
Utilising Sentinel-1’s Orbital Stability for Efficient Pre-Processing of Radiometric Terrain Corrected Gamma Nought Backscatter
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
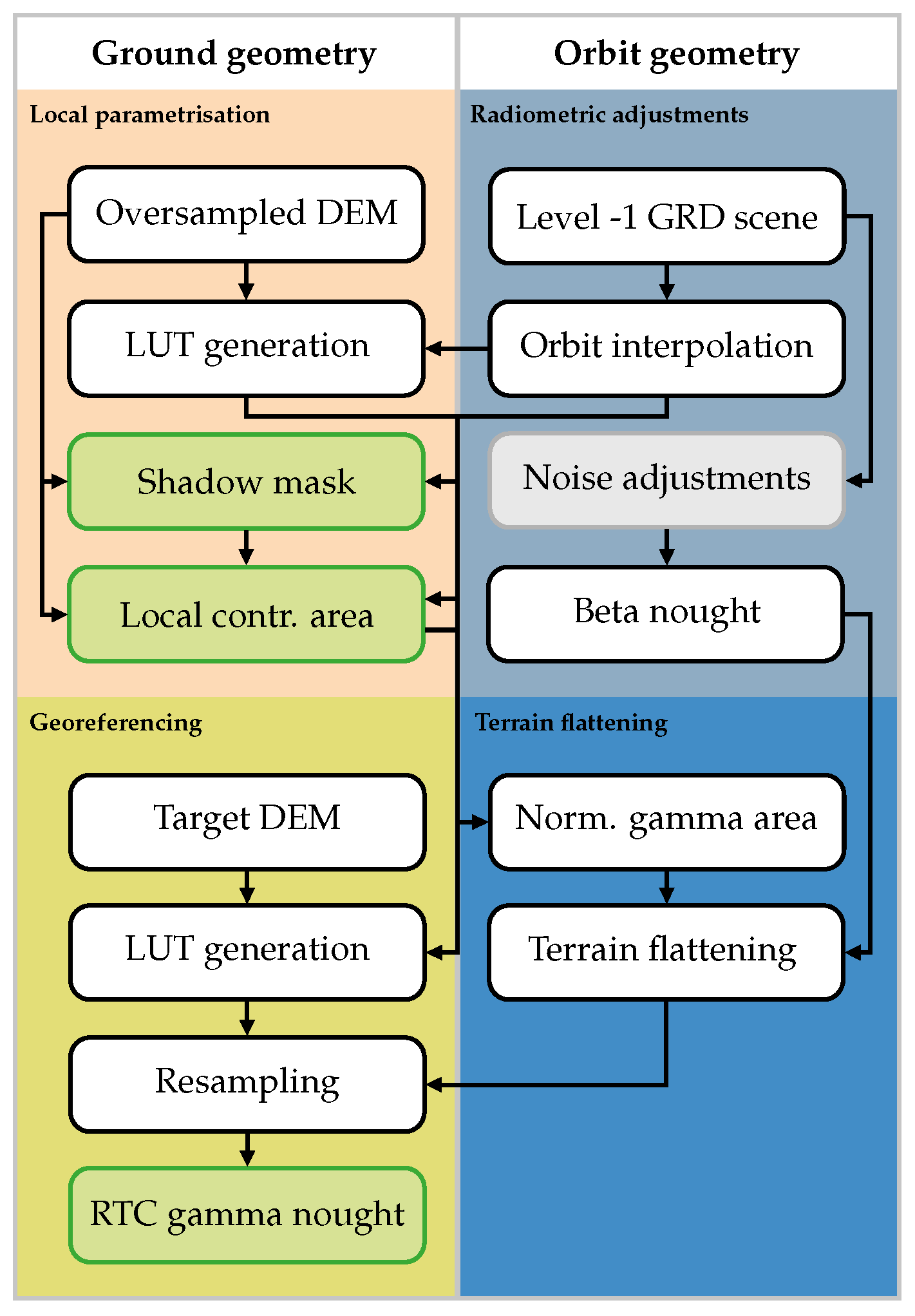
2.1. Sentinel-1 Pre-Processing Workflow
- Local parameterisation: In the first step the ground-geometry-based layers are computed, i.e., the local contributing area, the shadow mask, and a Look-Up Table (LUT) containing azimuth and range indices. In this study, we use the shadow mask algorithm presented in [33]. By traversing the DEM from East to West or vice versa—depending on the orbit direction—the continuous analysis of the elevation angle allows to identify areas that are not visible to the sensor and thus do not contribute to the backscattered signal (occluded by shadow).
- Radiometric adjustments: The same method as described in [29], except that the calibration values refer to instead of .
- Terrain flattening: After bilinearly resampling the local contributing area (excluding pixels in shadow), into the orbit geometry, overlapping areas are cumulatively summed up. This area is then used to radiometrically normalise to , as explained in [14].
- Georeferencing: In the last step, values are geocoded and resampled to the ground geometry at the desired pixel spacing of the final product.
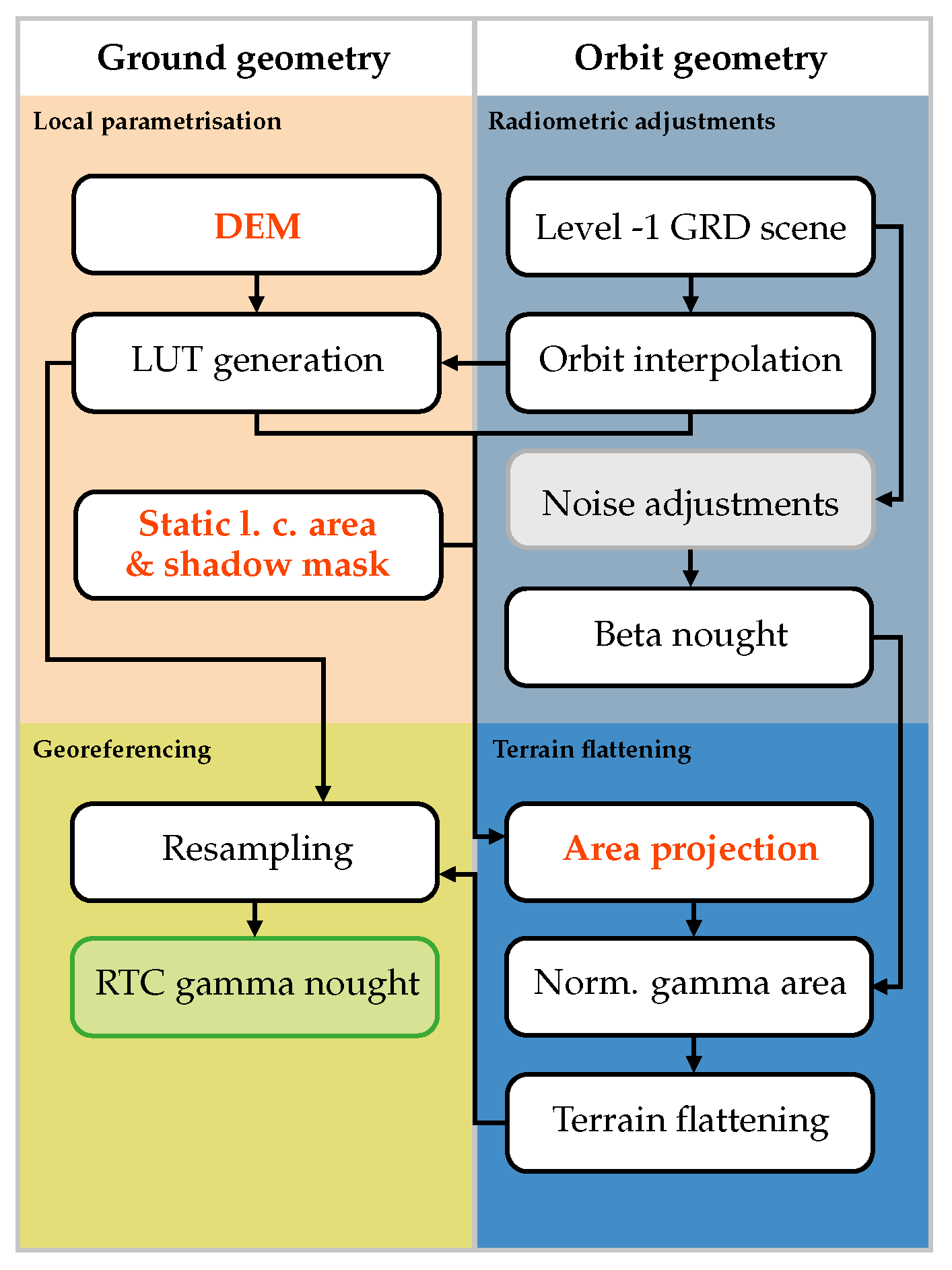
2.2. Sentinel-1 Pre-Processing Workflow Enhancements
2.2.1. Static Layer
2.2.2. Single LUT
2.2.3. RTC Area Projection (RTC-AP)
2.2.4. Benchmarking Environment
2.3. Input Data
2.4. Oversampling Analysis
3. Uncertainty Propagation
3.1. Monte Carlo Simulations of and
3.2. Static Layer Realisation of and
4. Results
4.1. Run Time Benchmarking
- Scene preparation: Merges all scene- and orbit-related steps, including reading Level-1 data.
- Auxiliary data preparation: Comprises loading and preparation of all auxiliary layers, i.e., DEM data, and optionally, the static layer per relative orbit.
- RTC: Performs all steps under Local parameterisation, Terrain flattening, and Georeferencing, excluding I/O as indicated in Figure 1.
- Data export: Single step writing all encoded data as GeoTIFF files to disk. Since processing consumes more RAM, we encoded backscatter data as scaled dB values and selected Int16 as a data type.
4.2. Recommended Sentinel-1 Pre-Processing Workflow
4.3. Backscatter Benchmarking
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tsokas, A.; Rysz, M.; Pardalos, P.M.; Dipple, K. SAR data applications in earth observation: An overview. Expert Syst. Appl. 2022, 205, 117342. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Freeman, V.; Cao, S.; Paulik, C.; Schaufler, S.; Stachl, T.; Modanesi, S.; Massari, C.; Ciabatta, L.; Brocca, L.; et al. Toward global soil moisture monitoring with Sentinel-1: Harnessing assets and overcoming obstacles. IEEE Trans. Geosci. Remote Sens. 2018, 57, 520–539. [Google Scholar] [CrossRef]
- Bauer-Marschallinger, B.; Cao, S.; Tupas, M.E.; Roth, F.; Navacchi, C.; Melzer, T.; Freeman, V.; Wagner, W. Satellite-Based Flood Mapping through Bayesian Inference from a Sentinel-1 SAR Datacube. Remote Sens. 2022, 14, 3673. [Google Scholar] [CrossRef]
- De Gelis, I.; Colin, A.; Longépé, N. Prediction of categorized sea ice concentration from Sentinel-1 SAR images based on a fully convolutional network. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5831–5841. [Google Scholar] [CrossRef]
- Taravat, A.; Wagner, M.P.; Oppelt, N. Automatic grassland cutting status detection in the context of spatiotemporal Sentinel-1 imagery analysis and artificial neural networks. Remote Sens. 2019, 11, 711. [Google Scholar] [CrossRef] [Green Version]
- Dostálová, A.; Lang, M.; Ivanovs, J.; Waser, L.T.; Wagner, W. European Wide Forest Classification Based on Sentinel-1 Data. Remote Sens. 2021, 13, 337. [Google Scholar] [CrossRef]
- Nagler, T.; Rott, H.; Ripper, E.; Bippus, G.; Hetzenecker, M. Advancements for snowmelt monitoring by means of sentinel-1 SAR. Remote Sens. 2016, 8, 348. [Google Scholar] [CrossRef] [Green Version]
- Salamon, P.; Mctlormick, N.; Reimer, C.; Clarke, T.; Bauer-Marschallinger, B.; Wagner, W.; Martinis, S.; Chow, C.; Böhnke, C.; Matgen, P.; et al. The new, systematic global flood monitoring product of the copernicus emergency management service. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1053–1056. [Google Scholar]
- VITO; JRC. Copernicus Global Land Service. 2023. Available online: https://land.copernicus.eu/global/ (accessed on 5 May 2023).
- Müller, M.M.; Vilà-Vilardell, L.; Vacik, H. Towards an integrated forest fire danger assessment system for the European Alps. Ecol. Inform. 2020, 60, 101151. [Google Scholar] [CrossRef]
- Zotta, R.M.; Atzberger, C.; Degenhart, J.; Hollaus, M.; Immitzer, M.; Krajnz, H.; Lick, H.; Müller, M.M.; Oblasser, H.; Schaffhauser, A.; et al. CONFIRM-Copernicus Data for Novel High-Resolution Wildfire Danger Services in Mountain Regions. In Proceedings of the EGU General Assembly 2020, Online, 4–8 May 2020. [Google Scholar] [CrossRef]
- Bruggisser, M.; Dorigo, W.; Dostálová, A.; Hollaus, M.; Navacchi, C.; Schlaffer, S.; Pfeifer, N. Potential of Sentinel-1 C-band time series to derive structural parameters of temperate deciduous forests. Remote Sens. 2021, 13, 798. [Google Scholar] [CrossRef]
- Small, D. Flattening gamma: Radiometric terrain correction for SAR imagery. IEEE Trans. Geosci. Remote Sens. 2011, 49, 3081–3093. [Google Scholar] [CrossRef]
- Rüetschi, M.; Schaepman, M.E.; Small, D. Using multitemporal sentinel-1 c-band backscatter to monitor phenology and classify deciduous and coniferous forests in northern switzerland. Remote Sens. 2017, 10, 55. [Google Scholar] [CrossRef] [Green Version]
- Dostalova, A.; Navacchi, C.; Greimeister-Pfeil, I.; Small, D.; Wagner, W. The effects of radiometric terrain flattening on SAR-based forest mapping and classification. Remote Sens. Lett. 2022, 13, 855–864. [Google Scholar] [CrossRef]
- Small, D.; Rohner, C.; Miranda, N.; Rüetschi, M.; Schaepman, M.E. Wide-area analysis-ready radar backscatter composites. IEEE Trans. Geosci. Remote Sens. 2021, 60, 1–14. [Google Scholar] [CrossRef]
- Kellndorfer, J.; Cartus, O.; Lavalle, M.; Magnard, C.; Milillo, P.; Oveisgharan, S.; Osmanoglu, B.; Rosen, P.A.; Wegmüller, U. Global seasonal Sentinel-1 interferometric coherence and backscatter data set. Sci. Data 2022, 9, 73. [Google Scholar] [CrossRef]
- Committee on Earth Observation Satellites. CEOS Analysis-Ready Data. 2022. Available online: https://ceos.org/ard/ (accessed on 11 September 2022).
- Truckenbrodt, J.; Freemantle, T.; Williams, C.; Jones, T.; Small, D.; Dubois, C.; Thiel, C.; Rossi, C.; Syriou, A.; Giuliani, G. Towards Sentinel-1 SAR analysis-ready data: A best practices assessment on preparing backscatter data for the cube. Data 2019, 4, 93. [Google Scholar] [CrossRef] [Green Version]
- Ticehurst, C.; Zhou, Z.S.; Lehmann, E.; Yuan, F.; Thankappan, M.; Rosenqvist, A.; Lewis, B.; Paget, M. Building a SAR-Enabled Data Cube Capability in Australia Using SAR analysis-ready Data. Data 2019, 4, 100. [Google Scholar] [CrossRef] [Green Version]
- Mullissa, A.; Vollrath, A.; Odongo-Braun, C.; Slagter, B.; Balling, J.; Gou, Y.; Gorelick, N.; Reiche, J. Sentinel-1 SAR Backscatter analysis-ready Data Preparation in Google Earth Engine. Remote Sens. 2021, 13, 1954. [Google Scholar] [CrossRef]
- GAMMA Remote Sensing. The GAMMA Software. 2021. Available online: https://www.gamma-rs.ch/software (accessed on 18 October 2021).
- ISCE. InSAR Scientific Computing Environment Version 3. 2022. Available online: https://github.com/isce-framework/isce3 (accessed on 16 November 2022).
- ESA. SNAP. 2022. Available online: https://step.esa.int/main/toolboxes/snap/ (accessed on 11 September 2022).
- CEOS. Analysis-Ready Data for Land: Normalised Radar Backscatter. 2021. Available online: https://ceos.org/ard/files/PFS/NRB/v5.5/CARD4L-PFS_NRB_v5.5.pdf (accessed on 11 September 2022).
- Shiroma, G.H.; Lavalle, M.; Buckley, S.M. An area-based projection algorithm for SAR radiometric terrain correction and geocoding. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–23. [Google Scholar] [CrossRef]
- Yuan, F.; Repse, M.; Leith, A.; Rosenqvist, A.; Milcinski, G.; Moghaddam, N.F.; Dhar, T.; Burton, C.; Hall, L.; Jorand, C.; et al. An Operational analysis-ready Radar Backscatter Dataset for the African Continent. Remote Sens. 2022, 14, 351. [Google Scholar] [CrossRef]
- Navacchi, C.; Cao, S.; Bauer-Marschallinger, B.; Snoeij, P.; Small, D.; Wagner, W. Utilising Sentinel-1’s orbital stability for efficient pre-processing of sigma nought backscatter. ISPRS J. Photogramm. Remote Sens. 2022, 192, 130–141. [Google Scholar] [CrossRef]
- Agram, P.S.; Warren, M.S.; Arko, S.A.; Calef, M.T. Radiometric Terrain Flattening of Geocoded Stacks of SAR Imagery. Remote Sens. 2023, 15, 1932. [Google Scholar] [CrossRef]
- Bourbigot, M.; Johnsen, H.; Piantanida, R. Sentinel-1 Product Definition; ESA: Paris, France, 2020; Available online: https://sentinels.copernicus.eu/documents/247904/0/Sentinel-1-Product-Definition/6049ee42-6dc7-4e76-9886-f7a72f5631f3 (accessed on 11 September 2022).
- Small, D.; Schubert, A. Guide to Sentinel-1 Geocoding—UZH-S1-GC-AD; Technical Report 1.10; University of Zurich: Zurich, Switzerland, 2019. [Google Scholar]
- Schreier, G. (Ed.) SAR Geocoding: Data and Systems; Wichmann: Karlsruhe, Germany, 1993. [Google Scholar]
- SNAP Team. SNAP 8.0 Released. 2021. Available online: https://step.esa.int/main/snap-8-0-released/ (accessed on 18 October 2021).
- Peters, M. Bulk Processing with GPT. 2021. Available online: https://senbox.atlassian.net/wiki/spaces/SNAP/pages/70503475/Bulk+Processing+with+GPT (accessed on 18 October 2021).
- ESA. POD Products and Requirements. 2023. Available online: https://sentinel.esa.int/web/sentinel/technical-guides/sentinel-1-sar/pod/products-requirements (accessed on 30 January 2023).
- Fahrland, E. Copernicus Digital Elevation Model Product Handbook; Version 4.0; Airbus: Toulouse, France, 2022; Available online: https://spacedata.copernicus.eu/documents/20123/121239/GEO1988-CopernicusDEM-SPE-002_ProductHandbook_I4.0.pdf (accessed on 11 September 2022).
- Agisoft. Global Models. 2021. Available online: https://www.agisoft.com/downloads/geoids/ (accessed on 18 October 2021).
- Shannon, C.E. A mathematical theory of communication. Bell Syst. Tech. J. 1948, 27, 379–423. [Google Scholar] [CrossRef] [Green Version]
- Woodhouse, I.H. Introduction to Microwave Remote Sensing; CRC Press: Boca Raton, FL, USA, 2005. [Google Scholar]
- Bauer-Marschallinger, B.; Sabel, D.; Wagner, W. Optimisation of global grids for high-resolution remote sensing data. Comput. Geosci. 2014, 72, 84–93. [Google Scholar] [CrossRef]
- Thomopoulos, N.T. Essentials of Monte Carlo Simulation: Statistical Methods for Building Simulation Models; Springer: New York, NY, USA, 2013. [Google Scholar]
- eoPortal. RADARSAT Constellation. 2012. Available online: https://www.eoportal.org/satellite-missions/rcm (accessed on 30 January 2023).
- ESA. Ride into Orbit Secured for Sentinel-1C. 2022. Available online: https://www.esa.int/Applications/Observing_the_Earth/Copernicus/Sentinel-1/Ride_into_orbit_secured_for_Sentinel-1C (accessed on 16 November 2022).
- Velev, K. Mission Quick Facts. 2022. Available online: https://nisar.jpl.nasa.gov/mission/quick-facts/ (accessed on 20 December 2022).
- Davidson, M.; Chini, M.; Dierking, W.; Djavidnia, S.; Haarpaintner, S.; Hajduch, G.; Laurin, V.G.; Lavalle, M.; Martinez, C.L.; Nagler, T.; et al. Copernicus L-Band SAR Mission Requirements Document; European Space Research and Technology Centre: Noordwijk, The Netherlands, 2019; Available online: https://esamultimedia.esa.int/docs/EarthObservation/Copernicus_L-band_SAR_mission_ROSE-L_MRD_v2.0_issued.pdf (accessed on 28 February 2023).
- Bauer-Marschallinger, B.; Cao, S.; Navacchi, C.; Freeman, V.; Reuß, F.; Geudtner, D.; Rommen, B.; Vega, F.C.; Snoeij, P.; Attema, E.; et al. The normalised Sentinel-1 Global Backscatter Model, mapping Earth’s land surface with C-band microwaves. Sci. Data 2021, 8, 277. [Google Scholar] [CrossRef] [PubMed]
- Quast, R.; Wagner, W.; Bauer-Marschallinger, B.; Vreugdenhil, M. Soil moisture retrieval from Sentinel-1 using a first-order radiative transfer model—A case-study over the Po-Valley. Remote Sens. Environ. 2023, 295, 113651. [Google Scholar] [CrossRef]
- Mäkynen, M.; Karvonen, J. Incidence angle dependence of first-year sea ice backscattering coefficient in Sentinel-1 SAR imagery over the Kara Sea. IEEE Trans. Geosci. Remote. Sens. 2017, 55, 6170–6181. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Workflow | Ov. fac. | Scene Prep. | Aux. Data Prep. | RTC | Data Export | Total | w.r.t. Wizsard (Base) | |
|---|---|---|---|---|---|---|---|---|
| Norway | wizsard (base) | 1 | 42 s | 10 s | 11 min 56 s | 9 s | 12 min 57 s | - |
| wizsard (base) | 2 | 43 s | 31 s | 32 min 45 s | 9 s | 34 min 8 s | - | |
| wizsard (static ) | 1 | 42 s | 13 s | 10 min 45 s | 9 s | 11 min 49 s | −9% | |
| wizsard (static ) | 2 | 42 s | 46 s | 26 min 50 s | 9 s | 28 min 27 s | −17% | |
| wizsard (single LUT) | 1 | 42 s | 13 s | 6 min 26 s | 10 s | 7 min 31 s | −42% | |
| wizsard (single LUT) | 2 | 44 s | 45 s | 23 min 5 s | 15 s | 24 min 49 s | −27% | |
| wizsard (RTC-AP) | 1 | 42 s | 13 s | 27 min 35 s | 10 s | 28 min 40 s | +121% | |
| wizsard (RTC-AP) | 2 | 43 s | 52 s | 106 min 17 s | 14 s | 108 min 6 s | +217% | |
| SNAP 8 | 1 | - | - | - | - | 661 min 38 s | +5009% | |
| wizsard () | 1 | - | - | - | - | 5 min 52 s | −55% | |
| Austria | wizsard (base) | 1 | 44 s | 6 s | 6 min 10 s | 4 s | 7 min 4 s | - |
| wizsard (base) | 2 | 44 s | 15 s | 16 min 28 s | 4 s | 17 min 31 s | - | |
| wizsard (static ) | 1 | 44 s | 7 s | 5 min 27 s | 5 s | 6 min 23 s | −10% | |
| wizsard (static ) | 2 | 44 s | 23 s | 13 min 50 s | 4 s | 15 min 1 s | −14% | |
| wizsard (single LUT) | 1 | 44 s | 7 s | 3 min 20 s | 4 s | 4 min 15 s | −40% | |
| wizsard (single LUT) | 2 | 44 s | 23 s | 11 min 41 s | 5 s | 12 min 53 s | −26% | |
| wizsard (RTC-AP) | 1 | 44 s | 7 s | 15 min 10 s | 5 s | 16 min 6 s | +128% | |
| wizsard (RTC-AP) | 2 | 44 s | 24 s | 54 min 35 s | 4 s | 55 min 47 s | +218% | |
| SNAP 8 | 1 | - | - | - | - | 257 min 44 s | +3556% | |
| wizsard () | 1 | - | - | - | - | 3 min 17 s | −53% | |
| Benin | wizsard (base) | 1 | 43 s | 4 s | 4 min 24 s | 3 s | 5 min 14 s | - |
| wizsard (base) | 2 | 43 s | 11 s | 11 min 42 s | 3 s | 12 min 39 s | - | |
| wizsard (static ) | 1 | 43 s | 5 s | 3 min 55 s | 3 s | 4 min 46 s | −9% | |
| wizsard (static ) | 2 | 43 s | 16 s | 9 min 48 s | 3 s | 10 min 50 s | −14% | |
| wizsard (single LUT) | 1 | 42 s | 5 s | 2 min 22 s | 3 s | 3 min 12 s | −39% | |
| wizsard (single LUT) | 2 | 43 s | 16 s | 8 min 13 s | 3 s | 9 min 15 s | −27% | |
| wizsard (RTC-AP) | 1 | 43 s | 5 s | 10 min 24 s | 3 s | 11 min 15 s | +115% | |
| wizsard (RTC-AP) | 2 | 43 s | 16 s | 38 min 18 s | 3 s | 39 min 20 s | +211% | |
| SNAP 8 | 1 | - | - | - | - | 63 min 4 s | +1105% | |
| wizsard () | 1 | - | - | - | - | 2 min 29 s | −53% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Navacchi, C.; Cao, S.; Bauer-Marschallinger, B.; Snoeij, P.; Small, D.; Wagner, W. Utilising Sentinel-1’s Orbital Stability for Efficient Pre-Processing of Radiometric Terrain Corrected Gamma Nought Backscatter. Sensors 2023, 23, 6072. https://doi.org/10.3390/s23136072
Navacchi C, Cao S, Bauer-Marschallinger B, Snoeij P, Small D, Wagner W. Utilising Sentinel-1’s Orbital Stability for Efficient Pre-Processing of Radiometric Terrain Corrected Gamma Nought Backscatter. Sensors. 2023; 23(13):6072. https://doi.org/10.3390/s23136072
Chicago/Turabian StyleNavacchi, Claudio, Senmao Cao, Bernhard Bauer-Marschallinger, Paul Snoeij, David Small, and Wolfgang Wagner. 2023. "Utilising Sentinel-1’s Orbital Stability for Efficient Pre-Processing of Radiometric Terrain Corrected Gamma Nought Backscatter" Sensors 23, no. 13: 6072. https://doi.org/10.3390/s23136072