1. Introduction
In recent years, there has been widespread interest in the automation revolution in the industrial, infrastructure, and healthcare fields through the implementation of the Internet of Things (IoT) [
1]. However, available wireless spectrum resources are extremely limited, and the large-scale deployment of IoT devices will greatly exacerbate the shortage of spectrum resources and the problem of interference between devices. A large amount of data shows that the utilization of spectrum in the communication field is not high, and many authorized spectrums are not fully utilized, resulting in a huge waste of spectrum resources [
2]. To address these challenges, Cognitive Radio (CR) provides an effective solution. In a CR system, Secondary Users (SUs) can access the authorized spectrum of Primary Users (PUs) with little impact on the PUs. Applying CR technology to IoT networks can effectively improve their spectrum utilization efficiency. Therefore, the design and optimization of Cognitive IoT (CIoT) networks based on CR have received considerable attention [
3].
Spectrum sensing is a key technology in CR to address the problem of insufficient spectrum resources by reusing underutilized spectrum. However, the detection performance of spectrum sensing may deteriorate significantly due to uncertainties such as noise and channel conditions [
4]. Cooperative Spectrum Sensing (CSS) can improve the sensing performance of fading and shadowed channels by combining the results of multiple SUs’ global sensing [
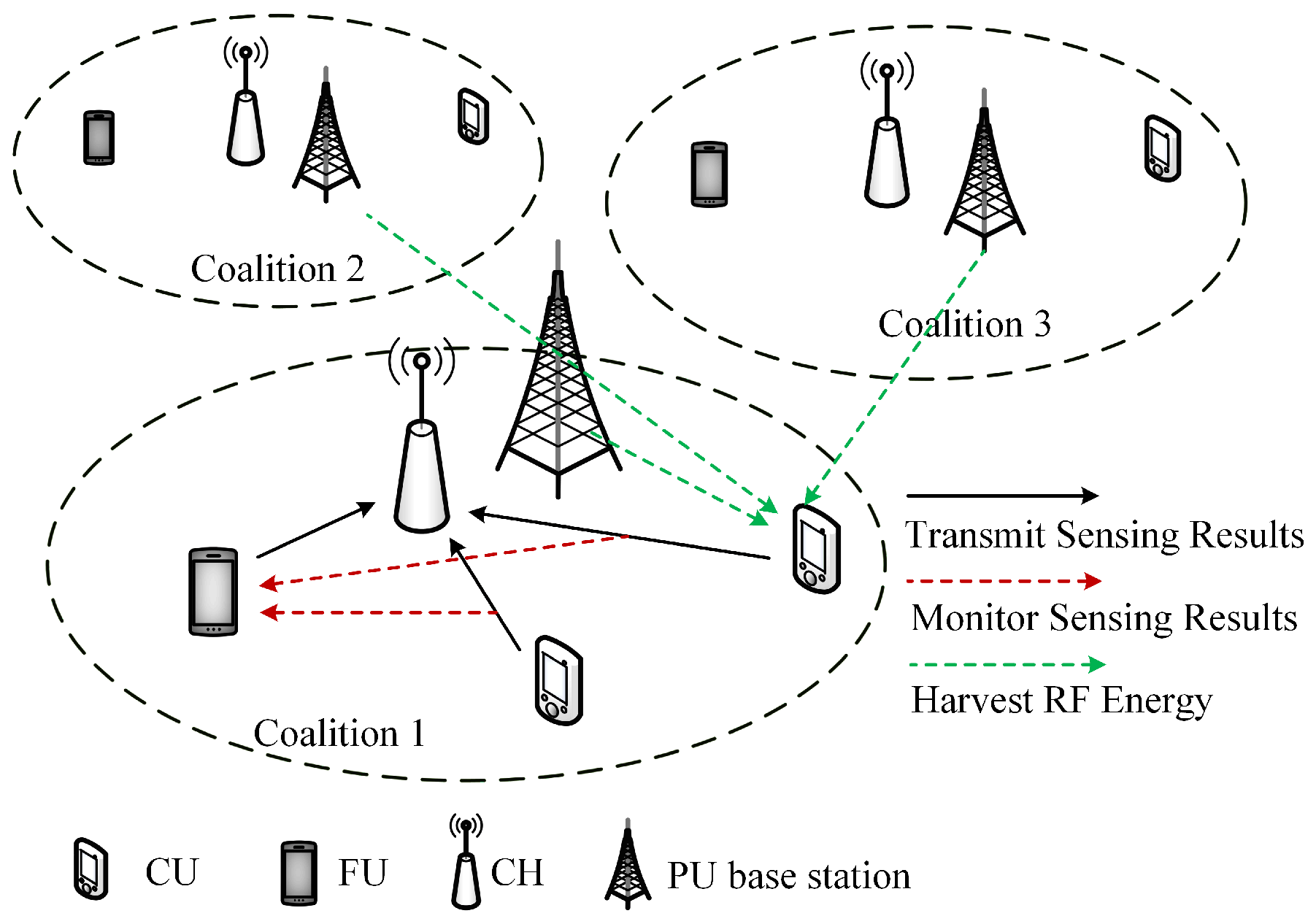
5]. Specifically, due to factors such as obstruction, SUs may be located in the shadow of PU transmission signals and unable to detect their signals, which results in interference with PU’s communication. CSS can effectively address the hidden terminal problem by allowing multiple SUs to cooperate and greatly reducing the impact of shadowed areas on sensing. Furthermore, dynamic spectrum access can greatly improve the spectrum utilization efficiency between SUs and PUs [
6]. Dynamic spectrum access technology allows SUs to effectively utilize spectrum resources by “leasing” or “sharing” idle spectrum resources, improving spectrum utilization, and also having significant advantages in fairness and efficiency. This technology can be used either in the overlay mode, where the SUs opportunistically utilize the unused spectrum of the PUs, or in the underlay mode, where both PUs and SUs transmit simultaneously under SINR constraints in the same frequency band [
7].
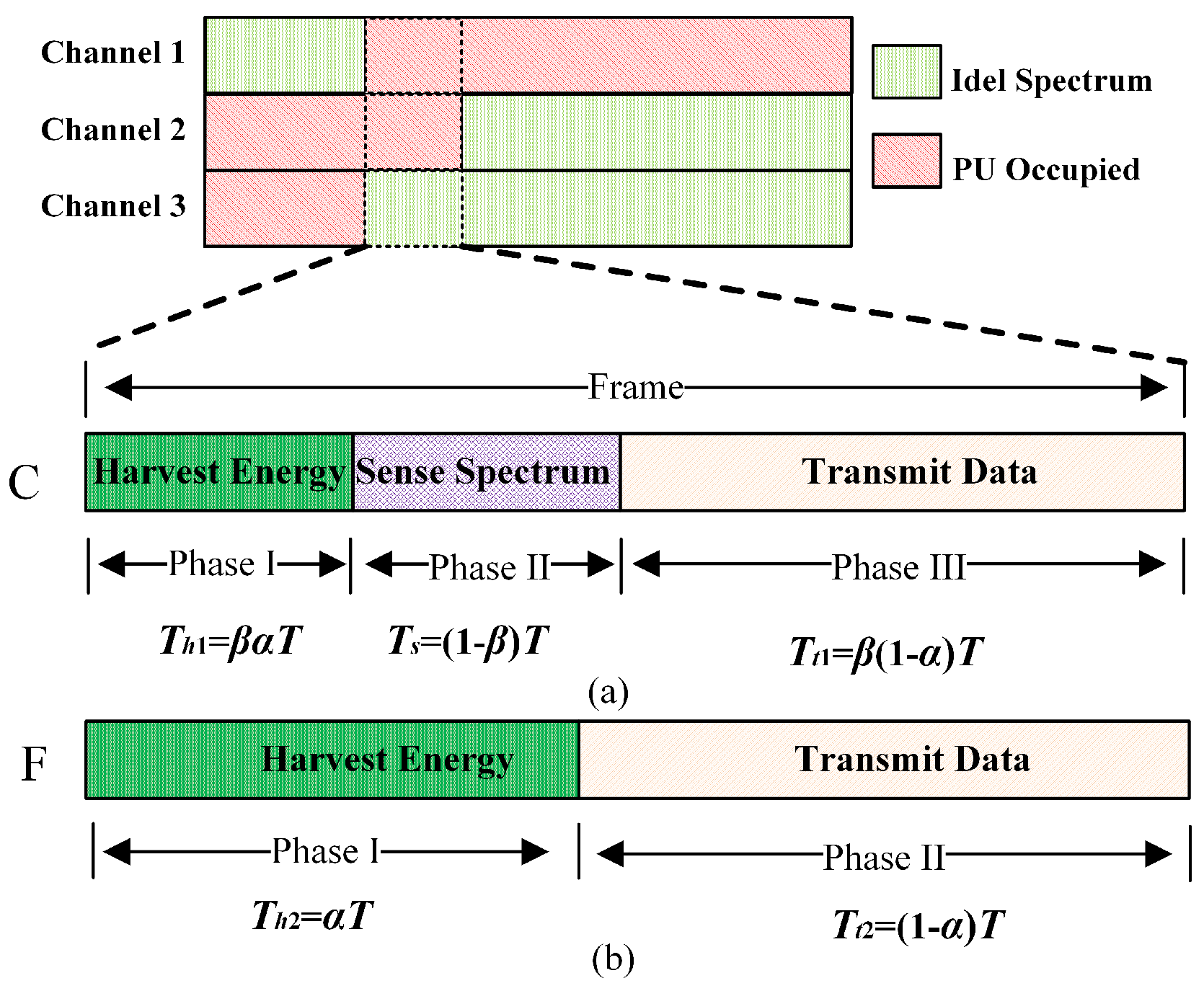
Due to the limited battery capacity of IoT devices, it is difficult for them to run for a long time. Energy Harvesting (EH) allows devices to harvest energy from the environment to refill batteries [
8]. For any type of energy source, the amount of energy transferred from the energy source to the energy harvester is not deterministic but random. Collecting energy through Radio Frequency (RF) signals can avoid the influence of harsh environments and light, and compared with solar energy and wind energy, the energy harvesting process is more stable. Therefore, RF EH technology has become an important direction for researchers to study the energy efficiency of CIoT [
9]. However, since selfish SUs can harvest more energy for system consumption by free-riding during spectrum sensing slots, the application of EH will exacerbate the free-riding behavior of selfish SUs, leading to degraded system detection performance. Therefore, the application of EH technology needs to consider how to deal with the free-riding problem to ensure more stable and reliable system performance.
In recent years, people have been more committed to developing distributed intelligent collaboration systems due to reasons of scalability and high performance [
10]. These systems consist of distributed processing nodes with autonomous learning capabilities and usually include a large number of free-riding nodes [
11]. However, these free-riding nodes will result in fewer nodes providing resources, and the entire system will face the problem of insufficient utilization of resources, and the purpose of sharing will gradually disappear. In CSS, SUs report their sensing results to the FC by control channel and the final channel state is determined by the FC. However, SUs may be selfish, and they may adopt a free-riding strategy when multiple SUs occupy different sub-bands of a PU’s spectrum and can occasionally overhear the sensing results of other SUs. Free-riders tend to wait for other SUs to sense them first and take advantage of other SUs’ results so that they can reserve more time for their own data transmission. Therefore, due to the existence of free-riding behavior, there are two types of SUs with different sensing attitudes in the system: Contributing Users (CUs) who participate in cooperative sensing and Free-riding Users (FUs) who are dishonest. CUs increase the amount of information, but regardless of how much they contribute, the added information is shared equally among participants. However, if the cost of contribution exceeds the marginal benefit, SUs will be tempted not to contribute. Free-riders severely reduce the fault tolerance and content availability of the peer-to-peer system. In cooperative systems, the key to solving this problem is to establish incentive mechanisms that aim to improve utility by incentivizing nodes to become more cooperative. Ref. [
12] proposed a game-theoretic framework for participating in cooperation and free-riding in federated learning to support spectrum sensing for NextG communications.
2. Relate Work
Spectrum sensing is the basis and key to achieving spectrum sharing, improving the efficiency of spectrum utilization, and ensuring the security of spectrum resources in CR technology. So far, many papers have applied spectrum sensing technology in IoT field. For the issue of energy efficiency in spectrum sensing, Ref. [
13] investigated how to use spectrum sensing technology to improve the energy efficiency of CIoT networks, and proposed a new two-way information exchange algorithm and optimal transmit power allocation technique to achieve higher dynamic spectrum sensing capability and data throughput. In addition, cooperative spectrum sensing has been studied extensively. Ref. [
14] proposes an integrated CSS and access control model to maximize the throughput of the cognitive industrial IoT by jointly optimizing the sensing time, the number of sensing nodes, and the transmit power of each node. Dynamic spectrum access is an important research direction in CIoT networks. It provides an effective way for existing radio networks to optimize system performance, enhance resource utilization, and improve system reliability. In ref. [
15], the benefits of cooperative communication and cognitive radio networks (CRN) are merged to meet IoT networks’ needs. In this work, the hybrid overlay-underlay CRN is employed to guarantee both SU stability and an acceptable total throughput. In ref. [
16], spectrum aware Ad hoc on-demand distance vector routing protocol is proposed without fixed base stations, aiming to address the routing needs in future IoT environments.
There are now numerous papers focusing on free-riding behavior. In ref. [
17], Adar et al. analyzed the user traffic in the Gnutella system and found that there were a large number of free-riding users in the system, with only about 28% of the users sharing files. To address the problem of the behavior of free-riders in the system, Ref. [
18] proposes a peer-to-peer protocol with adaptive and self-organizing topology to punish malicious peers and free-riders by considering the trustworthiness. In ref. [
19], machine learning based malicious signal detection is employed for cognitive radio networks. In [
20], To enhance cooperation among agents, one of the main goals of the multi-agent system is to solve the possible free-riding problem. To address this problem, the authors propose a novel strategy that allows agents to manipulate the utility of each adversary simultaneously, further promoting mutual cooperation among all agents. Although the above literature has emphasized the users’ free-riding problem, it does not consider the scheduling problem of dynamic spectrum access techniques for SUs to further improve the system’s utility.
Game theory [
21] is an effective tool for analyzing optimal behavior among rational decision makers. Game theory has been widely used in distributed CR networks to effectively improve system performance and to help SUs make better use of spectrum resources. With the increasingly complex interaction behavior of IoT devices [
22], single-layer networks can no longer meet the needs of the system, and the study of multilayer networks has become a key to the development of many fields. To explore the cooperative behavior among rational individuals, researchers have combined complex networks and game theory [
23], which is more helpful to study the interaction behavior problem among users in complex networks. Ref. [
24] explored an important tradeoff of CSS among SUs in cognitive radio networks and proposed a distributed coalition formation game based on genetic algorithms to select the optimal coalition leader to motivate SUs to actively participate. Ref. [
25] proposed a potential game-based spectrum access and power control method to solve the problem of how to achieve optimal throughput in a multibeam cognitive satellite communication network. Furthermore, game theory is also widely applied to solving the free-rider problem. In ref. [
26], the free-riding problem was first modeled as a public goods game. In ref. [
27], the authors considered an evolutionary game model that allows SUs to choose between free-riding and normal sensing strategies.
Although [
12,
26,
27] considered two sensing attitudes of SUs, they did not address the scheduling problem of SUs when sensing multiple PU channels, which did not work well in multi-channel cooperative spectrum sensing. In the case where SUs cooperatively sense multiple PU channels, most SUs may tend to sense the same PU channel due to geographical location and other factors, resulting in a serious shortage of SUs sensing other PU channels, which greatly affects the detection performance. This may lead to a waste of spectrum resources and even affect the normal communication of PUs. Therefore, it is necessary to consider using dynamic spectrum access to solve the scheduling problem of SUs in this case.
Different from past research, this paper focuses on the problem of SUs’ free-riding behavior in Energy Harvesting CIoT (EH-CIoT) networks. A punishment mechanism is established to stimulate SUs to sense the spectrum normally during the sensing process. For the system model with multiple PUs and SUs, a two-layered game-based cooperative spectrum sensing and access method is proposed to dynamically coordinate the strategies of SUs. Simulation results show that the proposed method significantly improves the overall throughput of the system, and the allocation of SUs in the coalition is more fair compared with traditional methods.
The rest of this paper is organized as follows:
Section 3 describes the system model and time slot structure for cooperative spectrum sensing and access and gives the optimization problem modeling of this paper.
Section 4 proposes a two-layer game to solve the proposed problems in
Section 3. In
Section 5, simulation results are presented. Finally, the conclusion is made at last in
Section 6.
4. Two-Layer Cooperative Sensing and Access Game (TL-CSAG)
As shown in
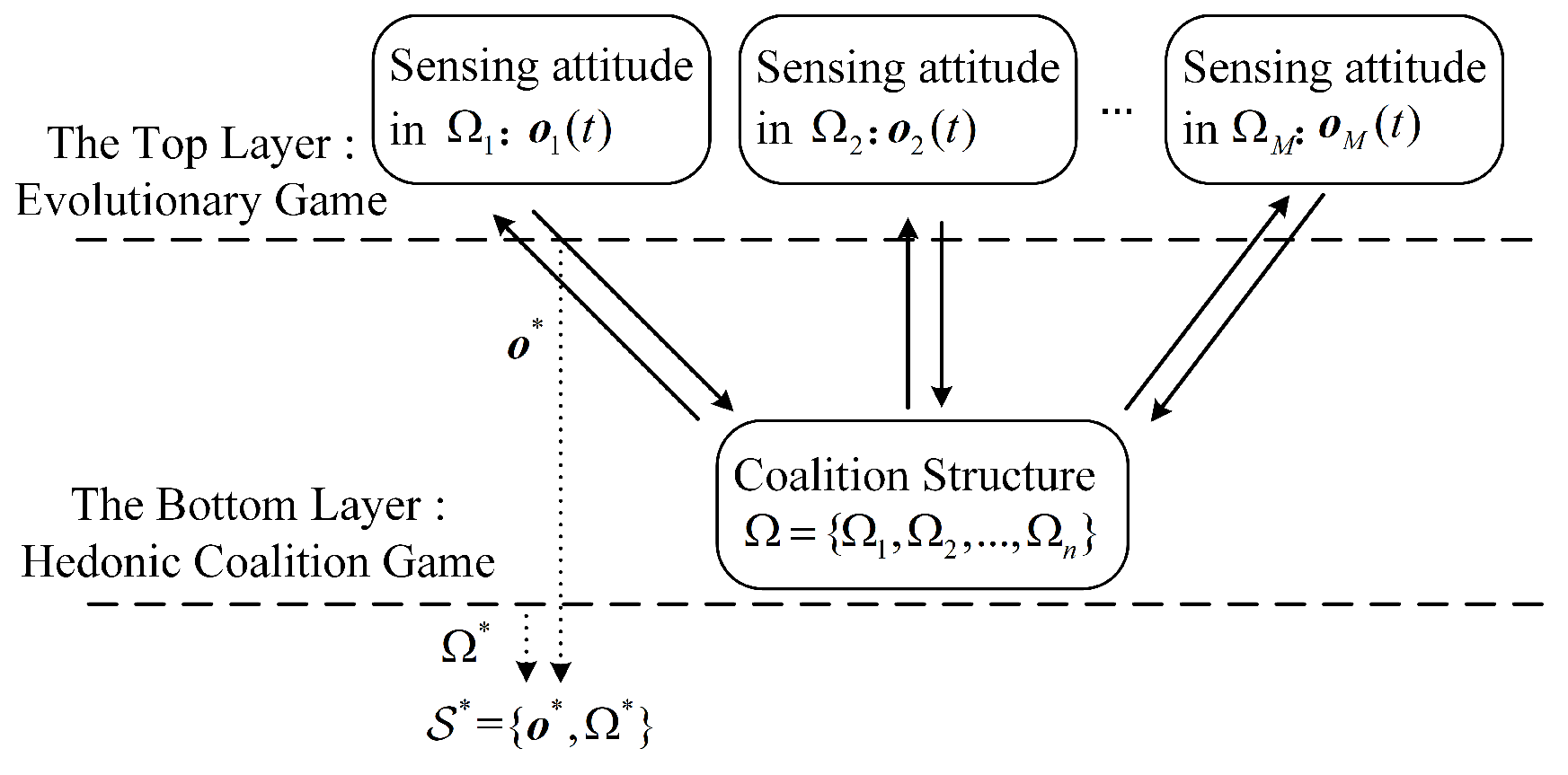
Figure 3, based on evolutionary game and hedonic coalition game models, an iterative algorithm for solving the game problem mentioned above is proposed in this section. In this paper, the cooperative spectrum sensing and access mechanism is modeled as a two-layer game, where the problem of whether SUs participate in cooperative sensing is modeled as an evolutionary game and the problem of which coalitions SUs choose to access is modeled as a hedonic coalition game. In this game, the SUs are considered participants, and
is considered a utility function of SU
. The SUs’ sensing attitude preference in the coalitions can be described as follows:
where
denotes the sensing attitude preference of SU
in coalition
in the
t-th time slot,
.
indicates that SU
will choose to sense PU
channel in coalition
, and
indicates that SU
will choose to be a free-rider in coalition
. The SU
’s strategy is denoted by
and
denotes the SU
choose the coalition
. To provide a clearer depiction of how SUs can modify their utility through specific actions, its utility function can be rewritten as follows:
Each SU maximize its utility by optimizing its sensing attitude and then enter a coalition. Thus, the optimization problem is formulated as follows:
From Equations (24)–(27), it can be seen that the strategies of both problems are interdependent. Therefore, the interaction of SUs can be formulated as a noncooperative game. Under the condition of Nash Equilibrium (NE), each SU’s strategy cannot get better utility without changing the strategy of other SUs. To comprehensively consider the feasibility and convergence of the two-level game algorithm, the definition of NE is given as follows:
Definition 1. Let and be the NEs of the sensing attitude strategy and the coalition formation strategy derived by the proposed TL-CSAG, respectively. , is an NE of TL-CSAG, and it can be given by: where , is the stable strategy for all SUs except SU.
4.1. The Top Layer Game: Sensing Attitude Strategy in the Coalition
This subsection analyzes the evolution of SUs’ sensing attitudes using the idea of evolutionary game theory. In each time slot, SUs calculate their own utility. If SU
’s utility
(C) for participating in sensing in
is higher than the average utility
, then in the next time slot, the probability of SU
participating in sensing will increase. To describe the evolution of the sensing attitude of SU
in
, the following differential equations [
29] are constructed as follows:
where
is the adjustment step size determined by SU
.
is the probability that in the
t-th time slot SU
participates in sensing in
.
In the next time slot, the probability of SU
participation in sensing in
can be calculated as follows:
Equation (30) describes the dynamic process of choosing its sensing attitude, where the sum of the probabilities of participating in sensing and free-riding is equal to 1.
This paper first study the game of two SUs in
, i.e.,
. The payoff table of the two SUs is shown in
Table 1 according to Equations (19) and (20), where
,
,
,
,
,
.
Let
and
denote the probability that
and
take attitude “C”, respectively, and
, then the expected payoff
while
chooses to contribute is expressed as follows:
The mean utility function of
is given by:
Therefore, the replicator dynamics of the two SUs using Equation (26) will be:
and
where
,
and
. According to the conditions of equilibrium, we have
and
, then, we get four equilibrium points:
, and the mixed strategy equilibrium
. The Jacobian matrix is formed by taking the partial derivatives of Equations (38) and (39), then we can obtain:
where
From the stability conditions of the Jacobian, the system converges when det and tr. The stability conditions for the four equilibrium points are:
(1) When , the strategies of and converge to (C, F).
(2) When , the strategies of and converge to (F, C).
(3) When and , the strategies of and converge to (C, C).
(4) When and , the strategies of and converge to (C, F) or (F, C) based on the initial adopted strategies.
The above mentioned has demonstrated the of the two SUs. However, due to the different utility functions of different SUs, it is difficult to obtain in the case of multiple SUs. Through repeated games, SUs can autonomously adapt to the changing environment, and each SU has a clear sensing strategy.
4.2. The Bottom Layer Game: Coalition Formation Strategy
Regardless of what sensing attitude is adopted or which coalition is accessed, it will directly affect the utility of SUs. In the bottom layer game, the method used by SUs to solve the problem of which coalition to access is modeled as a hedonic coalition game. Next, the relevant definitions and related theorems are stated and proved.
Definition 2. (Switch Rule): Given a partition of SUs’ set , SU decides to leave it current coalition and join another coalition , where , if and only if , where is the preference relation of . As a result, .
In order to evaluate the preferences of SU
over its own sets of possible coalitions, the concept of preference relation is introduced [
30] as follows:
where the relationship of
means that SU
prefers to join coalition
over coalition
. The
which is the preference function of SU
in
can be expressed as follows:
where
is the utility of
in coalition
and
is the history set of
. The history set contains the coalitions that SU
has joined prior to formation of the current partition
. In general, considering the history set can accelerate the convergence of the system.
According to the preference relationship of SU in Equation (34), it can be considered that when the history set of SU
is not considered:
Theorem 1. In TL-CSAG, the convergence rate of the sensing attitude strategy of SUs always precedes that of the coalition formation strategy. That is, the formation of precedes the formation of .
Proof. When the sensing attitude strategy does not reach , according to Equation (26), the utility function of SUs has two states, and the utility is unstable. According to the description of Equation (39), when SU exchanges its coalition, it may have and will join coalition . However, in the subsequent time slots, due to the change of , may occur, and SU will switch coalition again. □
After reaches , SUs determines their possible strategy of obtaining high returns , and will focus on the distribution of SUs in the coalition. When a division is a NE, it means that there is no coalition that makes the SU strictly like to join, while the other coalitions are not hurt by the formation of this new coalition. The NE formed by the hedonistic coalition is specifically defined as follows:
Definition 3. A parition is NE if .
Theorem 2. Once the sensing attitudes of SUs reache the stability strategy , the final coalition will also achieve the stability strategy .
Proof. After each switching operation, SUs will obtain higher utility in the new coalition. Given the number of channels M in the CIoT network and the number of SUs N, the total number of different partitions is , which is a finite number. Thus, from any given initial partition , the switching operation always terminates at some point after a finite number of iterations, where the coalition structure converges to the final partition . □
4.3. Algorithm Steps
Based on the analysis of the above two parts, the whole process of the proposed cooperative spectrum sensing and access algorithm based on the two-layer game can be obtained. During the initialization phase, each coalition selects the SU with the highest detection probability among all SUs as its CH. Furthermore, once a CH is selected by a coalition, it cannot be chosen by any other coalition, and it must always have a cooperative attitude. Furthermore,
of each coalition’s sensing attitude strategy is obtained by the evolution among the SUs. On the basis of
, the
formed by SUs can be obtained through the switch rules, and the specific steps are shown in Algorithm 1.
| Algorithm 1: The proposed two-layer cooperative sensing and accsee game |
- Require:
Location of the SU and the PU - Ensure:
Stable sensing attitudes ; Stable sensing coalitions ; - 1:
Initialization: Set iterations , initial sensing strategy probability , initialize parameter and ; Randomly initialize the attitudes of SUs ; Randomly and evenly distribute the SUs to each coalition ; - 2:
while and do - 3:
; - 4:
Randomly select two coalitions and from the coalitions set , and then switch SU to the coalition , etc., = ; - 5:
SU chooses a strategy with probability ; - 6:
Calculate the utility of SU, and calculate the utility of the coalition at which SU is exchanged; - 7:
SU decides whether to join a new coalition based on Equation (37); - 8:
Update and based on Equations (29) and (30); - 9:
while do - 10:
Set ; - 11:
Repeat steps 4, 6, 7; - 12:
Set ; - 13:
end while - 14:
end while
|
5. Simulation Analysis and Evaluation
In this section, MATLAB is used to simulate the performance of the proposed method. The spatial environment is established in a 1 km × 1 km planar coordinate system with 3 PUs and 15 SUs randomly distributed in the coordinate system; the sampling frequency is
MHz, the bandwidth is 2 MHz and the time of each frame is T = 10 ms. The rest of the simulation parameters are shown in
Table 2. The method proposed in [
31] is used here as a comparison, which is denoted by “Con”. The random algorithm randomizes the sensing attitudes and the coalitons of all SUs, which are denoted by “Random”. In the following section, the final state distribution of SUs, the relationship between detection probability and cooperation probability, which represents the proportion of contributors out of 15 SUs, the factors affecting cooperation probability, the fairness of the SUs distribution in the coalition, and finally the performance of the three algorithms in terms of throughput are investigated.
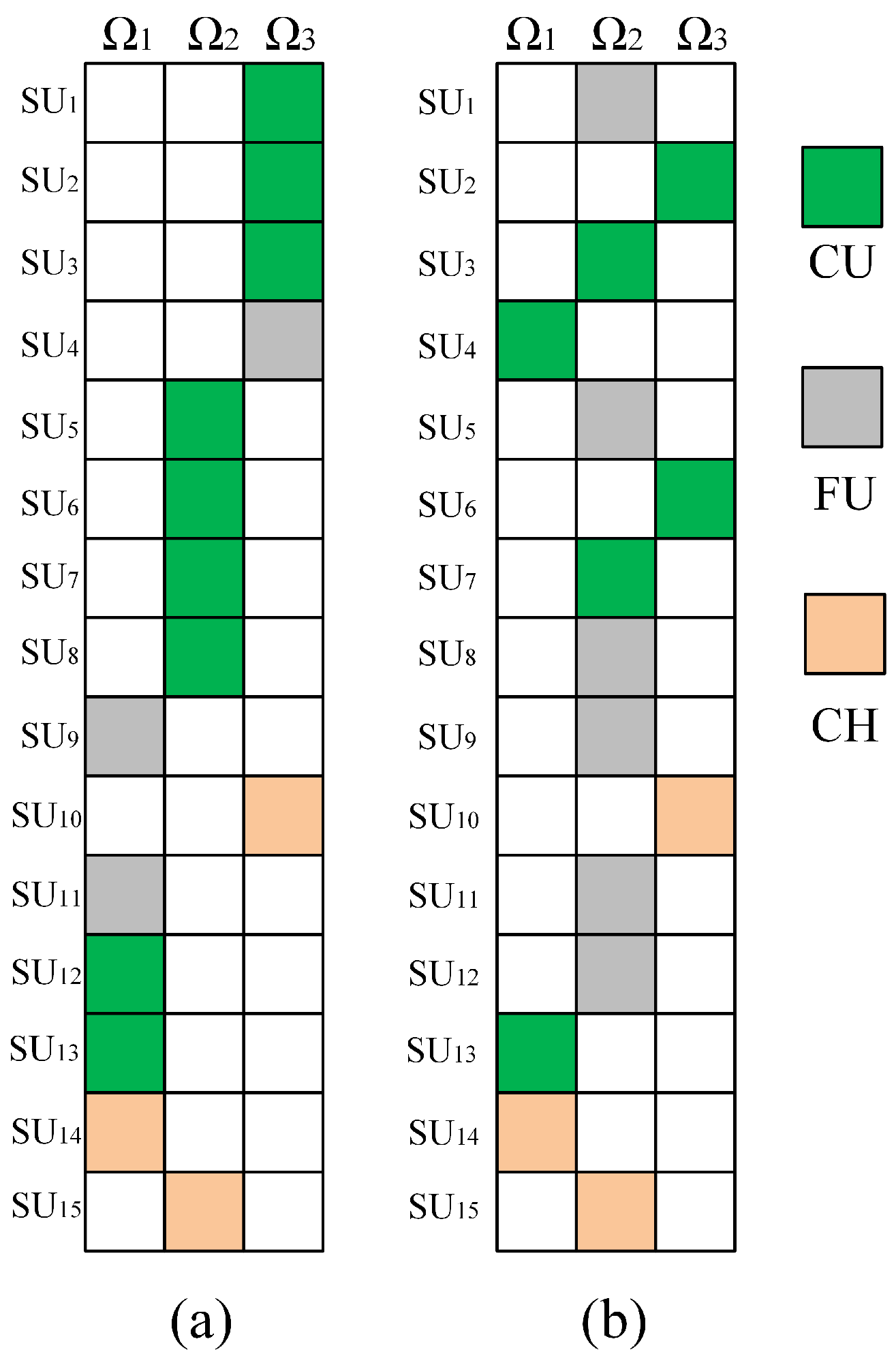
The initial coalition structure and the final coalition structure obtained from TL-CSGA are shown in
Figure 4a,b, respectively. In these two figures, each colored box represents an SU, and the boxes in the same column belong to the same coalition. As can be seen from
Figure 4b, SUs are finally distributed in three coalitions, and FUs are all distributed in coalition
. When the CIoT network is stable,
and
for each coalition will be fixed. As FUs do not contribute to the two parameters, switching their coalitions after the system is stable will not affect the interests of other SUs. Eventually, all FUs will be concentrated in the coalition with the highest benefit. Since the number of CUs will affect
, it is not advisable for each coalition to have too many CUs; otherwise, it will reduce the throughput of the system. Generally, CUs will be roughly evenly distributed in each coalition.
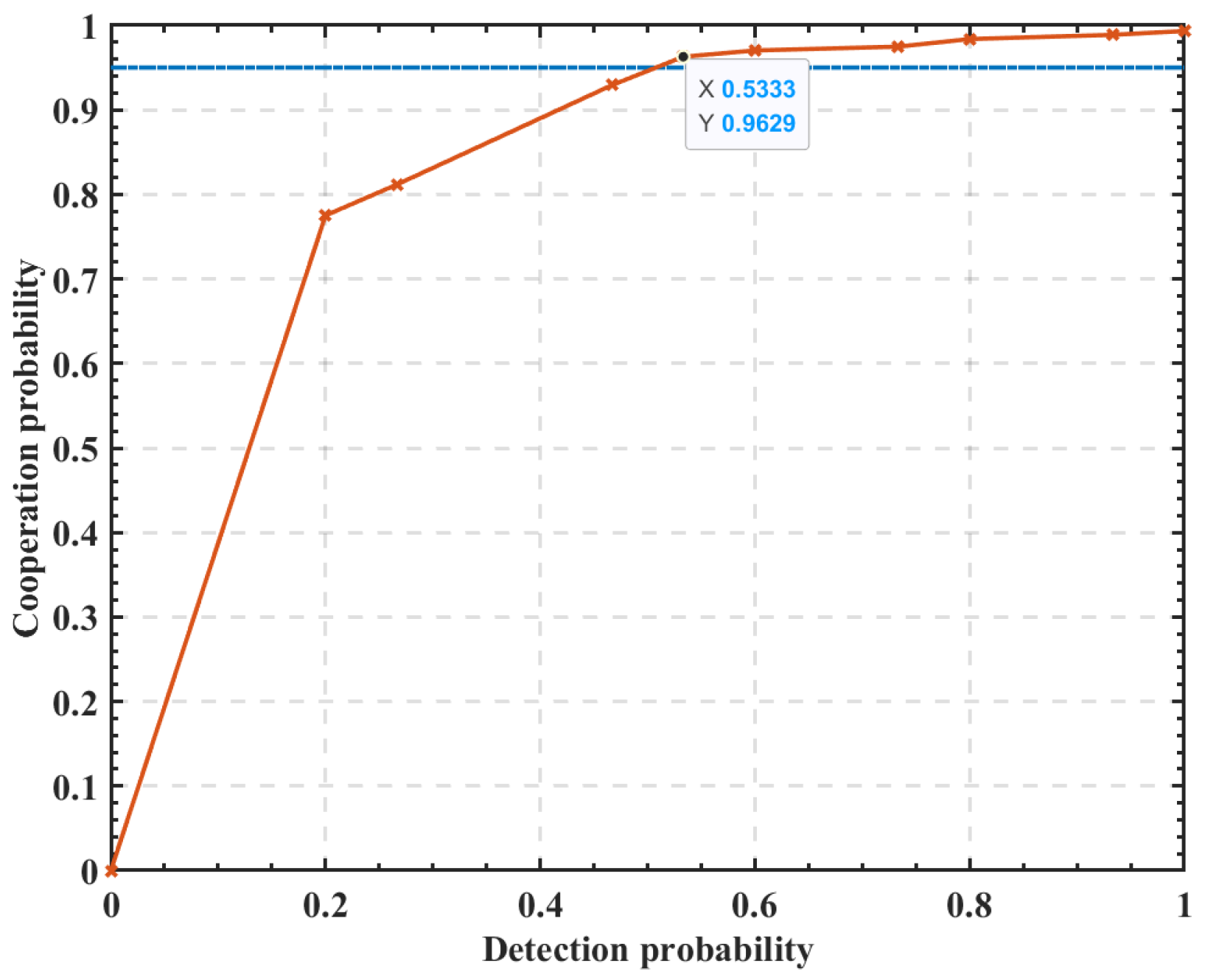
Figure 5 shows the relationship curves between the cooperation probability and the detection probability. As can be seen from
Figure 5, with a certain number of SUs, the average detection probability of coalitions increases as the cooperation probability increases. In CSS, to avoid interference from SUs to PUs, the coalition detection probability
needs to reach a certain threshold of
, i.e.,
. As a certain number of SUs participate, when the cooperation probability reaches a certain value, the coalition detection probability
can meet the requirement of
. This paper assumes that the coalition detection probability needs to meet
.
Figure 6 shows the effect of
and
on the probability of cooperation with the 15 SUs. It can be seen that the increased value of
is more likely to prompt SUs to adopt a cooperative sensing attitude. Moreover, it may also increase the probability of SUs cooperation with increasing
values.
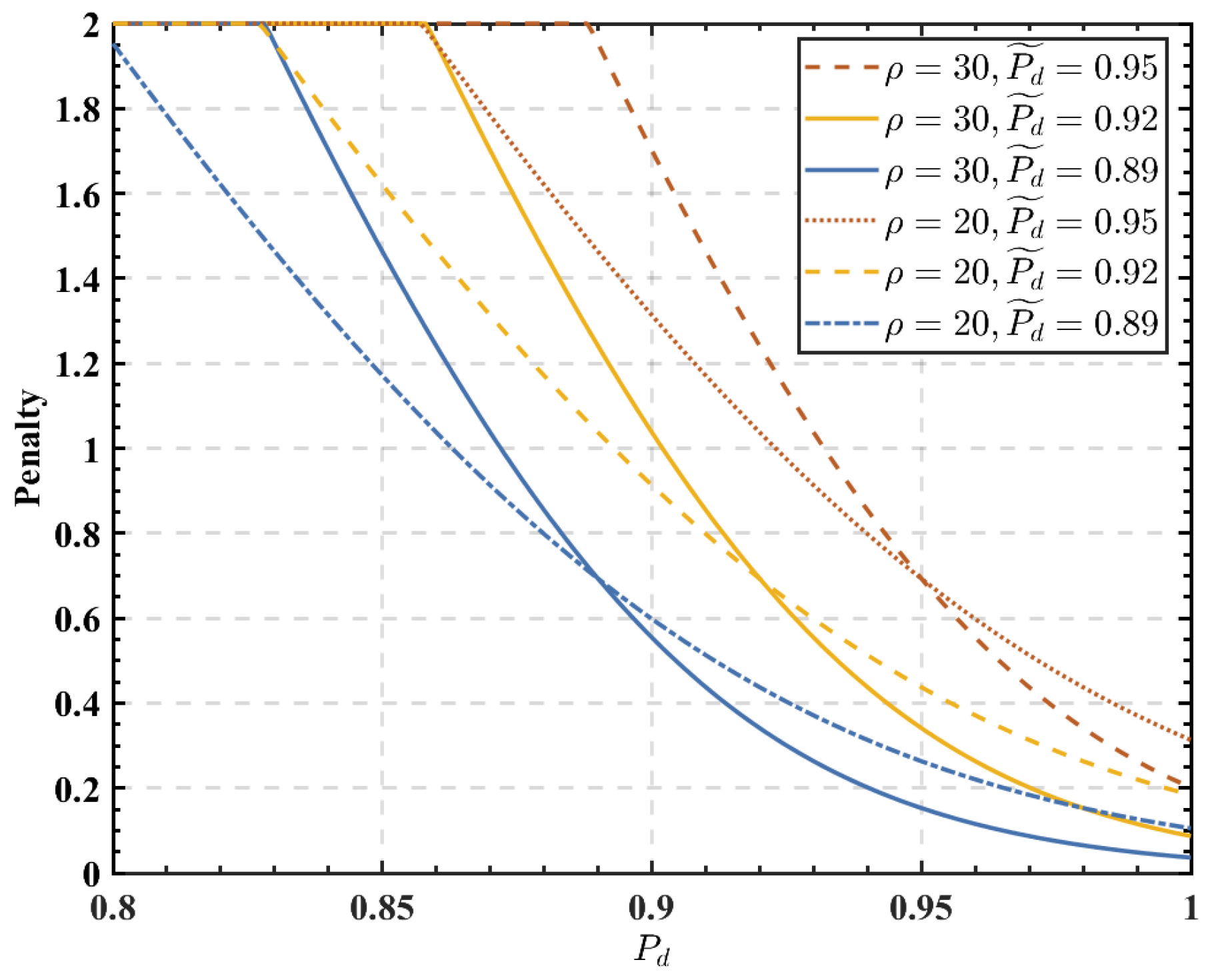
Figure 7 shows the effect of
,
, and detection probability
on the penalty function. As shown in
Figure 7, the higher the detection probability of the coalition, the smaller the penalty to FUs in the coalition. For the same detection probability, decreasing
will reduce the penalty to FUs. In
Figure 6, the effect of
on the cooperation probability is essentially the effect of
on the penalty function, which in turn affects the cooperation probability of SUs.
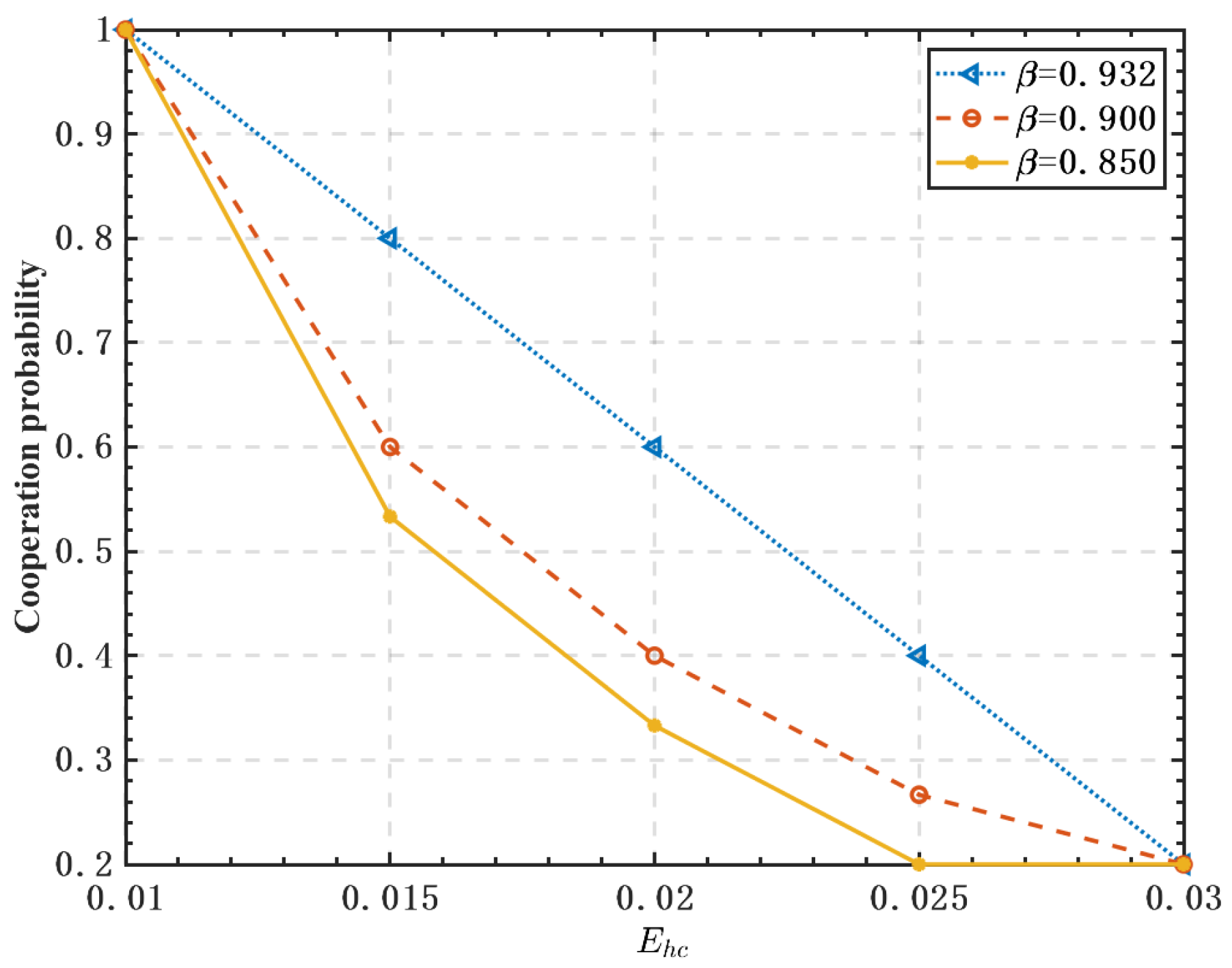
Figure 8 shows the effect of the energy harvested by FUs and the weight factor
on the cooperation probability of the system. In
Figure 8, it can be observed that the more energy harvested by FUs, the lower the cooperation probability. The reason is that free-riders can obtain high profits by harvesting more RF energy. Similarly, a lower weight factor
leads to a lower probability of cooperation. Under a certain amount of energy harvesting by FUs, increasing
can improve energy harvesting benefits, reduce consumption during spectrum sensing, and improve data transmission efficiency. The simulation results show that the EH technology can provide more benefits to selfish SUs, and its application may exacerbate their free-riding behavior.
In order to evaluate the fairness of SUs’ allocation of each coalition, Jain’s fairness is introduced [
32], which is defined as follows:
Jain’s fairness evaluates the fairness of a set of values, where there are n coalitions and is the value allocated to SU, and it is located in . corresponds to the minimum fair allocation where only one SU obtains a non-zero value, and 1 corresponds to the maximum fair allocation where all SUs receive the same value.
By adjusting the cooperation probability to ensure
, the fairness of different algorithms in SUs’ allocation was analyzed. The fairness indices of the three coalitions in
Figure 4b are shown in
Table 3, which lists the detection probabilities, false alarm probabilities, and corresponding fairness
of the three coalitions using TL-CASG and “Con” algorithms. It can be seen that the fairness index of the TL-CASG algorithm is superior to that of the “Con” algorithm in terms of both detection probability and false alarm probability. This is because the “Con” algorithm only considers the distance between SUs and PUs when forming coalitions without considering the influence of SUs in other coalitions globally.
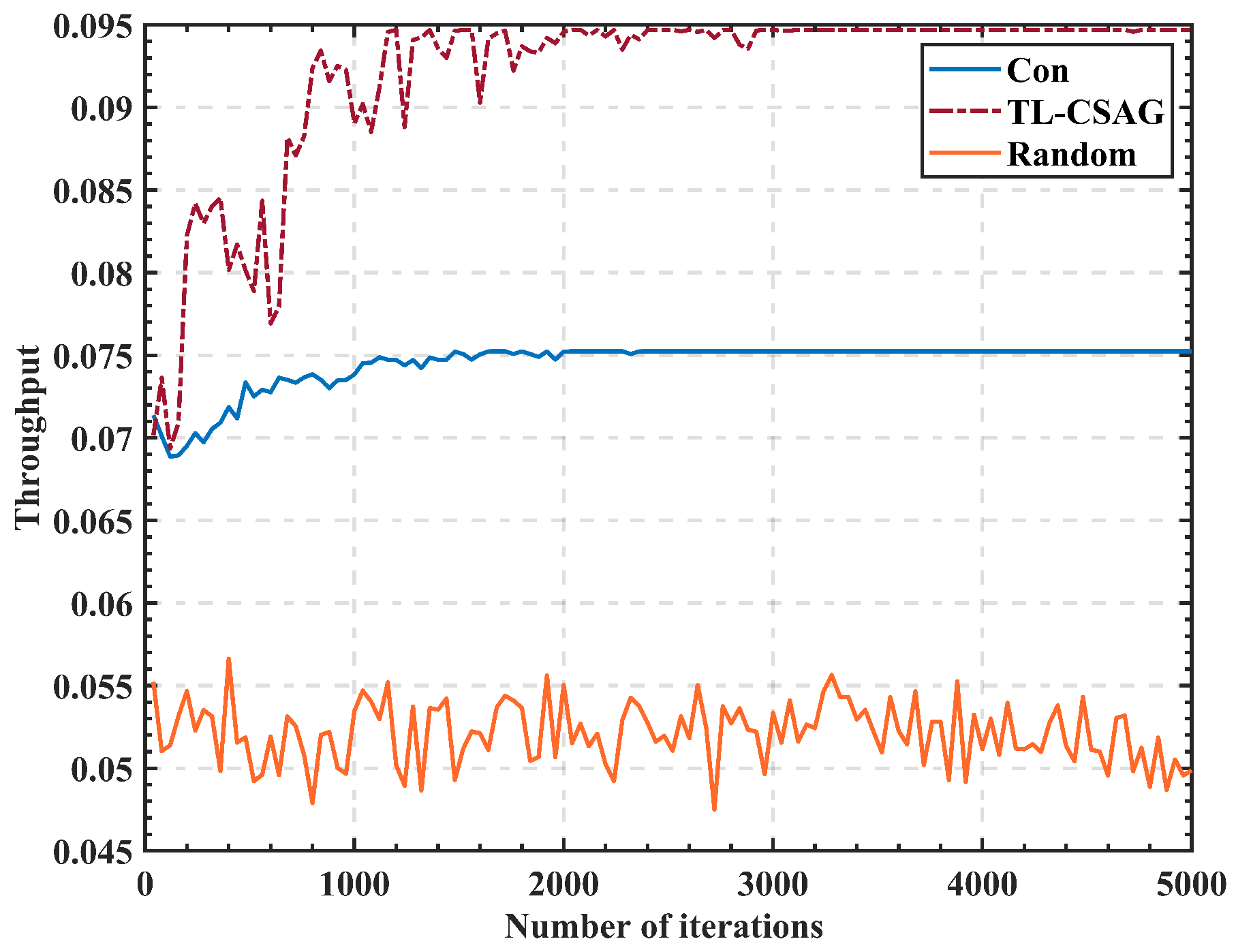
The relationship between throughput and the number of iterations of three algorithms is compared in
Figure 9. By modeling the problem of which PU channel is sensed by SUs, the proposed algorithm can fully utilize the sensing capability of SUs in the multi-PU model and improve the overall system throughput. After reaching an equilibrium state in the “Con” algorithm and TL-CSAG, the average throughput of the proposed TL-CSAG algorithm increased by
and
, respectively, compared with the “Random” algorithm and “Con” algorithm.
6. Conclusions
On the basis of the EH-CIoT model, this paper considers the free-riding problem of SUs. In order to prevent low system detection performance due to excessive SUs’ free-riding behavior, this paper establishes a penalty mechanism to stimulate SUs to sense the PU spectrum normally. To address the issue of whether SUs should free-ride and which PU spectrum to sense and access to gain higher benefits, a two-layer game-based cooperative spectrum sensing and access method is proposed to improve spectrum utilization and the fairness of the proposed method. Simulation results show that after the system reaches equilibrium, CUs are uniformly distributed among the three coalitions, but FUs are in the coalition with the highest profit. In the case of a fixed number of SUs, as the probability of cooperation increases, the average detection probability of coalitions also increases. At the same time, this paper also studied the impact of different parameters on the probability of cooperation, and simulation results confirmed that the more energy harvested, the lower the probability of SUs adopting a cooperative sensing attitude. Furthermore, Jain’s fairness concept is introduced to evaluate the higher fairness of the coalition in SUs’ allocation in our algorithm. Finally, this paper studied the impact of using different algorithms on throughput, and the results show that the proposed algorithm improves throughput by and 26.3% compared with traditional algorithms. In the future study, we will further explore the secrecy and energy-efficient resource allocation for our proposed network. In the future study, we will further explore the application of free-riders in mobile networks and optimize algorithm models to achieve faster iteration speeds.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}