
Optimization for Pipeline Corrosion Sensor Placement in Oil-Water Two-Phase Flow Using CFD Simulations and Genetic Algorithm

 ,
,  ,
, 
Abstract
:1. Introduction
2. Methodology of Hybrid Modeling for Sensor Placement Optimization
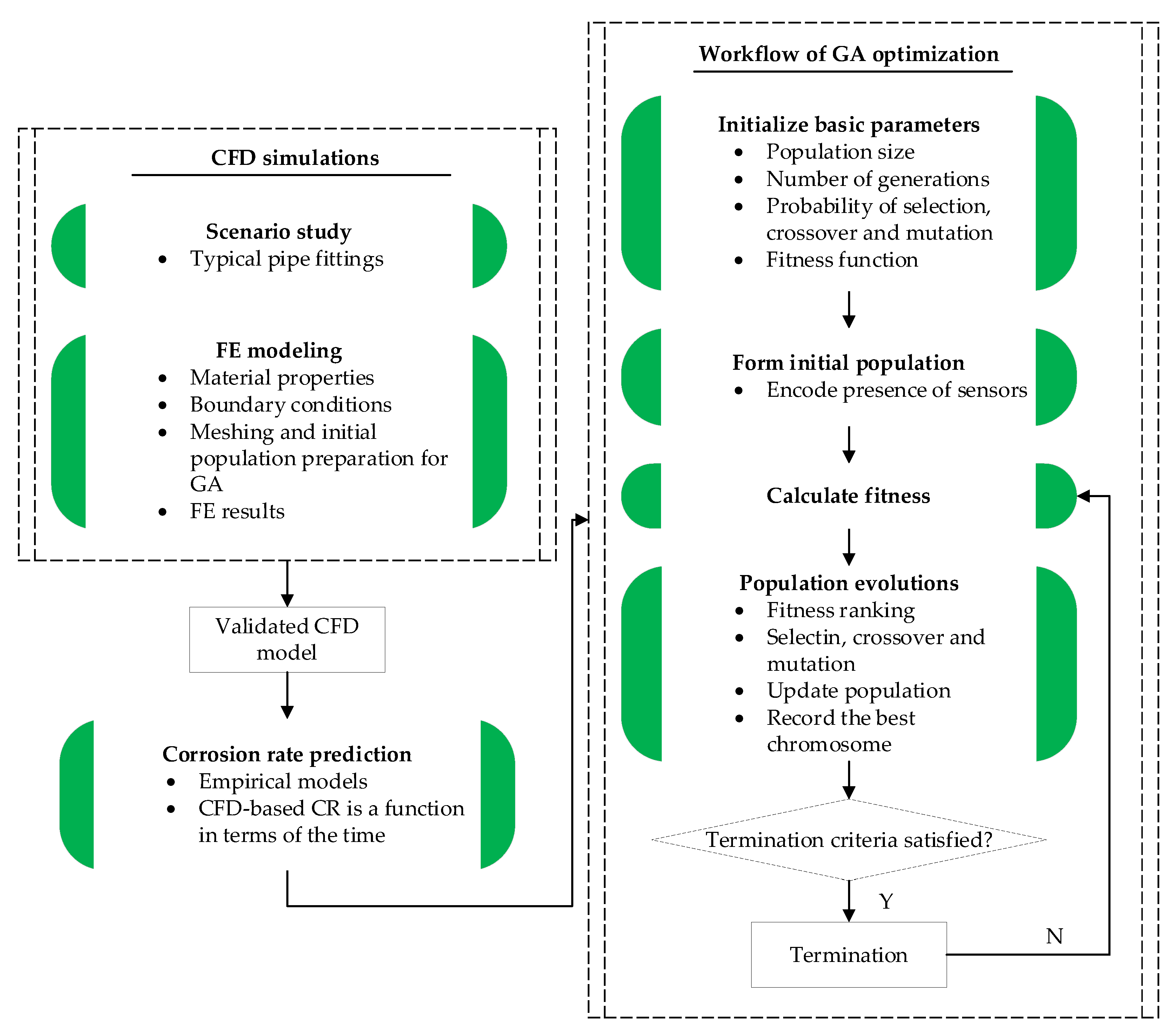
2.1. Framework of Hybrid Modeling Using CFD and GA
2.2. CFD Simulations
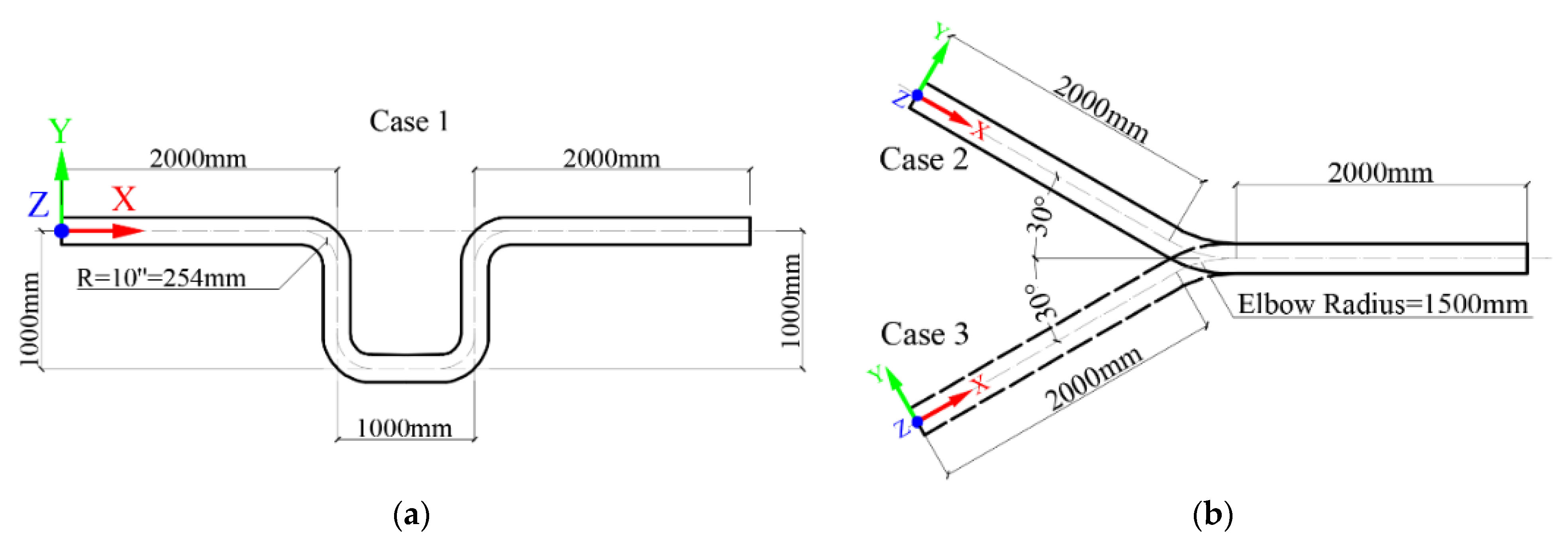
2.2.1. Scenario Study for Different Pipe Fittings
2.2.2. Governing Equations
2.2.3. Turbulence Model
2.2.4. Boundary Conditions
2.2.5. Meshing Strategy
2.3. Corrosion Rate Predictions
2.4. GA Modeling and Optimization for Sensor Placement
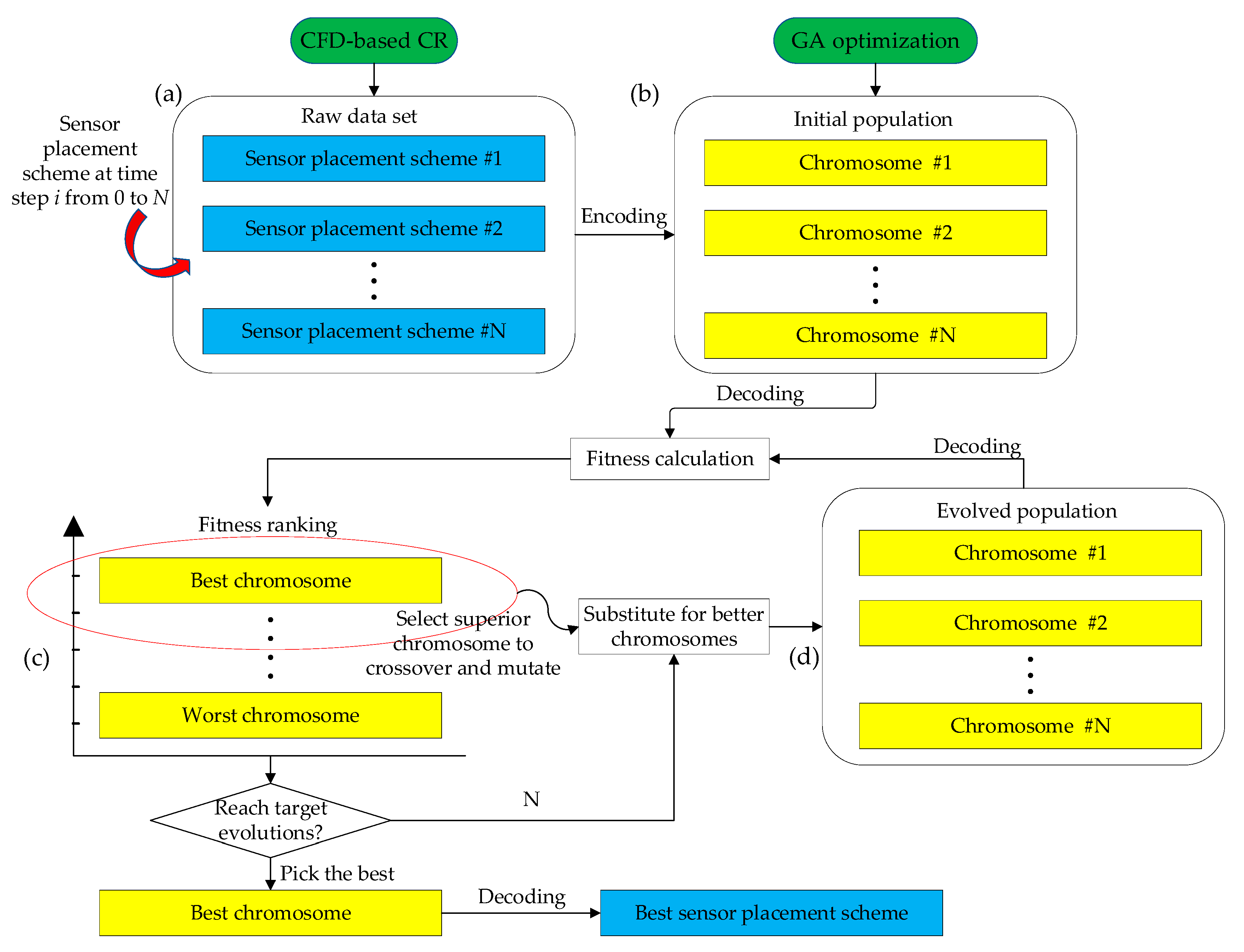
2.4.1. CFD-Based Architecture and Working Principle of GA
2.4.2. Time Complexity for Modeling Decision Making
2.4.3. Parameters Settings of GA
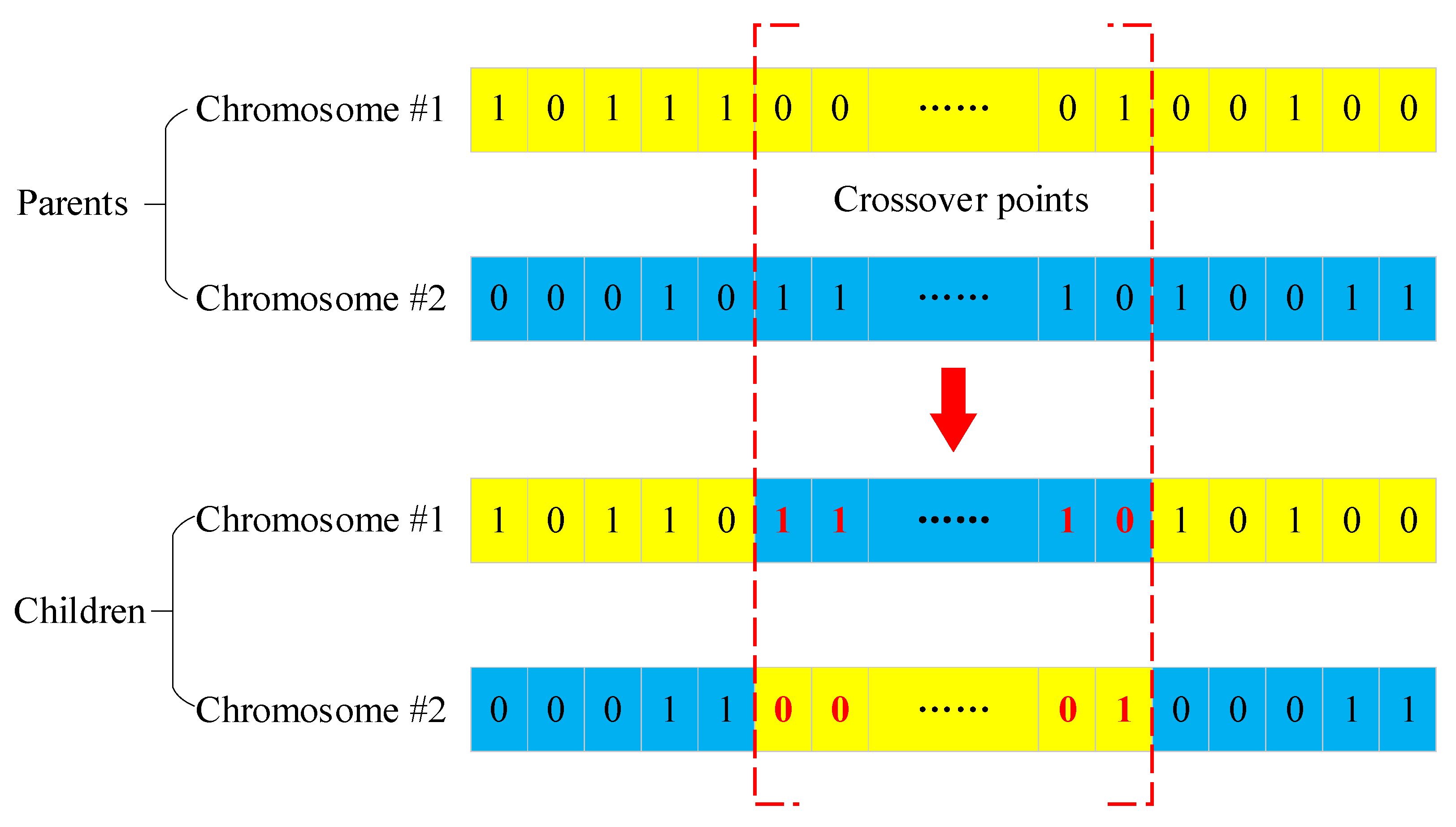
2.4.4. Crossover and Mutation
2.4.5. Fitness Function
3. Implementation of Hybrid Modeling for Sensor Placement Optimization
3.1. Critical Operating Parameters
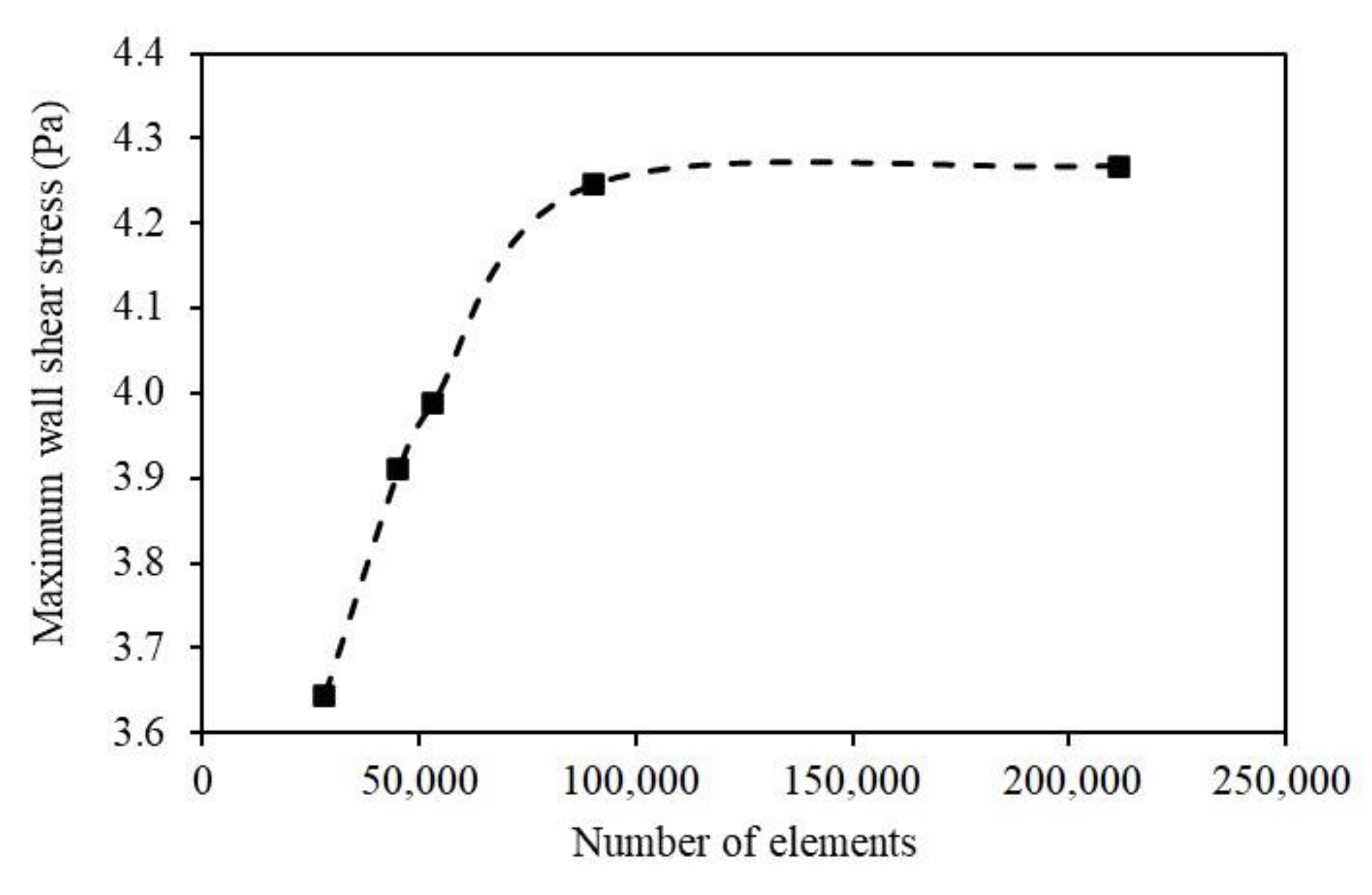
3.2. Grid Independent Study
3.3. Preliminary Estimation of Time Complexity
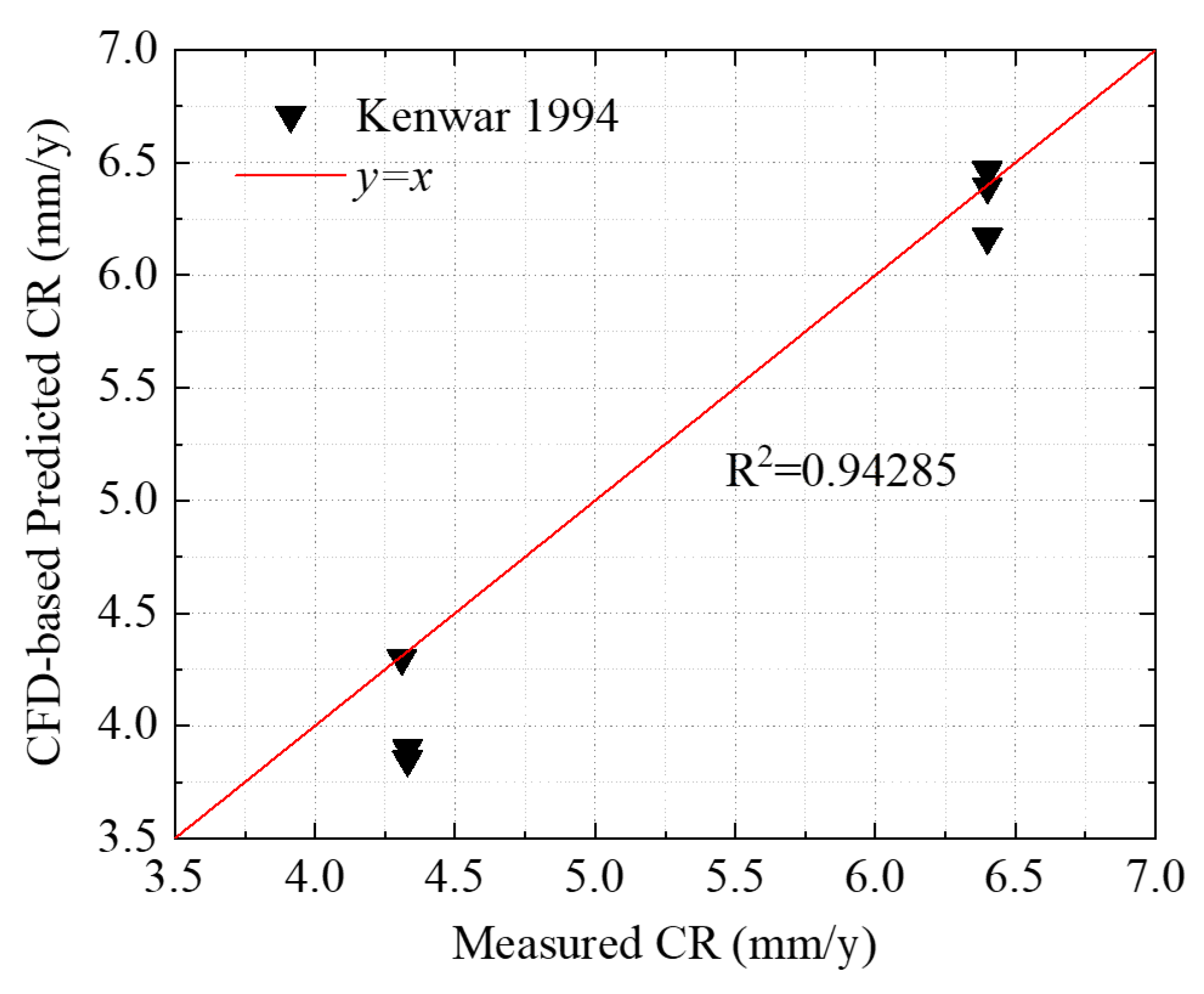
3.4. Validation for CFD-Based Corrosion Rate Prediction
4. Results and Discussion
4.1. GA Optimization for Sensor Placement
4.2. Impact of Fluid Velocity on Sensor Placement
4.3. Impact of Oil Fraction on Sensor Placement
5. Further Discussions of the Limitations of the GA Prediction and Its Applicability for Practical Use
- (1)
- The core of the hybrid modeling strategy is to utilize the parametric analysis capability of CFD program, thus providing diverse data for GA prediction. For example, the topological changes in pipe fittings result in different flow patterns under different oil contents and flow velocities, which in turn lead to shear stress changes at critical locations along the piping system. This work selected three typical pipe fittings as prototypes to demonstrate the modeling applicability when solving engineering problems. The hybrid modeling workflow can be applied to different segments of the pipeline network, which is of interest to engineers, and the final layout of the sensor placement can be optimized with following the proposed strategy;
- (2)
- On the other hand, in practical engineering, it is necessary to take the computational cost into account. The meshed elements in the CFD modeling are encoded in a single chromosome. It will lead to a large computational resource requirement when the number of elements is huge. Toward this point, researchers have addressed efforts on formatting the chromosome in pre-treatment of the algorithm to control the chromosome length [44,45]. For example, Ni et al. [46] used variable chromosome length optimization as an improved GA model to promote the adaptability of robot path finding. The chromosome format and length optimization are efficient ways to reduce the time complexity of the GA evolutions. Additionally, the probabilities of crossover and mutation are pre-determined as suggested in previous work. It was reported that the ratio of the probability of mutation over the probability of crossover had significant influence on the calculation efficiency [34] and the ultimate accuracy of optimization [47]. Further parametric study is necessary to investigate such impacts on the GA prediction;
- (3)
- The most critical index for the GA prediction refers to the fitness function. The definition of the fitness in this work involves three primary factors, the time domain (time step i) of the fluid flow passing through the pipeline, critical locations (element position identification number j) that is likely to be subject to high corrosion rates, as well as the cost of sensors (parameter b associated with j). It is worth noting that if the sensor layout scheme contains different types of sensors, the advantage of the definition of the fitness function is that the overall cost can be fully considered, and the final scheme will be very beneficial to engineering decision-making. Therefore, the GA prediction in this work can also be applied when it is necessary to compare the economic benefits and sensing efficiencies of different types of corrosion sensors.
6. Conclusions and Future Work
- The essence of the hybrid modeling is to utilize the strong fluid analysis ability of CFD to provide a rich database and the stochastic searching ability of GA to explore optimal solutions on a global level. The information binding of CFD and GA is realized by converting the grid elements and time steps into chromosome length and population size, respectively. Importantly, the fitness function involves the in-line corrosion induced by the oil-water phase flow and overall cost of sensors. Based on this, the population evolution keeps iterating until the target fitness is achieve. It is an efficient way to find out the optimal scheme of sensor placement, especially for decision-making in engineering projects;
- The GA scheme used the field of corrosion rates as the original population input. Three typical pipe fittings were investigated, including the U-shaped, upward-inclined, and downward-inclined pipes. By adopting the suggested meshing strategy discussed in Section 2.2.5, the appropriate number of elements for the three scenarios were determined to 13,192, 8841, and 8841, respectively. After the GA optimizations, the sensor layout schemes were suggested to be a total of 6, 9, and 8, respectively. The best fitness and average fitness values, surpassing 0.9, intimately align with the core objectives of sensor placement optimization. These fitness metrics directly quantify the success of the strategy in identifying optimal sensor locations. The best fitness value signifies exceptional performance, pinpointing prime positions for corrosion risk mitigation. The average fitness value reflects the overall quality of selected solutions. Their congruence with optimization objectives highlights the strategy’s efficacy in striking a vital equilibrium between measurement accuracy and economic feasibility. This achievement is pivotal, enabling industries to access precise corrosion data while minimizing costs linked to complex investigations and monitoring setups. The elevated fitness values affirm the strategy’s capability to comprehensively address corrosion risks, underscoring its practical significance in enhancing pipeline integrity management. Additionally, scenario studies of various oil fraction and fluid velocity reveal that the high fluid velocity significantly reduces the optimized sensor quantity, focusing on the critical locations with high corrosion rates.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kennedy, J.L. Oil and Gas Pipeline Fundamentals; Pennwell Books: Tulsa, OK, USA, 1984. [Google Scholar]
- Pharris, T.C.; Kolpa, R.L. Overview of the Design, Construction, and Operation of Interstate Liquid Petroleum Pipelines; Argonne National Laboratory: Chicago, IL, USA, 2008. [Google Scholar]
- Wasim, M.; Djukic, M.B. Corrosion induced failure of the ductile iron pipes at micro-and nano-levels. Eng. Fail. Anal. 2021, 121, 105169. [Google Scholar] [CrossRef]
- Wright, R.F.; Brand, E.R.; Ziomek-Moroz, M.; Tylczak, J.H.; Ohodnicki, P.R., Jr. Effect of HCO3− on electrochemical kinetics of carbon steel corrosion in CO2-saturated brines. Electrochim. Acta 2018, 290, 626–638. [Google Scholar] [CrossRef]
- Huang, Y.; Deng, F.; Xu, L.; Azarmi, F. Two-dimensional pitted corrosion localization on coated steel based on fiber Bragg grating sensors. J. Civ. Struct. Health Monit. 2020, 10, 927–945. [Google Scholar] [CrossRef]
- Xu, L.; Shi, S.; Wang, X.; Yan, F.; Huang, Y. Optical Waveguide and Laser Sensors II; SPIE: Bellingham, WA, USA; pp. 33–40.
- Xu, L.; Zhang, D.; Huang, Y.; Shi, S.; Pan, H.; Bao, Y. Monitoring Epoxy Coated Steel under Combined Mechanical Loads and Corrosion Using Fiber Bragg Grating Sensors. Sensors 2022, 22, 8034. [Google Scholar] [CrossRef]
- Xu, L.; Shi, S.; Yan, F.; Huang, Y.; Bao, Y. Experimental study on combined effect of mechanical loads and corrosion using tube-packaged long-gauge fiber Bragg grating sensors. Struct. Health Monit. 2023, 14759217231164961. [Google Scholar] [CrossRef]
- Shin, D.-H.; Hwang, H.-K.; Kim, H.-H.; Lee, J.-H. Evaluation of Commercial Corrosion Sensors for Real-Time Monitoring of Pipe Wall Thickness under Various Operational Conditions. Sensors 2022, 22, 7562. [Google Scholar] [CrossRef] [PubMed]
- Liu, W.; Lyu, Y.; Duan, Z.; Li, W.; Yu, W. Investigation of corrosion sequence in the overhead pipeline of H2S stripper column through CFD models. Eng. Fail. Anal. 2022, 136, 106187. [Google Scholar] [CrossRef]
- May, Z.; Alam, K.; Nayan, N.A. Recent Advances in Nondestructive Method and Assessment of Corrosion Undercoating in Carbon–Steel Pipelines. Sensors 2022, 22, 6654. [Google Scholar] [CrossRef]
- Vahdati, N.; Shiryayev, O.; Parapurath, S.M.; Yap, F.F.; Butt, H. Cost-Effective Corrosion Detection Sensor for Above-Ground Oil and Gas Flowlines. Sensors 2022, 22, 8489. [Google Scholar] [CrossRef]
- Kolawole, F.O.; Kolawole, S.K.; Agunsoye, J.O.; Adebisi, J.A.; Bello, S.A.; Hassan, S.B. Mitigation of corrosion problems in API 5L steel pipeline-a review. J. Mater. Environ. Sci. 2018, 9, 2397–2410. [Google Scholar]
- Hu, H.; Cheng, Y.F. Modeling by computational fluid dynamics simulation of pipeline corrosion in CO2 -containing oil-water two phase flow. J. Pet. Sci. Eng. 2016, 146, 134–141. [Google Scholar] [CrossRef]
- Trallero, J.L.; Sarica, C.; Brill, J.P. A Study of Oil/Water Flow Patterns in Horizontal Pipes. SPE Prod. Facil. 1997, 12, 165–172. [Google Scholar] [CrossRef]
- Zhang, H.; Lan, H.-Q.; Lin, N. A numerical simulation of water distribution associated with internal corrosion induced by water wetting in upward inclined oil pipes. J. Pet. Sci. Eng. 2019, 173, 351–361. [Google Scholar] [CrossRef]
- Cheng, J.C.; Kwok, H.H.; Li, A.T.; Tong, J.C.; Lau, A.K. BIM-supported sensor placement optimization based on Genetic Algorithm for multi-zone thermal comfort and IAQ monitoring. Build. Environ. 2022, 216, 108997. [Google Scholar] [CrossRef]
- Kim, C.; Oh, H.; Jung, B.C.; Moon, S.J. Optimal sensor placement to detect ruptures in pipeline systems subject to uncertainty using an Adam-mutated Genetic Algorithm. Struct. Health Monit. 2022, 21, 2354–2369. [Google Scholar] [CrossRef]
- Muhlbauer, W.K. Pipeline Risk Management Manual: Ideas, Techniques, and Resources; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Khan, R.; Ya, H.H.; Pao, W.; Khan, A. Erosion–Corrosion of 30, 60, and 90 Carbon Steel Elbows in a Multiphase Flow Containing Sand Particles. Materials 2019, 12, 3898. [Google Scholar] [CrossRef]
- Lin, P.; Lei, D.; Liao, J. Study on the influence of elbow with different curvature radii on pipeline leak location. Adv. Mech. Eng. 2021, 13, 16878140211053424. [Google Scholar] [CrossRef]
- Horgan, C.; Simmonds, J. Saint-Venant end effects in composite structures. Compos. Eng. 1994, 4, 279–286. [Google Scholar] [CrossRef]
- Lahey Jr, R.T.; Drew, D.A. The analysis of two-phase flow and heat transfer using a multidimensional, four field, two-fluid model. Nucl. Eng. Des. 2001, 204, 29–44. [Google Scholar] [CrossRef]
- Smith, A.; Cebeci, T. Numerical Solution of the Turbulent-Boundary-Layer Equations; Douglas Aircraft Co.: Long Beach, CA, USA, 1967. [Google Scholar]
- Baldwin, B.; Barth, T. A one-equation turbulence transport model for high Reynolds number wall-bounded flows. In Proceedings of the 29th Aerospace Sciences Meeting, Reno, NV, USA, 7–10 January 1991; p. 610. [Google Scholar]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; p. 439. [Google Scholar]
- Wilcox, D.C. Comparison of two-equation turbulence models for boundary layers with pressure gradient. AIAA J. 1993, 31, 1414–1421. [Google Scholar] [CrossRef]
- Bardina, J.E.; Huang, P.G.; Coakley, T.J. Turbulence Modeling Validation, Testing, and Development; NASA: Mountain View, CA, USA, 1997.
- Zeisel, H.; Durst, F. Computations of Erosion–Corrosion Processes in Separated Two-Phase Flows; NACE Corrosion: Houston, TX, USA, 1990. [Google Scholar]
- Kanwar, S. Study and Modeling of Sweet Corrosion of Multiphase Mixtures in Horizontal Pipelines. Master’s Thesis, Ohio University, Athens, OH, USA, 1994. [Google Scholar]
- Kang, C.; Gopal, M.; Jepson, W. Flow Regime Transitions in Large Diameter Inclined Multiphase Pipelines. In Proceedings of the NACE Northern Area Eastern Conference and Exhibition, Denver, CO, USA, 7–11 April 2002. Paper 1. [Google Scholar]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on Genetic Algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Yan, F.; Lin, Z. New strategy for anchorage reliability assessment of GFRP bars to concrete using hybrid artificial neural network with Genetic Algorithm. Compos. Part B Eng. 2016, 92, 420–433. [Google Scholar] [CrossRef]
- Hassanat, A.; Almohammadi, K.; Alkafaween, E.; Abunawas, E.; Hammouri, A.; Prasath, V.B.S. Choosing Mutation and Crossover Ratios for Genetic Algorithms—A Review with a New Dynamic Approach. Information 2019, 10, 390. [Google Scholar] [CrossRef]
- Yan, F.; Lin, Z.; Wang, X.; Azarmi, F.; Sobolev, K. Evaluation and prediction of bond strength of GFRP-bar reinforced concrete using artificial neural network optimized with Genetic Algorithm. Compos. Struct. 2017, 161, 441–452. [Google Scholar] [CrossRef]
- Kora, P.; Yadlapalli, P. Crossover Operators in Genetic Algorithms: A Review. Int. J. Comput. Appl. 2017, 162, 34–36. [Google Scholar] [CrossRef]
- Desamala, A.B.; Dasamahapatra, A.K.; Mandal, T.K. Oil-water two-phase flow characteristics in horizontal pipeline–a comprehensive CFD study. Int. J. Chem. Mol. Nucl. Mater. Metall. Eng. World Acad. Sci. Eng. Technol. 2014, 8, 360–364. [Google Scholar]
- Xu, X.-X. Study on oil–water two-phase flow in horizontal pipelines. J. Pet. Sci. Eng. 2007, 59, 43–58. [Google Scholar] [CrossRef]
- Liu, D.; Liu, L.; Bai, D.; Diao, Y. Experimental study of loss coefficients for laminar oil-water two-phase flow through micro-scale flow restrictions. Exp. Therm. Fluid Sci. 2023, 140, 110747. [Google Scholar] [CrossRef]
- Mokhatab, S.; Poe, W.A.; Mak, J.Y. Handbook of Natural Gas Transmission and Processing: Principles and Practices; Gulf Professional Publishing: Houston, TX, USA, 2018. [Google Scholar]
- Schmura, E.; Klingenberg, M.; Paster, M.; Gruber, J. Existing Natural Gas Pipeline Materials and Associated Operational Characteristics; DOE Hydrogen Program: Washington, DC, USA, 2005. [Google Scholar]
- Hancock, M.J.; Bush, J. Fluid pipes. J. Fluid Mech. 2002, 466, 285–304. [Google Scholar] [CrossRef]
- Alias AZ, M.; Koto, J.; Ahmed, Y.M. CFD simulation for stratified oil-water two-phase flow in a horizontal pipe. J. Subsea Offshore 2015, 2, 20–25. [Google Scholar]
- Kim, I.Y.; De Weck, O.L. Variable chromosome length Genetic Algorithm for progressive refinement in topology optimization. Struct. Multidiscip. Optim. 2005, 29, 445–456. [Google Scholar] [CrossRef]
- Han, L.; Kendall, G.; Cowling, P. Recent Advances in Simulated Evolution and Learning; World Scientific: Singapore, 2004; pp. 506–525. [Google Scholar]
- Ni, J.; Wang, K.; Huang, H.; Wu, L.; Luo, C. Robot path planning based on an improved Genetic Algorithm with variable length chromosome. In Proceedings of the 2016 12th International Conference on Natural Computation, Fuzzy Systems and Knowledge Discovery (ICNC-FSKD), Changsha, China, 13–15 August 2016; pp. 145–149. [Google Scholar]
- Alkafaween, E. Novel Methods for Enhancing the Performance of Genetic Algorithms. Master’s Thesis, Mu’tah University, Karak City, Jordan, 2018. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Conoco LVT200 Oil | CO2 Dissolved Water |
|---|---|---|
| Density (kg/m3) | 914 | 1000 |
| Viscosity (Pa·S) | 0.002 | 0.001 |
| Interfacial tension (N/m) | 0.032 | 0.072 |
| Vapor pressure (kPa) | 64.3 | 7.3 |
| API weight | 23 | \ |
| No. | Global Element Size (m) | Elbow Element Size (m) | Number of Elements | Maximum Wall Shear Stress (Pa) |
|---|---|---|---|---|
| 1 | 0.015 | 0.010 | 211,580 | 4.2670 |
| 2 | 0.020 | 0.015 | 90,288 | 4.2455 |
| 3 | 0.023 | 0.018 | 53,108 | 3.9888 |
| 4 | 0.025 | 0.020 | 45,220 | 3.9099 |
| 5 | 0.030 | 0.025 | 28,116 | 3.6448 |
| Item | Symbol | Case 1 | Case 2 and Case 3 |
|---|---|---|---|
| Number of generations | G | 1000 | 1000 |
| Population size | S | 1000 | 1000 |
| Probability of crossover | pc | 0.7 | 0.7 |
| Probability of mutation | pm | 0.1 | 0.1 |
| Length of chromosome | n | 13,192 | 8841 |
| Time complexity (×106) | T | 22.8 | 1.53 |
| Flow Velocity (m/s) | Oil Content (%) | Measured Corrosion Rate (mm/yr) |
|---|---|---|
| 0.28 | 0 | 3.00 |
| 0.28 | 20 | 4.00 |
| 0.28 | 60 | 4.30 |
| 0.28 | 80 | 1.00 |
| 1 | 0 | 4.25 |
| 1 | 20 | 5.40 |
| 1 | 60 | 5.75 |
| Point No. | Case 1 | Case 2 | Case 3 | |||
|---|---|---|---|---|---|---|
| (x, y, z) | CR (mm/yr) | (x, y, z) | CR (mm/yr) | (x, y, z) | CR (mm/yr) | |
| 1 | (3.1468, −0.1396, −0.0093) | 6.5805 | (0.1432, −0.0091, 0.0972) | 6.1531 | (0.1262, −0.0435, 0.0874) | 6.1694 |
| 2 | (3.1396, −0.1468, −0.0093) | 6.5799 | (0.1262, −0.0091, 0.0972) | 6.1528 | (0.1093, −0.0435, 0.0874) | 6.1689 |
| 3 | (3.1545, −0.1328, −0.0093) | 6.5794 | (0.1431, −0.0267, 0.0939) | 6.1524 | (0.1430, −0.0435, 0.0874) | 6.1686 |
| 4 | (3.1328, −0.1545, −0.0093) | 6.5780 | (0.1598, −0.009, 0.0972) | 6.1523 | (0.0925, −0.0435, 0.0874) | 6.1669 |
| 5 | (3.1627, −0.1266, −0.0093) | 6.5759 | (0.1262, −0.0267, 0.0939) | 6.1521 | (0.1598, −0.0435, 0.0874) | 6.1668 |
| 6 | (3.1266, −0.1627, −0.0093) | 6.5755 | (0.1598, −0.0267, 0.0939) | 6.1516 | (0.1262, −0.0588, 0.0779) | 6.1657 |
| 7 | (3.1209, −0.1712, −0.0093) | 6.5722 | (0.1093, −0.0091, 0.0972) | 6.1513 | (0.1262, −0.0267, 0.0939) | 6.1656 |
| 8 | (3.1712, −0.1209, −0.0093) | 6.5691 | (0.1766, −0.0091, 0.0972) | 6.1507 | (0.1430, −0.0588, 0.0779) | 6.1652 |
| 9 | (3.1157, −0.1801, −0.0093) | 6.5684 | (0.1093, −0.0267, 0.0939) | 6.1506 | (0.1430, −0.0267, 0.0939) | 6.1651 |
| 10 | (3.1464, −0.1387, 0.0181) | 6.5664 | (0.1766, −0.0267, 0.0939) | 6.1501 | (0.1093, −0.0588, 0.0779) | 6.1650 |
| Case 1: 6 Locations | Case 2: 9 Locations | Case 3: 8 Locations | ||||
|---|---|---|---|---|---|---|
| Sensor No. | (x, y, z) | CR (mm/y) | (x, y, z) | CR (mm/y) | (x, y, z) | CR (mm/y) |
| 1 | (2.1324, −0.8458, −0.0115) | 6.565 | (0.1093, 0.0939, −0.0267) | 6.1506 | (2.5771, −0.2248, −0.0267) | 6.1577 |
| 2 | (3.1445, −0.1371, −0.0272) | 6.5445 | (0.1430, 0.0972,0.0090) | 6.15 | (0.1262, 0.0972, −0.0090) | 6.1567 |
| 3 | (2.18, −0.8845, −0.0104) | 6.5412 | (0.1431, 0.0874,0.0435) | 6.1384 | (2.5739, −0.2304, −0.0435) | 6.1556 |
| 4 | (3.1473, −0.14, 0.0045) | 6.5410 | (2.6807, 0.2808, −0.009) | 6.1283 | (0.1093, 0.0972, −0.0090) | 6.1554 |
| 5 | (2.1613, −0.8754, 0.0233) | 6.5387 | (2.6516, 0.264, −0.009) | 6.1282 | (2.5496, −0.2051, −0.009) | 6.1547 |
| 6 | (3.1333, −0.155, 0.0045) | 6.5378 | (2.637, 0.2556, −0.009) | 6.1281 | (0.1262, 0.0514, −0.0830) | 6.1537 |
| 7 | (2.6953, 0.2892,0.009) | 6.1280 | (2.5156, −0.1968, −0.0435) | 6.1528 | ||
| 8 | (2.7390, 0.3145, −0.009) | 6.1277 | (2.6079, −0.2388, 0.0090) | 6.1507 | ||
| 9 | (2.6225, 0.2472, −0.009) | 6.1276 | ||||
| Maximum Allowable Corrosion Rate (mm/yr) | CFD-GA Method | CFD without GA Optimized |
|---|---|---|
| 2.00 | 550 | 3,250 |
| 3.00 | 550 | 3,000 |
| 4.00 | 500 | 2,100 |
| 5.00 | 350 | 850 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, S.; Jiang, B.; Ludwig, S.; Xu, L.; Wang, H.; Huang, Y.; Yan, F. Optimization for Pipeline Corrosion Sensor Placement in Oil-Water Two-Phase Flow Using CFD Simulations and Genetic Algorithm. Sensors 2023, 23, 7379. https://doi.org/10.3390/s23177379
Shi S, Jiang B, Ludwig S, Xu L, Wang H, Huang Y, Yan F. Optimization for Pipeline Corrosion Sensor Placement in Oil-Water Two-Phase Flow Using CFD Simulations and Genetic Algorithm. Sensors. 2023; 23(17):7379. https://doi.org/10.3390/s23177379
Chicago/Turabian StyleShi, Shuomang, Baiyu Jiang, Simone Ludwig, Luyang Xu, Hao Wang, Ying Huang, and Fei Yan. 2023. "Optimization for Pipeline Corrosion Sensor Placement in Oil-Water Two-Phase Flow Using CFD Simulations and Genetic Algorithm" Sensors 23, no. 17: 7379. https://doi.org/10.3390/s23177379
APA StyleShi, S., Jiang, B., Ludwig, S., Xu, L., Wang, H., Huang, Y., & Yan, F. (2023). Optimization for Pipeline Corrosion Sensor Placement in Oil-Water Two-Phase Flow Using CFD Simulations and Genetic Algorithm. Sensors, 23(17), 7379. https://doi.org/10.3390/s23177379