
Evaluating Gait Stability and Muscle Activation in Different Hand Holding Conditions Using the Robotic Walker-mTPAD



Abstract
:1. Introduction
2. Materials and Methods
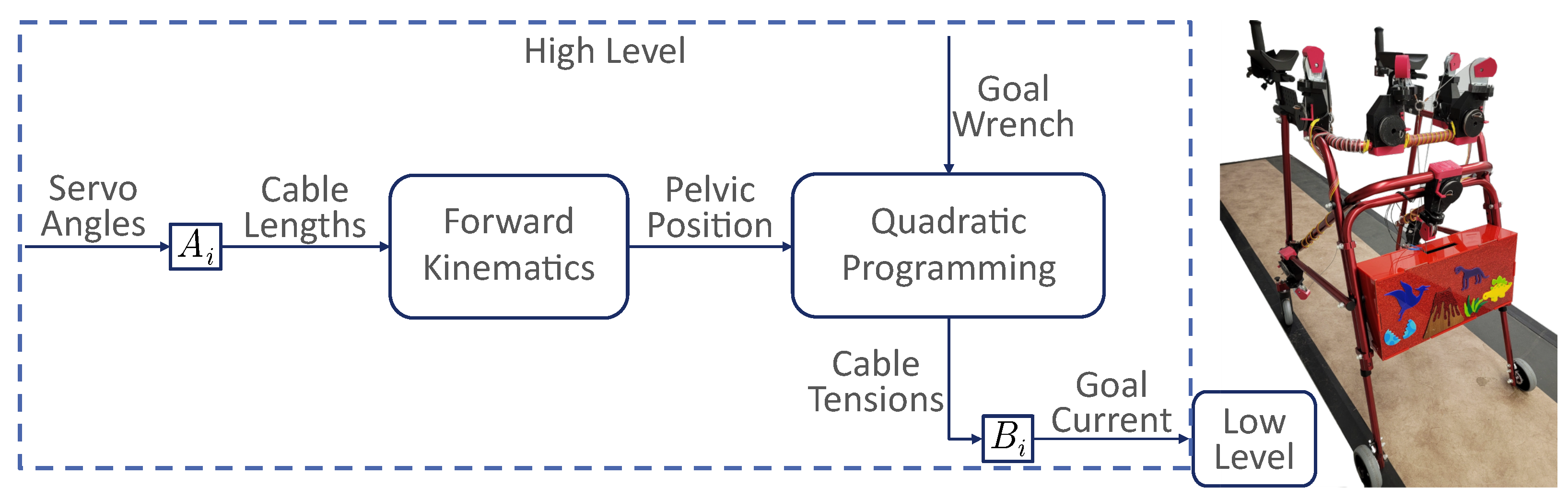
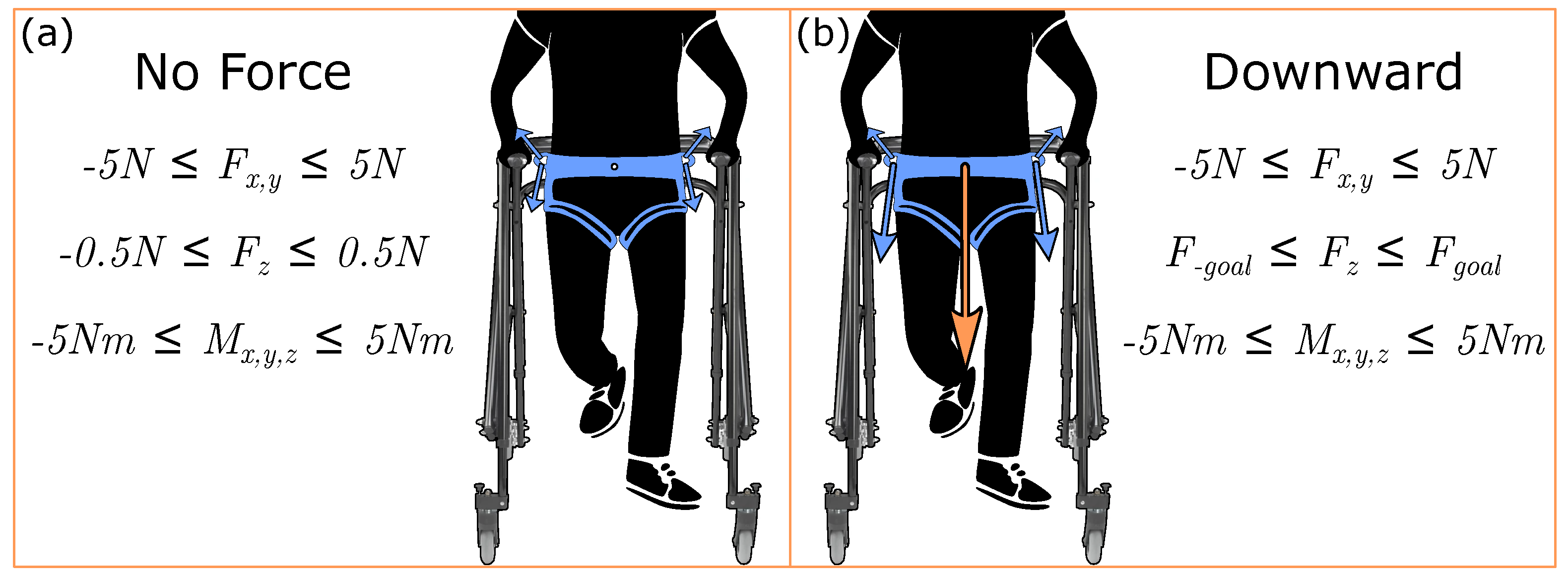
2.1. System Design
2.2. Experimental Setup
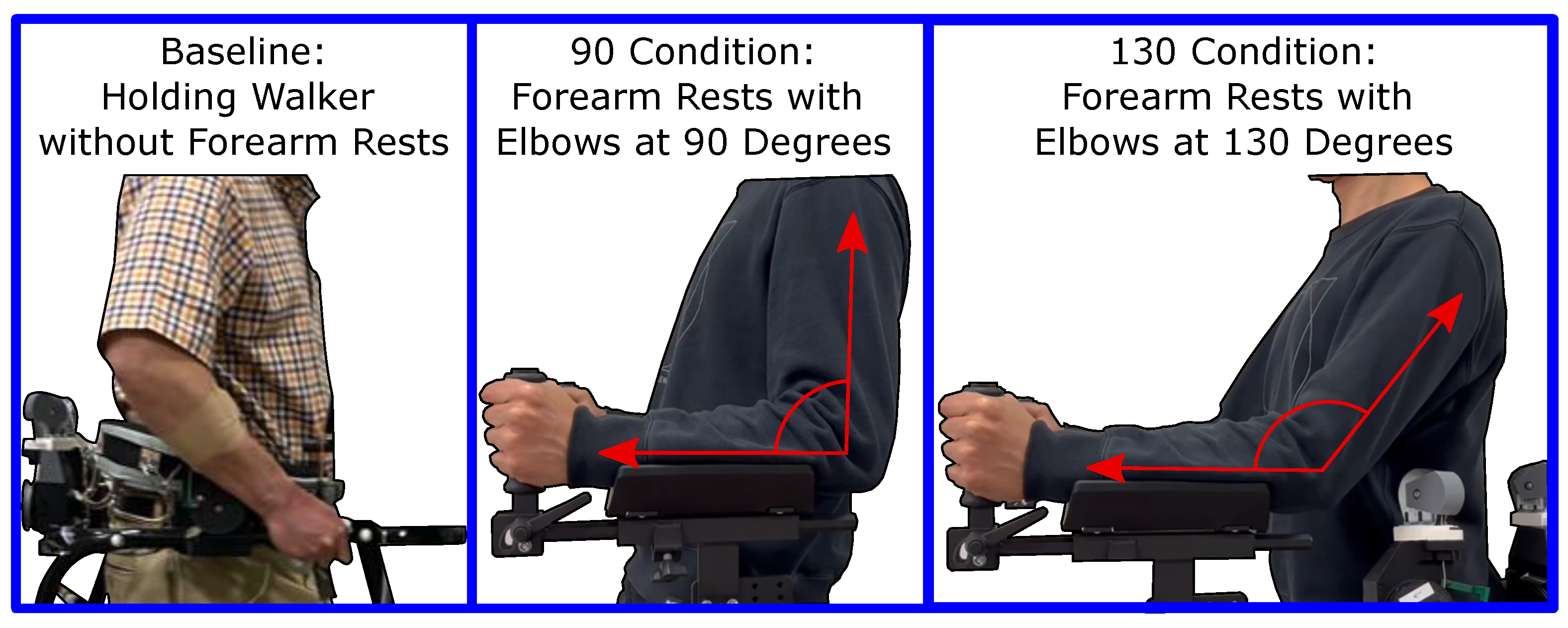
2.3. Protocol
2.4. Gait Data and Segmentation
2.5. Surface Electromyography
2.6. Statistical Analysis
3. Results
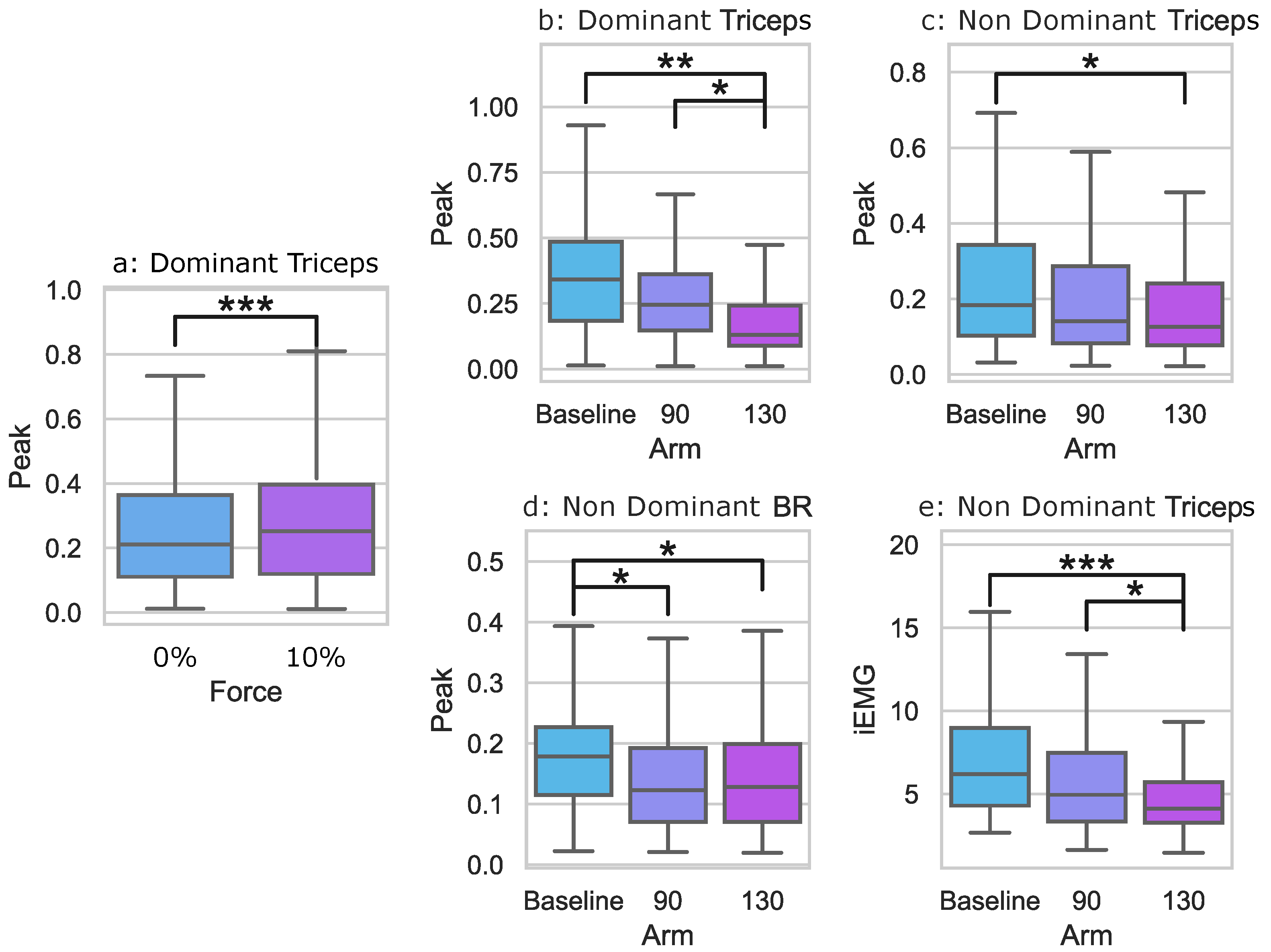
3.1. sEMG
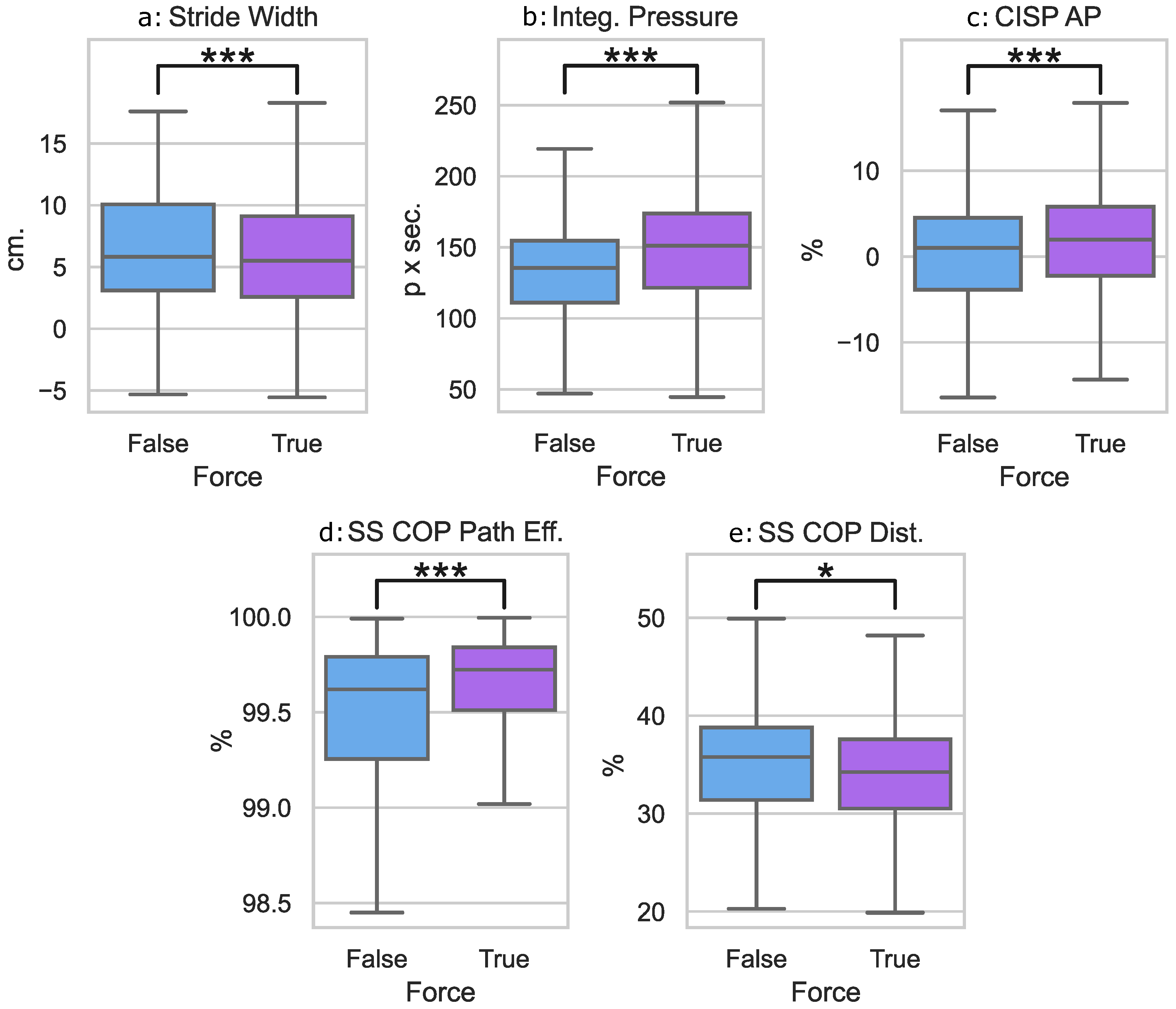
3.2. Mat
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| sEMG | Surface Electromyography |
| mTPAD | mobile Tethered Pelvic Assist Device |
| BW | Body Weight |
| CCD | Charge-Coupled Device |
| DOF | Degrees of Freedom |
| PKMAS | ProtoKinetics Movement Analysis Software |
| UDP | User Datagram Protocol |
| COP | Center of Pressure |
| SS | Single Stance |
| AP | Anterior-Posterior |
| CISP | Cyclogram Intersection Point |
| ML | Mediolateral |
| iEMG | Integrated Surface Electromyography |
| rm-ANOVA | Repeated Measures Analysis of Variance |
| BR | Brachioradialis |
| ND | Non-dominant |
| D | Dominant |
| F | Force |
| NF | No Force |
References
- Ko, C.Y.; Kim, S.B.; Choi, H.J.; Chang, Y.; Kang, S.; Heo, Y.; Ryu, J.; Kim, G.; Mun, M. Assessment of forearm and plantar foot load in the elderly using a four-wheeled walker with armrest and the effect of armrest height. Clin. Interv. Aging 2014, 9, 1759. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gell, N.M.; Wallace, R.B.; LaCroix, A.Z.; Mroz, T.M.; Patel, K.V. Mobility device use in older adults and incidence of falls and worry about falling: Findings from the 2011–2012 national health and aging trends study. J. Am. Geriatr. Soc. 2015, 63, 853–859. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Alwan, M.; Ledoux, A.; Wasson, G.; Sheth, P.; Huang, C. Basic walker-assisted gait characteristics derived from forces and moments exerted on the walker’s handles: Results on normal subjects. Med. Eng. Phys. 2007, 29, 380–389. [Google Scholar] [CrossRef] [PubMed]
- Costamagna, E.; Thies, S.B.; Kenney, L.P.; Howard, D.; Lindemann, U.; Klenk, J.; Baker, R. Objective measures of rollator user stability and device loading during different walking scenarios. PLoS ONE 2019, 14, e0210960. [Google Scholar] [CrossRef]
- Guo, Y.; Zhao, Y.; Salem, Y.; Miller, K.; Quiben, M.; Liu, H. Postural effect on gait characteristics by using rolling walkers. Geriatr. Nurs. 2020, 41, 916–920. [Google Scholar] [CrossRef]
- Krafft, F.C.; Herzog, M.; Stein, T.; Sloot, L.H. Young individuals are more stable and stand more upright when using rollator assistance during standing up and sitting down. Front. Bioeng. Biotechnol. 2022, 10, 876349. [Google Scholar] [CrossRef]
- Takanokura, M. Optimal handgrip height of four-wheeled walker on various road conditions to reduce muscular load for elderly users with steady walking. J. Biomech. 2010, 43, 843–848. [Google Scholar] [CrossRef]
- Thies, S.B.; Russell, R.; Al-Ani, A.; Belet, T.; Bates, A.; Costamagna, E.; Kenney, L.; Howard, D. An investigation of the effects of walking frame height and width on walking stability. Gait Posture 2020, 82, 248–253. [Google Scholar] [CrossRef]
- Bennett, M.; Hutchins, T.; Platz, K. The Impact of Walker Style on Gait Characteristics in Non-assistive Device Dependent older Adults. 2017. Retrieved from Sophia, the St. Catherine University Repository Website. Available online: https://sophia.stkate.edu/dpt_papers/58 (accessed on 1 March 2023).
- Choi, H.J.; Ko, C.Y.; Kang, S.; Ryu, J.; Mun, M.; Jeon, H.S. Effects of balance ability and handgrip height on kinematics of the gait, torso, and pelvis in elderly women using a four-wheeled walker. Geriatr. Gerontol. Int. 2015, 15, 182–188. [Google Scholar] [CrossRef]
- Bachschmidt, R.A.; Harris, G.F.; Simoneau, G.G. Walker-assisted gait in rehabilitation: A study of biomechanics and instrumentation. IEEE Trans. Neural Syst. Rehabil. Eng. 2001, 9, 96–105. [Google Scholar] [CrossRef] [Green Version]
- Abellanas, A.; Frizera, A.; Ceres, R.; Raya, R. Assessment of the laterality effects through forearm reaction forces in walker assisted gait. Procedia Chem. 2009, 1, 1227–1230. [Google Scholar] [CrossRef] [Green Version]
- Aoyama, H.; Yonenobu, K.; Ogawa, K.; Jeong, S. Effect of upper extremity load on pelvic movements during wheeled upright walker use. J. Phys. Ther. Sci. 2022, 34, 269–274. [Google Scholar] [CrossRef]
- Uegami, K.; Aoyama, H.; Ogawa, K.; Yonenobu, K.; Jeong, S. Proposal of Rolling Type Training Walker with Gait Handling Device. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 15–18 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 168–172. [Google Scholar]
- Jayaraman, C.; Mummidisetty, C.K.; Loesch, A.; Kaur, S.; Hoppe-Ludwig, S.; Staat, M.; Jayaraman, A. Postural and metabolic benefits of using a forearm support walker in older adults with impairments. Arch. Phys. Med. Rehabil. 2019, 100, 638–647. [Google Scholar] [CrossRef]
- Zhao, X.; Zhu, Z.; Liu, M.; Zhao, C.; Zhao, Y.; Pan, J.; Wang, Z.; Wu, C. A smart robotic walker with intelligent close-proximity interaction capabilities for elderly mobility safety. Front. Neurorobotics 2020, 14, 575889. [Google Scholar] [CrossRef] [PubMed]
- Hellström, T.; Lindahl, O.; Bäcklund, T.; Karlsson, M.; Hohnloser, P.; Bråndal, A.; Hu, X.; Wester, P. An intelligent rollator for mobility impaired persons, especially stroke patients. J. Med. Eng. Technol. 2016, 40, 270–279. [Google Scholar] [CrossRef] [PubMed]
- Uegami, K.; Aoyama, H.; Ogawa, K.; Yonenobu, K.; Jeong, S. Proposal of Wheeled Gait-Training Walker with Dual-Assist Arms and Preliminary Pelvis-Handling Control. J. Robot. Mechatron. 2021, 33, 676–685. [Google Scholar] [CrossRef]
- Golembiewski, C.; Schultz, J.; Reissman, T.; Merriman, H.; Walsh-Messinger, J.; Jackson, K.; Bigelow, K.E. The effects of a positional feedback device on rollator walker use: A validation study. Assist. Technol. 2021, 33, 318–325. [Google Scholar] [CrossRef]
- Huang, J.; Koyachi, N. Evaluating the assistance effectiveness of a newly developed rollator mounted with a freely rotating chest support pad. In Proceedings of the 2016 IEEE International Conference on Robotics and Biomimetics (ROBIO), Qingdao, China, 3–7 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1185–1190. [Google Scholar]
- Mun, K.R.; Guo, Z.; Yu, H. Development and evaluation of a novel overground robotic walker for pelvic motion support. In Proceedings of the 2015 IEEE International Conference on Rehabilitation Robotics (ICORR), Singapore, 11–14 August 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 95–100. [Google Scholar]
- Stramel, D.M.; Agrawal, S.K. Validation of a forward kinematics based controller for a mobile tethered pelvic assist device to augment pelvic forces during walking. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 10133–10139. [Google Scholar]
- Stramel, D.M.; Agrawal, S.K. Assessing Changes in Human Gait with a Mobile Tethered Pelvic Assist Device (mTPAD) in Transparent Mode with Hand Holding Conditions. In Proceedings of the 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Republic of Korea, 21–24 August 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–6. [Google Scholar]
- Stramel, D.M.; Prado, A.; Roy, S.H.; Kim, H.; Agrawal, S.K. Effects of Timed Frontal Plane Pelvic Moments during Overground Walking with a Mobile TPAD System. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 31, 48–57. [Google Scholar] [CrossRef]
- Lynall, R.C.; Zukowski, L.A.; Plummer, P.; Mihalik, J.P. Reliability and validity of the protokinetics movement analysis software in measuring center of pressure during walking. Gait Posture 2017, 52, 308–311. [Google Scholar] [CrossRef]
- Lugade, V.; Kaufman, K. Center of pressure trajectory during gait: A comparison of four foot positions. Gait Posture 2014, 40, 719–722. [Google Scholar] [CrossRef] [Green Version]
- De Luca, C.J.; Gilmore, L.D.; Kuznetsov, M.; Roy, S.H. Filtering the surface EMG signal: Movement artifact and baseline noise contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef] [PubMed]
- Van Boxtel, A. Optimal signal bandwidth for the recording of surface EMG activity of facial, jaw, oral, and neck muscles. Psychophysiology 2001, 38, 22–34. [Google Scholar] [CrossRef] [PubMed]
- Ko, S.U.; Gunter, K.B.; Costello, M.; Aum, H.; MacDonald, S.; White, K.N.; Snow, C.M.; Hayes, W.C. Stride width discriminates gait of side-fallers compared to other-directed fallers during overground walking. J. Aging Health 2007, 19, 200–212. [Google Scholar] [CrossRef]
- Young, P.M.M.; Dingwell, J.B. Voluntarily changing step length or step width affects dynamic stability of human walking. Gait Posture 2012, 35, 472–477. [Google Scholar] [CrossRef] [PubMed] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measure | Muscle | Side | Variable | Test Stat | p-Value | Baseline-90 | Baseline-130 | 90-130 | F-NF |
|---|---|---|---|---|---|---|---|---|---|
| Peak | BR | ND | Force | F(1,9) = 0.63 | 0.45 | - | |||
| Arm | F(2,18) = 3.62 | 0.048 | 0.0304 | 0.0372 | 1.00 | ||||
| BR | D | Force | Z = 0.0002 | 0.99 | - | ||||
| Arm | Z = 11.7 | 0.003 | 0.22 | 0.06 | 1.00 | ||||
| Peak | Triceps | ND | Force | F(1,9) = 2.50 | 0.15 | - | |||
| Arm | F(2,18) = 4.15 | 0.033 | 0.17 | 0.0106 | 0.14 | ||||
| Triceps | D | Force | F(1,9) = 17.68 | 0.002 | 0.0011 | ||||
| Arm | F(2,18) = 5.32 | 0.015 | 0.06 | 0.0021 | 0.0081 | ||||
| iEMG | BR | ND | Force | Z = 0.22 | 0.64 | - | |||
| Arm | Z = 11.1 | 0.004 | 0.77 | 0.22 | 1.00 | ||||
| BR | D | Force | Z = 0.08 | 0.78 | - | ||||
| Arm | Z = 16.3 | 0.0003 | 0.67 | 0.20 | 1.00 | ||||
| iEMG | Triceps | ND | Force | F(1,9) = 2.39 | 0.16 | - | |||
| Arm | F(2,18) = 7.18 | 0.005 | 0.09 | 0.0003 | 0.0332 | ||||
| Triceps | D | Force | Z = 0.33 | 0.56 | - | ||||
| Arm | Z = 15.7 | 0.0004 | 0.73 | 0.16 | 0.64 |
| Measure | Variable | Test Stat | p-Value |
|---|---|---|---|
| Integrated Pressure | Force | F(1,9) = 81.50 | p< 0.001 |
| Arm | F(2,18) = 0.66 | 0.53 | |
| Stride Length (cm) | Force | F(1,9) = 0.36 | 0.56 |
| Arm | F(2,18) = 0.32 | 0.73 | |
| Stride Velocity (cm/s) | Force | F(1,9) = 0.67 | 0.43 |
| Arm | F(2,18) = 0.38 | 0.69 | |
| Stride Width (cm) | Force | F(1,9) = 9.7 | 0.012 |
| Arm | F(2,18) = 0.59 | 0.56 | |
| AP CISP % | Force | F(1,9) = 18.05 | 0.002 |
| Arm | F(2,18) = 2.01 | 0.16 | |
| ML CISP % | Force | F(1,9) = 0.001 | 0.97 |
| Arm | F(2,18) = 0.68 | 0.52 | |
| SS COP Dist. % | Force | F(1,9) = 5.66 | 0.041 |
| Arm | F(2,18) = 6.74 | 0.006 | |
| SS COP Eff. % | Force | F(1,9) = 7.70 | 0.022 |
| Arm | F(2,18) = 0.19 | 0.83 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jacobs, M.; Stramel, D.M.; Shair, M.; Agrawal, S.K. Evaluating Gait Stability and Muscle Activation in Different Hand Holding Conditions Using the Robotic Walker-mTPAD. Sensors 2023, 23, 5996. https://doi.org/10.3390/s23135996
Jacobs M, Stramel DM, Shair M, Agrawal SK. Evaluating Gait Stability and Muscle Activation in Different Hand Holding Conditions Using the Robotic Walker-mTPAD. Sensors. 2023; 23(13):5996. https://doi.org/10.3390/s23135996
Chicago/Turabian StyleJacobs, Malka, Danielle Marie Stramel, Mayyada Shair, and Sunil K. Agrawal. 2023. "Evaluating Gait Stability and Muscle Activation in Different Hand Holding Conditions Using the Robotic Walker-mTPAD" Sensors 23, no. 13: 5996. https://doi.org/10.3390/s23135996
APA StyleJacobs, M., Stramel, D. M., Shair, M., & Agrawal, S. K. (2023). Evaluating Gait Stability and Muscle Activation in Different Hand Holding Conditions Using the Robotic Walker-mTPAD. Sensors, 23(13), 5996. https://doi.org/10.3390/s23135996