
Limited Sampling Spatial Interpolation Evaluation for 3D Radio Environment Mapping



Abstract
:1. Introduction
- An evaluation of interpolation efficiency was performed for RF data gathered in real-world indoor and outdoor scenarios, in 2D space for different altitudes, which provides insight into the exploration of the same methods in the case of spatial 3D data when only a limited number of samples is available. A normalised root-mean-squared error (NRMSE) of as little as −9.5 dB was achieved for a sampling ratio of 21%. The characteristics of the methods’ performance and the processed measurement samples were analysed by the Kriging error STD values and their densities and the STD of the distances between each measurement point and the estimated points.
- Several challenges for the future development of REM interpolation methods and for the analysis of spatial RoIs are described, on the basis of the signal propagation characteristics’ influence on the interpolation accuracy. These challenges facilitate the further investigation into the spatial 3D spectrum occupancy in indoor and UAV-based experimental setups.
2. Related Work
3. Experimental Setups and RF Data
3.1. Indoor 3D RF Measurements’ Scenario
3.2. Outdoor 3D RF Measurements’ Scenario
3.3. Experimental RF Datasets and Interpolation Methods
- Choose a subset of points (out of the set ) that are the closest to the unknown point u. These points are fit to an empirical variogram function (such as exponential, Matern, or spherical). The points’ values were obtained as a function of by dividing the points into subsets according to their distance from u.
- Then, for each subset, the variogram is described as in (2):where is the number of pairs of measured points that are separated by a distance h. Then, the variogram’s form, as well as its parameters (nugget, sill, and range) were determined empirically from the resulting function (as described in [23]).
- The Kriging weights were computed by using the covariances between every two known points and between the estimated point and the observed points. These covariances were computed by equations that included the variogram’s form and depended on the distance h between every two points, the nugget, sill, and range [37]. Finally, the estimated power was found by solving .
4. Simulation Results
4.1. Evaluation of Spatial 2D Interpolation for the Complete Set of Measurements
4.2. Evaluation of Spatial 3D Interpolation for a Limited Set of Measurements
5. Discussion
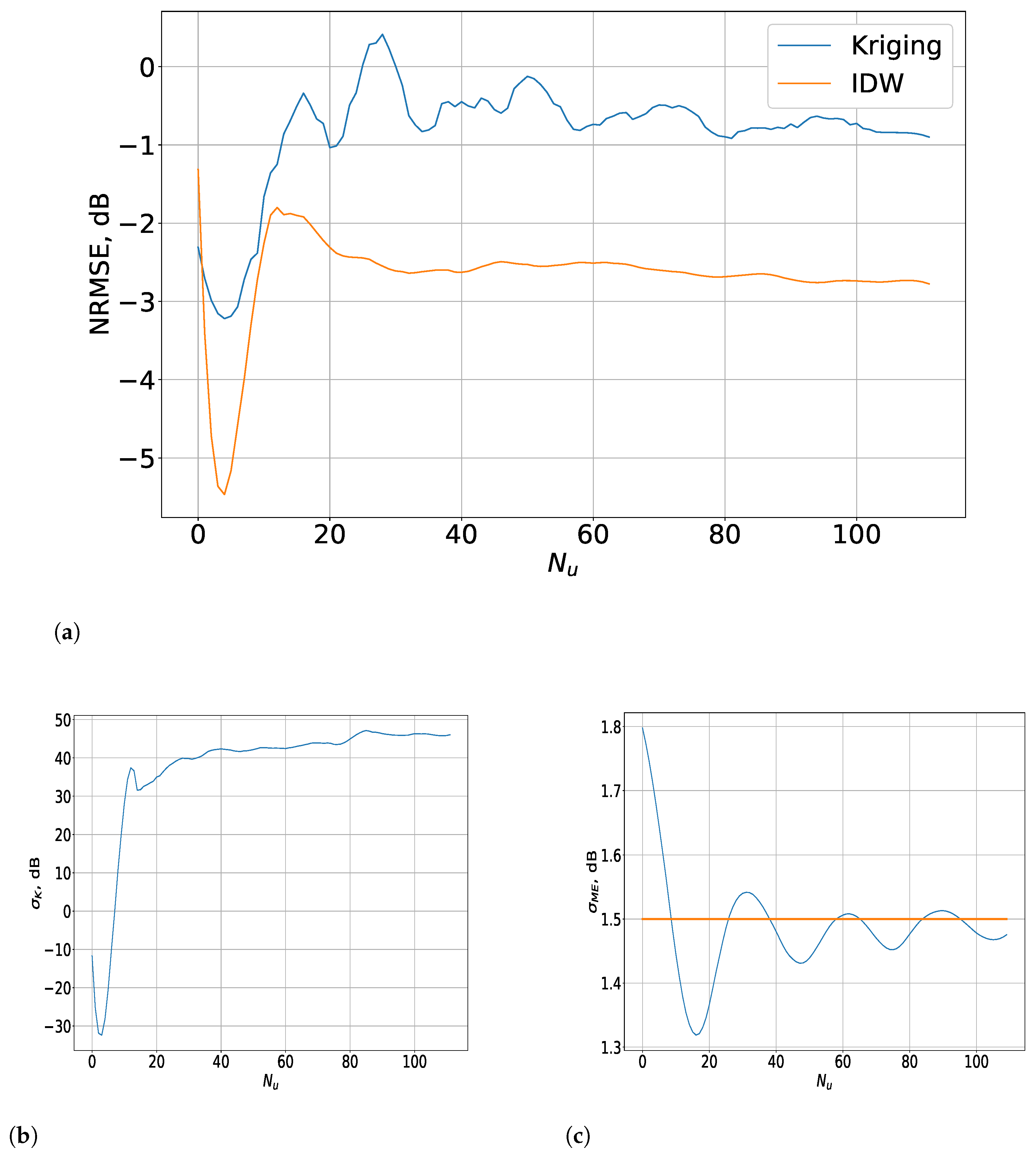
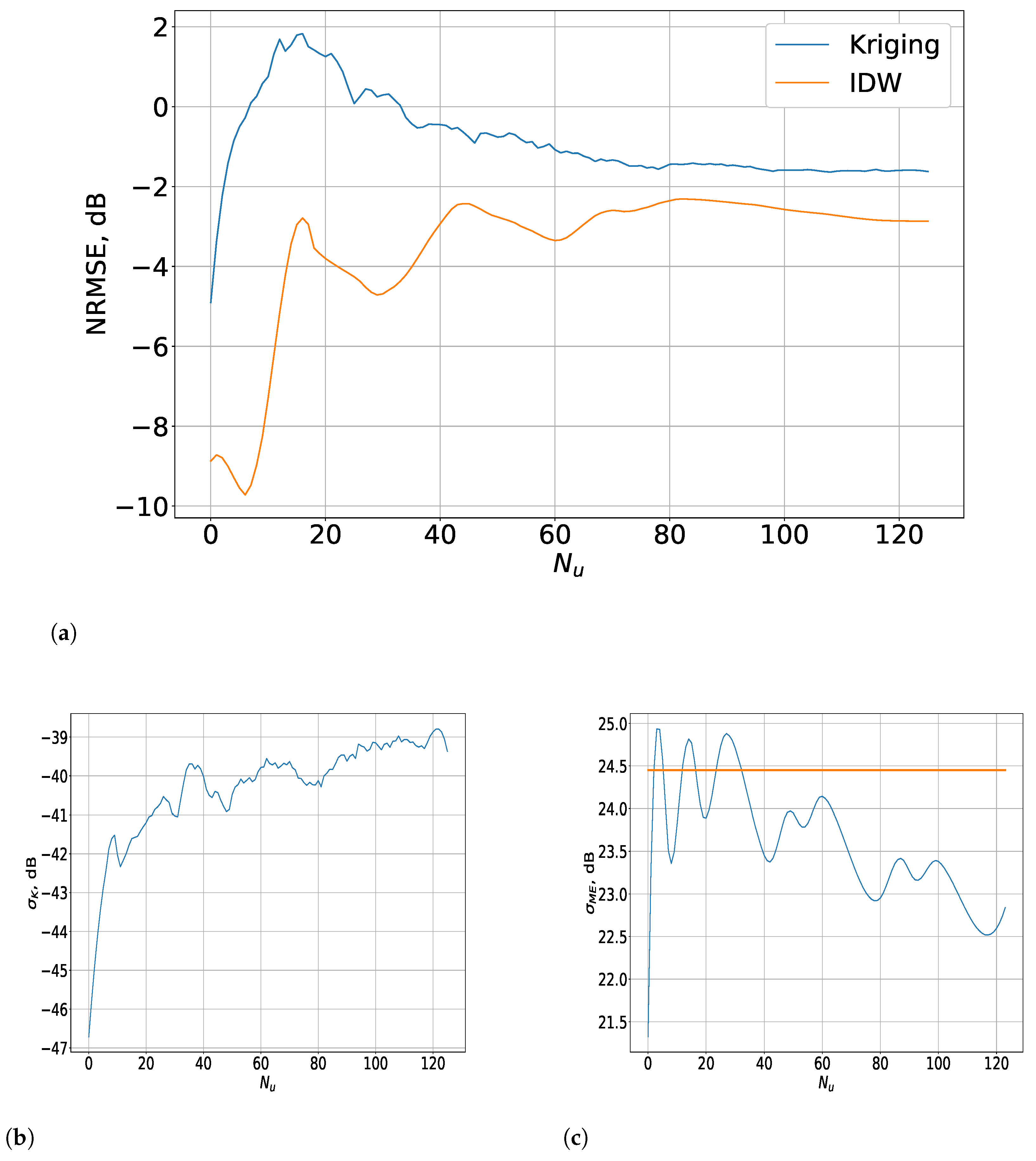
- Both the Kriging and IDW methods converged to an NRMSE below 0 dB, which makes them suitable for limited real-world 3D RF data, and the achieved accuracy was not significantly lower than in the case where the complete set of measurements was available (shown in the previous work [23]). In comparison, the NRMSE was roughly the same for the indoor scenario, or about 4 dB higher for the outdoor scenario. As observed in Figure 8 and Figure 9, more-consistent accuracy was attained in the outdoor scenario where the RoIs can be more appropriately defined. That was due to the clear distinction between the clusters of measurements with small variation (below 0.5 dB) between every two consecutive points and those that differed noticeably (i.e., which constituted the RoIs). Stable convergence was achieved at an NRMSE of −2.8 dB for in both scenarios. As indicated by the significant change in the STD, the Kriging method yielded much-less-stable results if a random subset of points (in the indoor scenario) was used for the interpolation. In general, the STD of the distance between the measured and the estimated points had a notable influence on the performance of both methods.Relevant challenge: To increase the interpolation efficiency for REM construction, precise mechanisms for RoI determination should be developed, such that the characteristics of the environment are considered. The two scenarios for which the interpolation was evaluated were characterised either by fast-changing (difference of below 0.5 dB between every two measurements) received signal power throughout the entire measurement volume (indoor scenario) or by the notably slower rate of change for most of the measurements (outdoor scenario). The RF data for the former scenario were influenced by the experimental setup of a slow-moving receiver in an indoor environment (within a volume of 6 × 2 × 0.75 m), which included severe multipath propagation, thus requiring an even higher resolution of the measurements [23]. On the other hand, the outdoor scenario comprised a much-more-spacious area (105 × 38 m) at each height, and thus, the distance between each two points, although constant, was significantly greater than for the alternative. The points were adequately dispersed in space and sufficient in number, such that, for most values of , was below the average, thus emphasising the importance of the appropriate selection of (even a small subset of) samples for the RoI, while the rest can be reliably estimated. This can be achieved by adaptive mechanisms for upsampling-based interpolation [12], sensing location estimation through orthogonal matching pursuit [15], autoencoder-based tensor completion [16,39], and statistical approximation of the signal propagation [10] or of the LoS availability [40].
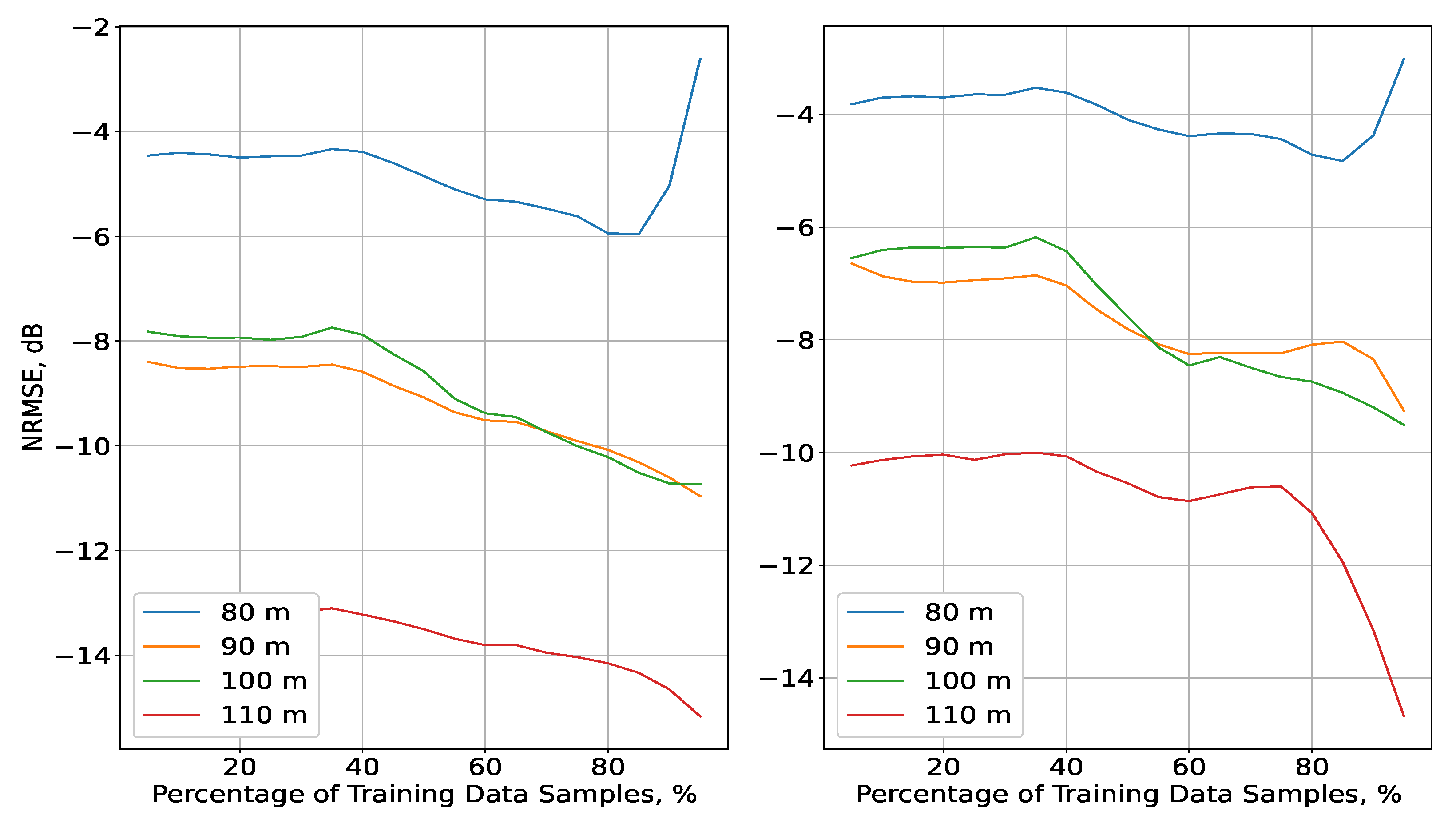
- As observed from the previous works [19,24], which introduced the experiments, the intensity of the received signal variations decreased with height, even though this phenomenon had much lesser influence in the indoor scenario, as the rate of change remained high for all planes. Following this, the NRMSE distributions (Figure 4 and Figure 6) for both interpolations reflected these observations as the results for different planes in the indoor scenario were very close to each other, while their accuracy was much lower. In contrast, the error for the four planes in the outdoor scenario was distributed in such a manner that there was a notable difference between the lowest and highest plane and the two planes between them. Figure 4 and Figure 6 show that the decline in the NRMSE was not necessarily consistent with the increase in height. For the indoor scenario, the NRMSE at 0.75 m was very close to those at 0.25 and 0.5 m. In contrast, the NRMSE in the outdoor scenario was 3–5 dB lower at the highest altitude (110 m) in comparison to the measurements at the planes of 90 and 100 m, which had a negligible difference from each other. The signal power fluctuations, therefore, affected the accuracy and the stability of its distributions for each plane, such that the lower the variations, the more consistent the NRMSE would remain with the increase of the percentage of training data .Relevant challenge: The environment in which the spatial 3D measurements are collected needs to be considered in the planning of the experimental setup and in the design of the interpolation and prediction methods. Measurement planes at low heights require more measurement samples (i.e., shorter distance between every two measurements), especially in an indoor environment. Therefore, an algorithm for multipath propagation prediction can be employed to identify the RoIs and optimise the measurement collection at multiple heights, while its results are validated through preliminary measurements on a single plane. The novel generative adversarial networks and convolutional and graph neural networks [20,21,41,42,43] are some appropriate solutions for that purpose, thus reducing the number of measurement points and increasing the accuracy. An advantage of these methods is that they can utilise existing simulated or real-world signal measurement datasets to predict the RoIs [18]. Such methods have mostly been used for 2D RF data on a single plane and will need to be adapted to account for the signal variations in 3D space [16,24].
- The adequacy of available RF datasets for REM construction should be evaluated depending on the scenario for which the interpolation is to be performed. There are several types of datasets that have been commonly utilised in recent literature—mobile networks in various outdoor areas [16,43], UAV-based sensing and coverage provision [24,40], and simulated and real-world indoor data for stationary receivers [18,21,39]. To the best of the authors’ knowledge, the efficiency of these datasets for REM estimation in various environments and scenarios, different than the ones within the scope of their individual papers, has not been established.Relevant challenge: In order for more-accurate and -adaptable interpolation methods to be developed, there is a need for: (1) the generation of sufficiently large datasets for each relevant scenario; and (2) the study of the current datasets’ adequacy for training in more challenging scenarios with multiple transmitter and receiver types. Both of these aspects are relevant to the field of spectrum occupancy characterisation through REM and spectrum sensing, but each has its own challenges. The generation of datasets in complex scenarios may often be very difficult and/or expensive, especially if the experimental setup includes multiple UAVs. On the other hand, the usage of publicly available datasets necessitates the further analysis of their features (such as how the signal varies in time or space), which is to be considered in the design of REM prediction and interpolation algorithms, and in the interpretability of their results, which is of great interest for resource allocation and network planning.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| 2D | Two-dimensional |
| 3D | Three-dimensional |
| APS | Automated positioning system |
| CR | Cognitive radio |
| DL | Deep learning |
| EUD | End user device |
| HC2WA | Human-centric cognitive wireless access |
| IDW | Inverse distance weighting |
| IoT | Internet of Things |
| MC | Monte Carlo |
| NRMSE | Normalised root-mean-squared error |
| OFDM | Orthogonal frequency division multiplexing |
| PH | Positioning head |
| RAM | Random access memory |
| RC | Remote controller |
| REM | Radio environment map |
| RF | Radio frequency |
| RSE | Root-squared error |
| SAC | Spectrum access control |
| SDR | Software-defined radio |
| SNR | Signal-to-noise ratio |
| SSD | Solid-state drive |
| STD | Standard deviation |
| TX | Transmitter |
| UAV | Unmanned aerial vehicle |
| V2X | Vehicle-to-everything |
References
- Tataria, H.; Shafi, M.; Molisch, A.F.; Dohler, M.; Sjöland, H.; Tufvesson, F. 6G wireless systems: Vision, requirements, challenges, insights, and opportunities. Proc. IEEE 2021, 109, 1166–1199. [Google Scholar] [CrossRef]
- Wang, C.X.; You, X.; Gao, X.; Zhu, X.; Li, Z.; Zhang, C.; Wang, H.; Huang, Y.; Chen, Y.; Haas, H.; et al. On the road to 6G: Visions, requirements, key technologies and testbeds. IEEE Commun. Surv. Tutor. 2023, 25, 905–974. [Google Scholar] [CrossRef]
- Dao, N.N.; Pham, Q.V.; Tu, N.H.; Thanh, T.T.; Bao, V.N.Q.; Lakew, D.S.; Cho, S. Survey on aerial radio access networks: Toward a comprehensive 6G access infrastructure. IEEE Commun. Surv. Tutor. 2021, 23, 1193–1225. [Google Scholar] [CrossRef]
- Saad, W.; Bennis, M.; Chen, M. A vision of 6G wireless systems: Applications, trends, technologies, and open research problems. IEEE Netw. 2019, 34, 134–142. [Google Scholar] [CrossRef]
- Shahzadi, R.; Ali, M.; Khan, H.Z.; Naeem, M. UAV assisted 5G and beyond wireless networks: A survey. J. Netw. Comput. Appl. 2021, 189, 103114. [Google Scholar] [CrossRef]
- Yilmaz, H.B.; Tugcu, T.; Alagöz, F.; Bayhan, S. Radio environment map as enabler for practical cognitive radio networks. IEEE Commun. Mag. 2013, 51, 162–169. [Google Scholar] [CrossRef]
- Gavrilovska, L.; Van De Beek, J.; Xie, Y.; Lidström, E.; Riihijärvi, J.; Mähönen, P.; Atanasovski, V.; Denkovski, D.; Rakovic, V. Enabling LTE in TVWS with radio environment maps: From an architecture design towards a system level prototype. Comput. Commun. 2014, 53, 62–72. [Google Scholar] [CrossRef]
- Noor-A-Rahim, M.; Liu, Z.; Lee, H.; Khyam, M.O.; He, J.; Pesch, D.; Moessner, K.; Saad, W.; Poor, H.V. 6G for vehicle-to-everything (V2X) communications: Enabling technologies, challenges, and opportunities. Proc. IEEE 2022, 110, 712–734. [Google Scholar] [CrossRef]
- Reddy, Y.S.; Kumar, A.; Pandey, O.J.; Cenkeramaddi, L.R. Spectrum cartography techniques, challenges, opportunities, and applications: A survey. Pervasive Mob. Comput. 2022, 79, 101511. [Google Scholar] [CrossRef]
- Wei, Z.; Yao, R.; Kang, J.; Chen, X.; Wu, H. Three-Dimensional Spectrum Occupancy Measurement using UAV: Performance Analysis and Algorithm Design. IEEE Sens. J. 2022, 22, 9146–9157. [Google Scholar] [CrossRef]
- Ivanov, A.; Tonchev, K.; Poulkov, V.; Manolova, A. Probabilistic Spectrum Sensing Based on Feature Detection for 6G Cognitive Radio: A Survey. IEEE Access 2021, 9, 116994–117026. [Google Scholar] [CrossRef]
- Wu, Q.; Shen, F.; Wang, Z.; Ding, G. 3D spectrum mapping based on ROI-driven UAV deployment. IEEE Netw. 2020, 34, 24–31. [Google Scholar] [CrossRef]
- Du, X.; Zhu, Q.; Ding, G.; Li, J.; Wu, Q.; Lan, T.; Lin, Z.; Zhong, W.; Han, L. UAV-Assisted Three-Dimensional Spectrum Mapping Driven by Spectrum Data and Channel Model. Symmetry 2021, 13, 2308. [Google Scholar] [CrossRef]
- Shen, F.; Ding, G.; Wu, Q. Efficient Remote Compressed Spectrum Mapping in 3D Spectrum-heterogeneous Environment with Inaccessible Areas. IEEE Wirel. Commun. Lett. 2022, 11, 1488–1492. [Google Scholar] [CrossRef]
- Shen, F.; Wang, Z.; Ding, G.; Li, K.; Wu, Q. 3D Compressed Spectrum Mapping with Sampling Locations Optimization in Spectrum-Heterogeneous Environment. IEEE Trans. Wirel. Commun. 2021, 21, 326–338. [Google Scholar] [CrossRef]
- Teganya, Y.; Romero, D. Deep completion autoencoders for radio map estimation. IEEE Trans. Wirel. Commun. 2021, 21, 1710–1724. [Google Scholar] [CrossRef]
- Shrestha, R.; Romero, D.; Chepuri, S.P. Spectrum Surveying: Active Radio Map Estimation with Autonomous UAVs. arXiv 2022, arXiv:2201.04125. [Google Scholar] [CrossRef]
- Chaves-Villota, A.; Viteri-Mera, C.A. DeepREM: Deep-Learning-Based Radio Environment Map Estimation from Sparse Measurements. IEEE Access 2023, 11, 48697–48714. [Google Scholar] [CrossRef]
- Ivanov, A.; Stoynov, V.; Petkova, R.; Tonchev, K.; Manolova, A.; Poulkov, V. Interference and spatial throughput characterization through practical 3d mapping in dense indoor iot scenarios. In Proceedings of the 2020 23rd International Symposium on Wireless Personal Multimedia Communications (WPMC), Okayama, Japan, 19–26 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Cisse, C.T.; Baala, O.; Guillet, V.; Spies, F.; Caminada, A. IRGAN: CGAN-based Indoor Radio Map Prediction. In Proceedings of the 2023 IFIP Networking Conference (IFIP Networking), Barcelona, Spain, 12–15 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–9. [Google Scholar]
- Tonchev, K.; Ivanov, A.; Neshov, N.; Manolova, A.; Poulkov, V. Learning Graph Convolutional Neural Networks to Predict Radio Environment Maps. In Proceedings of the 2022 25th International Symposium on Wireless Personal Multimedia Communications (WPMC), Herning, Denmark, 30 October–2 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 392–395. [Google Scholar]
- Rufaida, S.I.; Leu, J.S.; Su, K.W.; Haniz, A.; Takada, J.I. Construction of an indoor radio environment map using gradient boosting decision tree. Wirel. Netw. 2020, 26, 6215–6236. [Google Scholar] [CrossRef]
- Ivanov, A.; Tonchev, K.; Poulkov, V.; Manolova, A.; Vlahov, A. Interpolation Accuracy Evaluation for 3D Radio Environment Maps Construction. In Proceedings of the 26th International Symposium on Wireless Personal Multimedia Communications (WPMC), Tampa, FL, USA, 19–22 November 2023. [Google Scholar]
- Ivanov, A.; Muhammad, B.; Tonchev, K.; Mihovska, A.; Poulkov, V. UAV-Based Volumetric Measurements toward Radio Environment Map Construction and Analysis. Sensors 2022, 22, 9705. [Google Scholar] [CrossRef]
- Höyhtyä, M.; Mämmelä, A.; Eskola, M.; Matinmikko, M.; Kalliovaara, J.; Ojaniemi, J.; Suutala, J.; Ekman, R.; Bacchus, R.; Roberson, D. Spectrum occupancy measurements: A survey and use of interference maps. IEEE Commun. Surv. Tutor. 2016, 18, 2386–2414. [Google Scholar] [CrossRef]
- Platzgummer, V.; Raida, V.; Krainz, G.; Svoboda, P.; Lerch, M.; Rupp, M. UAV-based coverage measurement method for 5G. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Semkin, V.; Kang, S.; Haarla, J.; Xia, W.; Huhtinen, I.; Geraci, G.; Lozano, A.; Loianno, G.; Mezzavilla, M.; Rangan, S. Lightweight UAV-based measurement system for air-to-ground channels at 28 GHz. In Proceedings of the 2021 IEEE 32nd Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Helsinki, Finland, 13–16 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 848–853. [Google Scholar]
- Zeng, Y.; Xu, X.; Jin, S.; Zhang, R. Simultaneous navigation and radio mapping for cellular-connected UAV with deep reinforcement learning. IEEE Trans. Wirel. Commun. 2021, 20, 4205–4220. [Google Scholar] [CrossRef]
- Pyo, C.W.; Sawada, H.; Matsumura, T. RadioResUNet: Wireless Measurement by Deep Learning for Indoor Environments. In Proceedings of the 2022 25th International Symposium on Wireless Personal Multimedia Communications (WPMC), Herning, Denmark, 30 October–2 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 104–109. [Google Scholar]
- Maiti, P.; Mitra, D. Ordinary kriging interpolation for indoor 3D REM. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 13285–13299. [Google Scholar] [CrossRef]
- Horsmanheimo, S.; Tuomimäki, L.; Semkin, V.; Mehnert, S.; Chen, T.; Ojennus, M.; Nykänen, L. 5G communication QoS measurements for smart city UAV services. In Proceedings of the 2022 16th European Conference on Antennas and Propagation (EuCAP), Madrid, Spain, 27 March–1 April 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1–5. [Google Scholar]
- Analog Devices, Inc. ADALM-PLUTO. Available online: https://www.analog.com/en/design-center/evaluation-hardware-and-software/evaluation-boards-kits/adalm-pluto.html (accessed on 21 August 2023).
- Nuand. bladeRF 2.0 Micro. Available online: https://www.nuand.com/bladerf-2-0-micro/ (accessed on 21 August 2023).
- Tian, F.; Li, H.; Yuan, L. Design and implementation of AD9361-based software radio receiver. EURASIP J. Wirel. Commun. Netw. 2019, 2019, 95. [Google Scholar] [CrossRef]
- heliguy™ Blog. DJI Transmission Systems: Wi-Fi, OcuSync, Lightbridge. Available online: https://www.heliguy.com/blogs/posts/dji-transmission-systems-wi-fi-ocusync-lightbridge (accessed on 13 October 2023).
- Kaniewski, P.; Romanik, J.; Golan, E.; Zubel, K. Spectrum awareness for cognitive radios supported by radio environment maps: Zonal approach. Appl. Sci. 2021, 11, 2910. [Google Scholar] [CrossRef]
- Davis, J.C.; Sampson, R.J. Statistics and Data Analysis in Geology; Wiley: New York, NY, USA, 1986; Volume 646. [Google Scholar]
- Lichtenstern, A. Kriging Methods in Spatial Statistics. Ph.D. Thesis, Technische Universität München, München, Germany, 2013. [Google Scholar]
- Shrestha, S.; Fu, X.; Hong, M. Deep spectrum cartography: Completing radio map tensors using learned neural models. IEEE Trans. Signal Process. 2022, 70, 1170–1184. [Google Scholar] [CrossRef]
- Gesbert, D.; Esrafilian, O.; Chen, J.; Gangula, R.; Mitra, U. UAV-aided RF Mapping for Sensing and Connectivity in Wireless Networks. IEEE Wirel. Commun. 2022, 30, 116–122. [Google Scholar] [CrossRef]
- Chen, G.; Liu, Y.; Zhang, T.; Zhang, J.; Guo, X.; Yang, J. A Graph Neural Network based Radio Map Construction Method for Urban Environment. IEEE Commun. Lett. 2023, 27, 1327–1331. [Google Scholar] [CrossRef]
- Mallik, M.; Tesfay, A.A.; Allaert, B.; Kassi, R.; Egea-Lopez, E.; Molina-Garcia-Pardo, J.M.; Wiart, J.; Gaillot, D.P.; Clavier, L. Towards Outdoor Electromagnetic Field Exposure Mapping Generation Using Conditional GANs. Sensors 2022, 22, 9643. [Google Scholar] [CrossRef]
- Tan, Z.; Xiao, L.; Tang, X.; Zhao, M.; Li, Y. A FL-Based Radio Map Reconstruction Approach for UAV-Aided Wireless Networks. Electronics 2023, 12, 2817. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference, Year | Interpolation Method and Research Topic | Scenario | Interpolation Performance | Notes |
|---|---|---|---|---|
| [10], 2022 | Statistical geometric modelling for UAV path optimisation | Simulated 3D data; multiple stationary TX sources | Relative error of −10 dB at a sampling ratio of 14% | Wireless coverage mapping |
| [12], 2020 | IDW method; UAV path optimisation for the IoT | Simulated 3D data; multiple stationary TX sources | RSE of −8 dB at a sampling ratio of 25% | RoI-based optimisation |
| [13], 2021 | Model-driven statistical signal inference from limited samples; UAV path optimisation | Simulated 3D data; single stationary TX source | Normalised RSE of −11 dB at a sampling ratio of 20% | - |
| [14], 2022 | Alternating direction method of multipliers method; UAV path optimisation | Simulated 3D data; multiple stationary TX sources | RSE of −5 dB at a sampling ratio of 30% | - |
| [15], 2021 | Orthogonal matching pursuit optimisation; UAV path optimisation for IoT | Simulated 3D data; multiple stationary TX sources | RSE of −8 dB at a sampling ratio of 20% | Statistical modelling |
| [16], 2021 | Deep autoencoder for tensor completion; UAV path optimisation | Simulated 2D data; multiple stationary TX sources | RMSE of 5 dB at a sampling ratio of 10% | - |
| [17], 2022 | Deep autoencoder combined with a Bayesian estimator; UAV path optimisation | Simulated 2D data; multiple stationary TX sources | RMSE of 4 dB at a sampling ratio of 6% | Data-distribution-driven algorithm design |
| [18], 2023 | Deep-CNN-based GAN for cellular coverage estimation in multiple environments | Simulated 2D data; multiple stationary TX sources | RMSE of 6 dB at a sampling ratio of 5% | Analysis of different distributions from which the test data were sampled |
| [21], 2022 | DL-based interpolation | Simulated 2D data; single stationary WiFi source | RMSE of 11.8 dB | Graph-neural-network-based method |
| [27], 2021 | Path loss and antenna pattern estimation; mmWave measurement system | Real-world 2D data; single stationary TX source | Not applicable | Custom-made UAV with RF measurement capability |
| [28], 2021 | UAV flight optimisation and coverage prediction | Simulated 2D data; Multiple stationary cellular BSs | MSE of −20 dB | Reinforcement learning |
| [30], 2019 | Kriging method; TV broadcast coverage mapping | Real-world 3D data; single stationary TX source | RMSE of 4.5 dB | - |
| [31], 2022 | Cellular coverage mapping and network performance assessment | Real-world 3D data; single stationary 5G BS | Not applicable | Custom-made UAV with RF measurement capability |
| This work | Kriging and IDW; indoor and outdoor measurements for spectrum occupancy characterisation | Real-world 3D data for outdoor UAV and indoor scenarios; multiple stationary and flying UAV TX sources | NRMSE of −9.5 dB at a sampling ratio of 21% | Analysis of the STD in 2D and 3D for data-driven interpolation |
| Parameter | Values |
|---|---|
| Dimensions of experimental volume, m | |
| B, MHz | 5 |
| , MHz | 2484 |
| , MHz | 10 |
| 35 | |
| Number of emitters/signal type | 4/WiFi |
| Transmission power, dBm | −3 |
| Parameter | Values |
|---|---|
| Dimensions of experimental volume, m | |
| B, MHz | 20 |
| , MHz | 2427 |
| , MHz | 40 |
| 40 | |
| Number of emitters/signal type | 3/proprietary variants of WiFi |
| Transmission power, dBm | ≤20 (Matrice 600 Pro), ≤26 (Inspire 2 and Mavic 2 Enterprise Dual) |
| Parameter | Values | Parameter | Value Range | |
|---|---|---|---|---|
| Indoor (APS) | Outdoor (UAV) | |||
| B, MHz | 5 | 20 | , % | |
| , MHz | 2484 | 2427 | ||
| 35 | 40 | |||
| 140 | 160 | |||
| 4 | 4 | 100 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanov, A.; Tonchev, K.; Poulkov, V.; Manolova, A.; Vlahov, A. Limited Sampling Spatial Interpolation Evaluation for 3D Radio Environment Mapping. Sensors 2023, 23, 9110. https://doi.org/10.3390/s23229110
Ivanov A, Tonchev K, Poulkov V, Manolova A, Vlahov A. Limited Sampling Spatial Interpolation Evaluation for 3D Radio Environment Mapping. Sensors. 2023; 23(22):9110. https://doi.org/10.3390/s23229110
Chicago/Turabian StyleIvanov, Antoni, Krasimir Tonchev, Vladimir Poulkov, Agata Manolova, and Atanas Vlahov. 2023. "Limited Sampling Spatial Interpolation Evaluation for 3D Radio Environment Mapping" Sensors 23, no. 22: 9110. https://doi.org/10.3390/s23229110