Using a SPATIAL INS/GNSS MEMS Unit to Detect Local Gravity Variations in Static and Mobile Experiments: First Results

 , , ,
, , ,
Abstract
:1. Introduction
2. State of the Art
3. Materials and Model
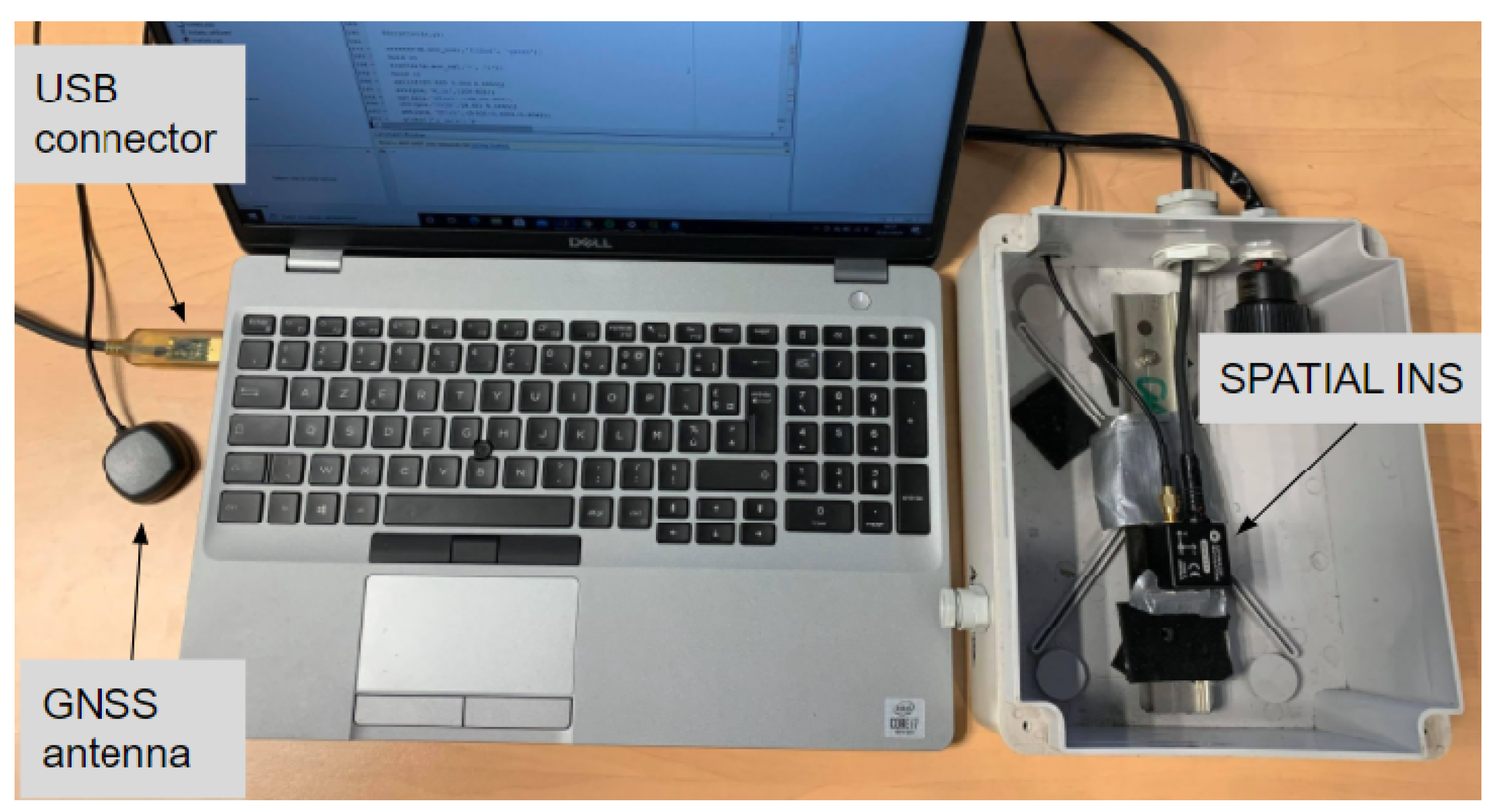
3.1. Inertial Navigation System—SPATIAL
3.2. Reference—CG-5 Autograv Gravimeter
3.3. Drone—Boreal LAB
3.4. Earth Tide Model Used
4. Static, Mobile and Airborne Mission
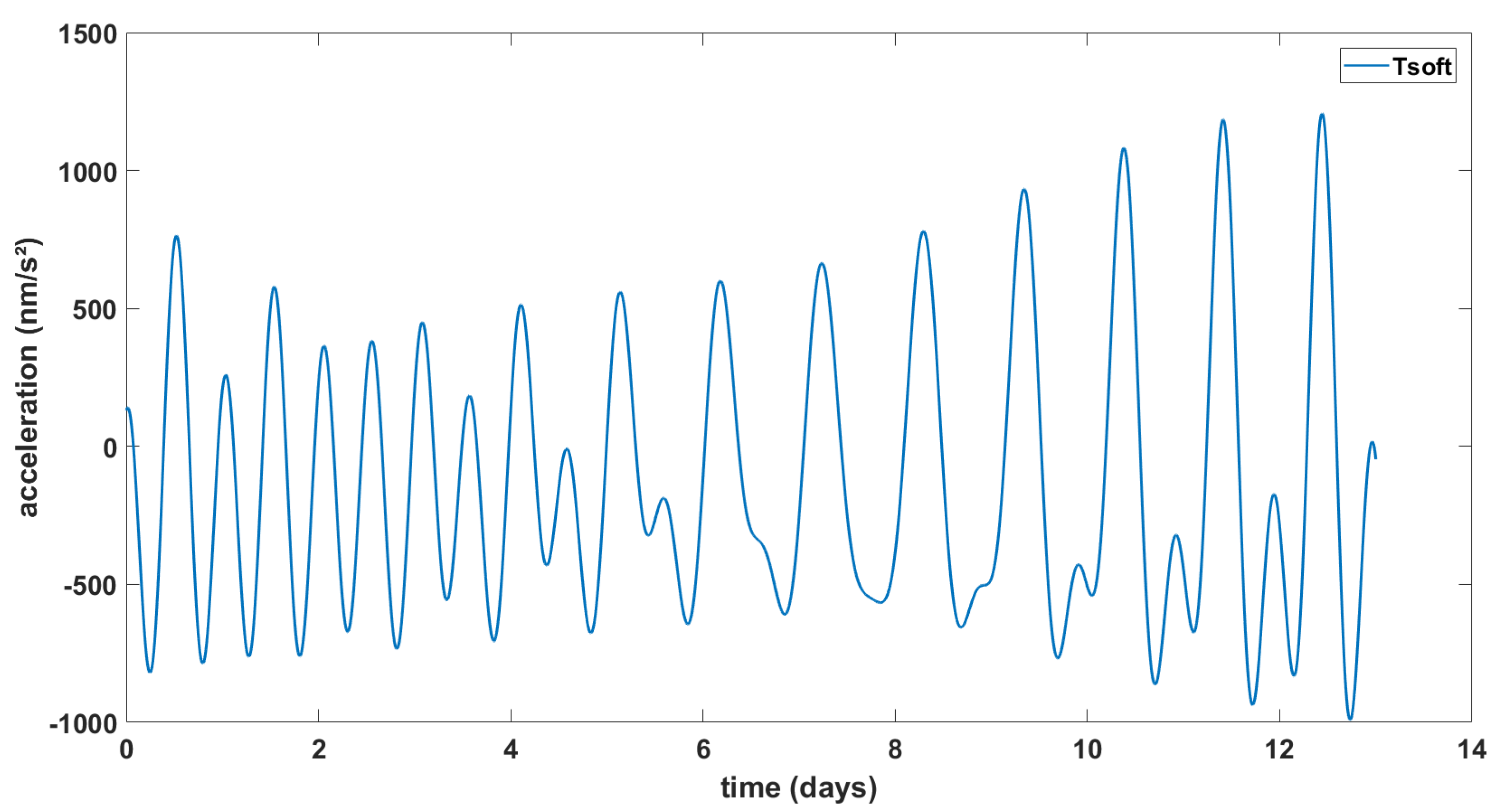
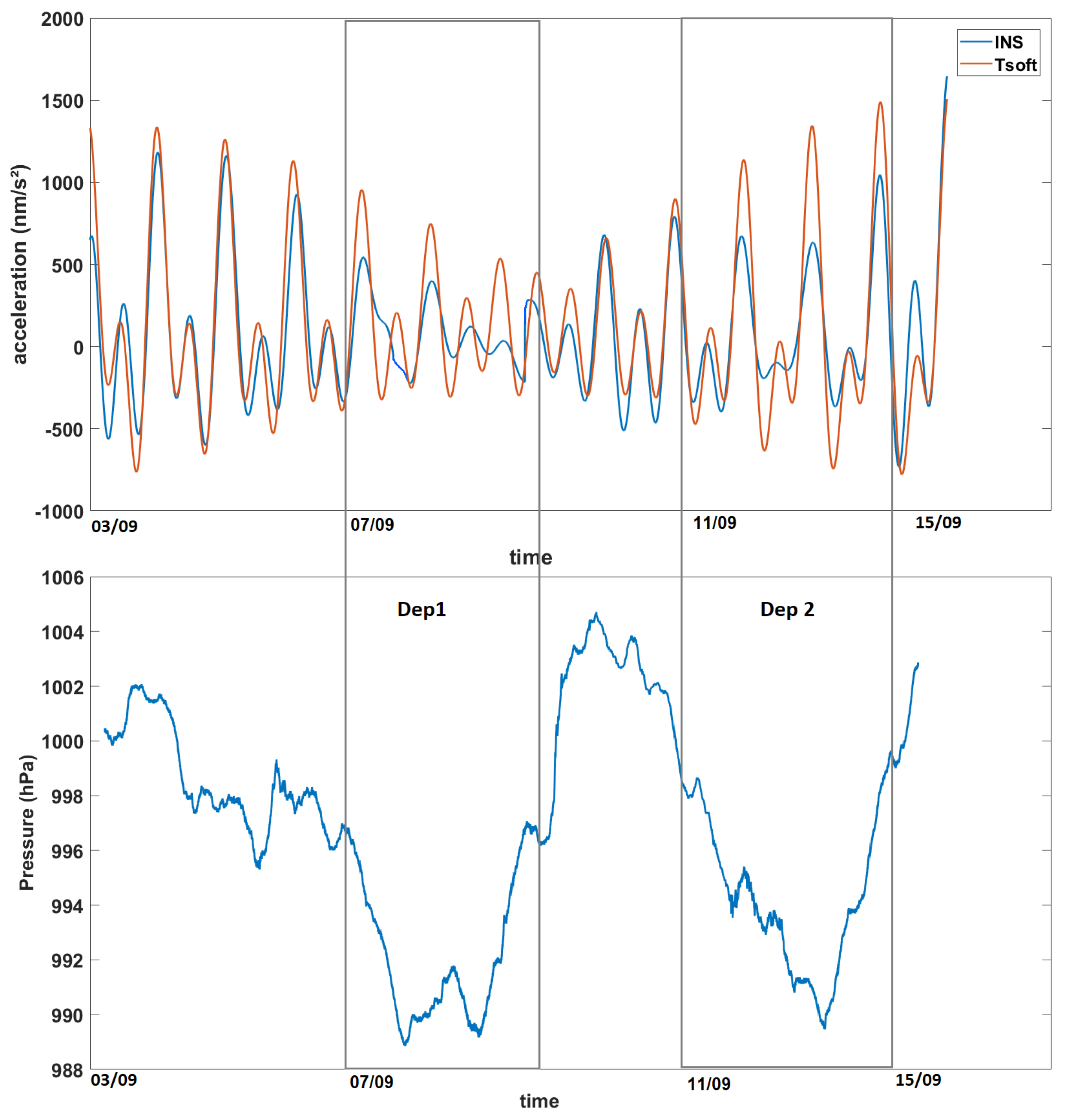
4.1. Solid Earth Tides (Static Mode)
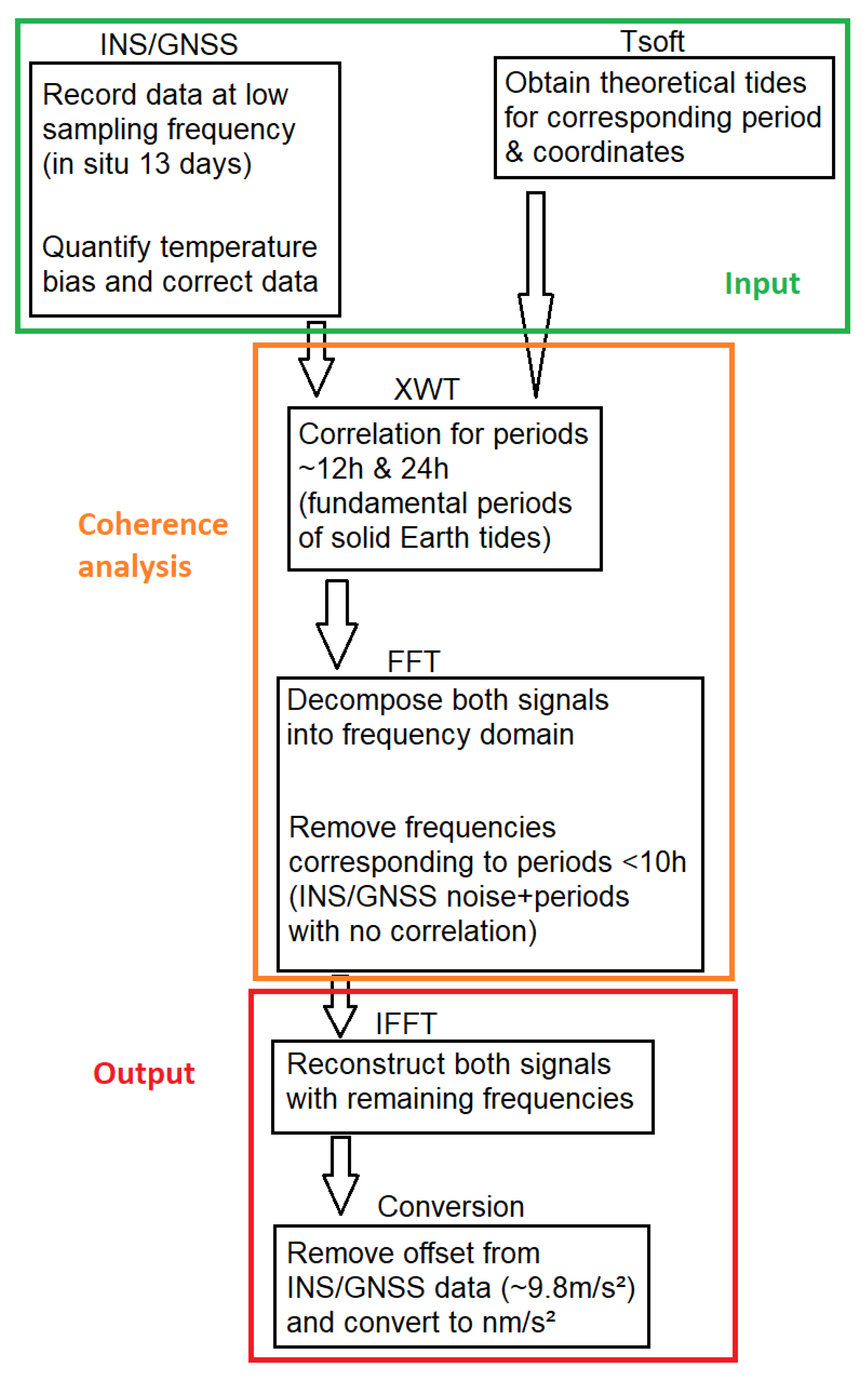
4.1.1. Methodology of In Situ Experiment at the GET Laboratory
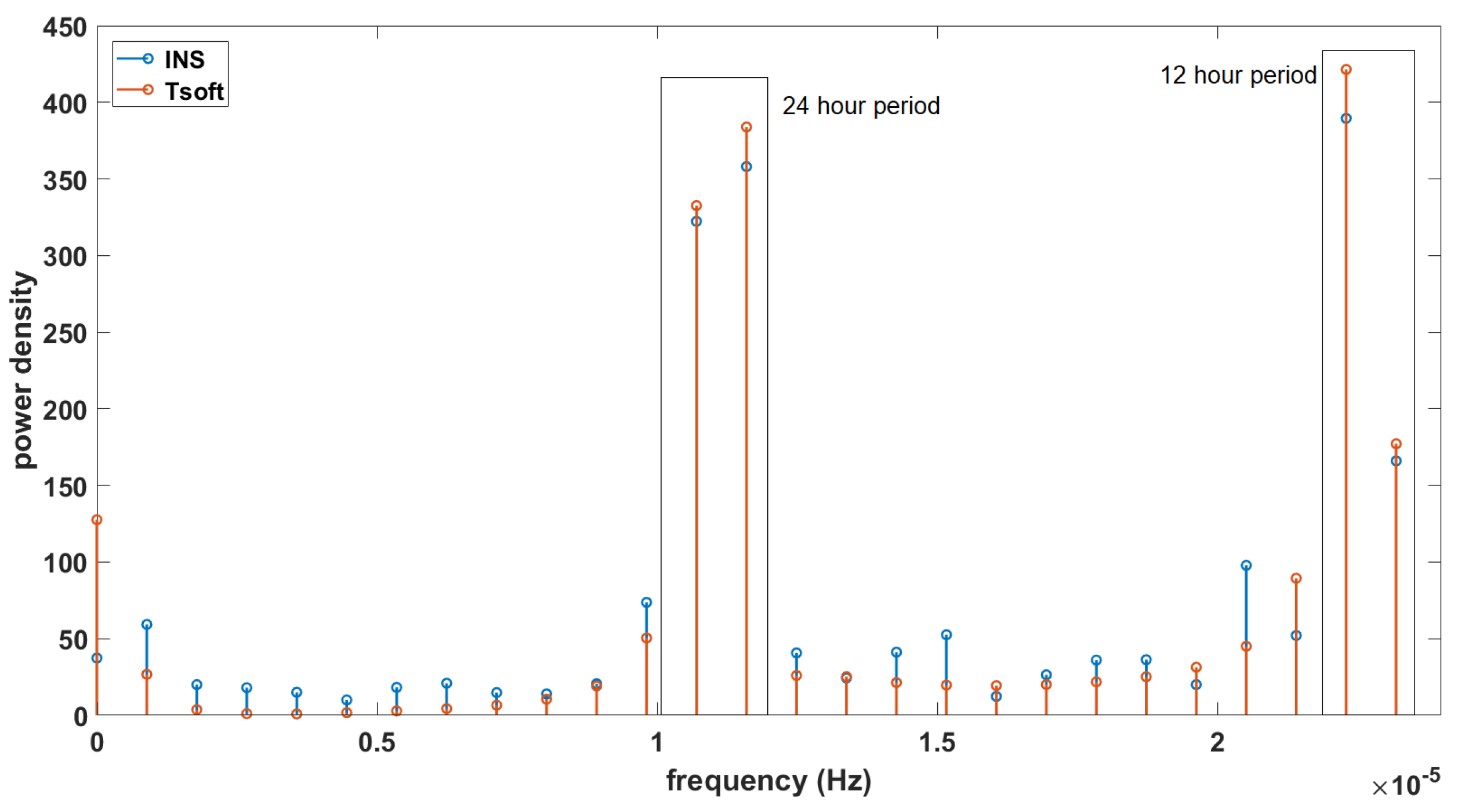
4.1.2. Results of In Situ Experiment
4.2. Altitude Variations (Mobile)
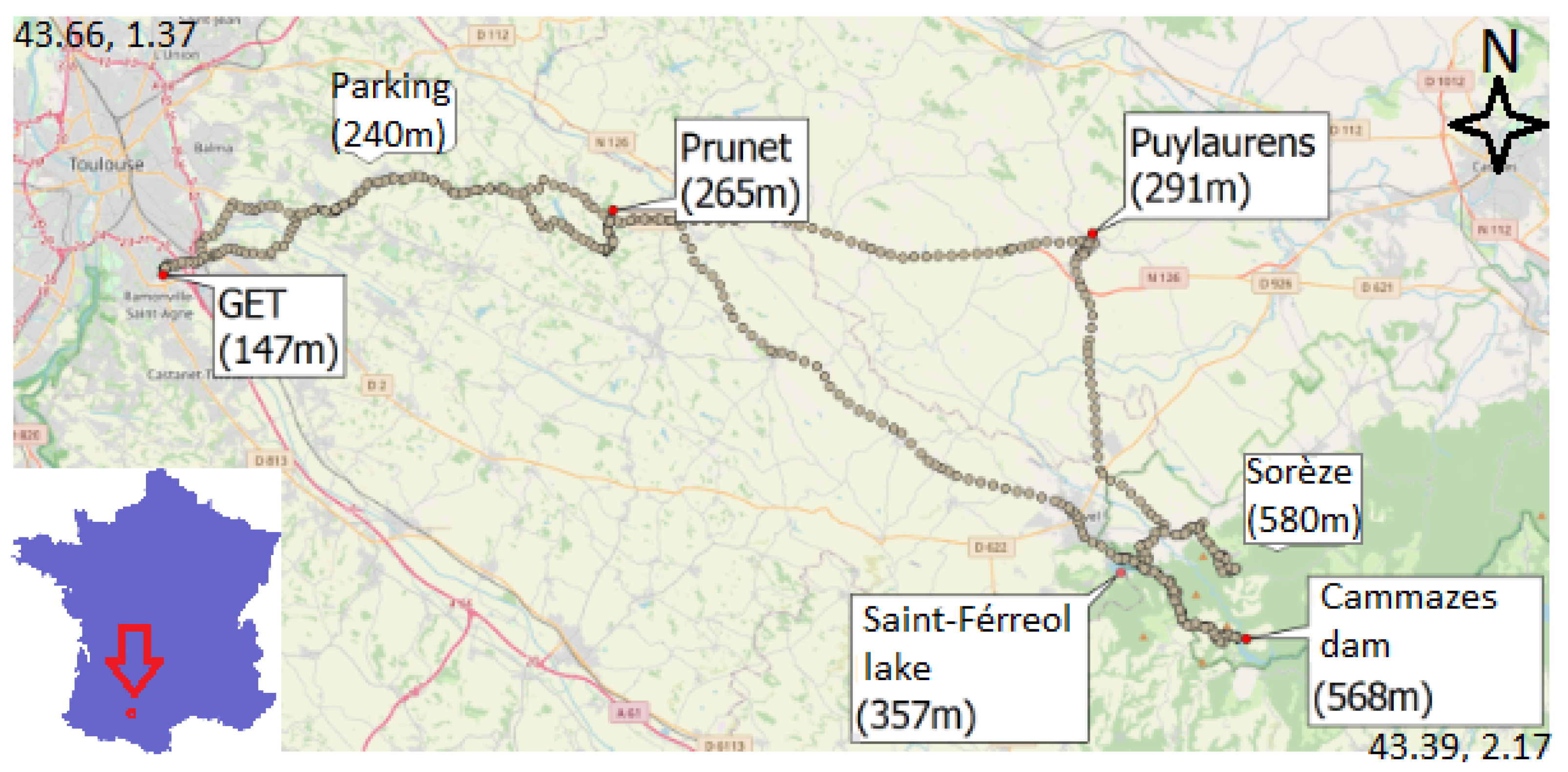
4.2.1. Methodology of Cammazes Dam Excursion
4.2.2. Results of Mobile Experiment
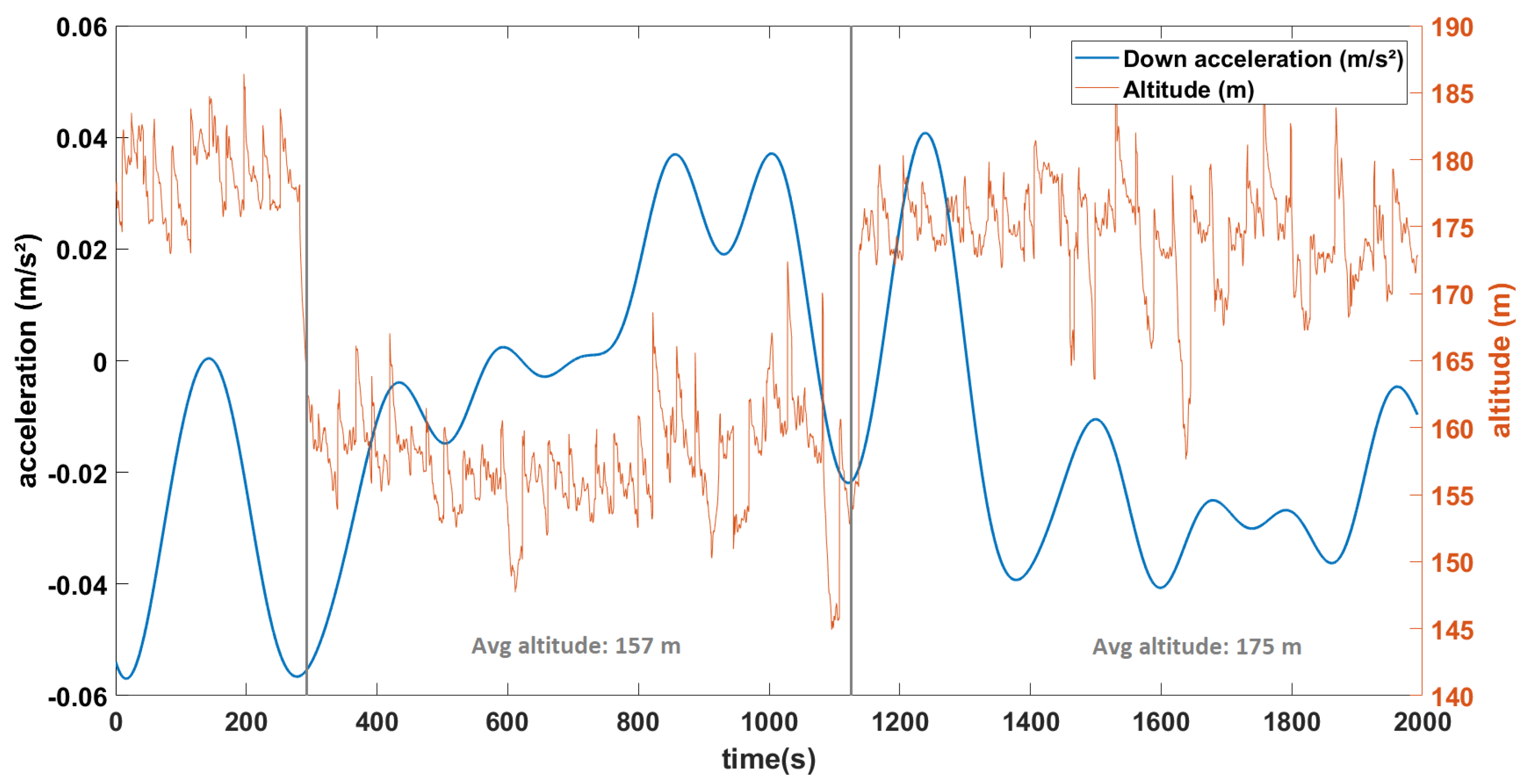
4.3. Altitude Variations (Airborne)
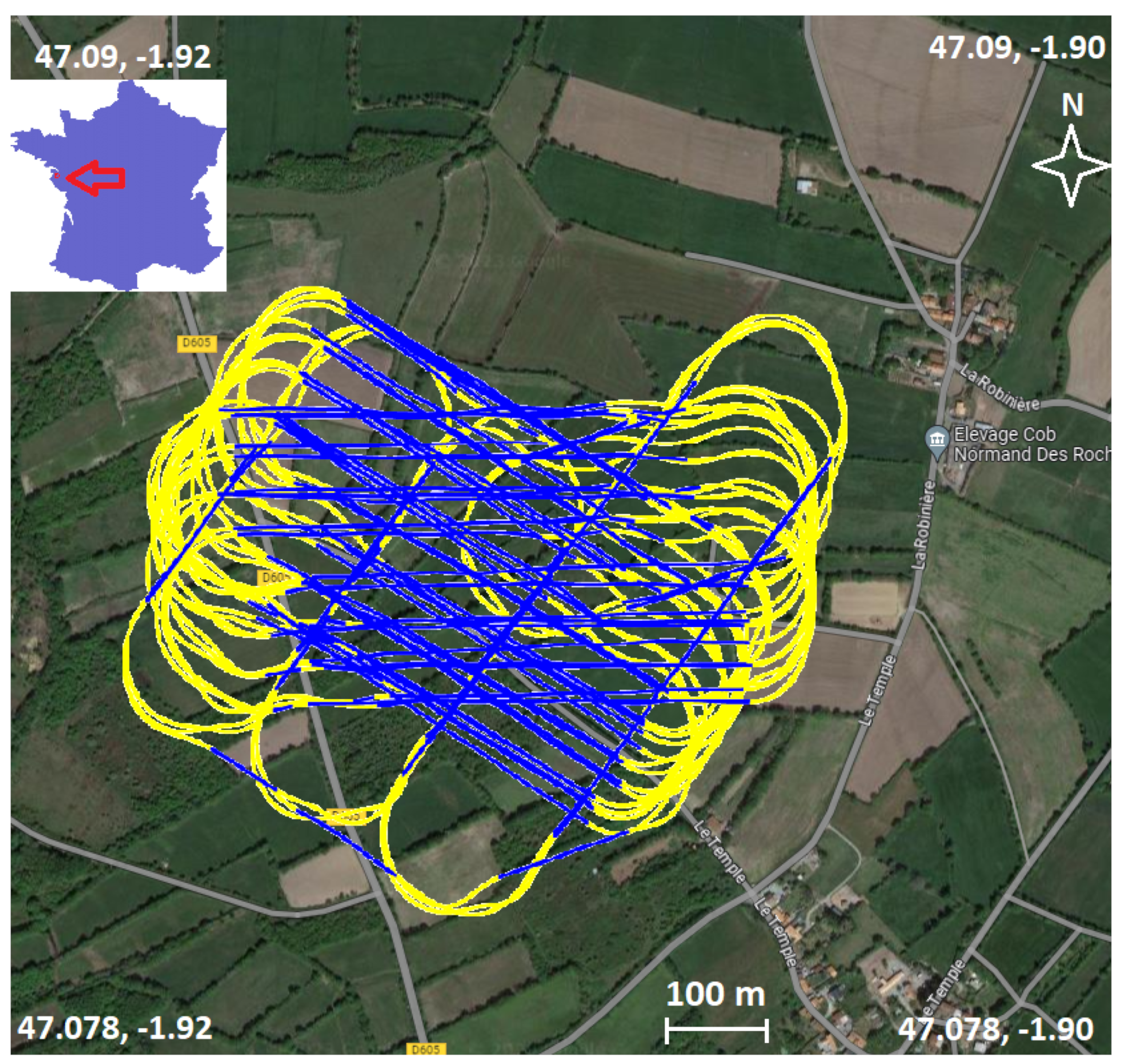
4.3.1. Methodology of Drone Flight Survey
4.3.2. Results of Airborne Gravimetry Experiment
5. Discussion of the Results for All Three Experiments
6. Conclusions and Perspectives
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| INS | Inertial navigation system |
| SINS | Strapdown inertial navigation system |
| GNSS | Global navigation satellite system |
| MEMS | Microelectronic mechanical systems |
| UAV | Unmanned aerial vehicle |
| GPS | Global Positioning System |
| GET | Géosciences Environnement Toulouse |
| FFT | Fast Fourier Transform |
| IFFT | Inverse Fast Fourier Transform |
| RMSE | Root-Mean-Square error |
| GRACE | Gravity Recovery and Climate Experiment |
| CHAMP | Challenging Minisatellite Payload |
| GOCE | Gravity Field and Steady-State Ocean Circulation Explorer |
References
- Lin, C.; Chiang, K.; Kuo, C. Development of INS/GNSS UA-Borne Vector Gravimetry System. IEEE Geosci. Remote Sens. Lett. 2017, 14, 315–333. [Google Scholar] [CrossRef]
- Gerlach, C.; Dorobantu, R. A Testbed for Airborne Inertial Geodesy: Terrestrial Gravimetry Experiment by INS/GPS. Proceedings od the CD, IAG Symposium on Gravity, Geoid and Space Missions (GGSM 2004), Porto, Portugal, 30 August–3 September 2004. [Google Scholar]
- Featherstone, W.E. Improvement to long-wavelength Australian gravity anomalies expected from the CHAMP, GRACE and GOCE dedicated satellite gravimetry missions. Explor. Geophys. 2003, 34, 69–76. [Google Scholar] [CrossRef]
- Flechtner, F.; Reigber, C.; Rummerl, R.; Balmino, G. Satellite Gravimetry: A review of its realization. Surv. Geophys. 2021, 42, 1029–1074. [Google Scholar] [CrossRef] [PubMed]
- Harriet, C.P.; Lau, S.M. A Journey through Tides, Chapter 15 Solid Earth Tides; Elsevier: Amsterdam, The Netherlands, 2023; pp. 365–387. ISBN 9780323908511. [Google Scholar] [CrossRef]
- Jekeli, C. Inertial Navigation Systems with Geodetic Applications; Walter de Gruyter: Berlin, Germany, 2001. [Google Scholar]
- Kwon, J.H.; Jekeli, C. A new approach for airborne vector gravimetry using GPS/INS. J. Geod. 2000, 74, 690–700. [Google Scholar] [CrossRef]
- Zhang, K.D. Research on the Methods of Airborne Gravimetry Based on SINS/DGPS; National University of Defense Technology: Changsha, China, 2007. [Google Scholar]
- Cai, S.; Wu, M.; Zhang, K.; Cao, J.; Tuo, Z.; Huang, Y. The first airborne scalar gravimetry system based on SINS/DGPS in China. Sci. China Earth Sci. 2013, 56, 2198–2208. [Google Scholar] [CrossRef]
- Senobari, M.S. New results in airborne vector gravimetry using strapdown INS/DGPS. J. Geod. 2010, 84, 277–291. [Google Scholar] [CrossRef]
- Xia, Z.; Sun, Z.M. The technology and application of airborne gravimetry. Sci. Surv. Mapp. 2006, 31, 43–46. [Google Scholar]
- Tang, S.; Liu, H.; Yan, S.; Xu, X.; Wu, W.; Fan, J.; Tu, L. A high-sensitivity MEMS gravimeter with a large dynamic range. Microsystems Nanoeng. 2019, 5, 45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Prasad, A.; Middlemiss, R.P.; Noack, A.; Anastasiou, K.; Bramsiepe, S.G.; Toland, K.; Utting, P.R.; Paul, D.J.; Hammond, G.D. A 19 day earth tide measurement with a MEMS gravimeter. Sci. Rep. 2022, 12, 13091. [Google Scholar] [CrossRef] [PubMed]
- De Saint Jean, B. Étude et Développement d’un Système de Gravimétrie Mmobile. Ph.D. Thesis, Observatoire de Paris, Paris, France, 2008. [Google Scholar]
- Verdun, J.; Roussel, C.; Cali, J.; Maia, M.; D’Eu, J.F.; Kharbou, O.; Poitou, C.; Ammann, J.; Durand, F.; Bouhier, M.E. Development of a Lightweight Inertial Gravimeter for Use on Board an Autonomous Underwater Vehicle: Measurement Principle, System Design and Sea Trial Mission. Remote Sens. 2022, 14, 2513. [Google Scholar] [CrossRef]
- Luo, K.; Cao, J.; Wang, C.; Cai, S.; Yu, R.; Wu, M.; Yang, B.; Xiang, W. First unmanned aerial vehicle airborne gravimetry based on the CH-4 UAV in China. J. Appl. Geophys. 2022, 206, 104835. [Google Scholar] [CrossRef]
- Cai, S.K.; Zhang, K.D.; Wu, M.P.; Cao, J.L. Airborne Vector Gravimetry based on SINS/DGPS. Hydrogr. Surv. Charting 2015, 3, 30–34. [Google Scholar]
- Cai, S.K.; Zhang, K.D.; Wu, M.P. Study on Airborne Gravity Vector Measurement and Error Separation Method; National Defense Industry Press: Beijing, China, 2015; pp. 2–3. [Google Scholar]
- Alaoui-Sosse, S.; Durand, P.; Médina, P. In Situ Observations of Wind Turbines Wakes with Unmanned Aerial Vehicle BOREAL within the MOMEMTA Project. Atmosphere 2022, 13, 775. [Google Scholar] [CrossRef]
- Alaoui-Sosse, S.; Durand, P.; Medina, P.; Pastor, P.; Gavart, M.; Pizziol, S. Boreal, a Fixed-Wing Unmanned Aerial System for the Measurement of Wind and Turbulence in the Atmospheric Boundary Layer. J. Atmos. Ocean. Technol. 2022, 39, 387–402. [Google Scholar] [CrossRef]
- Van Camp, M.; Vauterin, P. Tsoft: Graphical and interactive software for the analysis of time series and Earth tides. Comput. Geosci. 2005, 31, 631–640. [Google Scholar] [CrossRef]
- Na, S.-H. Prediction of Earth tide. In Basics of Computational Geophysics; Elsevier: Amsterdam, The Netherlands, 2021. [Google Scholar] [CrossRef]
- Grinsted, A.; Moore, J.C.; Jevrejeva, S. Application of the cross wavelet transform and wavelet coherence to geophysical time series. Nonlinear Process. Geophys. 2004, 11, 561–566. [Google Scholar] [CrossRef]
- Gaillot, P.; Darrozes, J.; de Saint Blanquat, M.; Ouillon, G. The normalised anisotropic wavelet coefficient (NOAWC) Method: An image processing tool for multi-scale analysis of rock fabric. Geophys. Res. Lett. 1997, 24, 1819–1822. [Google Scholar] [CrossRef]
- Slabaugh, G.G. Computing Euler angles from a rotation matrix. Retrieved August 2000, 6, 39–63. [Google Scholar]
- Lambert, W.D. The International Gravity Formula; U.S. Coast and Geodetic Survey: Washington, DC, USA, 1945. [Google Scholar]
- Schwartz, R.; Lindau, A. Das europaische Gravitationszonenkonzept nach WELMEC für eichpflichtige Waagen. PTB-Mitteilungen 2003, 113, 35–42. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Horizontal position accuracy (with L1 RTK) | 0.02 m |
| Vertical position accuracy (with L1 RTK) | 0.03 m |
| Velocity accuracy | 0.05 m/s |
| Roll and pitch accuracy (dynamic) | 0.2° |
| Heading accuracy (dynamic with GNSS) | 0.2° |
| Parameter | Accelerometers | Gyroscopes |
|---|---|---|
| Bias instability | 20 µ g | 3/h |
| Initial bias | <5 mg | <0.2/s |
| Scale factor stability | <0.06% | <0.05% |
| Noise density | 100 µg/ | 0.004°/s/ |
| Embedded Sensor | Fused Quartz w/ Electrostatic Nulling |
|---|---|
| Resolution | 1 µGal |
| <5 µGals | |
| Operating range | 8000 mGal |
| Residual long term static drift | <0.02 mGal/day |
| Range of tilt compensation | ±200 arc sec |
| Corrections | Tides, instrument tilt, temp |
| GPS accuracy | With WAAS correction < 3 m |
| Battery properties | 2 × 6.6 Ah (11.1 V) Li batteries |
| Power consumption | 6.5 Watt at 25 C |
| Operating temperature | −40 C to +55 C |
| Output | USB memory stick, RS-232C |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Beirens, B.; Darrozes, J.; Ramillien, G.; Seoane, L.; Médina, P.; Durand, P. Using a SPATIAL INS/GNSS MEMS Unit to Detect Local Gravity Variations in Static and Mobile Experiments: First Results. Sensors 2023, 23, 7060. https://doi.org/10.3390/s23167060
Beirens B, Darrozes J, Ramillien G, Seoane L, Médina P, Durand P. Using a SPATIAL INS/GNSS MEMS Unit to Detect Local Gravity Variations in Static and Mobile Experiments: First Results. Sensors. 2023; 23(16):7060. https://doi.org/10.3390/s23167060
Chicago/Turabian StyleBeirens, Benjamin, José Darrozes, Guillaume Ramillien, Lucia Seoane, Patrice Médina, and Pierre Durand. 2023. "Using a SPATIAL INS/GNSS MEMS Unit to Detect Local Gravity Variations in Static and Mobile Experiments: First Results" Sensors 23, no. 16: 7060. https://doi.org/10.3390/s23167060