
Micro-Doppler Signature Detection and Recognition of UAVs Based on OMP Algorithm

Abstract
:1. Introduction
2. Echo Signal Model
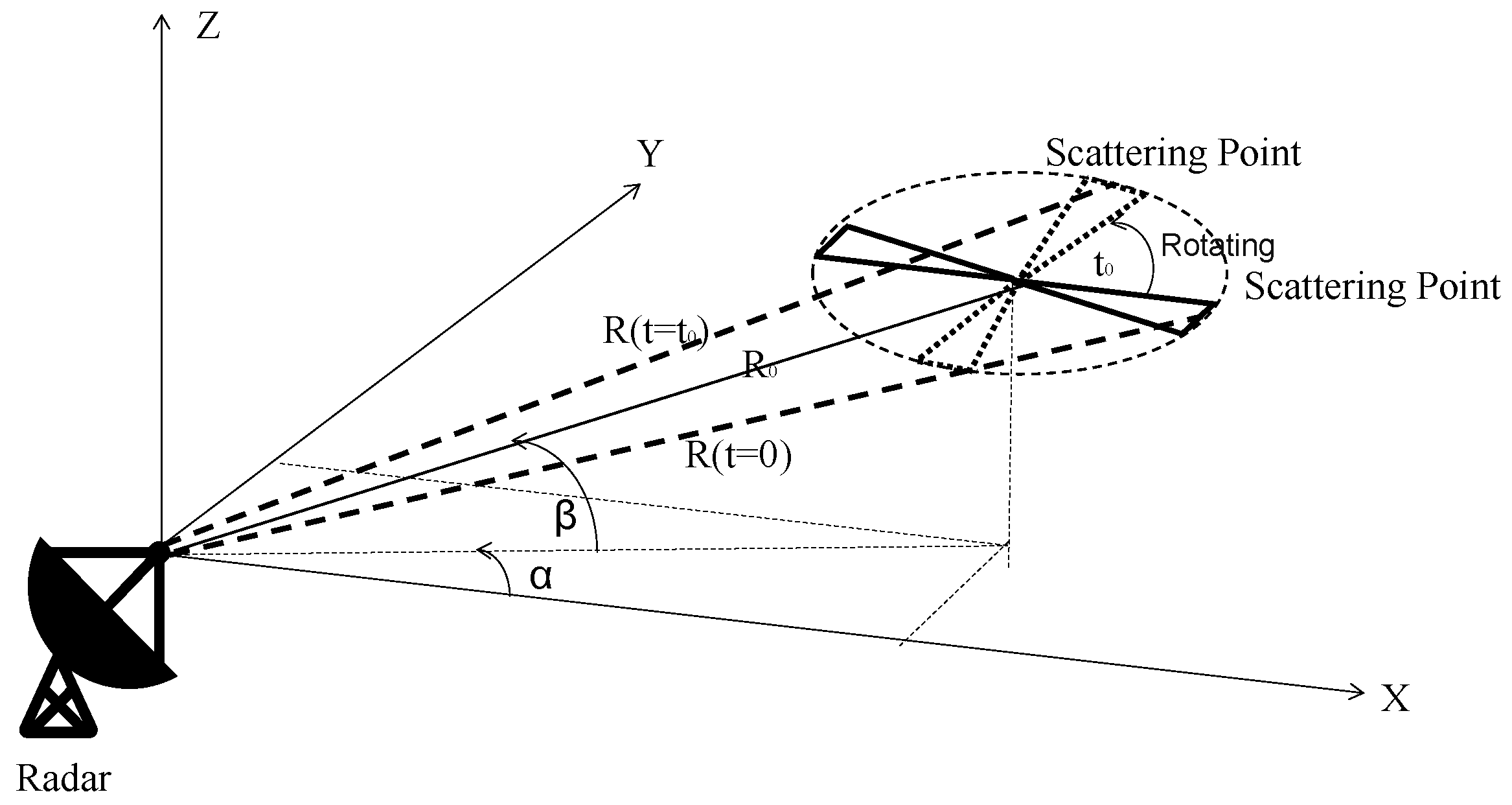
2.1. Micro-Doppler Echo Model
2.2. Estimation of Rotor Blade Parameters
3. Clutter Suppression Method Based on OMP Algorithm
3.1. Sparse Representation
3.2. OMP Dictionary Setting Methods
3.3. Echo Signal Processing Based on OMP Algorithm
- (1)
- First, the dictionary formed by the clutter and the theoretical modeling echo of UAV non detection points should be provided, as well as the echo signal received by the radar in a UAV recognition scenario. A STOP_CRITERION is used to stop the algorithm. Typically, the algorithm stops when the residual is less than a certain threshold. In this paper, STOP_CRITERION will stop the algorithm when all the elements in participate in the calculation.
- (2)
- Then, the iteration process should be initialized to begin the search process. Set the initial residual of the original signal to the original signal. Create the empty sub-matrix and the empty index vector to register the selected atom and its index in each iteration, respectively. Initialize the counter iteration number to 0.
- (3)
- In the iterative procedure, the maximum absolute inner product should be found, where is the jth atom of the dictionary . The inner product is computed to find a part of the signal energy contained in a specific atom. Therefore, the signal can be decomposed atom by atom during the iterative. Then, and are registered in matrix and , respectively. The counter iteration j increments by one. And the atom is removed from dictionary .
- (4)
- The calculation process of updating the residual is a process of solving the optimization problem, that is, . The length of the vector is equal to the number of non-zero elements of the vector , which is initialized to the zero vector every time this step is executed. The optimization problem can be solved through the least square method, which can be represented aswhere is the Moore–Penrose pseudo-inverse matrix of . Thus, once the pseudo-inverse matrix of is found, the sparse contribution vector is obtained with the linear combination between this new matrix and the signal.
- (5)
- If the number of iterations is equal to the number of atoms in , complete the iteration. Otherwise, repeat steps (3) and (4).
- (6)
- Iteration is a process of gradually determining the correlation between atoms in a dictionary and the received signal. When the iteration is completed, clutter that does not contain the target detection part of the received signal is removed from the original signal. Finally, the target echo obtained after clutter suppression can be expressed as [31]where is the jth element of .
| Algorithm 1 Clutter suppression method based on OMP algorithm |
| Input: The dictionary formed by the clutter and the theoretical modeling echo of UAV non–detection points, ; The echo signal received by radar in the UAV identification scenario, ; The empty matrix used to store sub dictionary, ; The empty vector used to store the selected atoms and their index number, ; Output: The echo signal after clutter suppression, ; 1: Calculate the absolute inner product of atom and ; 2: Find the largest absolute inner product , register and in matrix and respectively; 3: if length () ≤ initial length () then 4: Update and repeat steps 1,2; 5: else 6: Stop iteration; 7: end if 8: Filter out from ; 9: return and ; |
4. Simulations and Experiments
4.1. Simulations and Analysis
4.2. Field Experiments and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- McTegg, S.J.; Tarsha Kurdi, F.; Simmons, S.; Gharineiat, Z. Comparative Approach of Unmanned Aerial Vehicle Restrictions in Controlled Airspaces. Remote Sens. 2022, 14, 822. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Kang, K.B.; Choi, J.H.; Cho, B.L.; Lee, J.S.; Kim, K.T. Analysis of Micro-Doppler Signatures of Small UAVs Based on Doppler Spectrum. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3252–3267. [Google Scholar] [CrossRef]
- Fioranelli, F.; Ritchie, M.; Gürbüz, S.Z.; Griffiths, H. Feature Diversity for Optimized Human Micro-Doppler Classification Using Multistatic Radar. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 640–654. [Google Scholar] [CrossRef]
- Ritchie, M.; Fioranelli, F.; Borrion, H.; Griffiths, H. Multistatic micro-Doppler radar feature extraction for classification of unloaded/loaded micro-drones. IET Radar Sonar Navig. 2017, 11, 116–124. [Google Scholar] [CrossRef]
- Park, D.; Lee, S.; Park, S.; Kwak, N. Radar-Spectrogram-Based UAV Classification Using Convolutional Neural Networks. Sensors 2021, 21, 210. [Google Scholar] [CrossRef]
- Chen, V.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Hou, H.; Yang, Z.; Pang, C. Rotor UAV’s Micro-Doppler Signal Detection and Parameter Estimation Based on FRFT-FSST. Sensors 2021, 21, 7314. [Google Scholar] [CrossRef]
- Mahmood, M.; Jalal, A.; Evans, H.A. Facial Expression Recognition in Image Sequences Using 1D Transform and Gabor Wavelet Transform. In Proceedings of the 2018 International Conference on Applied and Engineering Mathematics (ICAEM), Taxila, Pakistan, 4–5 September 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Villa-Cañas, T.; Arias-Londoño, J.; Vargas-Bonilla, J.; Orozco-Arroyave, J. Time-frequency approach in continuous speech for detection of Parkinson’s disease. In Proceedings of the 2015 20th Symposium on Signal Processing, Images and Computer Vision (STSIVA), Bogota, Colombia, 2–4 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ramakanth, S.; Soundarresan, S.; Arumuganainar, D.; Mamgain, R.; Kumaraswamy, H.V. Extraction of jet engine parameters from micro-Doppler signatures using continuous wavelet transform. IET Radar Sonar Navig. 2021, 15, 194–207. [Google Scholar] [CrossRef]
- Chen, Z. Noise Reduction of Bird Calls Based on a Combination of Spectral Subtraction, Wiener Filtering, and Kalman Filtering. In Proceedings of the 2022 IEEE 5th International Conference on Automation, Electronics and Electrical Engineering (AUTEEE), Shenyang, China, 18–20 November 2022; pp. 512–517. [Google Scholar] [CrossRef]
- Pohjalainen, J.; Fabien Ringeval, F.; Zhang, Z.; Schuller, B. Spectral and Cepstral Audio Noise Reduction Techniques in Speech Emotion Recognition. In Proceedings of the 24th ACM International Conference on Multimedia—MM’16, Amsterdam, The Netherlands, 15–19 October 2016; pp. 670–674. [Google Scholar] [CrossRef]
- Devi, T.M.; Kasthuri, N.; Natarajan, A. Environmental noise reduction system using fuzzy neural network and adaptive fuzzy algorithms. Int. J. Electron. 2013, 100, 205–226. [Google Scholar] [CrossRef]
- Thuene, P.; Enzner, G. Maximum-Likelihood Approach to Adaptive Multichannel-Wiener Postfiltering for Wind-Noise Reduction. In Proceedings of the Speech Communication—12th ITG Symposium, Paderborn, Germany, 5–7 October 2016; pp. 1–5. [Google Scholar]
- Gu, F.F.; Fu, M.H.; Liang, B.S.; Li, K.M.; Zhang, Q. Translational Motion Compensation and Micro-Doppler Feature Extraction of Space Spinning Targets. IEEE Geosci. Remote Sens. Lett. 2018, 15, 1550–1554. [Google Scholar] [CrossRef]
- Shukla, S.; Mishra, S.; Singh, B. Power Quality Event Classification Under Noisy Conditions Using EMD-Based De-Noising Techniques. IEEE Trans. Ind. Electron. 2014, 10, 1044–1054. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, X.; Li, W.; Li, Z.; Zhang, Y.; Zhou, J. Analysis of micro-Doppler signatures of vibration targets using EMD and SPWVD. Neurocomputing 2016, 171, 48–56. [Google Scholar] [CrossRef]
- Cai, C.; Liu, W.; Fu, J.; Lu, L. Empirical mode decomposition of micro-Doppler signature. In Proceedings of the IEEE International Radar Conference, Arlington, VA, USA, 9–12 May 2005; pp. 895–899. [Google Scholar] [CrossRef]
- Li, Y.; Du, L.; Liu, H. Analysis of micro-Doppler signatures of moving vehicles by using empirical mode decomposition. In Proceedings of the 2011 IEEE CIE International Conference on Radar, Chengdu, China, 24–27 October 2011; Volume 1, pp. 600–603. [Google Scholar] [CrossRef]
- Zhai, S.; Mao, T.; Hu, B. An EMD-Based Micro-Doppler Signature for Moving Vehicles Classification. In Proceedings of the 2019 IEEE 5th International Conference on Computer and Communications (ICCC), Chengdu, China, 6–9 December 2019; pp. 1322–1326. [Google Scholar] [CrossRef]
- Li, G.; Varshney, P.K. Micro-Doppler Parameter Estimation via Parametric Sparse Representation and Pruned Orthogonal Matching Pursuit. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4937–4948. [Google Scholar] [CrossRef]
- Luo, Y.; Zhang, Q.; Qiu, C.; Li, S.; Soon Yeo, T. Micro-Doppler feature extraction for wideband imaging radar based on complex image orthogonal matching pursuit decomposition. IET Radar Sonar Navig. 2013, 7, 914–924. [Google Scholar] [CrossRef]
- Crespo Marques, E.; Maciel, N.; Naviner, L.; Cai, H.; Yang, J. A Review of Sparse Recovery Algorithms. IEEE Access 2019, 7, 1300–1322. [Google Scholar] [CrossRef]
- Pati, Y.; Rezaiifar, R.; Krishnaprasad, P. Orthogonal matching pursuit: Recursive function approximation with applications to wavelet decomposition. In Proceedings of the 27th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 1–3 November 1993; Volume 1, pp. 40–44. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, W.; Zhou, M.; Ren, A.; Tian, Z. Remote Monitoring of Human Vital Signs Based on 77-GHz mm-Wave FMCW Radar. Sensors 2020, 20, 2999. [Google Scholar] [CrossRef]
- Sreeharitha, S.; Sabarinath, G.; Jose, B.R. Compressive Sensing Recovery Algorithms and Applications- A Survey. IOP Conf. Ser. Mater. Sci. Eng. 2018, 396, 012037. [Google Scholar] [CrossRef]
- Bao, C.; Ji, H.; Quan, Y.; Shen, Z. Dictionary Learning for Sparse Coding: Algorithms and Convergence Analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 38, 1356–1369. [Google Scholar] [CrossRef]
- Li, J.; Teng, Z.; Tang, Q.; Song, J. Detection and Classification of Power Quality Disturbances Using Double Resolution S-Transform and DAG-SVMs. IEEE Trans. Instrum. Meas. 2016, 65, 2302–2312. [Google Scholar] [CrossRef]
- Morales-Perez, C.; Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Martínez-Carballido, J. Technique for Signal Noise Reduction based on Sparse Representation. In Proceedings of the 2018 IEEE International Autumn Meeting on Power, Electronics and Computing (ROPEC), Ixtapa, Mexico, 14–16 November 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Morales-Perez, C.J.; de Jesus Rangel-Magdaleno, J.; Peregrina-Barreto, H.; Garcia-Perez, A.; Ramirez-Cortes, J.M. Noise Reduction in Electrical Signal Using OMP Algorithm Based on DCT and DSC Dictionaries. IEEE Trans. Instrum. Meas. 2022, 71, 6500811. [Google Scholar] [CrossRef]
- Al-Badrawi, M.H.; Kirsch, N.J. An EMD-Based Double Threshold Detector for Spectrum Sensing in Cognitive Radio Networks. In Proceedings of the 2015 IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 September 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Harvey, B.; O’Young, S. A CFAR-Enhanced Spectral Whitening Method for Acoustic Sensing via UAVs. Drones 2018, 2, 1. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value or Description |
|---|---|
| Cartesian coordinate of radar (unit 1 m) | [0, 0, 0] |
| Cartesian coordinate of UAV (unit 1 m) | [100, 100, 0] |
| Radar carrier frequency | 5 GHz |
| Number of UAV blades N | 2 |
| UAV blade rotational speed | 30 r/s |
| UAV blade length | 0.3 m |
| UAV motion status | hover |
| SNR of received signal | (−5 dB, −10 dB, −15 dB) |
| DJI PHANTOM 4PRO | |||
|---|---|---|---|
| Feature Parameters | Theoretical | Estimated | Deviation |
| Doppler shift | 1913.7 Hz | 1843.4 Hz | 3.67% |
| Rotor rotational speed | 107.0 r/s | 101.3 r/s | 5.33% |
| Blade length | 120.0 mm | 122.1 mm | 1.75% |
| DJI Mini 3 | |||
| Feature parameters | Theoretical | Estimated | Deviation |
| Doppler | 1346.0 Hz | 1370.3 Hz | 1.8% |
| Rotor rotational speed | 100.7 r/s | 100 r/s | 0.7% |
| Blade length | 70.0 mm | 67.3 mm | 3.9% |
| a UAV based on PIX2.4.8 | |||
| Feature parameters | Theoretical | Estimated | Deviation |
| Doppler shift | 2210.6 Hz | 2180.2 Hz | 1.37% |
| Rotor rotational speed | 80.0 r/s | 83.3 r/s | 4.12% |
| Blade length | 132.0 mm | 125.0 mm | 6.30% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, S.; Wu, Z.; Xu, W.; Zhu, J.; Tu, G. Micro-Doppler Signature Detection and Recognition of UAVs Based on OMP Algorithm. Sensors 2023, 23, 7922. https://doi.org/10.3390/s23187922
Fan S, Wu Z, Xu W, Zhu J, Tu G. Micro-Doppler Signature Detection and Recognition of UAVs Based on OMP Algorithm. Sensors. 2023; 23(18):7922. https://doi.org/10.3390/s23187922
Chicago/Turabian StyleFan, Shiqi, Ziyan Wu, Wenqiang Xu, Jiabao Zhu, and Gangyi Tu. 2023. "Micro-Doppler Signature Detection and Recognition of UAVs Based on OMP Algorithm" Sensors 23, no. 18: 7922. https://doi.org/10.3390/s23187922
APA StyleFan, S., Wu, Z., Xu, W., Zhu, J., & Tu, G. (2023). Micro-Doppler Signature Detection and Recognition of UAVs Based on OMP Algorithm. Sensors, 23(18), 7922. https://doi.org/10.3390/s23187922