
Evaluating the Performance of Video-Based Automated Passenger Counting Systems in Real-World Conditions: A Comparative Study


Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Company | Technology | Device | Accuracy—Precision | Source |
|---|---|---|---|---|
| EUROTECH (Manufacturer) | Stereoscopic vision with IR sensors | DynaPCN 10-01 DynaPCN 10-20-00 DynaPCN 10-20-01 | 98–99% | [19] |
| HELLA AGLAIA (Manufacturer) | Stereoscopic vision with IR sensors | APS-R APS-B | 98–99% | [10] |
| IRIS Intelligent Sensing (Manufacturer) | 3D IR matrix sensor (ToF) | IRMA Matrix | 99%–N/A | [20] |
| DILAX INTELCOM (Manufacturer) | Triangulation method Stereoscopic vision | DILAX IRS-320R DILAX IRS-400 | 99%–N/A | [21] |
| SELSAT (Selecta Digital Service) (System Integrator) | Stereoscopic vision with IR sensors | DynaPCN 10-01 | 98–99% | [22] |
| AESYS (System Integrator) | Stereoscopic vision | Aesys VideoSIGHT | 98%–N/A | [23] |
| Retail Sensing (System Integrator) | Optical solution | - | 99%–N/A | [24] |
2. Methodology
2.1. Assessment of the Accuracy of the Commercial APC System in Asti
2.1.1. Data Processing
- Data from manual counting, in the form of a sheet for each door, were digitized and standardized to a single timestamp format;
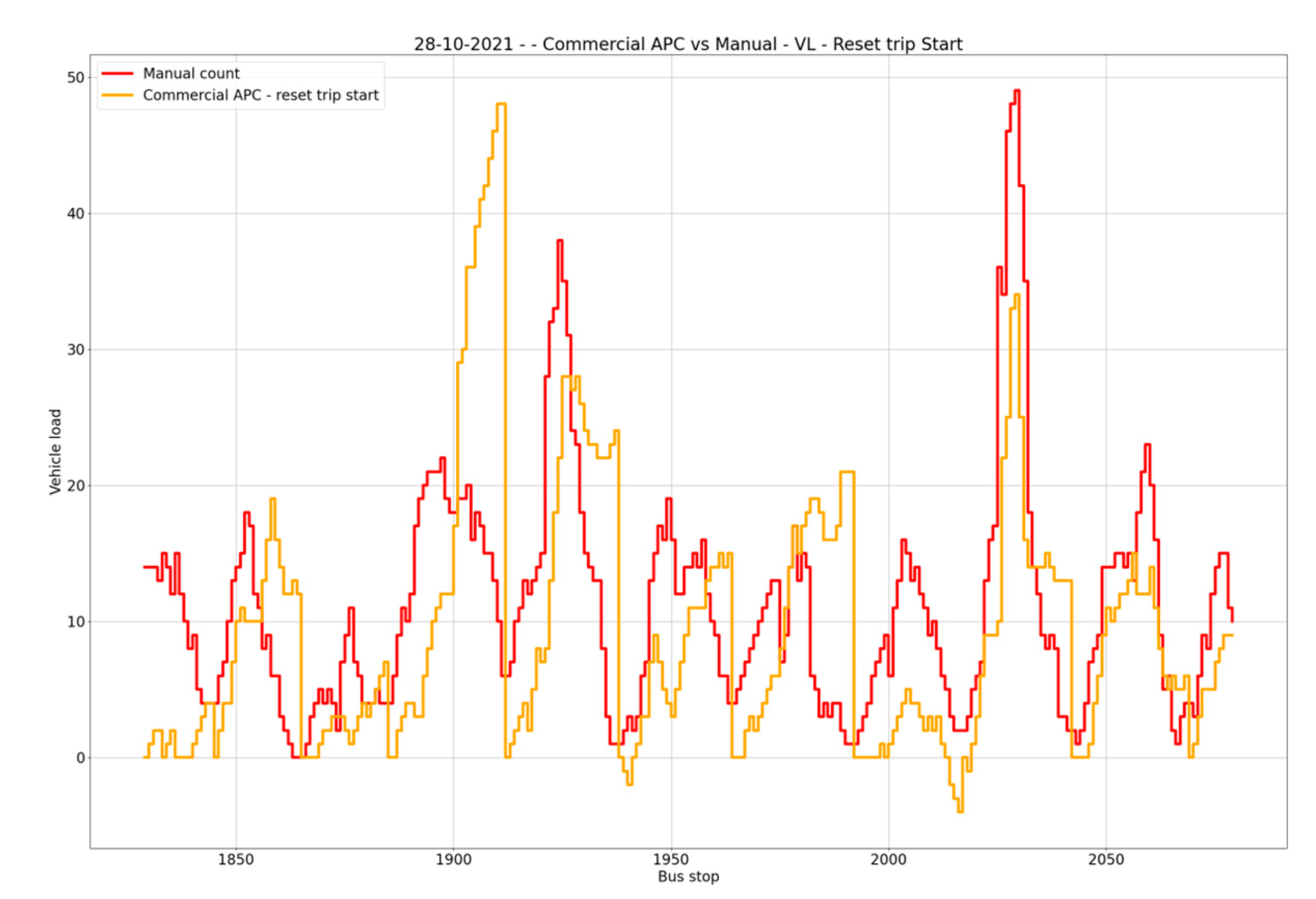
- Data from the commercial APC only provided information on passengers boarding and alighting at each stop. Any lack of accuracy in this counting causes errors in the calculation of the occupancy between stops. These errors are cumulative, and the overall vehicle occupancy error will increase as a bus continues its journey. To handle this issue, some transport companies have opted to reset the vehicle occupancy at the end of each journey. We calculated vehicle occupancy using two different reset strategies: (i) vehicle occupancy was set to 0 at the beginning of each day; (ii) vehicle occupancy was set to 0 at the start of each journey, taking no account of passengers boarding or alighting at the terminus, because passengers often enter and leave a bus multiple times while it is at the terminus.
2.1.2. Data Analysis and Validation
2.2. Low-Cost APC System Design and Test
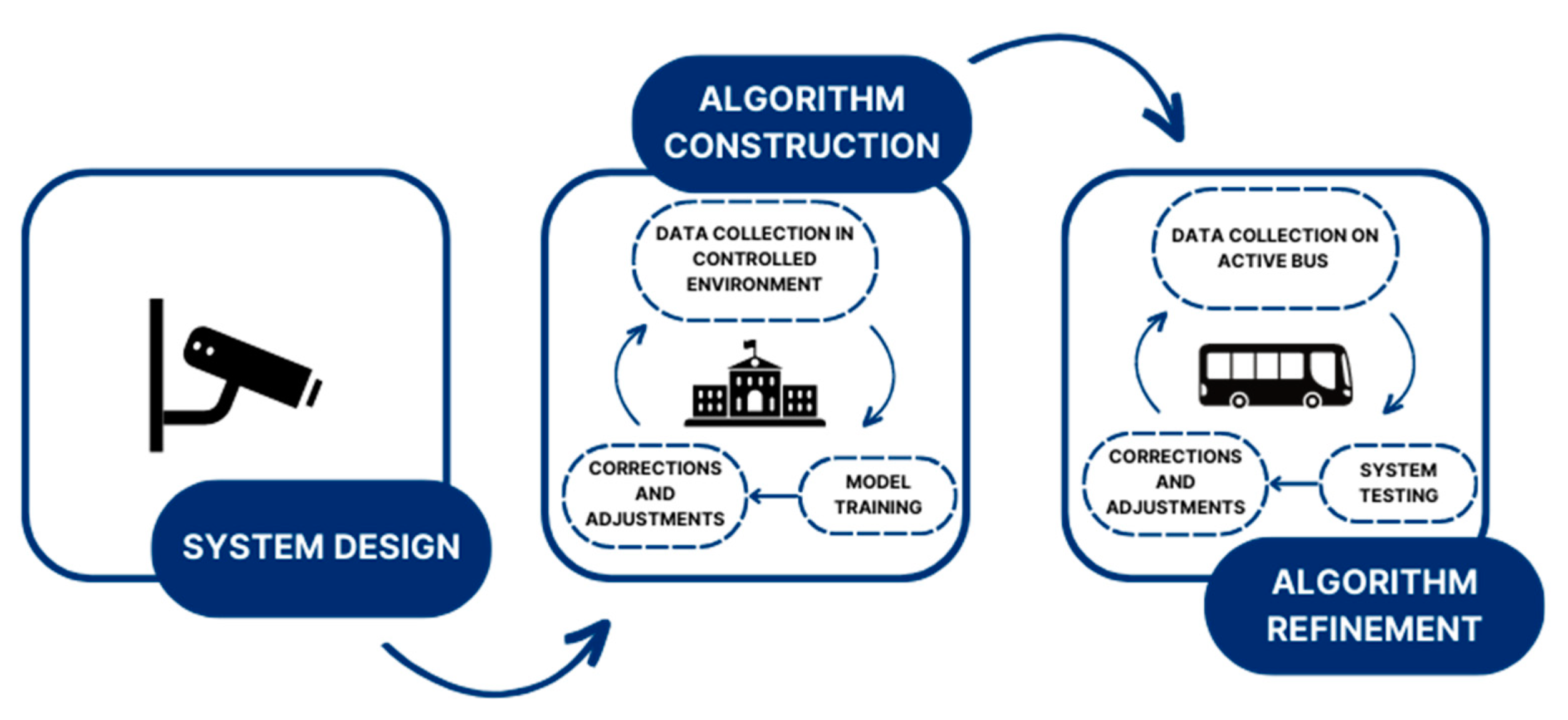
2.2.1. Design of the Low-Cost APC System
- System design
- Algorithm construction and refinement
- The simulation of different lighting conditions;
- The simulation of different levels of crowdedness;
- The simulation of people’s different boarding and alighting patterns;
- The simulation of people wearing and carrying accessories.
2.2.2. Sampling Plan and Experimental Set up
2.2.3. Data Processing, Analysis and Validation
- For the manual count and the commercial APC, the processing was very similar to the one described in Section 2.1.1. Vehicle occupancy had already been estimated from the data provided by GTT, and some cleaning and imputation were done, since there were empty fields relating to vehicle occupancy, and some stop-related information needed to be filled in.
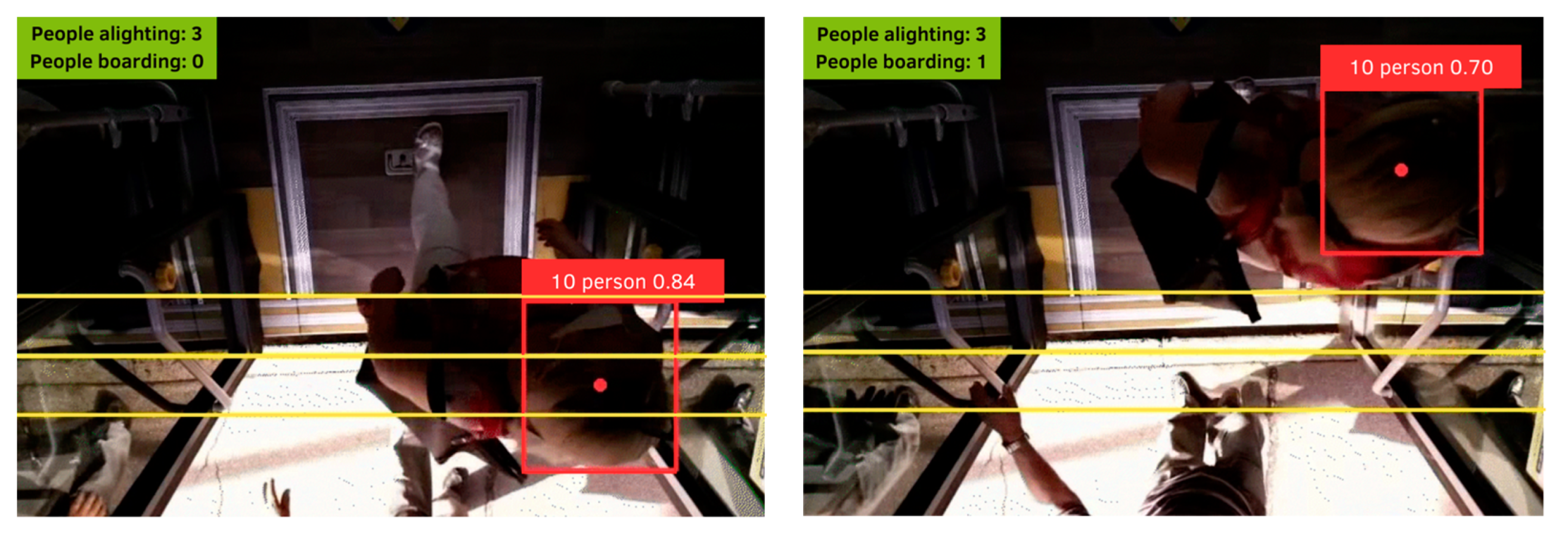
- The low-cost system required the use of the algorithm to estimate the different values. The frames of the videos at each stop were used to initially estimate the number of passengers boarding and alighting. The vehicle occupancy was then calculated for the testing days. Figure 5 shows the output of the algorithm; the person is identified and assigned to a centroid that is tracked over the video. The ROI lines indicated the direction of the passenger, that is to say, whether they were boarding or alighting.
3. Results
3.1. Assessment of Accuracy of Commercial APC
3.2. Results of the Test on Two APC Systems
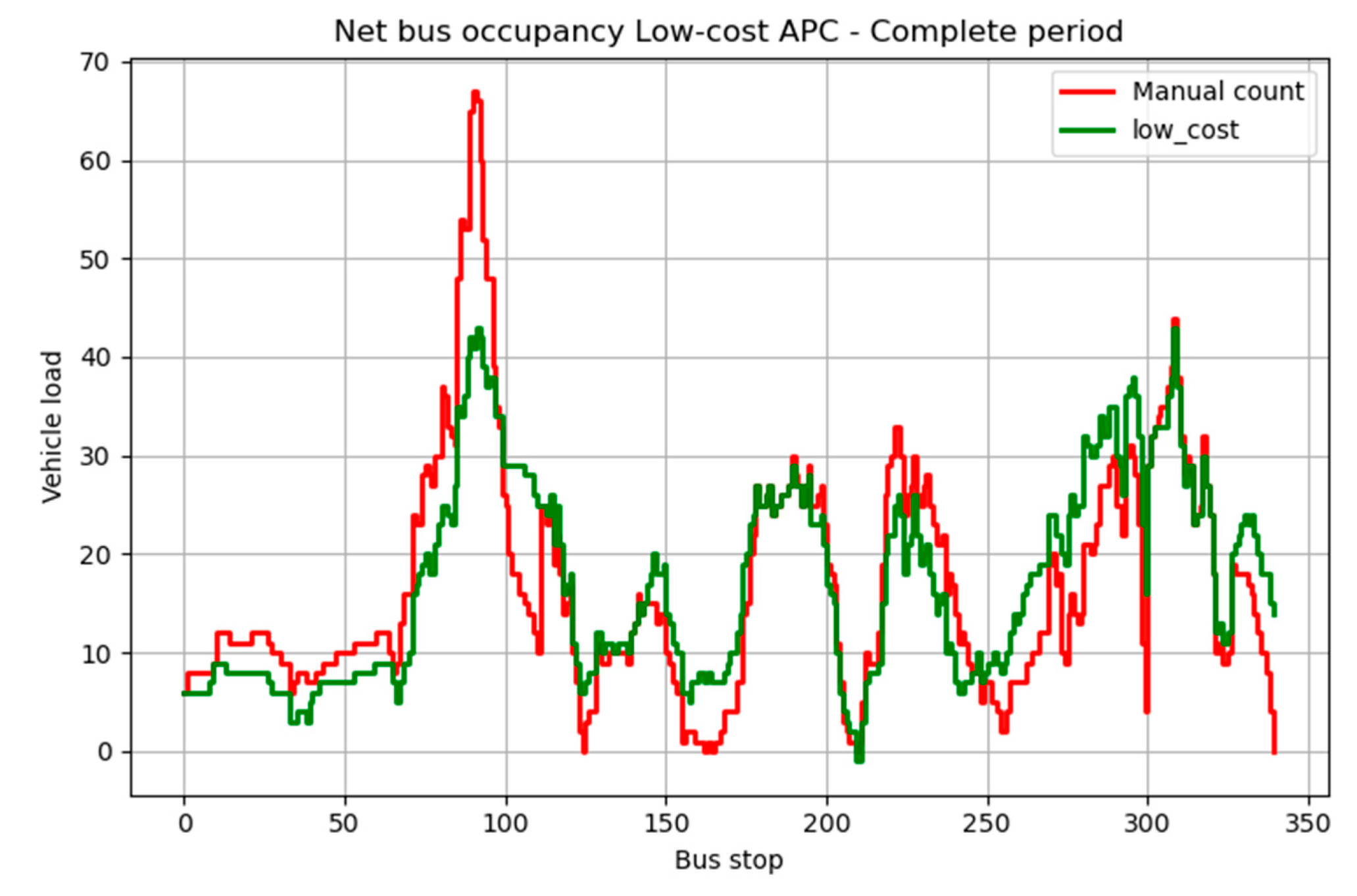
3.2.1. Low-Cost APC
3.2.2. Commercial APC
3.2.3. Comparison between the Systems
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Iliopoulou, C.; Kepaptsoglou, K. Combining ITS and Optimization in Public Transportation Planning: State of the Art and Future Research Paths. Eur. Transp. Res. Rev. 2019, 11, 27. [Google Scholar] [CrossRef]
- Mangiaracina, R.; Perego, A.; Salvadori, G.; Tumino, A. A Comprehensive View of Intelligent Transport Systems for Urban Smart Mobility. Int. J. Logist. Res. Appl. 2017, 20, 39–52. [Google Scholar] [CrossRef]
- Dimitrakopoulos, G.; Uden, L.; Varlamis, I. Intelligent Transport Systems and Smart Mobility. In The Future of Intelligent Transport Systems; Dimitrakopoulos, G., Uden, L., Varlamis, I., Eds.; Elsevier: Amsterdam, The Netherlands, 2020; pp. 199–205. ISBN 978-0-12-818281-9. [Google Scholar]
- Paneru, S.; Jeelani, I. Computer Vision Applications in Construction: Current State, Opportunities & Challenges. Autom. Constr. 2021, 132, 103940. [Google Scholar] [CrossRef]
- Dhou, S.; Alnabulsi, A.; Al-Ali, A.R.; Arshi, M.; Darwish, F.; Almaazmi, S.; Alameeri, R. An IoT Machine Learning-Based Mobile Sensors Unit for Visually Impaired People. Sensors 2022, 22, 5202. [Google Scholar] [CrossRef]
- Munteanu, D.; Moina, D.; Zamfir, C.G.; Petrea, Ș.M.; Cristea, D.S.; Munteanu, N. Sea Mine Detection Framework Using YOLO, SSD and EfficientDet Deep Learning Models. Sensors 2022, 22, 9536. [Google Scholar] [CrossRef]
- Oroceo, P.P.; Kim, J.-I.; Caliwag, E.M.F.; Kim, S.-H.; Lim, W. Optimizing Face Recognition Inference with a Collaborative Edge–Cloud Network. Sensors 2022, 22, 8371. [Google Scholar] [CrossRef]
- Olivo, A.; Maternini, G.; Barabino, B. Empirical Study on the Accuracy and Precision of Automatic Passenger Counting in European Bus Services. Open Transp. J. 2020, 13, 250–260. [Google Scholar] [CrossRef]
- Kuchár, P.; Pirník, R.; Janota, A.; Malobický, B.; Kubík, J.; Šišmišová, D. Passenger Occupancy Estimation in Vehicles: A Review of Current Methods and Research Challenges. Sustainability 2023, 15, 1332. [Google Scholar] [CrossRef]
- HELLA Aglaia Advanced People Sensor APS-B. Available online: https://people-sensing.com/public-transport/#products (accessed on 1 July 2022).
- IRIS Intelligent Sensing Rhein-Neckar-Verkehr-GmbH (Rnv). Available online: https://www.iris-sensing.com/references/details/rhein-neckar-verkehr-gmbh-rnv/ (accessed on 13 April 2021).
- VDV Industrieforum. Automatic Passenger Counting Systems (APCS): Recommendations for the Application of APCSs within Public Transport and Regional Rail Transport; Version 2.1; VDV Recommendation 457; VDV Industrieforum: Cologne, Germany, 2018. [Google Scholar]
- Hensher, D.A. Chapter 23—A Review of Objective and Subjective Measures of Crowding in Public Transport. In Bus Transport; Elsevier: Amsterdam, The Netherlands, 2020; pp. 281–294. ISBN 978-0-12-820132-9. [Google Scholar]
- Wang, S.; Zhang, L.; Lin, L.; Zhang, L. Wi-Fi Sniffing Data Based Passenger-Flow Detection Method Applied in Urban Rail Transit. In Proceedings of the 2021 IEEE 6th International Conference on Computer and Communication Systems (ICCCS 2021), Chengdu, China, 23–26 April 2021; pp. 17–21. [Google Scholar] [CrossRef]
- Nasir, A.S.A.; Gharib, N.K.A.; Jaafar, H. Automatic Passenger Counting System Using Image Processing Based on Skin Colour Detection Approach. In Proceedings of the 2018 International Conference on Computational Approach in Smart Systems Design and Applications (ICASSDA 2018), Serawak, Malaysia, 15–17 August 2018. [Google Scholar] [CrossRef]
- Liciotti, D.; Cenci, A.; Frontoni, E.; Mancini, A.; Zingaretti, P. An Intelligent RGB-D Video System for Bus Passenger Counting. In Intelligent Autonomous Systems 14; Chen, W., Hosoda, K., Menegatti, E., Shimizu, M., Wang, H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 473–484. [Google Scholar]
- Che Husin, M.S.; Abdul Nasir, A.S. Automatic Passengers Counting System Using Images Processing Based on YCbCr and HSV Colour Spaces Analysis. In Proceedings of the 11th National Technical Seminar on Unmanned System Technology 2019; Md Zain, Z., Ahmad, H., Pebrianti, D., Mustafa, M., Abdullah, N.R.H., Samad, R., Mat Noh, M., Eds.; Springer Nature: Singapore, 2021; pp. 853–872. [Google Scholar]
- Kuchár, P.; Pirník, R.; Tichý, T.; Rástočný, K.; Skuba, M.; Tettamanti, T. Noninvasive Passenger Detection Comparison Using Thermal Imager and IP Cameras. Sustainability 2021, 13, 12928. [Google Scholar] [CrossRef]
- EUROTECH DynaPCN 10–20. Available online: https://www.eurotech.com/en/products/intelligent-sensors/people-counters/dynapcn-10-20 (accessed on 1 July 2022).
- IRIS Intelligent Sensing IRMA MATRIX. Available online: https://www.iris-sensing.com/us/products/irma-matrix/ (accessed on 1 July 2022).
- DILAX Automatic Passenger Counting (APC): Sensors & Systems. Available online: https://www.dilax.com/en/products/automatic-passenger-counting (accessed on 13 April 2021).
- SELSAT Detaglio Prodotti. Available online: https://selectadigital-service.it/servizi-e-prodotti/ (accessed on 13 April 2021).
- AESYS Aesys|Video Surveillance System, CCTV and Passenger Counting. Available online: https://www.aesys.com/products-solutions/bus/on-board-systems/video-surveillance-system-cctv-and-passenger-counting.html (accessed on 14 February 2023).
- RetailSense Personalized Product Recommendation System|RetailSense. Available online: https://www.retailsens-ing.com/automated-passenger-counting.html (accessed on 13 April 2021).
- Liu, G.; Yin, Z.; Jia, Y.; Xie, Y. Passenger Flow Estimation Based on Convolutional Neural Network in Public Transportation System. Knowl.-Based Syst. 2017, 123, 102–115. [Google Scholar] [CrossRef]
- Kumar Singh, A.; Singh, D.; Goyal, M. People Counting System Using Python. In Proceedings of the 5th International Conference on Computing Methodologies and Communication (ICCMC 2021), Erode, India, 8–10 April 2021; pp. 1750–1754. [Google Scholar] [CrossRef]
- Hsu, Y.-W.; Chen, Y.-W.; Perng, J.-W. Estimation of the Number of Passengers in a Bus Using Deep Learning. Sensors 2020, 20, 2178. [Google Scholar] [CrossRef] [PubMed]
- Seidel, R.; Jahn, N.; Seo, S.; Goerttler, T.; Obermayer, K. NAPC: A Neural Algorithm for Automated Passenger Counting in Public Transport on a Privacy-Friendly Dataset. IEEE Open J. Intell. Transp. Syst. 2021, 3, 33–44. [Google Scholar] [CrossRef]
- Valencia, I.J.C.; Guillermo, M.A.; Dadios, E.P.; Fillone, A.M.; Sybingco, E.; Billones, R.K.C. Overhead View Bus Passenger Detection and Counter Using DeepSORT and Tiny-Yolo V4. In Proceedings of the 2022 IEEE 14th International Conference on Humanoid, Nanotechnology, Information Technology, Communication and Control, Environment, and Management (HNICEM), Boracay Island, Philippines, 1–4 December 2022; pp. 1–6. [Google Scholar]
- Zhang, Y.; Tu, W.; Chen, K.; Wu, C.H.; Li, L.; Ip, W.H.; Chan, C.Y. Bus Passenger Flow Statistics Algorithm Based on Deep Learning. Multimed. Tools Appl. 2020, 79, 28785–28806. [Google Scholar] [CrossRef]
- Liu, L.; He, J.; Hou, Y.; Zhang, C. A Technology for Automatically Counting Bus Passenger Based on YOLOv2 and MIL Algorithm. In Proceedings of the 2020 IEEE 5th International Conference on Image, Vision and Computing (ICIVC), Beijing, China, 10–12 July 2020; pp. 166–170. [Google Scholar] [CrossRef]
- Zhang, S.; Wu, Y.; Men, C.; Li, X. Tiny YOLO Optimization Oriented Bus Passenger Object Detection. Chin. J. Electron. 2020, 29, 132–138. [Google Scholar] [CrossRef]
- Liang, Y.; Qian, X.; Zhu, L. Towards Better Railway Service: Passengers Counting in Railway Compartment. IEEE Trans. Circuits Syst. Video Technol. 2021, 31, 439–451. [Google Scholar] [CrossRef]
- Moreno Rendon, W.D.; Burgos Anillo, C.; Jaramillo-Ramirez, D.; Carrillo, H. Passenger Counting in Mass Public Transport Systems Using Computer Vision and Deep Learning. IEEE Lat. Am. Trans. 2023, 21, 537–545. [Google Scholar] [CrossRef]
- Nakashima, H.; Arai, I.; Fujikawa, K. Passenger Counter Based on Random Forest Regressor Using Drive Recorder and Sensors in Buses. In Proceedings of the 2019 IEEE International Conference on Pervasive Computing and Communications Workshops (PerCom Workshops), Kyoto, Japan, 11–15 March 2019; pp. 561–566. [Google Scholar]
- Hsu, Y.W.; Wang, T.Y.; Perng, J.W. Passenger Flow Counting in Buses Based on Deep Learning Using Surveillance Video. Optik 2020, 202, 163675. [Google Scholar] [CrossRef]
- Grönman, J.; Sillberg, P.; Rantanen, P.; Saari, M. People Counting in a Public Event—Use Case: Free-to-Ride Bus. In Proceedings of the 2019 42nd International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO 2019), Opatija, Croatia, 20–24 May 2019; pp. 1055–1059. [Google Scholar] [CrossRef]
- Jenelius, E. Data-Driven Metro Train Crowding Prediction Based on Real-Time Load Data. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2254–2265. [Google Scholar] [CrossRef]
- Jenelius, E. Personalized Predictive Public Transport Crowding Information with Automated Data Sources. Transp. Res. Part C Emerg. Technol. 2020, 117, 102647. [Google Scholar] [CrossRef]
- Amato, F.; Di Martino, S.; Mazzocca, N.; Nardone, D.; di Torrepadula, F.R.; Sannino, P. Bus Passenger Load Prediction: Challenges from an Industrial Experience. In Web and Wireless Geographical Information Systems; Karimipour, F., Storandt, S., Eds.; Springer International Publishing: Cham, Switzerland, 2022; pp. 93–107. [Google Scholar]
- Hangli, G.; Lin, L.; Jiang, R.; Michikata, T.; Koshizuka, N. Multi-Weighted Graphs Learning for Passenger Count Prediction on Railway Network. In Proceedings of the 2022 IEEE 46th Annual Computers, Software, and Applications Conference (COMPSAC), Los Alamitos, CA, USA, 27 June–1 July 2022; pp. 374–382. [Google Scholar]
- Hoppe, J.; Schwinger, F.; Haeger, H.; Wernz, J.; Jarke, M. Improving the Prediction of Passenger Numbers in Public Transit Networks by Combining Short-Term Forecasts with Real-Time Occupancy Data. IEEE Open J. Intell. Transp. Syst. 2023, 4, 153–174. [Google Scholar] [CrossRef]
- Hu, R.; Chiu, Y.-C.; Hsieh, C.-W. Crowding Prediction on Mass Rapid Transit Systems Using a Weighted Bidirectional Recurrent Neural Network. IET Intell. Transp. Syst. 2020, 14, 196–203. [Google Scholar] [CrossRef]
- Roncoli, C.; Chandakas, E.; Kaparias, I. Estimating On-Board Passenger Comfort in Public Transport Vehicles Using Incomplete Automatic Passenger Counting Data. Transp. Res. Part C Emerg. Technol. 2023, 146, 103963. [Google Scholar] [CrossRef] [PubMed]
- Hongmei, L.; Lin, H.; Ruiqiang, Z.; Lei, L.; Diangang, W.; Jiazhou, L. Object Tracking in Video Sequence Based on Kalman Filter. In Proceedings of the 2020 International Conference on Computer Engineering and Intelligent Control (ICCEIC), Chongqing, China, 6–8 November 2020; pp. 106–110. [Google Scholar]
- Vignarca, D.; Prakash, J.; Vignati, M.; Sabbioni, E. Improved Person Counting Performance Using Kalman Filter Based on Image Detection and Tracking. In Proceedings of the 2021 AEIT International Conference on Electrical and Electronic Technologies for Automotive (AEIT AUTOMOTIVE), Torino, Italy, 17–19 November 2021; pp. 1–6. [Google Scholar]
- Ahmad, M.; Ahmed, I.; Adnan, A. Overhead View Person Detection Using YOLO. In Proceedings of the 2019 IEEE 10th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 10–12 October 2019; pp. 0627–0633. [Google Scholar]
- Ahmad, M.; Ahmed, I.; Ullah, K.; Ahmad, M. A Deep Neural Network Approach for Top View People Detection and Counting. In Proceedings of the 2019 IEEE 10th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference (UEMCON), New York, NY, USA, 10–12 October 2019; pp. 1082–1088. [Google Scholar]
- Mccarthy, C.; Moser, I.; Jayaraman, P.P.; Ghaderi, H.; Tan, A.M.; Yavari, A.; Mehmood, U.; Simmons, M.; Weizman, Y.; Georgakopoulos, D.; et al. A Field Study of Internet of Things-Based Solutions for Automatic Passenger Counting. IEEE Open J. Intell. Transp. Syst. 2021, 2, 384–401. [Google Scholar] [CrossRef]
- Kniess, J.; Rutke, J.C.; Castañeda, W.A.C. An IoT Transport Architecture for Passenger Counting: A Real Implementation. In Proceedings of the 2021 IFIP/IEEE International Symposium on Integrated Network Management (IM), Bordeaux, France, 18–20 May 2021; pp. 613–617. [Google Scholar]
- Recalde, G.; Gregor, D.; Britez, D.; Arzamendia, M. Low-Cost in-Bus People Counting System for the Reordering of Urban Passenger Traffic Based on Artificial Vision and Neural Networks. In Proceedings of the 2021 IEEE CHILEAN Conference on Electrical, Electronics Engineering, Information and Communication Technologies (CHILECON), Online, 6–9 December 2021; pp. 1–4. [Google Scholar] [CrossRef]
- NVIDIA Jetson Nano Developer Kit|NVIDIA Developer. Available online: https://developer.nvidia.com/embedded/jetson-nano-developer-kit (accessed on 21 August 2022).
- Asti Servizi Pubblici, S.p.A. Carta Della Mobilità; Asti Servizi Pubblici S.p.A.: Asti, Italy, 2021. [Google Scholar]
- GTT—Gruppo Torinese Trasporti. Carta Della Mobilità GTT 2022; GTT: Turin, Italy, 2022. [Google Scholar]
- Azienda Trasporti Milanesi. Carta Della Mobilità ATM 2023; Azienda Trasporti Milanesi: Milan, Italy, 2023. [Google Scholar]
- Chicco, D.; Warrens, M.J.; Jurman, G. The Coefficient of Determination R-Squared Is More Informative than SMAPE, MAE, MAPE, MSE and RMSE in Regression Analysis Evaluation. PeerJ Comput. Sci. 2021, 7, e623. [Google Scholar] [CrossRef]
- Raspberry Pi Raspberry Pi 3 Model B. Available online: https://www.raspberrypi.com/products/raspberry-pi-3-model-b/ (accessed on 19 August 2023).
- Turnip, M.; Sitorus, R.T.; Limurty, J.; Siregar, S.D.; Laia, Y.; Dharma, A.; Sitanggang, D.; Indra, E. Detection of Vehicle Maximum Speed with an Infrared Sensor Based on Raspberry Pi 3 b+. In Proceedings of the 2020 3rd International Conference on Mechanical, Electronics, Computer, and Industrial Technology (MECnIT), Medan, Indonesia, 25–27 June 2020; pp. 317–320. [Google Scholar]
- Kamath, V.; Renuka, A. Performance Analysis of the Pretrained EfficientDet for Real-Time Object Detection on Raspberry Pi. In Proceedings of the 2021 International Conference on Circuits, Controls and Communications (CCUBE), Online, 23–24 December 2021; pp. 1–6. [Google Scholar]
- Gharge, S.; Patil, A.; Patel, S.; Shetty, V.; Mundhada, N. Real-Time Object Detection Using Haar Cascade Classifier for Robot Cars. In Proceedings of the 2023 4th International Conference on Electronics and Sustainable Communication Systems (ICESC), Online, 6–8 July 2023; pp. 64–70. [Google Scholar]
- Islam, M.T.; Ahmad, M.; Bappy, A.S. Real-Time Family Member Recognition Using Raspberry Pi for Visually Impaired People. In Proceedings of the 2020 IEEE Region 10 Symposium (TENSYMP), Dhaka, Bangladesh, 5–7 June 2020; pp. 78–81. [Google Scholar]
- Anand, G.; Kumawat, A.K. Object Detection and Position Tracking in Real Time Using Raspberry Pi. Mater. Today: Proc. 2021, 47, 3221–3226. [Google Scholar] [CrossRef]
- Jabbar, W.A.; Wei, C.W.; Azmi, N.A.A.M.; Haironnazli, N.A. An IoT Raspberry Pi-Based Parking Management System for Smart Campus. Internet Things 2021, 14, 100387. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018. [Google Scholar] [CrossRef]
- Soviany, P.; Ionescu, R.T. Optimizing the Trade-off between Single-Stage and Two-Stage Deep Object Detectors Using Image Difficulty Prediction. In Proceedings of the 2018 20th International Symposium on Symbolic and Numeric Algorithms for Scientific Computing (SYNASC), Timisoara, Romania, 20–23 September 2018; pp. 209–214. [Google Scholar]
- YOLOv5|PyTorch. Available online: https://pytorch.org/hub/ultralytics_yolov5/ (accessed on 22 September 2022).
- Rahaman, M.A.; Ali, M.M.; Ahmed, K.; Bui, F.M.; Mahmud, S.M.H. Performance Analysis between YOLOv5s and YOLOv5m Model to Detect and Count Blood Cells: Deep Learning Approach. In Proceedings of the 2nd International Conference on Computing Advancements, New York, NY, USA, 10–12 March 2022; ACM International Conference Proceeding Series. pp. 316–322. [Google Scholar] [CrossRef]
- Wu, W.; Liu, H.; Li, L.; Long, Y.; Wang, X.; Wang, Z.; Li, J.; Chang, Y. Application of Local Fully Convolutional Neural Network Combined with YOLO v5 Algorithm in Small Target Detection of Remote Sensing Image. PLoS ONE 2021, 16, e0259283. [Google Scholar] [CrossRef]
- Hou, X.; Wang, Y.; Chau, L.P. Vehicle Tracking Using Deep SORT with Low Confidence Track Filtering. In Proceedings of the 2019 16th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS 2019), Taipei, Taiwan, 18–21 September 2019. [Google Scholar] [CrossRef]
- Pei, Y.; Liu, H.; Bei, Q. Collision-Line Counting Method Using DeepSORT to Count Pedestrian Flow Density and Hungary Algorithm. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; pp. 621–626. [Google Scholar]
- Zhong, W.; Jiang, Y.-Q.; Zhang, X. Research on Road Object Detection Algorithm Based on YOLOv5+Deepsort. In Proceedings of the 2022 International Conference on Image Processing, Computer Vision and Machine Learning (ICICML), Xi’an, China, 28–30 October 2022; pp. 644–648. [Google Scholar]
- Verma, J.P.; Verma, P. Determining Sample Size and Power in Research Studies: A Manual for Researchers; Springer: Singapore, 2020; ISBN 9789811552038. [Google Scholar]
- Fort, A.; Peruzzi, G.; Pozzebon, A. Quasi-Real Time Remote Video Surveillance Unit for LoRaWAN-Based Image Transmission. In Proceedings of the 2021 IEEE International Workshop on Metrology for Industry 4.0 & IoT (MetroInd4.0&IoT), Rome, Italy, 7–9 June 2021; pp. 588–593. [Google Scholar]











| APC System | Boarding | Alighting | Vehicle Occupancy |
|---|---|---|---|
| Low-cost APC system | |||
| Overall accuracy in six-day period | 72.27% | 74.59% | 81.59% |
| Uncrowded line | 83.53% | 94.87% | 82.46% |
| Crowded line | 65.83% | 66.68% | 80.38% |
| Commercial APC system | |||
| Overall accuracy Asti’s twenty-day period | 53.17% | 55.29% | 57.74% |
| Uncrowded line | 77.69% | 83.33% | 50.94% |
| Crowded line | - | - | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pronello, C.; Garzón Ruiz, X.R. Evaluating the Performance of Video-Based Automated Passenger Counting Systems in Real-World Conditions: A Comparative Study. Sensors 2023, 23, 7719. https://doi.org/10.3390/s23187719
Pronello C, Garzón Ruiz XR. Evaluating the Performance of Video-Based Automated Passenger Counting Systems in Real-World Conditions: A Comparative Study. Sensors. 2023; 23(18):7719. https://doi.org/10.3390/s23187719
Chicago/Turabian StylePronello, Cristina, and Ximena Rocio Garzón Ruiz. 2023. "Evaluating the Performance of Video-Based Automated Passenger Counting Systems in Real-World Conditions: A Comparative Study" Sensors 23, no. 18: 7719. https://doi.org/10.3390/s23187719
APA StylePronello, C., & Garzón Ruiz, X. R. (2023). Evaluating the Performance of Video-Based Automated Passenger Counting Systems in Real-World Conditions: A Comparative Study. Sensors, 23(18), 7719. https://doi.org/10.3390/s23187719