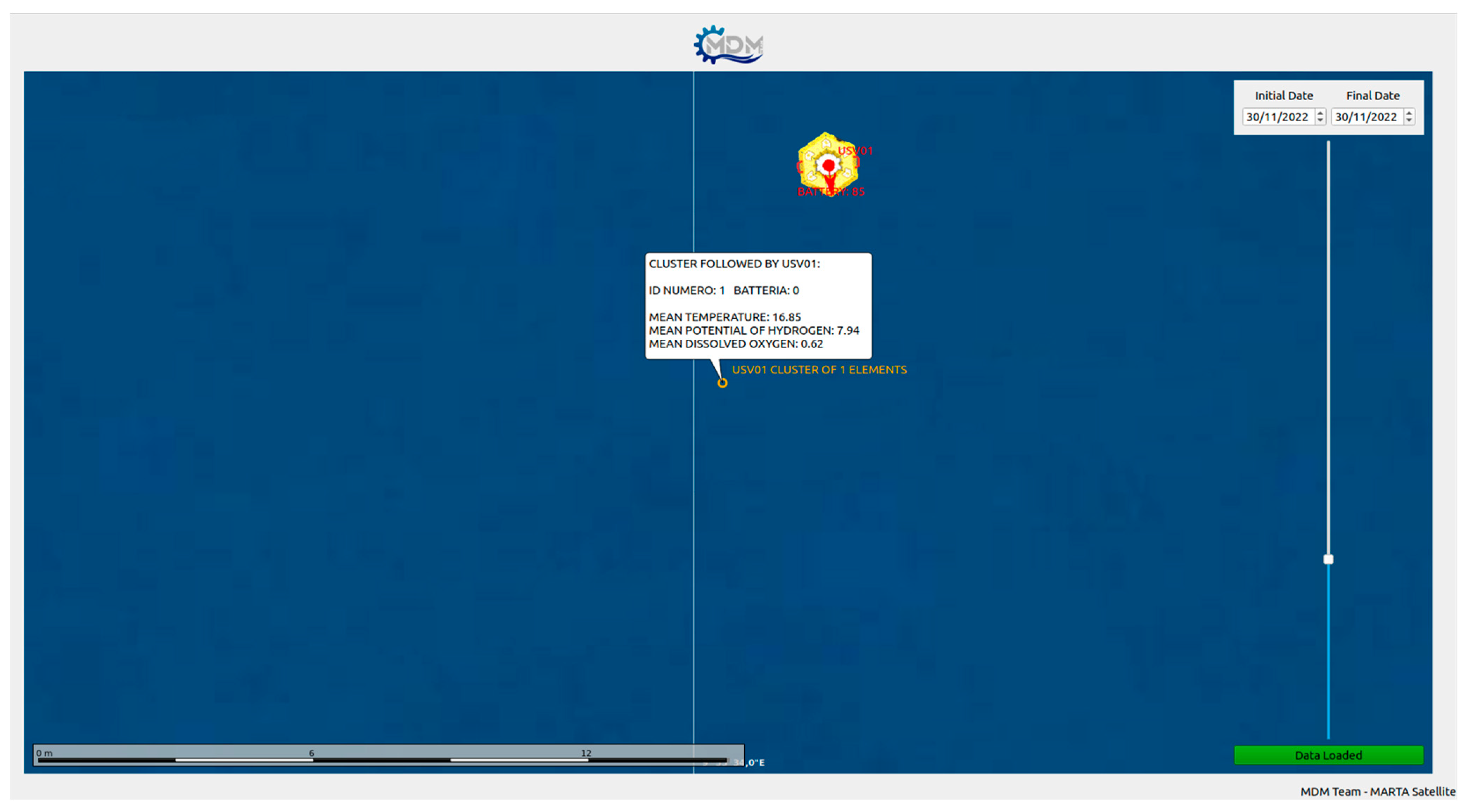
3.1. Software Architecture
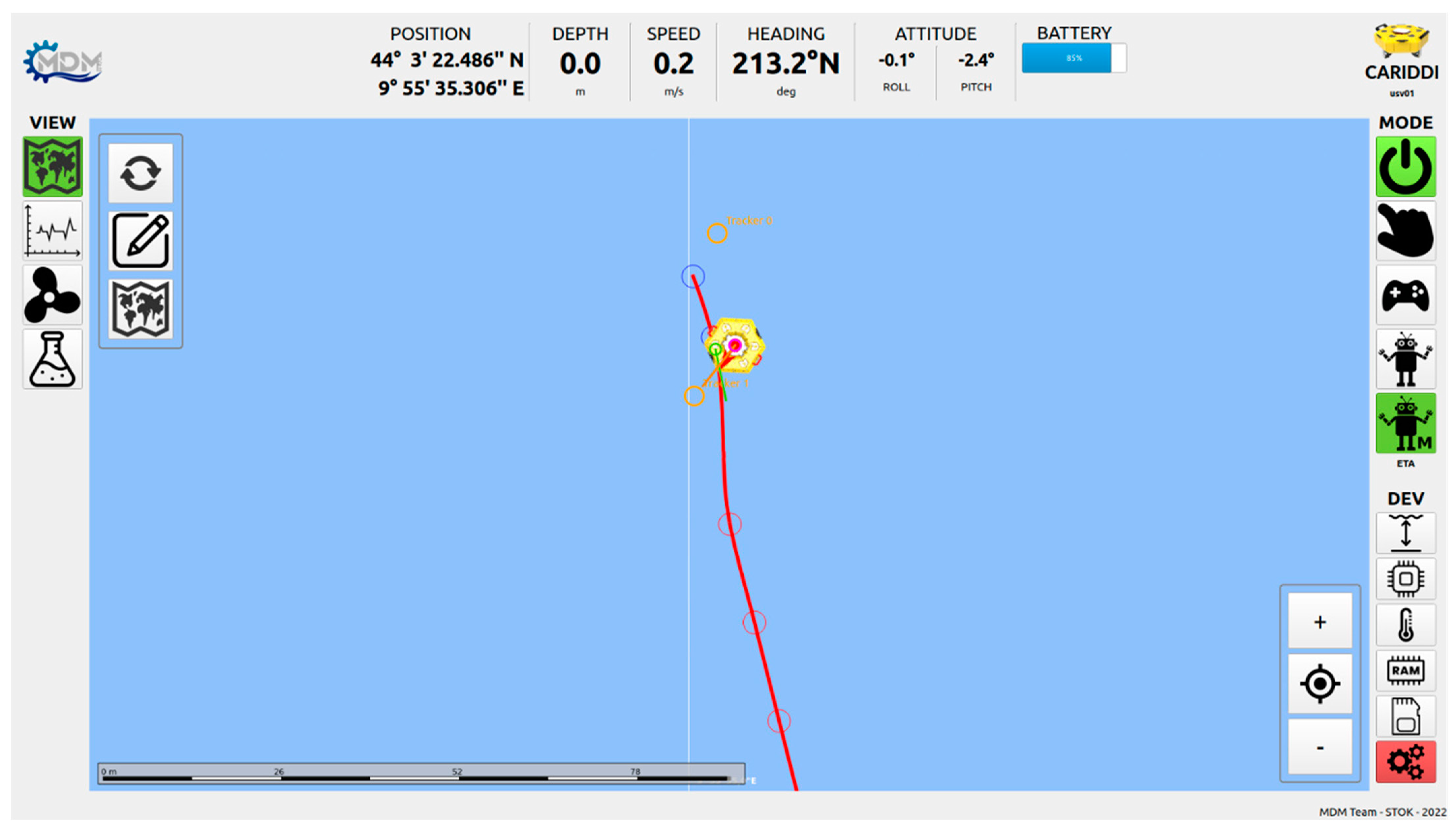
3.2. Tests
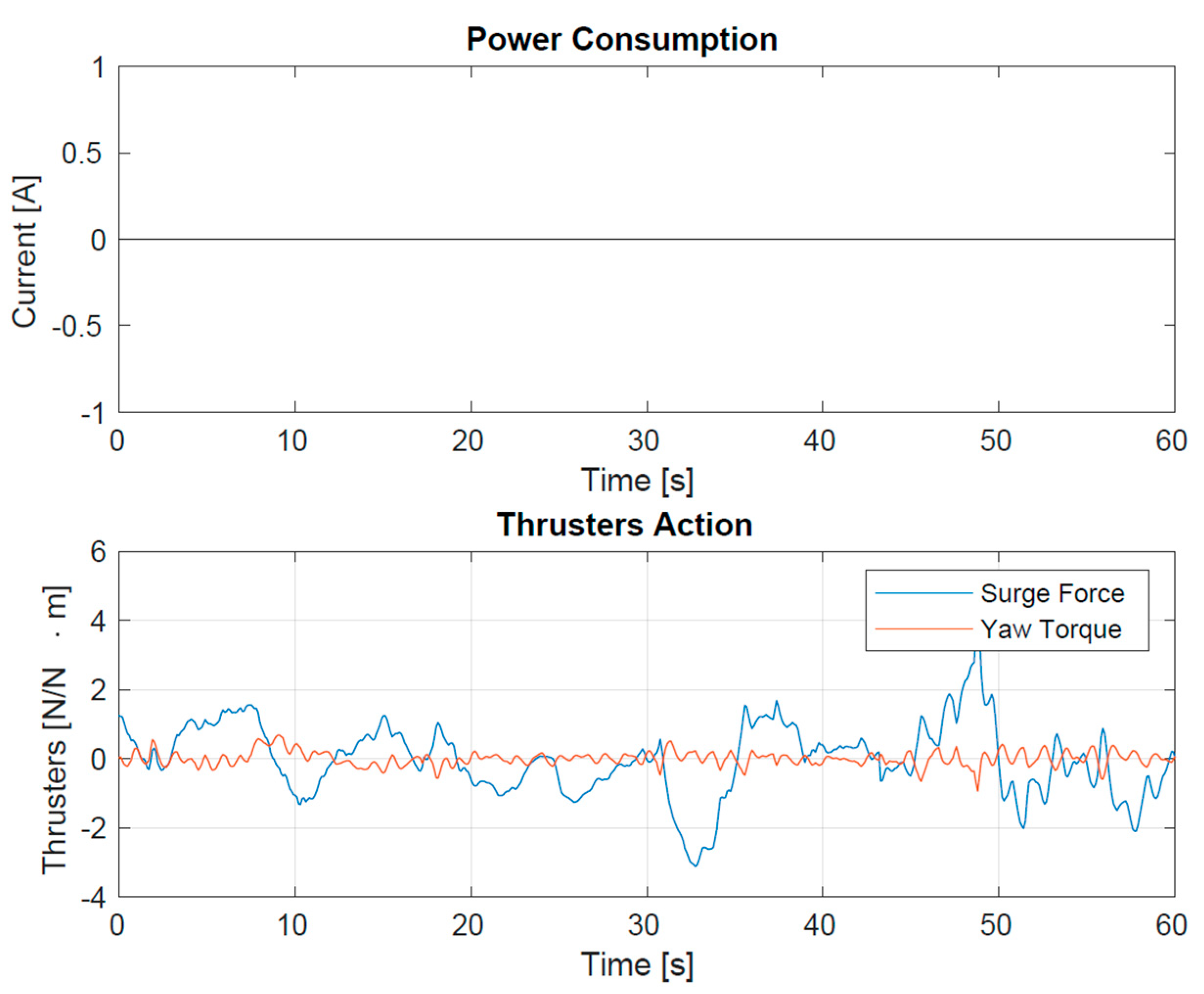
- verify the water tightness and buoyancy of the vehicles, together with the correct functioning of the two thrusters.
- fine-tune the parameters for the motion estimator, the motion controller, and the guidance law modules responsible for the autonomous following of generic trajectories.
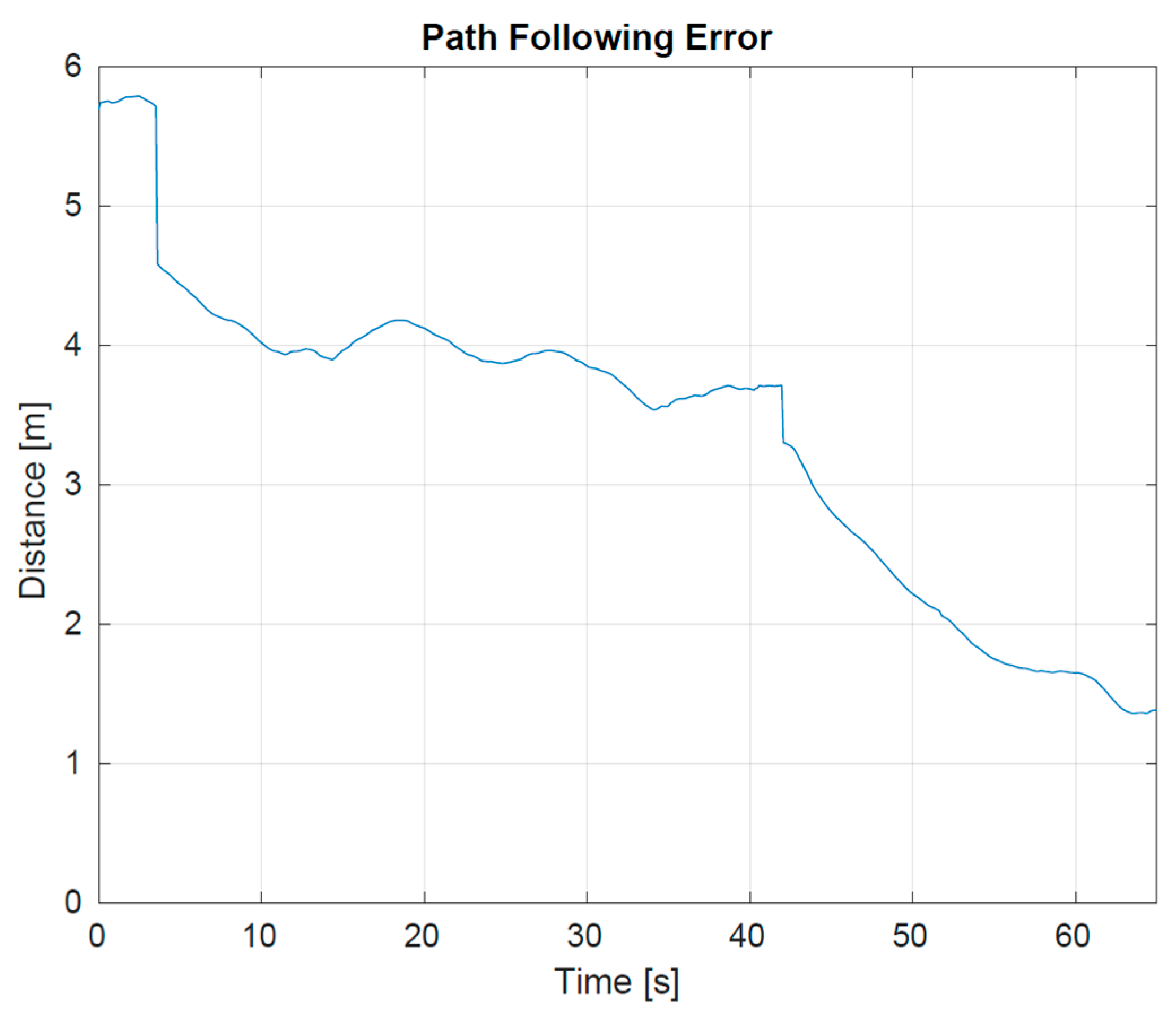
- prescribe a batch of trajectories and verify the ability of the vehicle to follow them. In particular, the path-following error, defined as the error between the geodetic position of the vehicle and the desired geodetic position on the path, had to decrease over time.
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Poulain, P.M.; Zambianchi, E. Surface circulation in the central Mediterranean Sea as deduced from Lagrangian drifters in the 1990s. Cont. Shelf Res. 2007, 27, 981–1001. [Google Scholar] [CrossRef]
- Poulain, P.M.; Gerin, R.; Mauri, E.; Pennel, R. Wind effects on drogued and undrogued drifters in the eastern Mediterranean. J. Atmos. Ocean. Technol. 2009, 26, 1144–1156. [Google Scholar] [CrossRef]
- Subbaraya, S.; Breitenmoser, A.; Molchanov, A.; Müller, J.; Oberg, C.; Caron, D.A.; Sukhatme, G.S. Circling the Seas: Design of Lagrangian Drifters for Ocean Monitoring. IEEE Robot. Autom. Mag. 2016, 23, 42–53. [Google Scholar] [CrossRef]
- Sybrandy, A.L.; Niiler, P.P. WOCE/TOGA Lagrangian drifter construction manual. In Proceedings of the OCEANS 91: Ocean Technologies and Opportunities in The Pacific for the 90’s, Honolulu HI, USA, 1–3 October 1991. [Google Scholar]
- Davis, R.E. Drifter observations of coastal surface currents during CODE: The method and descriptive view. J. Geophys. Res. 1985, 90, 4741–4755. [Google Scholar] [CrossRef]
- Davis, R.E.; Dufour, J.S.; Parks, G.J.; Perkins, M.R. Two inexpensive current-following drifters. Scripps Inst. Oceanogr. 1982, 82, 28–54. [Google Scholar]
- Novelli, G.; Guigand, C.M.; Cousin, C.; Ryan, E.H.; Laxague, N.J.M.; Dai, H.; Haus, B.K.; Özgökmen, T.M. A Biodegradable Surface Drifter for Ocean Sampling on a Massive Scale. J. Atmos. Ocean. Technol. 2017, 34, 2509–2532. [Google Scholar] [CrossRef]
- Laxague NJ, M.; Özgökmen, T.M.; Haus, B.K.; Novelli, G.; Shcherbina, A.; Sutherland, P.; Guigand, C.M.; Lund, B.; Mehta, S.; Alday, M.; et al. Observations of near-surface current shear help describe oceanic oil and plastic transport: Very near surface current shear. Geophys. Res. Lett. 2018, 45, 245–249. [Google Scholar] [CrossRef] [Green Version]
- Merlino, S.; Locritani, M.; Guarnieri, A.; DelRosso, D.; Bianucci, M.; Paterni, M. Marine Litter Tracking System: A Case Study with Open-Source Technology and a Citizen Science-Based Approach. Sensors 2023, 23, 935. [Google Scholar] [CrossRef] [PubMed]
- Duncan, E.M.; Davies, A.; Brooks, A.; Chowdhury, G.W.; Godley, B.J.; Jambeck, J.; Maddalene, T.; Napper, I.; Nelms, S.E.; Rackstraw, C.; et al. Message in a bottle: Open source technology to track the movement of plastic pollution. PLoS ONE 2020, 15, e0242459. [Google Scholar] [CrossRef] [PubMed]
- Lavrova, O.Y.; Soloviev, D.M.; Strochkov, A.Y.; Nazirova, K.R.; Krayushkin, E.V.; Zhuk, E.V. The Use of Mini-Drifters in Coastal Current Measurements Conducted Concurrently with Satellite Imaging. Atmos. Ocean. Phys. 2020, 56, 1022–1033. [Google Scholar] [CrossRef]
- Nasello, C.; Armenio, V. A New Small Drifter for Shallow Water Basins: Application to the Study of Surface Currents in the Muggia Bay (Italy). J. Sens. 2016, 2016, 6589636. [Google Scholar] [CrossRef] [Green Version]
- Ohlmann, J.C.; White, P.F.; Sybrandy, A.L.; Niiler, P.P. GPS–Cellular Drifter Technology for Coastal Ocean Observing Systems. J. Atmos. Ocean. Technol. 2005, 22, 1381–1388. [Google Scholar] [CrossRef]
- AtlasScientific. Environmental Robotics. Available online: https://atlas-scientific.com/ (accessed on 10 May 2023).
- Farouki, R.T. Pythagorean–Hodograph Curves: Algebra and Geometry Inseparable; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Farouki, R.T.; Giannelli, C.; Manni, C.; Sestini, A. Identification of spatial PH quintic Hermite interpolants with near–optimal shape measures. Comput. Aided Geom. Des. 2008, 25, 274–297. [Google Scholar] [CrossRef]
- De Monte, C.; Locritani, M.; Merlino, S.; Ricci, L.; Pistolesi, A.; Bronco, S. An In Situ Experiment to Evaluate the Aging and Degradation Phenomena Induced by Marine Environment Conditions on Commercial Plastic Granules. Polymers 2022, 14, 1111. [Google Scholar] [CrossRef]
- Cocciaro, B.; Merlino, S.; Bianucci, M.; Casani, C.; Palleschi, V. Feasibility Study for the Development of a Low-Cost, Compact, and Fast Sensor for the Detection and Classification of Microplastics in the Marine Environment. Sensors 2023, 23, 4097. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optimized Sensing range | 0–45 °C |
| Accuracy | +/−(0.15 + (0.002 × T)) |
| Resolution | 0.001 °C |
| Calibration | Single Point |
| Data protocol | UART and I2C |
| Operating voltage | 3.3–5.5 V |
| Size (PCB/probe) | 13.97 mm × 20.16 mm/6 mm × 81 cm |
| Weight (PCB) | 1.76 g/40 g |
| Optimized Sensing range | 10–100,000 μS/cm |
| Response Time | 90% in 1 s |
| Accuracy | +/− 2% |
| Resolution | 0.001 |
| Temperature compensation | Yes |
| Calibration | 2 or 3 point |
| Data protocol | UART and I2C |
| Operating voltage | 3.3–5.5 V |
| Size (PCB/probe) | 13.97 mm × 20.16 mm/12 mm × 145.5 mm |
| Weight (PCB/probe) | 1.77 g/43 g |
| Optimized Sensing range | 0.01–100 mg/L |
| Response Time | 0.3 mg/L/per s |
| Accuracy | +/−0.05 mg/L |
| Resolution | 0.001 |
| Calibration | 2 points, ~every year |
| Maintenance | ~18 months |
| Data protocol | UART and I2C |
| Operating voltage | 3.3–5.5 V |
| Size (PCB/probe) | 13.97 mm × 20.16 mm/16.5 mm × 124 mm |
| Weight (PCB/probe) | 1.7 g/52 g |
| Optimized Sensing range | 0–14 |
| Response Time | 95% in 1 s |
| Accuracy | +/−0.002 |
| Resolution | 0.001 |
| Calibration | 1–3 points, ~every year |
| Data protocol | UART and I2C |
| Operating voltage | 3.3–5.5 V |
| Size (PCB/probe) | 13.97 mm × 20.16 mm/12 mm × 150.6 mm |
| Weight (PCB/probe) | 1.76 g/49 g |
| Optimized Sensing range | −2000/+2000 mV |
| Response Time | 95% in 1 s |
| Accuracy | +/−1 mV |
| Resolution | 0.001 |
| Calibration | Single point, ~every year |
| Data protocol | UART and I2C |
| Operating voltage | 3.3–5.5 V |
| Size (PCB/probe) | 13.97 mm × 20.16 mm/12 mm × 150.6 mm |
| Weight (PCB/probe) | 1.86 g/49 g |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Merlino, S.; Calabrò, V.; Giannelli, C.; Marini, L.; Pagliai, M.; Sacco, L.; Bianucci, M. The Smart Drifter Cluster: Monitoring Sea Currents and Marine Litter Transport Using Consumer IoT Technologies. Sensors 2023, 23, 5467. https://doi.org/10.3390/s23125467
Merlino S, Calabrò V, Giannelli C, Marini L, Pagliai M, Sacco L, Bianucci M. The Smart Drifter Cluster: Monitoring Sea Currents and Marine Litter Transport Using Consumer IoT Technologies. Sensors. 2023; 23(12):5467. https://doi.org/10.3390/s23125467
Chicago/Turabian StyleMerlino, Silvia, Vincenzo Calabrò, Carlotta Giannelli, Lorenzo Marini, Marco Pagliai, Lorenzo Sacco, and Marco Bianucci. 2023. "The Smart Drifter Cluster: Monitoring Sea Currents and Marine Litter Transport Using Consumer IoT Technologies" Sensors 23, no. 12: 5467. https://doi.org/10.3390/s23125467