

Metal Microelectromechanical Resonator Exhibiting Fast Human Activity Detection



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Sensor Design and Fabrication
3. Results
- (a)
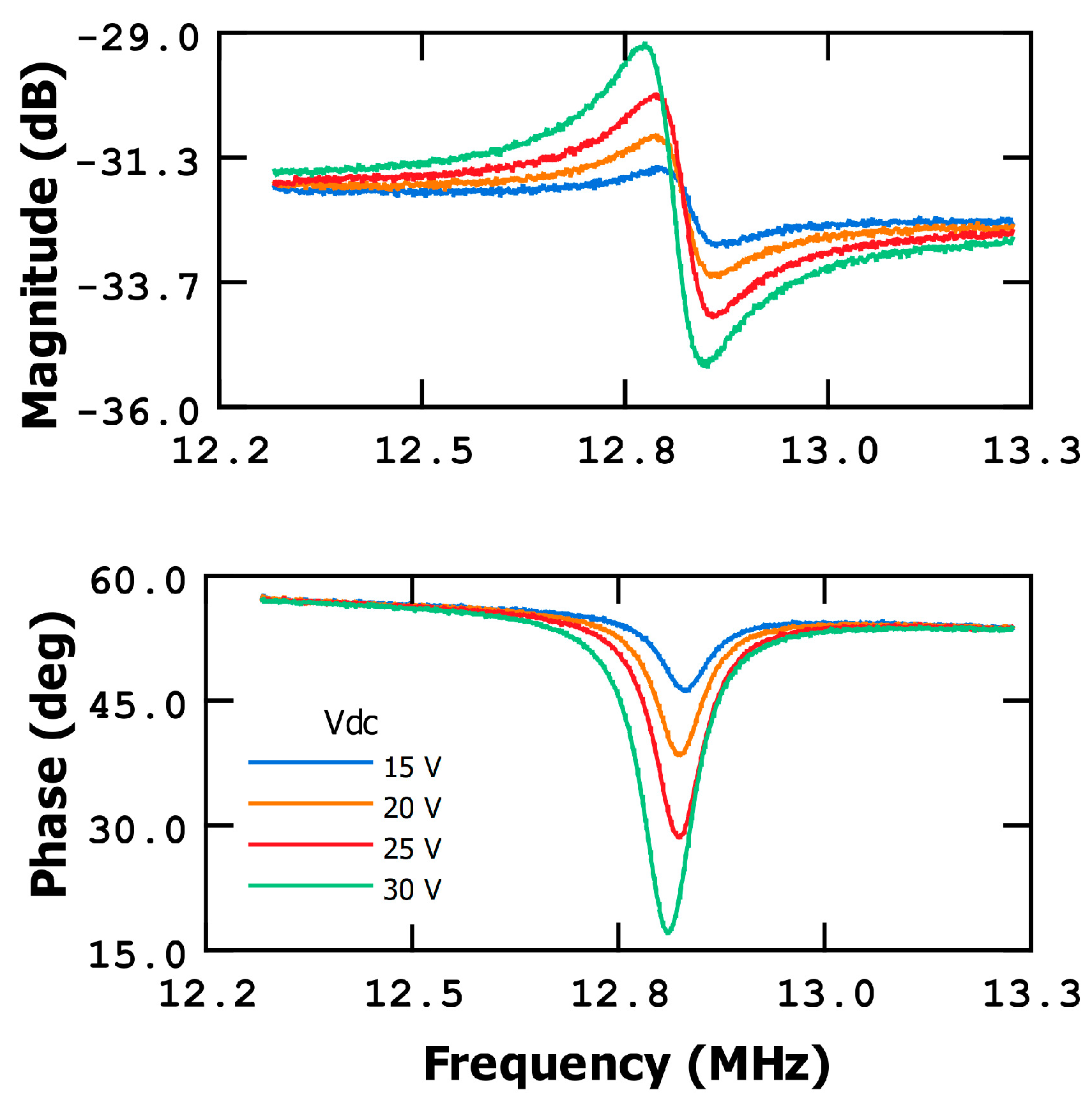
- First, we have selected a specific point on the magnitude or phase curves corresponding to the resonant frequency of the bare bridge (without added water, and with the sensor far from human body). For the magnitude curve, the point is at the maximum value of the curve. For the phase curve, this point is at the maximum slope of the phase curve (see Figure 2).
- (b)
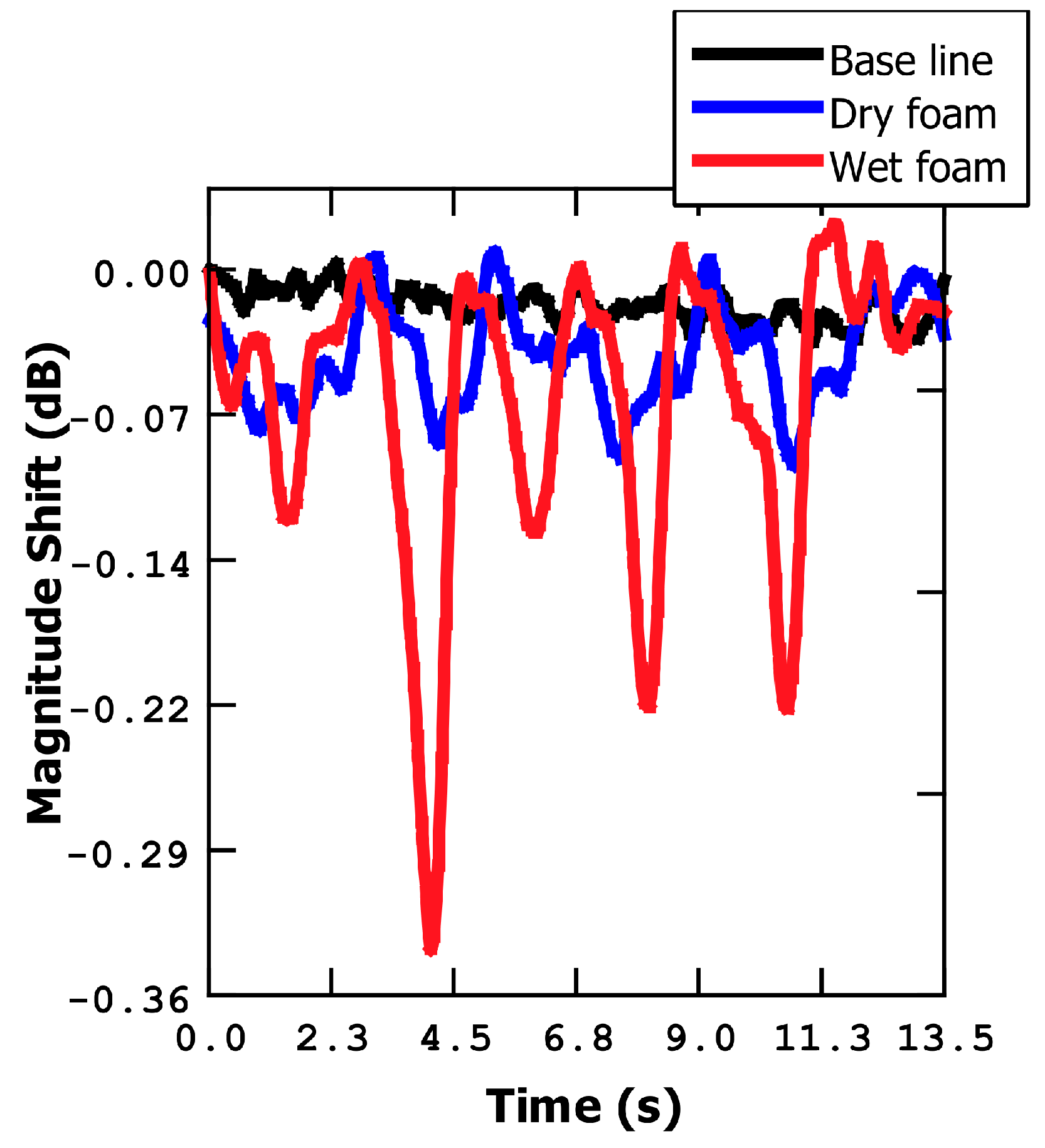
- After that, the measurements are conducted with a frequency sweep span of zero. By fixing the frequency and recording the phase or magnitude values at the chosen point, a straight (horizontal) line can be obtained on the magnitude/phase versus the measurement event plot (see Figure 3, baseline, as an example). This line will maintain a constant measured value until a mass addition event occurs.
- (c)
- When we approximate a human body part, in our case the fingertip, or breathing over the sensor, the frequency response curve shifts to the left (towards lower frequencies) due to the added mass (water) and therefore, the measurement (with a frequency sweep span of zero) reflects this change by altering the constant value (magnitude or phase) to a lower value (see Figure 3, wet foam, as an example). When the fingertip is moved far away or we stop breathing onto the bridge, the measurement returns to the initial value, showing a dewetting process of the metal bridge.
3.1. Foam Measurements
3.2. Sensor Calibration (Phase Shift versus Distance)
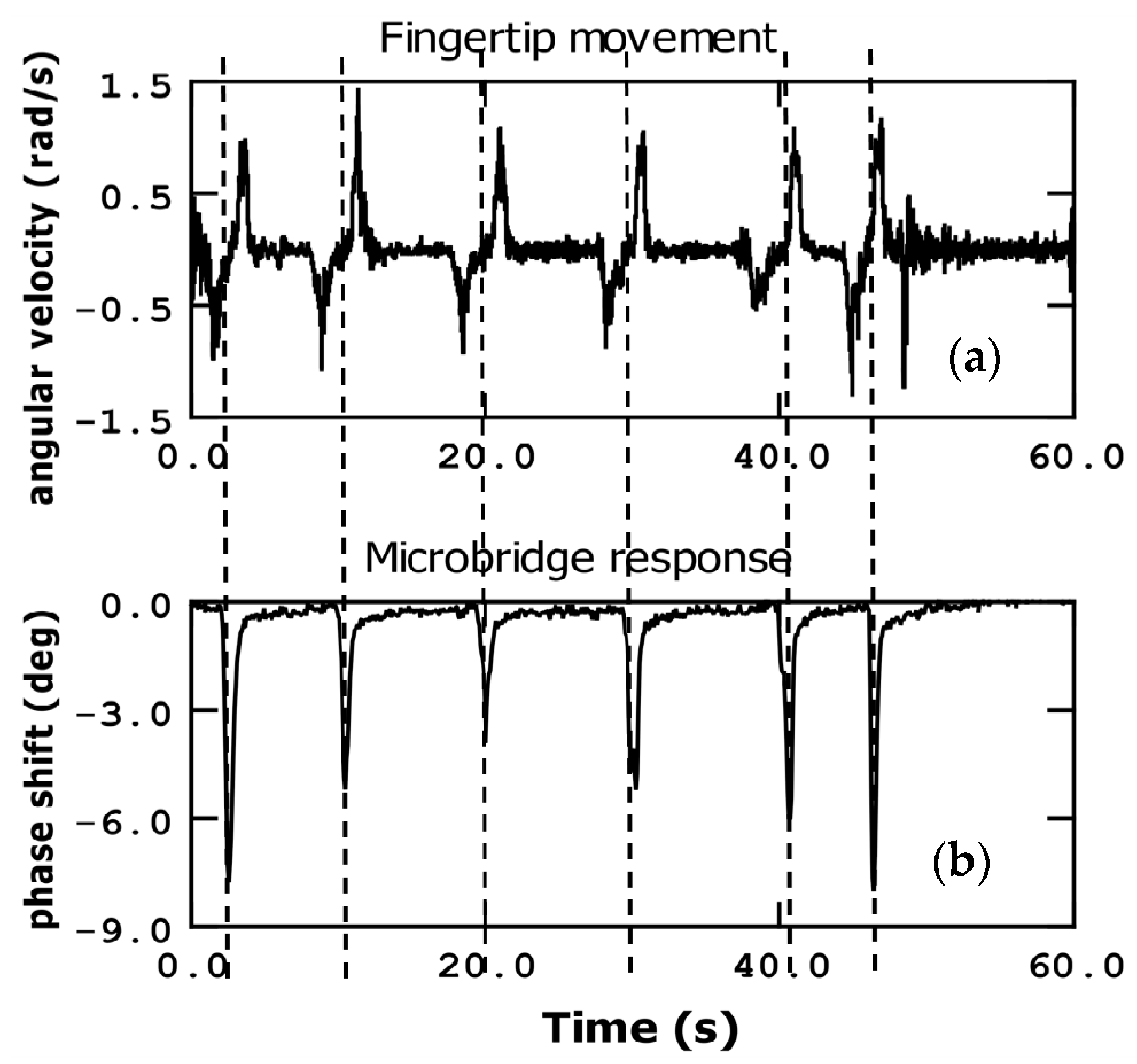
3.3. Application: Finger Movement
3.3.1. Phase Shift Detection
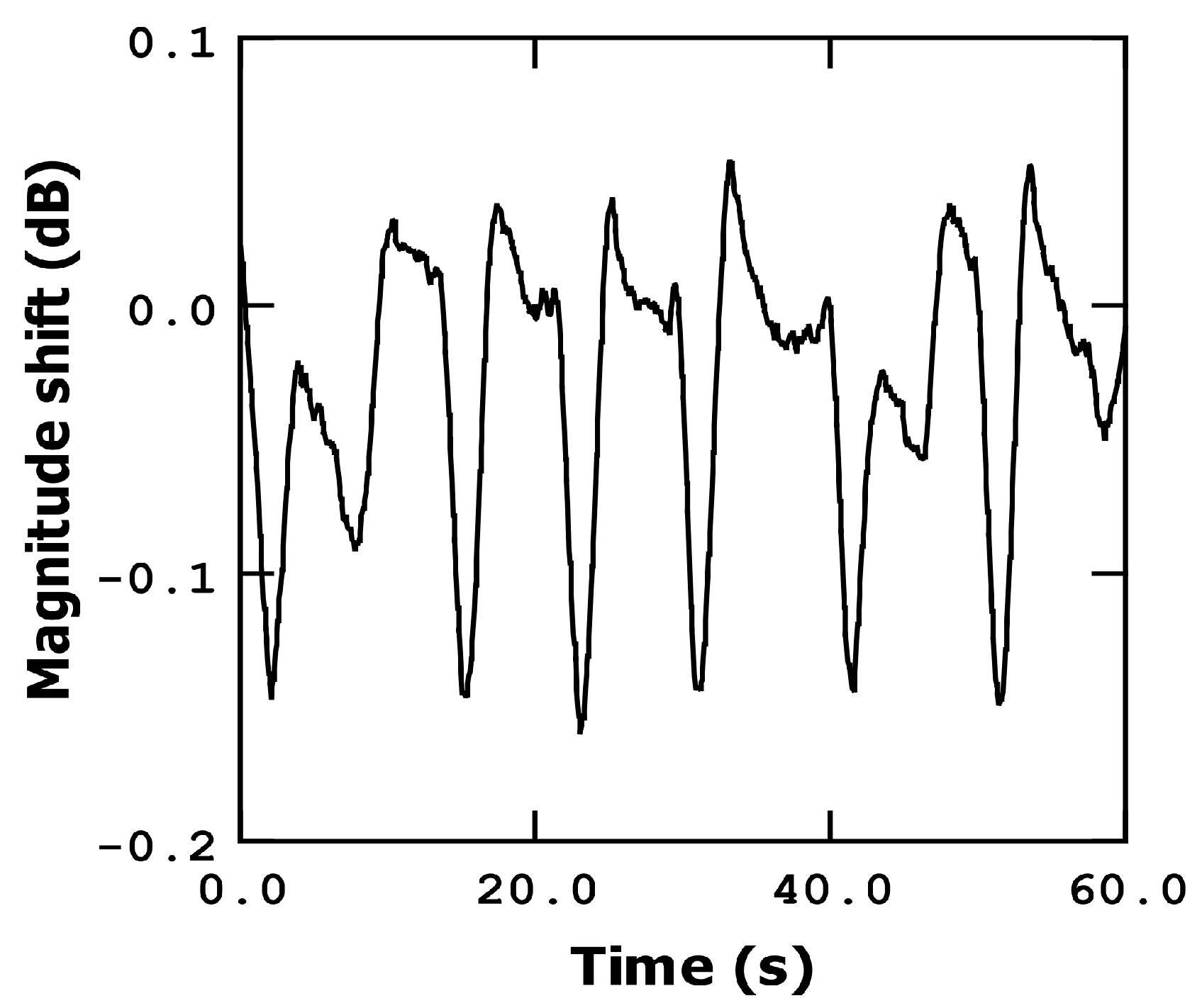
3.3.2. Finger Movement: Magnitude Shift Detection
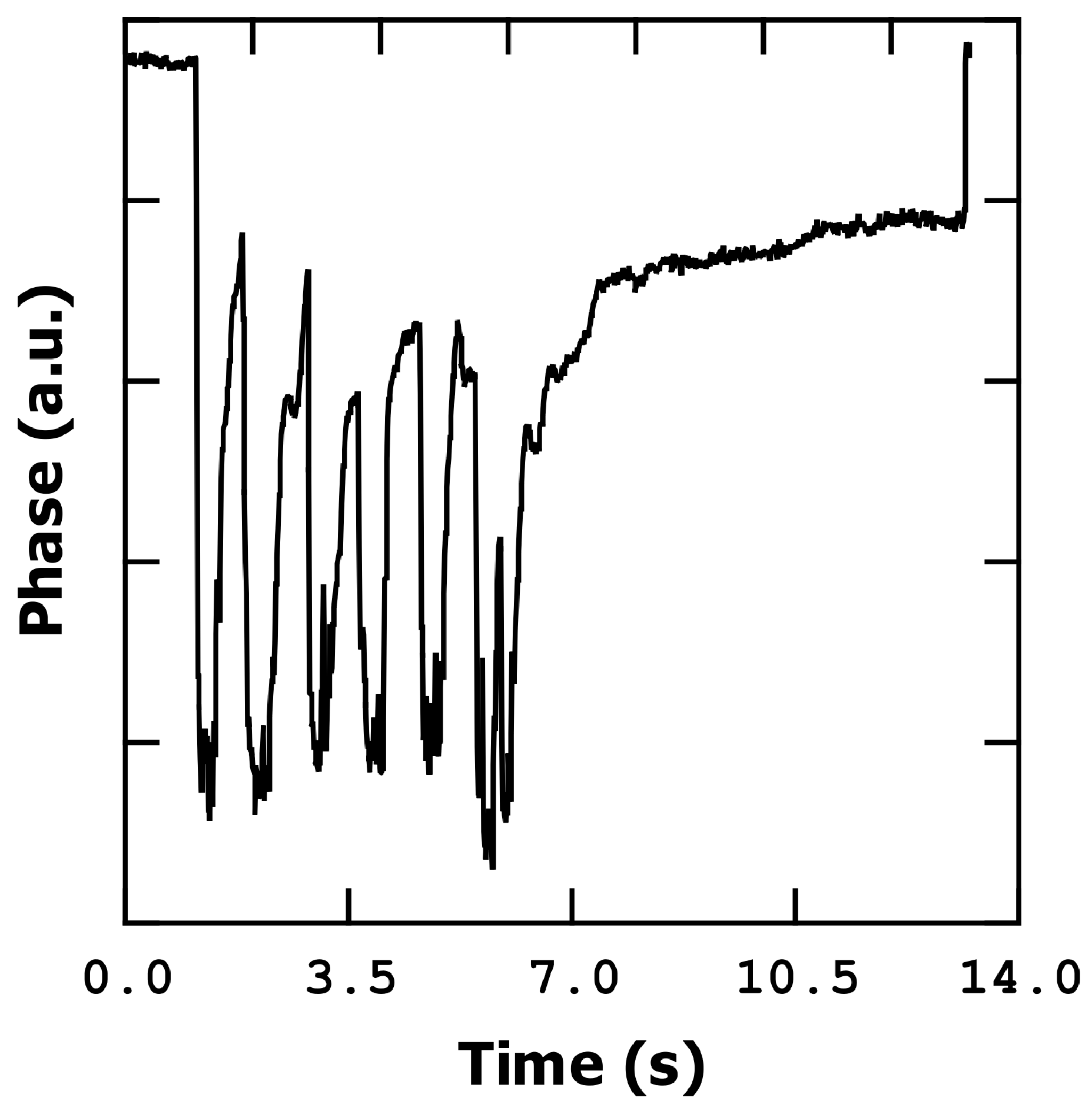
3.4. Breath Detection
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Hernández, A.; Morales, V.; García, V. Finger tapping test. Precisión del diseño de medidas entre muestras de deportistas de élite y no deportistas. Cuad. De Psicol. Del Deporte 2011, 11, 29–43. [Google Scholar] [CrossRef]
- Memon, M.M.; Liu, Q.; Manthar, A.; Wang, T.; Zhang, W. Surface acoustic wave humidity sensor: A review. Micromachines 2023, 14, 945. [Google Scholar] [CrossRef] [PubMed]
- Tai, H.L.; Wang, S.; Duan, Z.H.; Jiang, Y.D. Evolution of breath analysis based on humidity and gas sensors: Potential and challenges. Sens. Actuators B Chem. 2020, 318, 128104. [Google Scholar] [CrossRef]
- Dai, J.; Zhao, H.; Lin, X.; Liu, S.; Liu, Y.; Liu, X.; Fei, T.; Zhang, T. Ultrafast Response Polyelectrolyte Humidity Sensor for Respiration Monitoring. ACS Appl. Mater. Interfaces 2019, 11, 6483–6490. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Chen, L.; Zhang, Q.; Huang, J. A breathable capacitive humidity sensor based on electrospun PVDF/GO composites. In Proceedings of the Transducers Conference, Kyoto, Japan, 25–29 June 2023; Institute of Electrical Engineers of Japan: Tokyo, Japan, 2023; pp. 1081–1084, ISBN 978-4-88686-435-2. [Google Scholar]
- Su, Y.; Li, C.; Li, M.; Li, H.; Xu, S.; Qian, L.; Yang, B. Surface acoustic wave humidity sensor based on three-dimensional architecture graphene/PVA/SiO2 and its application for respiration monitoring. Sens. Actuators B Chem. 2020, 308, 127693. [Google Scholar] [CrossRef]
- Jang, I.R.; Jung, S.I.; Ryu, C.; Park, J.; Padhan, A.; Yu, J.; Keum, H.; Kim, H.J. Graphene oxide integrated surface acoustic wave humidity sensor with simultaneous multi-frequency operation. In Proceedings of the Transducers Conference, Kyoto, Japan, 25–29 June 2023; Institute of Electrical Engineers of Japan: Tokyo, Japan, 2023; pp. 1833–1836, ISBN 978-4-88686-435-2. [Google Scholar]
- Farahani, H.; Wagiran, R.; Hamidon, M.N. Humidity sensors principle, mechanism, and fabrication technologies: A Comprehensive Review. Sensors 2014, 14, 7881–7939. [Google Scholar] [CrossRef]
- Niu, G.; Wang, Z.; Xue, Y.; Yan, J.; Dutta, A.; Chen, X.; Wang, Y.; Liu, C.; Du, S.; Guo, L.; et al. Pencil-on-paper humidity sensor treated with NaCl solution for health monitoring and skin characterization. Nano Lett. 2023, 23, 1252–1260. [Google Scholar] [CrossRef]
- Dong, H.; Li, D.; Pang, J.; Zhang, Q.; Xie, J. Highly sensitive and fast-response humidity sensor based on SAW resonator and MoS2 for human activity detection. In Proceedings of the IEEE 34th International Conference on Micro Electro Mechanical Systems (MEMS), Gainesville, FL, USA, 25–29 January 2021; pp. 322–325. [Google Scholar] [CrossRef]
- Jung, S.I.; Jang, I.R.; Ryu, C.; Park, J.; Padhan, A.M.; Kim, H.J. Graphene oxide decorated multi-frequency surface acoustic wave humidity sensor for hygienic applications. Sci. Rep. 2023, 12, 6838-1–6838-11. [Google Scholar] [CrossRef]
- Chen, G.; Dai, X.; Liu, Y.; Mao, H.; Chen, D. A highly sensitive humidity sensor based on nanoforests. In Proceedings of the IEEE 34th International Conference on Micro Electro Mechanical Systems (MEMS), Gainesville, FL, USA, 25–29 January 2021; pp. 330–333. [Google Scholar] [CrossRef]
- Xu, J.; Peiner, E. Micromachined silicon cantilever resonator-based humidity sensors for multifunctional applications. In Proceedings of the IEEE 34th International Conference on Micro Electro Mechanical Systems (MEMS), Gainesville, FL, USA, 25–29 January 2021; pp. 326–329. [Google Scholar] [CrossRef]
- Arcamone, J.; Sansa, M.; Verd, J.; Uranga, A.; Abadal, G.; Barniol, N.; van den Boogaart, M.; Brugger, J.; Pérez-Murano, F. Nanomechanical mass sensor for spatially resolved ultrasensitive monitoring of deposition rates in stencil lithography. Small 2009, 5, 176–180. [Google Scholar] [CrossRef] [PubMed]
- Verd, J.; Sansa, M.; Uranga, A.; Pérez-Murano, F.; Segura, J.; Barniol, N. Metal microelectromechanical oscillator exhibiting ultra-high water vapor resolution. Lab Chip 2011, 11, 2670–2672. [Google Scholar] [CrossRef] [PubMed]
- Perelló-Roig, R.; Verd, J.; Bota, S.; Soberats, B.; Costa, A.; Segura, J. CMOS-MEMS VOC sensors functionalized via inkjet polymer deposition for high-sensitivity acetone detection. Lab Chip 2021, 21, 3307–3315. [Google Scholar] [CrossRef] [PubMed]
- Perelló-Roig, R.; Orvay, F.; Paúl, I.; Verd, J.; Bota, S.; Segura, J. Fully integrated front-end CMOS-MEMS transducer for low-cost real-time breath monitoring. In Proceedings of the IEEE Sensors Conference, Dallas, TX, USA, 30 October–2 November 2022. [Google Scholar] [CrossRef]
- Li, D.; Liu, W.; Zhu, B.; Qu, M.; Zhang, Q.; Fu, Y.; Xie, J. Machine learning-assisted multifunctional environmental sensing based on a piezoelectric cantilever. ACS Sens. 2022, 7, 2767–2777. [Google Scholar] [CrossRef] [PubMed]
- Nuryadi, R.; Djajadi, A.; Adiel, R.; Aprilina, L.; Aisah, N. Resonance frequency change in microcantilever-based sensor due to humidity variation. Mater. Sci. Forum 2013, 737, 176–182. [Google Scholar] [CrossRef]
- Dennis, J.; Ahmed, A.; Khir, M. Fabrication and characterization of a CMOS-MEMS humidity sensor. Sensors 2015, 15, 16674–16687. [Google Scholar] [CrossRef] [PubMed]
- Shmid, S.; Villanueva, L.G.; Roukes, M.L. Fundamentals of Nanomechanical Resonators, 1st ed.; Springer International Publishing: Cham, Switzerland, 2016; p. 39. [Google Scholar] [CrossRef]
- Verd, J.; Uranga, A.; Abadal, G.; Teva, J.L.; Torres, F.; López, J.; Pérez-Murano, F.; Esteve, J.; Barniol, N. Monolithic CMOS MEMS oscillator circuit for sensing in the attogram range. IEEE Electron. Dev. Lett. 2008, 2, 146–148. [Google Scholar] [CrossRef]
- Verd, J.; Uranga, A.; Teva, J.; López, J.L.; Torres, F.; Esteve, J.; Abadal, G.; Pérez-Murano, F.; Barniol, N. Integrated CMOS-MEMS with on-chip readout electronics for high-frequency applications. IEEE Electron. Dev. Lett. 2006, 27, 495–497. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torres, F.; Uranga, A.; Barniol, N. Metal Microelectromechanical Resonator Exhibiting Fast Human Activity Detection. Sensors 2023, 23, 8945. https://doi.org/10.3390/s23218945
Torres F, Uranga A, Barniol N. Metal Microelectromechanical Resonator Exhibiting Fast Human Activity Detection. Sensors. 2023; 23(21):8945. https://doi.org/10.3390/s23218945
Chicago/Turabian StyleTorres, Francesc, Arantxa Uranga, and Núria Barniol. 2023. "Metal Microelectromechanical Resonator Exhibiting Fast Human Activity Detection" Sensors 23, no. 21: 8945. https://doi.org/10.3390/s23218945
APA StyleTorres, F., Uranga, A., & Barniol, N. (2023). Metal Microelectromechanical Resonator Exhibiting Fast Human Activity Detection. Sensors, 23(21), 8945. https://doi.org/10.3390/s23218945