Author Contributions
Conceptualization, K.K., P.L., M.K. and P.W.; methodology, K.K. and P.L.; data analysis, M.K. and P.W.; investigation, P.L. and K.K.; formal analysis, P.W.; writing—original draft, P.L. and K.K.; writing—review and editing, P.W. and M.K.; project administration, M.K.; supervision: P.W. and M.K.; funding acquisition, M.K. All authors have read and agreed to the published version of the manuscript.
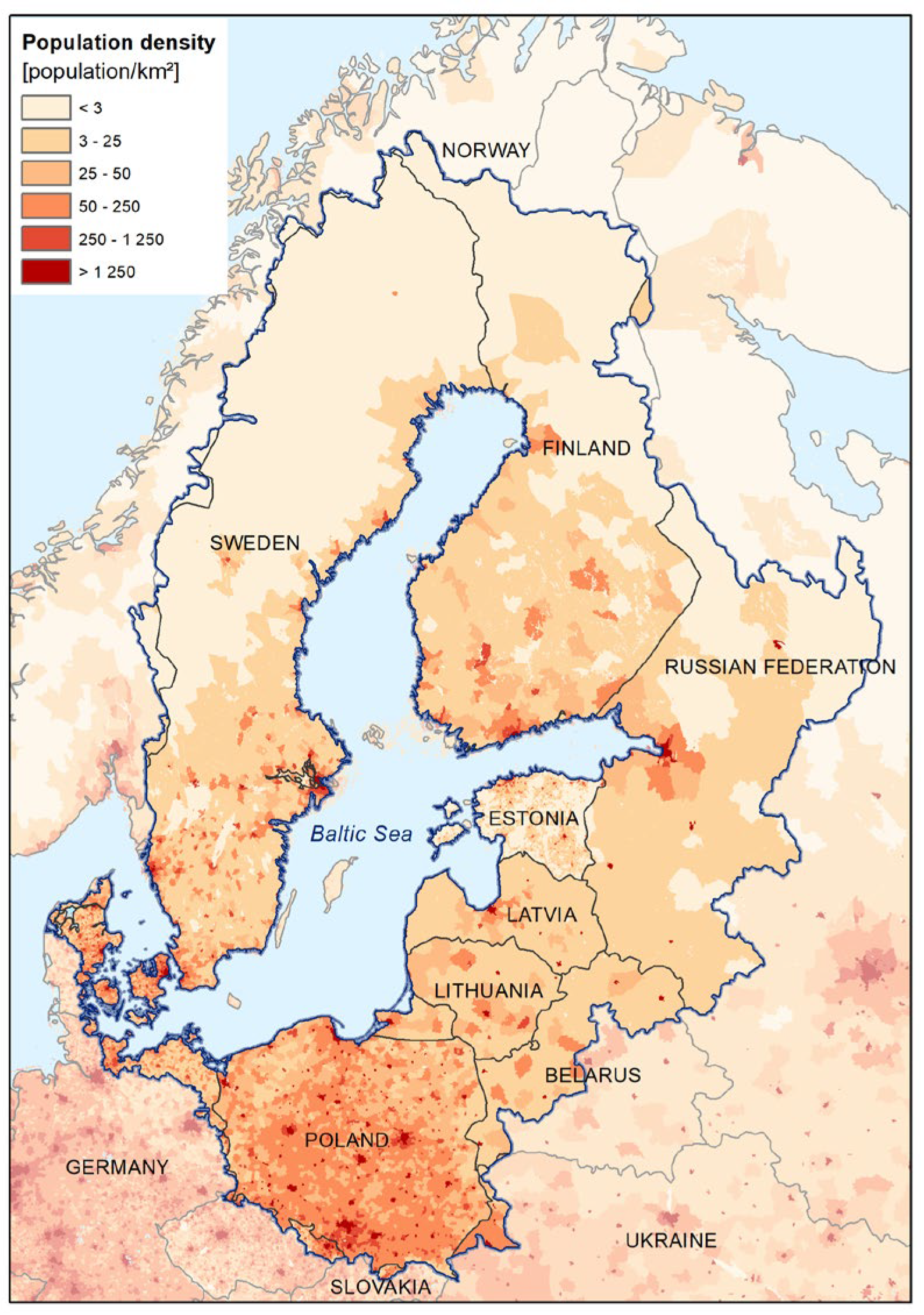
Figure 1.
Catchment of the Baltic Sea and the population density in the area.
Figure 1.
Catchment of the Baltic Sea and the population density in the area.
Figure 2.
Longitudinal and latitudinal reach of the area of interest and the main rivers.
Figure 2.
Longitudinal and latitudinal reach of the area of interest and the main rivers.
Figure 3.
The problem of averaging the value of the pixel: (a) river whose width equals one times the GSD; (b) expected representation of the river in the image.
Figure 3.
The problem of averaging the value of the pixel: (a) river whose width equals one times the GSD; (b) expected representation of the river in the image.
Figure 4.
Period of revisit for remote sensing missions used in water management.
Figure 4.
Period of revisit for remote sensing missions used in water management.
Figure 5.
Flow chart of designing the constellation of satellites.
Figure 5.
Flow chart of designing the constellation of satellites.
Figure 6.
Values that are considered for determining the spatial resolution and orbit altitude.
Figure 6.
Values that are considered for determining the spatial resolution and orbit altitude.
Figure 7.
Angles α, β, γ in the constellation Walker Delta 90°: 16/4/1.
Figure 7.
Angles α, β, γ in the constellation Walker Delta 90°: 16/4/1.
Figure 8.
Density of probability distribution for the latitude for inclinations 58.0° and 97.4°.
Figure 8.
Density of probability distribution for the latitude for inclinations 58.0° and 97.4°.
Figure 9.
Percentage of time of coverage for the satellite of an inclination of 97.4° depending on latitude.
Figure 9.
Percentage of time of coverage for the satellite of an inclination of 97.4° depending on latitude.
Figure 10.
Percentage of time of coverage for the satellite at an inclination of 58.0° depending on latitude.
Figure 10.
Percentage of time of coverage for the satellite at an inclination of 58.0° depending on latitude.
Figure 11.
Access of a single satellite to imaging the main rivers with use of FOR.
Figure 11.
Access of a single satellite to imaging the main rivers with use of FOR.
Figure 12.
Ground tracks of a satellite during access to imaging the main rivers in the period from 1 July 2023 00:00:00 UTCG to 8 July 2023 00:00:00 UTCG.
Figure 12.
Ground tracks of a satellite during access to imaging the main rivers in the period from 1 July 2023 00:00:00 UTCG to 8 July 2023 00:00:00 UTCG.
Figure 13.
Ground tracks of a satellite during access to imaging the main rivers in the period from 24 July 2023 00:00:00 UTCG to 1 August 2023 00:00:00 UTCG.
Figure 13.
Ground tracks of a satellite during access to imaging the main rivers in the period from 24 July 2023 00:00:00 UTCG to 1 August 2023 00:00:00 UTCG.
Figure 14.
Presentation of the positioning of nanosatellites in Project 1 constellation and the area of interest (AOI).
Figure 14.
Presentation of the positioning of nanosatellites in Project 1 constellation and the area of interest (AOI).
Figure 15.
Access of two satellites in a constellation to imaging the main rivers with use of FOR.
Figure 15.
Access of two satellites in a constellation to imaging the main rivers with use of FOR.
Figure 16.
Accessibility of imaging of the area of interest for Project 1 constellation, determined with the use of FOR.
Figure 16.
Accessibility of imaging of the area of interest for Project 1 constellation, determined with the use of FOR.
Figure 17.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 2.
Figure 17.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 2.
Figure 18.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 3.
Figure 18.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 3.
Figure 19.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 4.
Figure 19.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 4.
Figure 20.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 5.
Figure 20.
Imaging access and percentage of coverage of all rivers with use of FOR for Project 5.
Figure 21.
Presentation of the positioning of nanosatellites in Project 4 constellation and the area of interest (AOI).
Figure 21.
Presentation of the positioning of nanosatellites in Project 4 constellation and the area of interest (AOI).
Table 1.
Range of width of the main rivers depending on the section.
Table 1.
Range of width of the main rivers depending on the section.
| River Name | River Bed Width |
|---|
| Upstream | Midstream | Downstream |
|---|
| Odra | 10–70 m | 50–250 m | 100–200 m |
| Vistula | 20–250 m | 200–1500 m | 250–1000 m |
| Niemen | 10–100 m | 80–250 m | 200–300 m |
| Dźwina | 20–100 m | 70–300 m | 120–280 m |
Table 2.
The objectives and requirements of the satellite mission.
Table 2.
The objectives and requirements of the satellite mission.
| Type of Orbit | LEO, Circular |
|---|
| Size of the area of interest | 13° E–33° E, 49° N–58° N |
| Spatial resolution—(GSD) | 5 m |
| Spectral resolution | minimum 5 channels in the VNIR range |
| Revisit period | 3 days |
Table 3.
Main parameters of the considered sensors [
32,
33,
34].
Table 3.
Main parameters of the considered sensors [
32,
33,
34].
| | Caiman Imager | MultiScape100 CIS | HyperScape100 |
|---|
| GSDnadir for 500 km | PAN: 3.0 m
MS: 6.0 m | 4.75 m | 4.75 m |
| Swathnadir for 500 km | 12 km | 19.4 km | 19.4 km |
| Spectral resolution | 7 VNIR channels | 7 VNIR channels | 32 VNIR channels |
| Radiometric resolution | 8 or 16 bit | 10 bit | 10 bit |
| Focal length | - | 580 mm ± 1 mm | 580 mm ± 1 mm |
| FOV | - | 2.22° × 1.66° | 2.22° × 1.66° |
| Pixel size | - | 5.5 μm | 5.5 μm |
| Weight | 1.8 kg | 1.1 kg | 1.1 kg |
| Dimensions | 10 × 10 × 23 cm | 9.8 × 9.8 × 17.6 cm | 9.8 × 9.8 × 17.6 cm |
| Platform size | min. 6 U | min. 3 U | min. 3 U |
Table 4.
Data used in calculations and the calculated values.
Table 4.
Data used in calculations and the calculated values.
| Data | Calculated Values |
|---|
| |
| |
| |
| = 19.1 km |
| = 21.6 km |
Table 5.
Percentage of time of coverage of latitudes depending on inclination.
Table 5.
Percentage of time of coverage of latitudes depending on inclination.
| Latitude | Inclination |
|---|
| 97.4° | 58.0° |
|---|
| 49° | 0.02% | 0.04% |
| 55° | 0.03% | 0.07% |
| 58° | 0.03% | 0.03% |
Table 6.
Accessibility of river imaging for Project 1 constellation, determined with the use of FOR.
Table 6.
Accessibility of river imaging for Project 1 constellation, determined with the use of FOR.
| River Name | Analysed Period |
|---|
| 1–3 July 2023 | 15–17 July 2023 | 29–31 July 2023 |
|---|
| Odra | 100.00% | 100.00% | 21.94% |
| Vistula | 44.86% | 100.00% | 9.03% |
| Niemen | 100.00% | 87.64% | 100.00% |
| Daugava | 100.00% | 100.00% | 74.08% |
Table 7.
Parameters of nanosatellites in constellations.
Table 7.
Parameters of nanosatellites in constellations.
| Satellite | Constellation |
|---|
| Project 2 | Project 3 | Project 4 | Project 5 |
|---|
| i | Ω | TA | i | Ω | TA | i | Ω | TA | i | Ω | TA |
|---|
| nano1 | 58° | 0° | 0° | 58° | 0° | 0° | 58° | 90° | 180° | 58° | 0° | 0° |
| nano2 | 58° | 90° | 0° | 58° | 0° | 90° | 58° | 270° | 180° | 58° | 180° | 90° |
| nano3 | 58° | 180° | 0° | 58° | 180° | 180° | 122° | 180° | 0° | 122° | 90° | 180° |
| nano4 | 58° | 270° | 0° | 58° | 180° | 270° | 122° | 0° | 0° | 122° | 270° | 270° |
Table 8.
Imaging accesses of the constellation to the rivers with use of FOR in the period 1–3 July 2023.
Table 8.
Imaging accesses of the constellation to the rivers with use of FOR in the period 1–3 July 2023.
| River Name | Project 2 | Project 3 | Project 4 | Project 5 |
|---|
| Odra | 12 | 12 | 11 | 12 |
| Vistula | 18 | 14 | 15 | 14 |
| Niemen | 17 | 12 | 17 | 15 |
| Daugava | 30 | 24 | 31 | 34 |
Table 9.
Time of achieving accumulated coverage of 95%.
Table 9.
Time of achieving accumulated coverage of 95%.
| River Name | Project 2 | Project 3 | Project 4 | Project 5 |
|---|
| Odra | 6 h 48 min | 12 h 42 min | 12 h 53 min | 7 h 0 min |
| Vistula | 54 h 01 min | 36 h 19 min | 12 h 53 min | 30 h 59 min |
| Niemen | 11 h 29 min | 11 h 29 min | 6 h 0 min | 5 h 50 min |
| Daugava | 5 h 11 min | 7 h 49 min | 8 h 19 min | 11 h 30 min |























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}