
Development and Validation of a Double-Sensor Hump Calibration Method for Articulated Vehicle Model Identification

Abstract
:1. Introduction
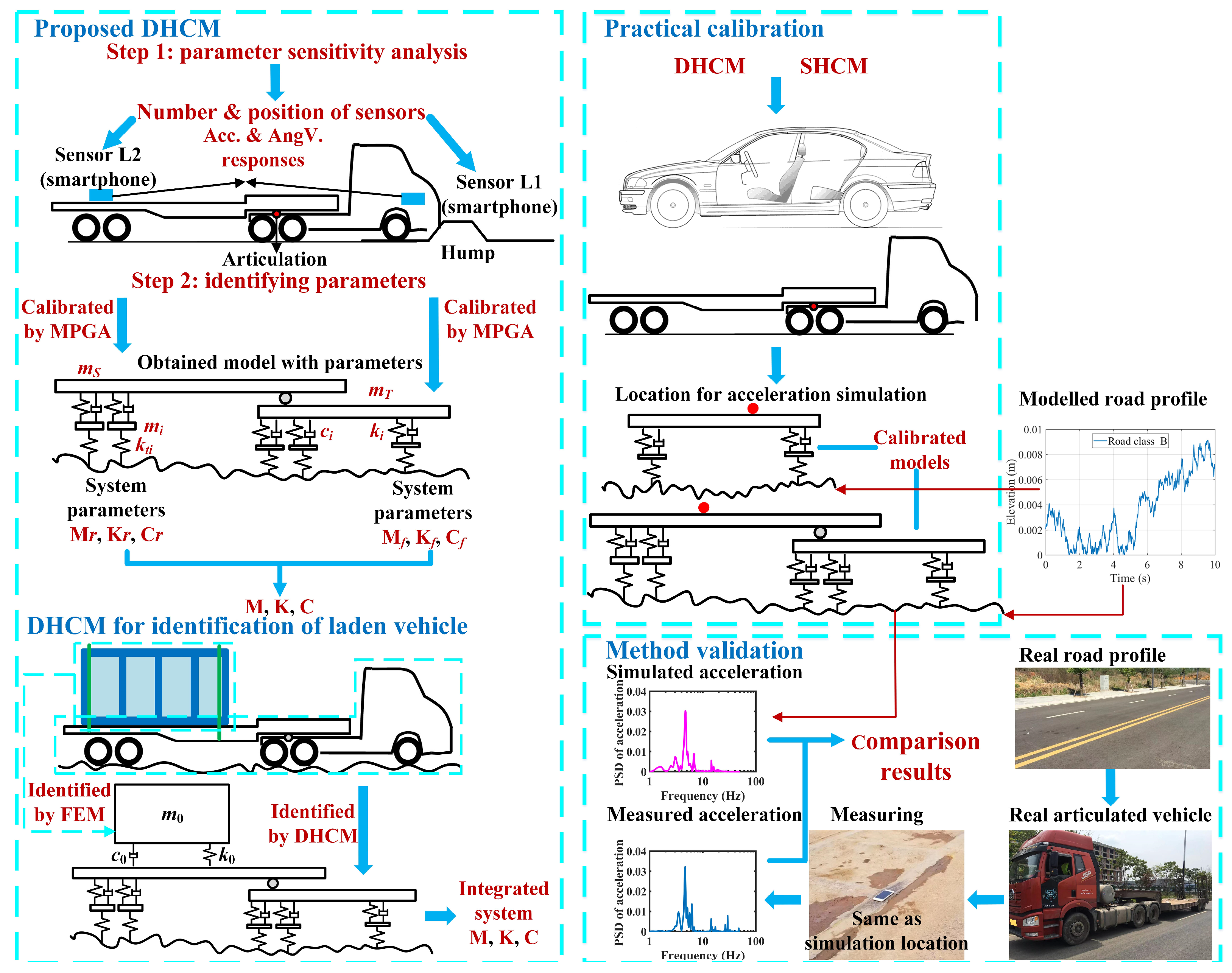
- A parameter sensitivity analysis of a tractor-semitrailer model was performed to optimize the number and position of smartphone sensors. The easily accessible sensor data combined with a multiple population genetic algorithm (MPGA) made the DHCM a low-cost yet effective method for calibrating unladen articulated vehicle models. In addition, the DHCM, supplemented by analytical methods and the finite element method (FEM), was being extended for the identification of laden articulated vehicle models.
- The proposed DHCM and the existing SHCM were employed to calibrate a 2-axle sedan and a 5-axle tractor-semitrailer models. This demonstrated the superiority of the DHCM over the SHCM regarding the calibration of articulated vehicle models.
- The vertical acceleration responses were simulated by substituting the road profiles into the equations of the calibrated models. The PSDs of the simulated accelerations were then compared with those of the measured accelerations to confirm the validity of the models calibrated with the DHCM.
2. DHCM for Articulated Vehicle Model Identification
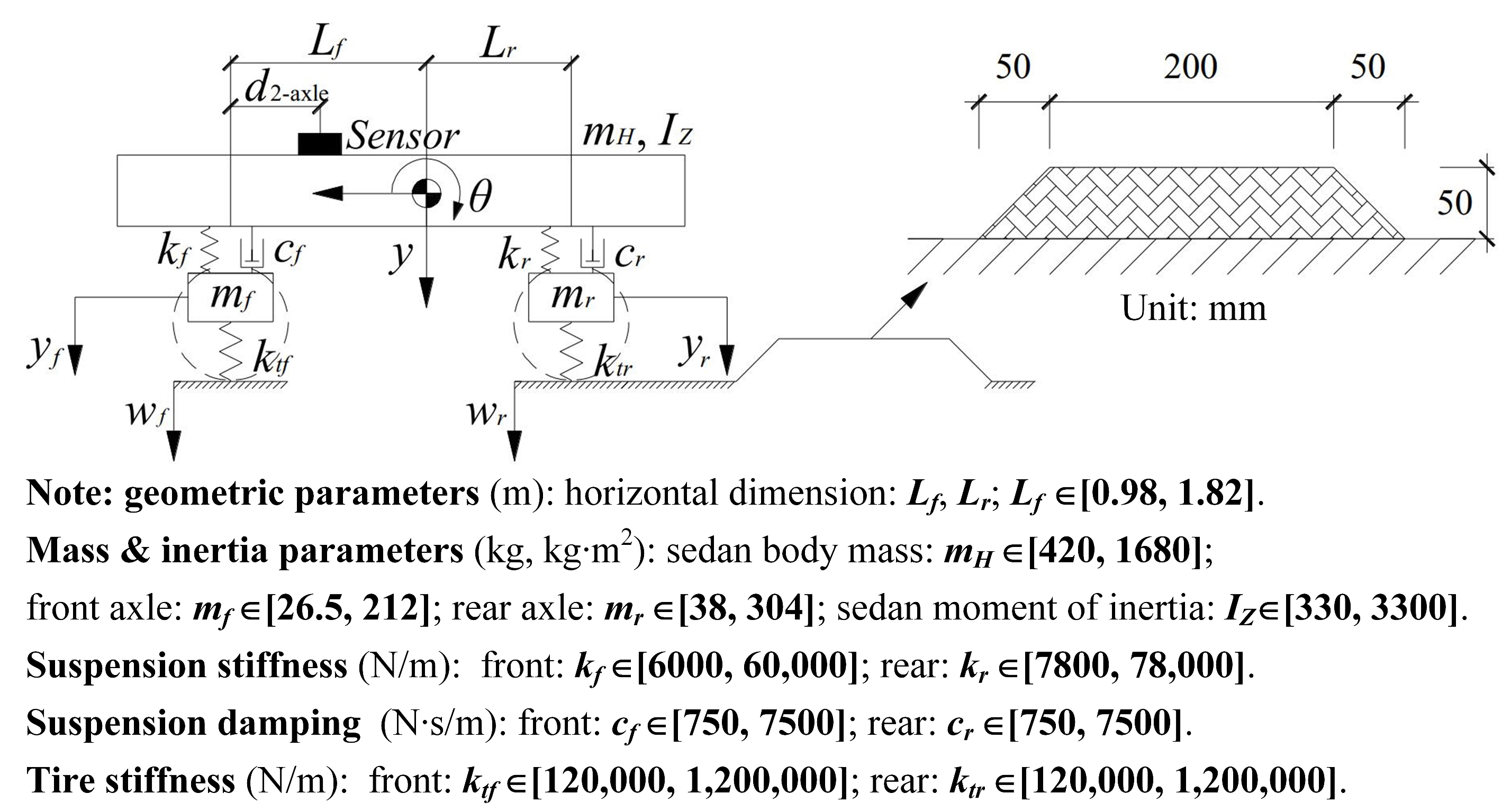
2.1. SHCM for 2-Axle Vehicle Model Identification
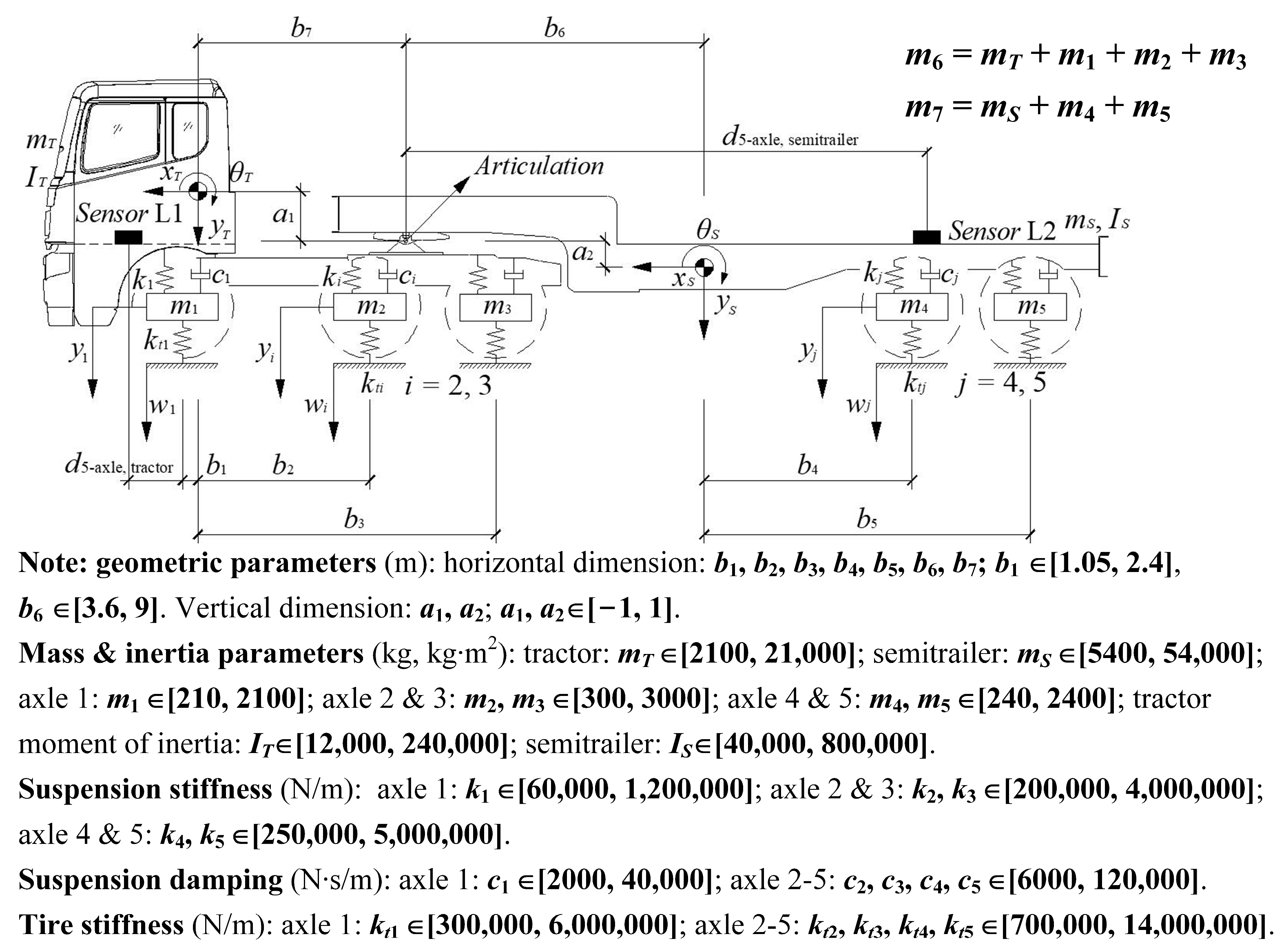
2.2. SHCM for Articulated Vehicle Model Identification
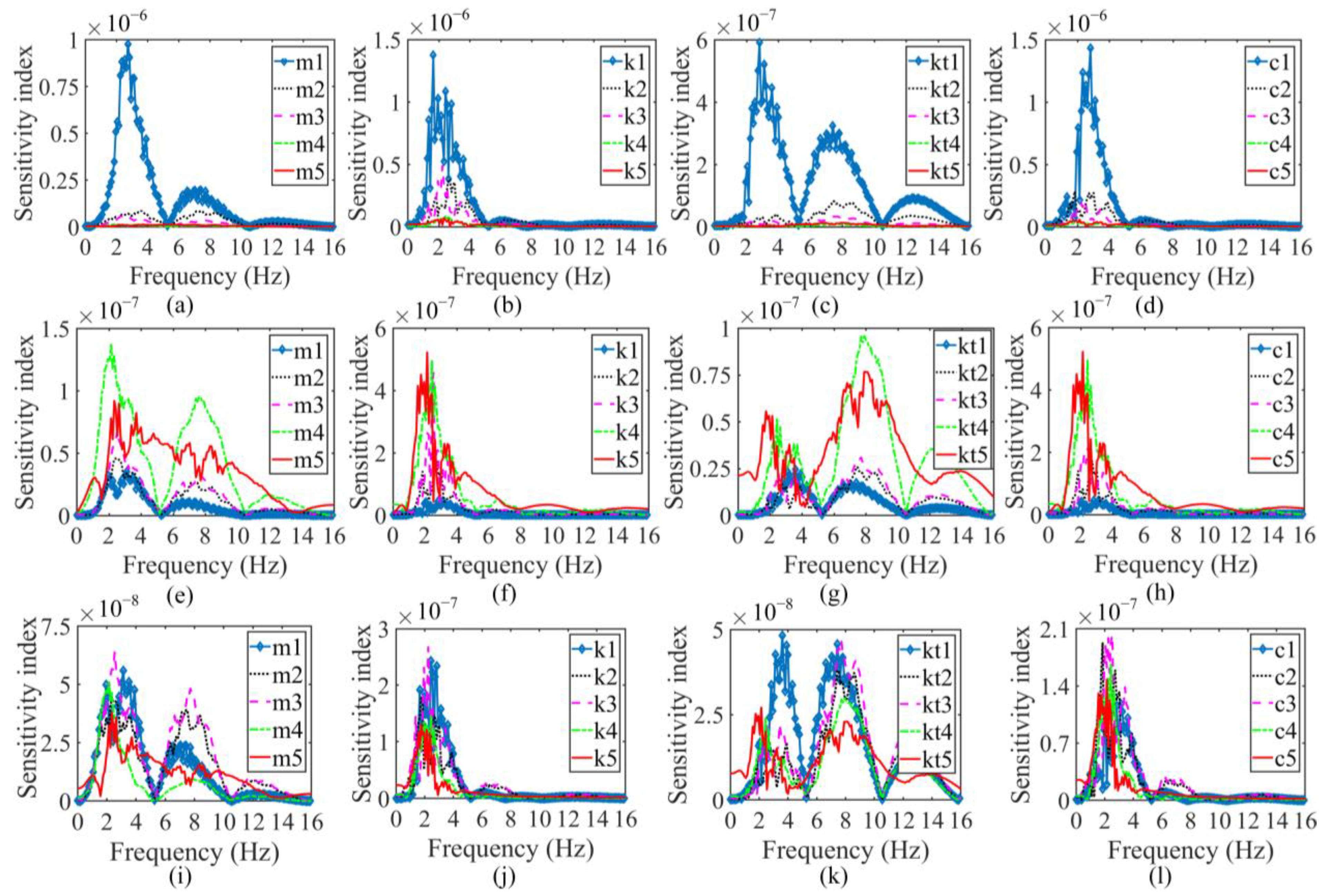
2.3. Parameter Sensitivity Analysis
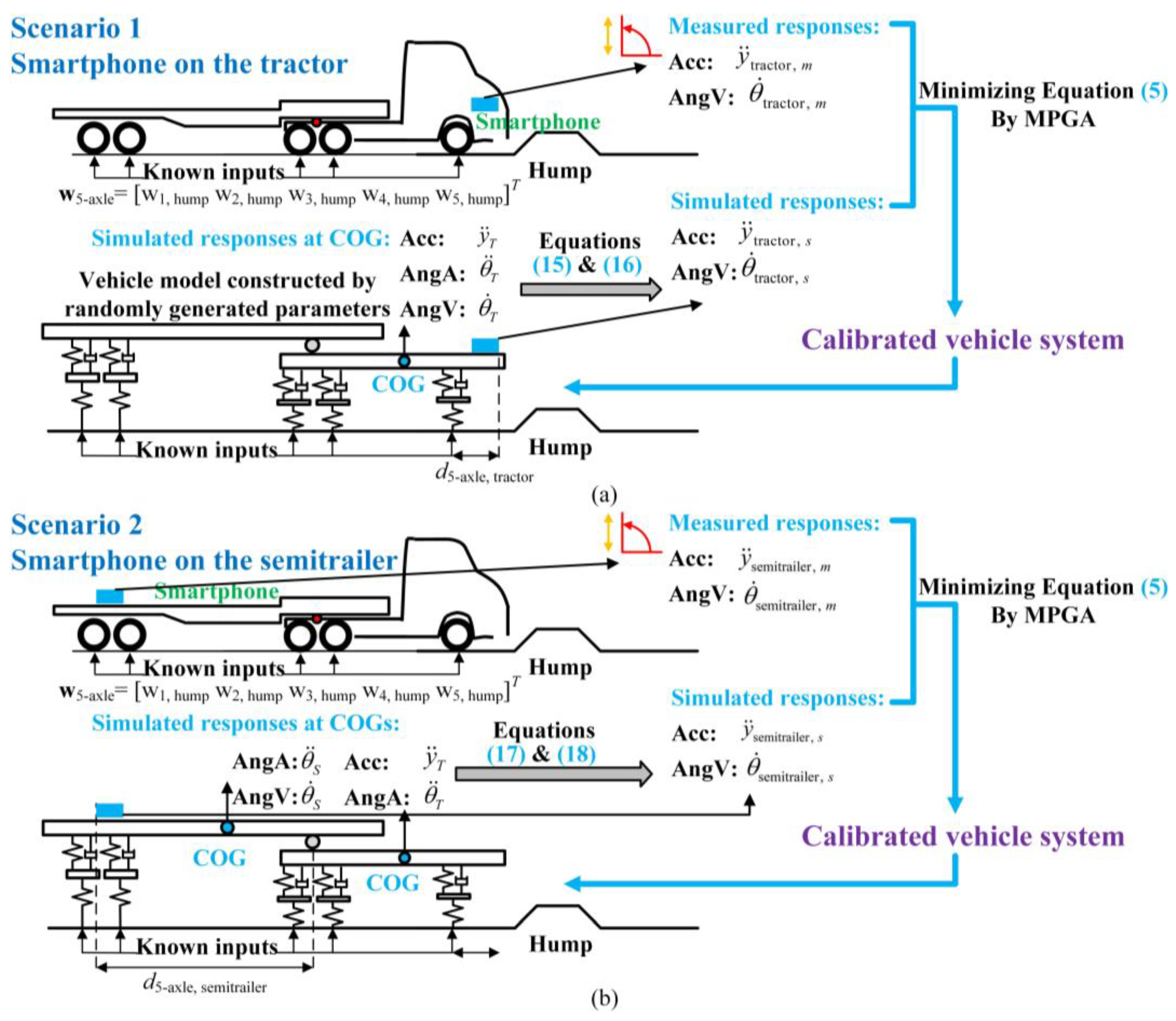
2.4. The Proposed DHCM
2.5. DHCM for Laden Vehicle Model Identification
3. Calibration Results
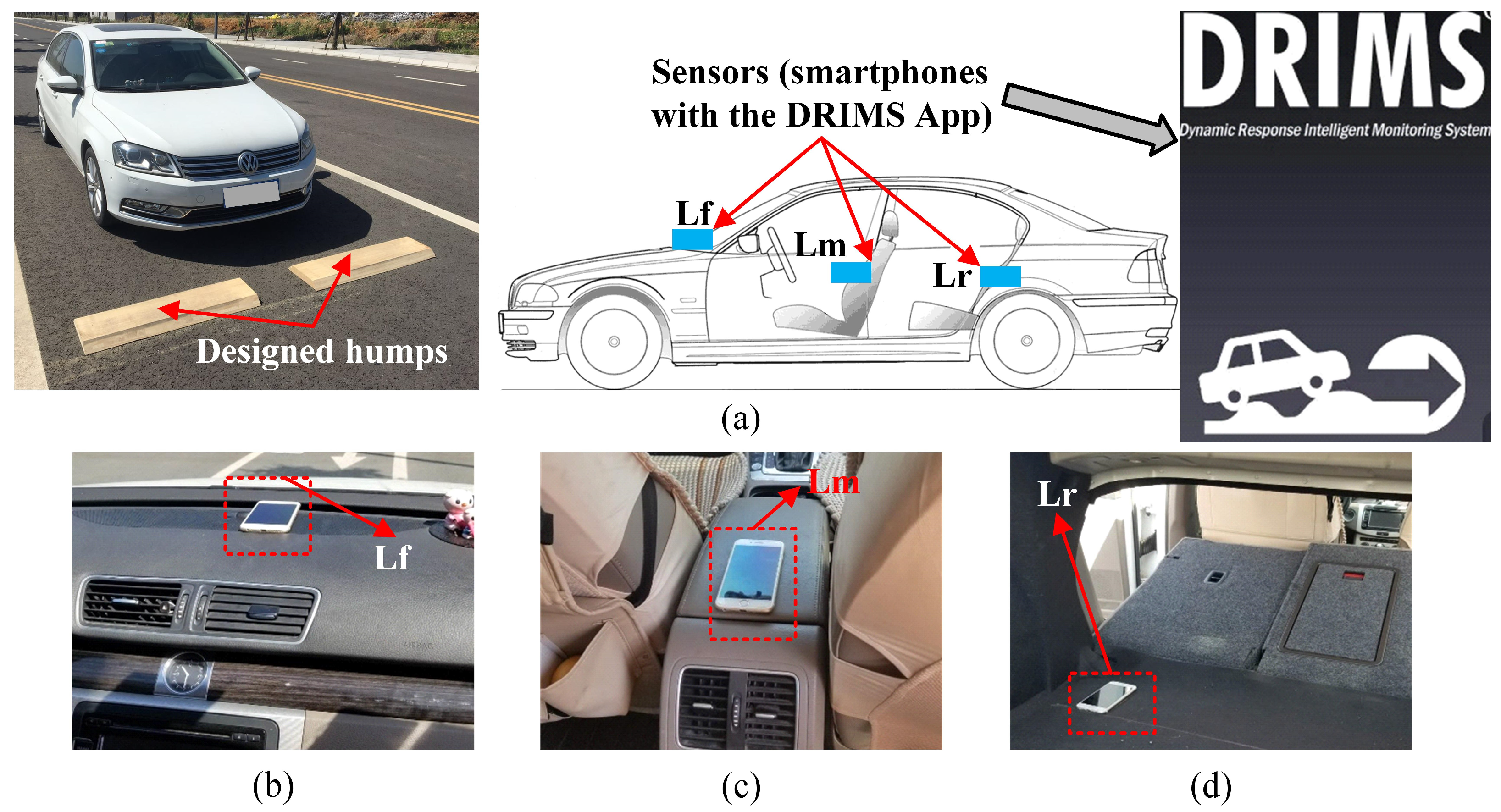
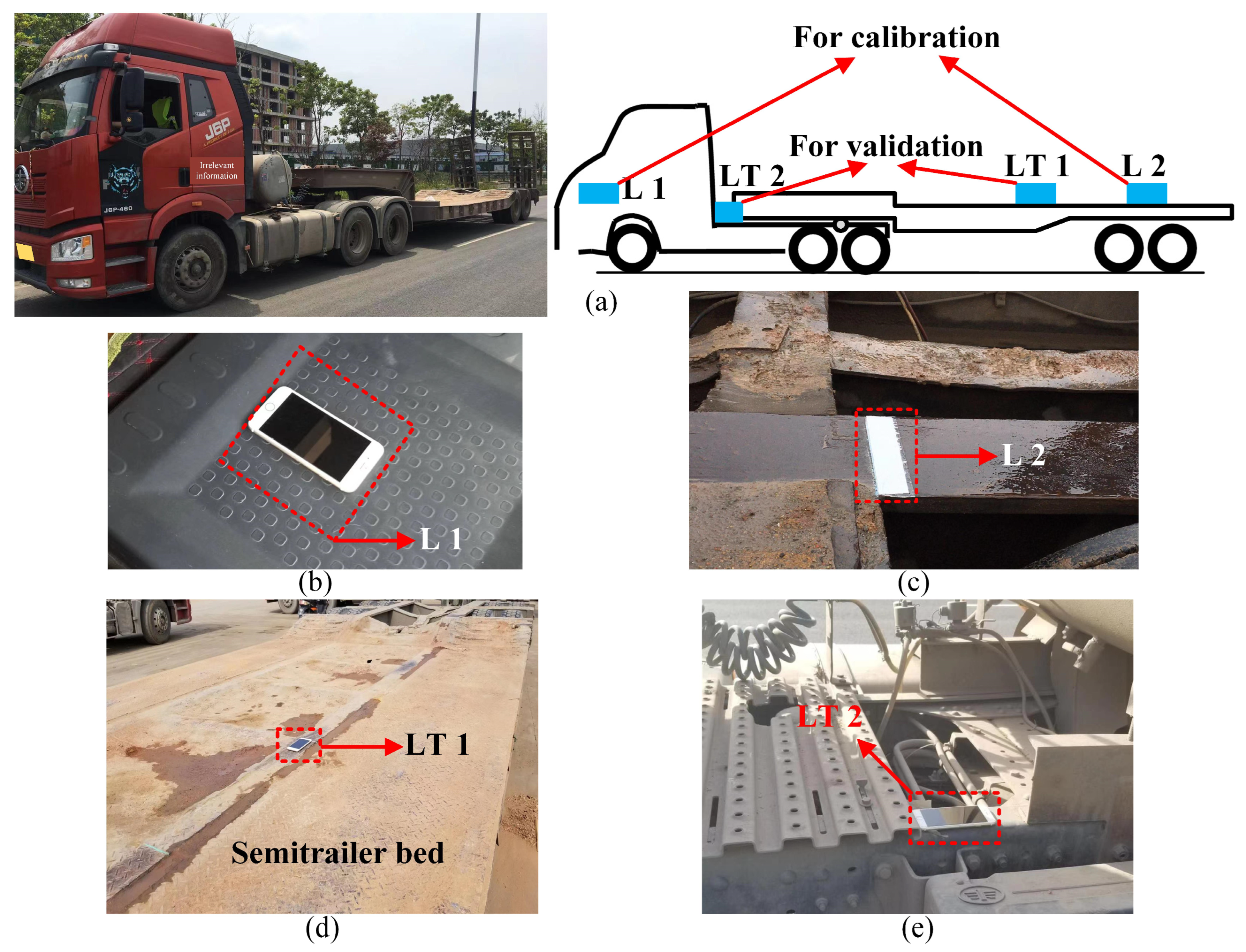
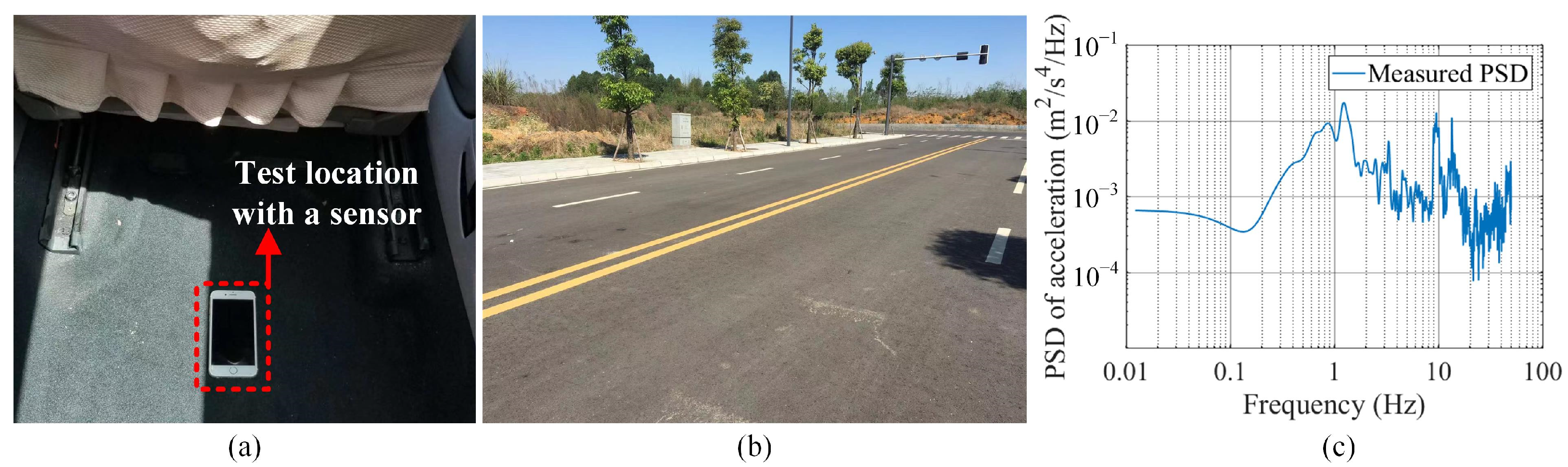
3.1. Instrumentation
3.2. Calibration of the 2-Axle Vehicle Model
3.3. Calibration of the Articulated Vehicle Model
3.4. Dynamic Characteristics of Calibrated Models
4. Validation Results
4.1. Principle of Acceleration Simulation
4.2. Comparison between PSDs of Measured and Simulated Acceleration
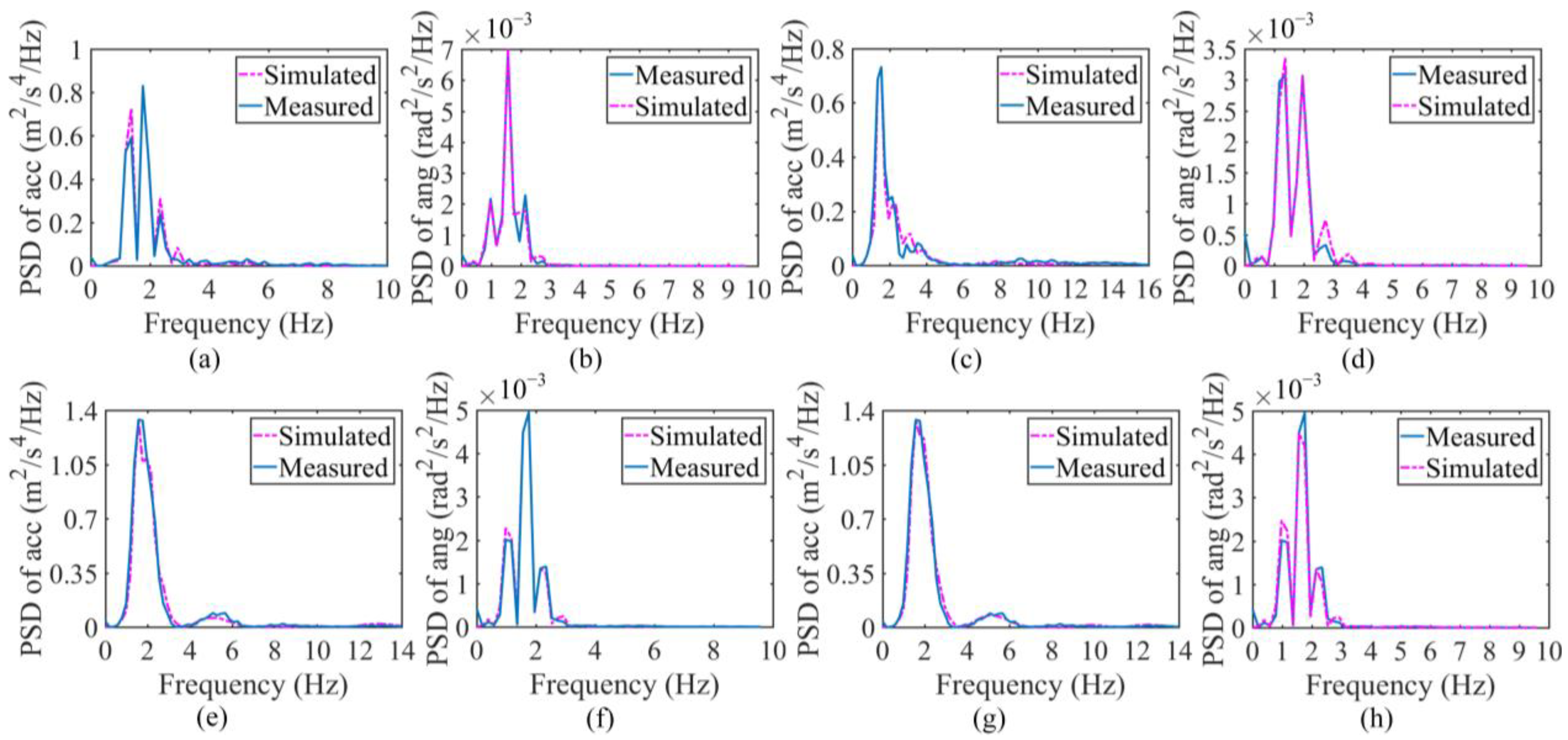
4.2.1. Measured Acceleration PSD for the 2-Axle Vehicle
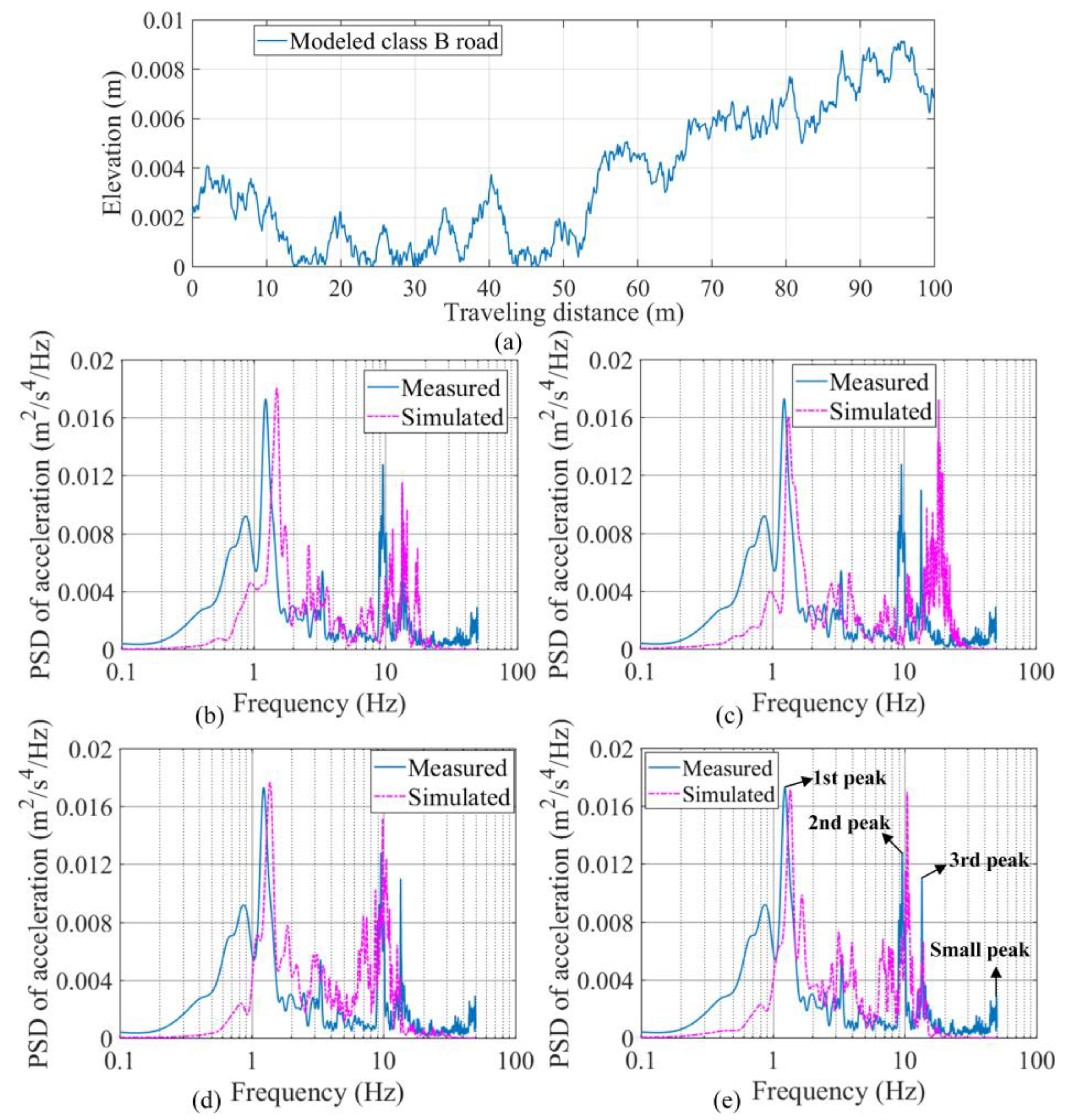
4.2.2. Comparison of PSDs for the 2-Axle Vehicle
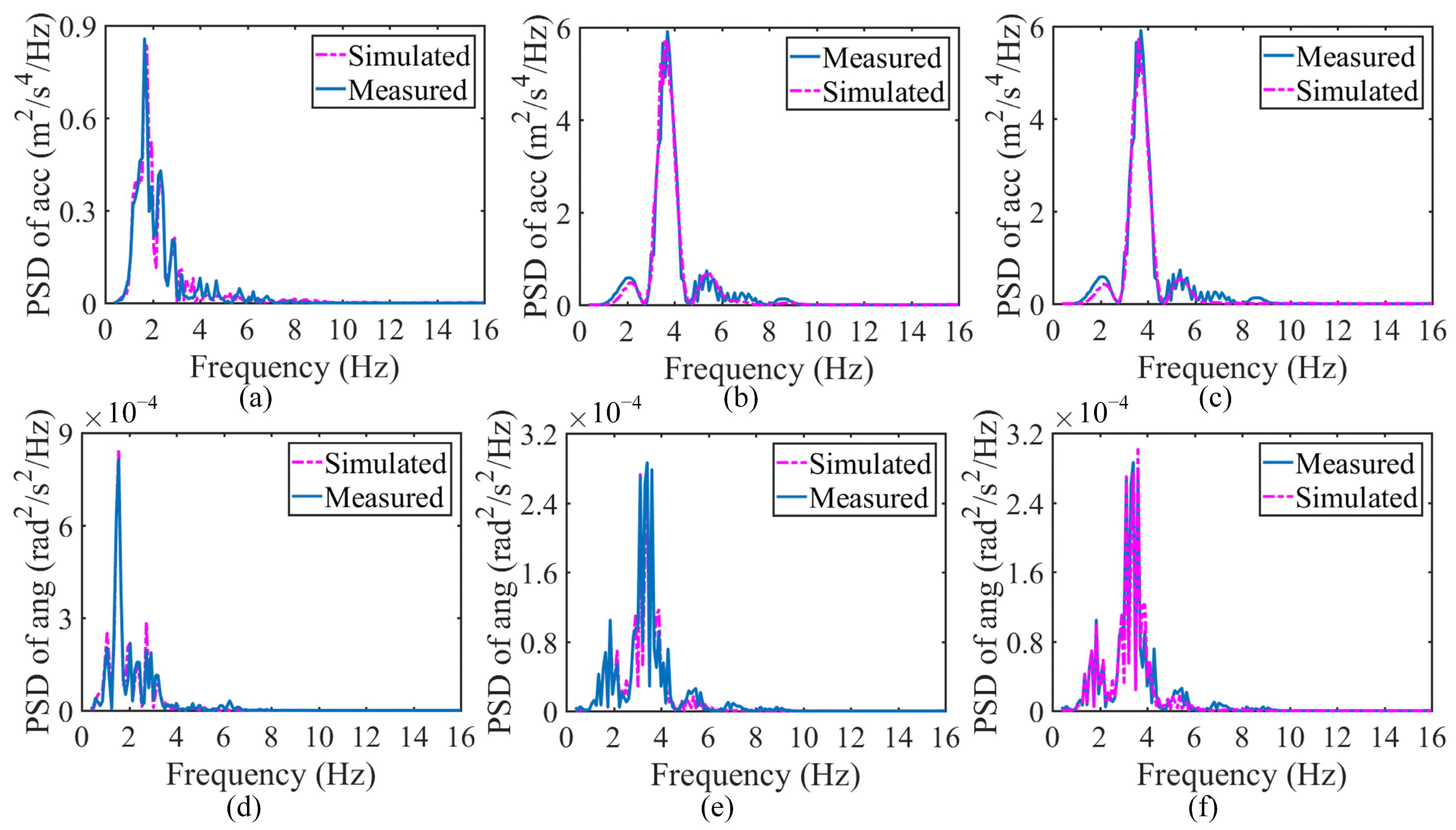
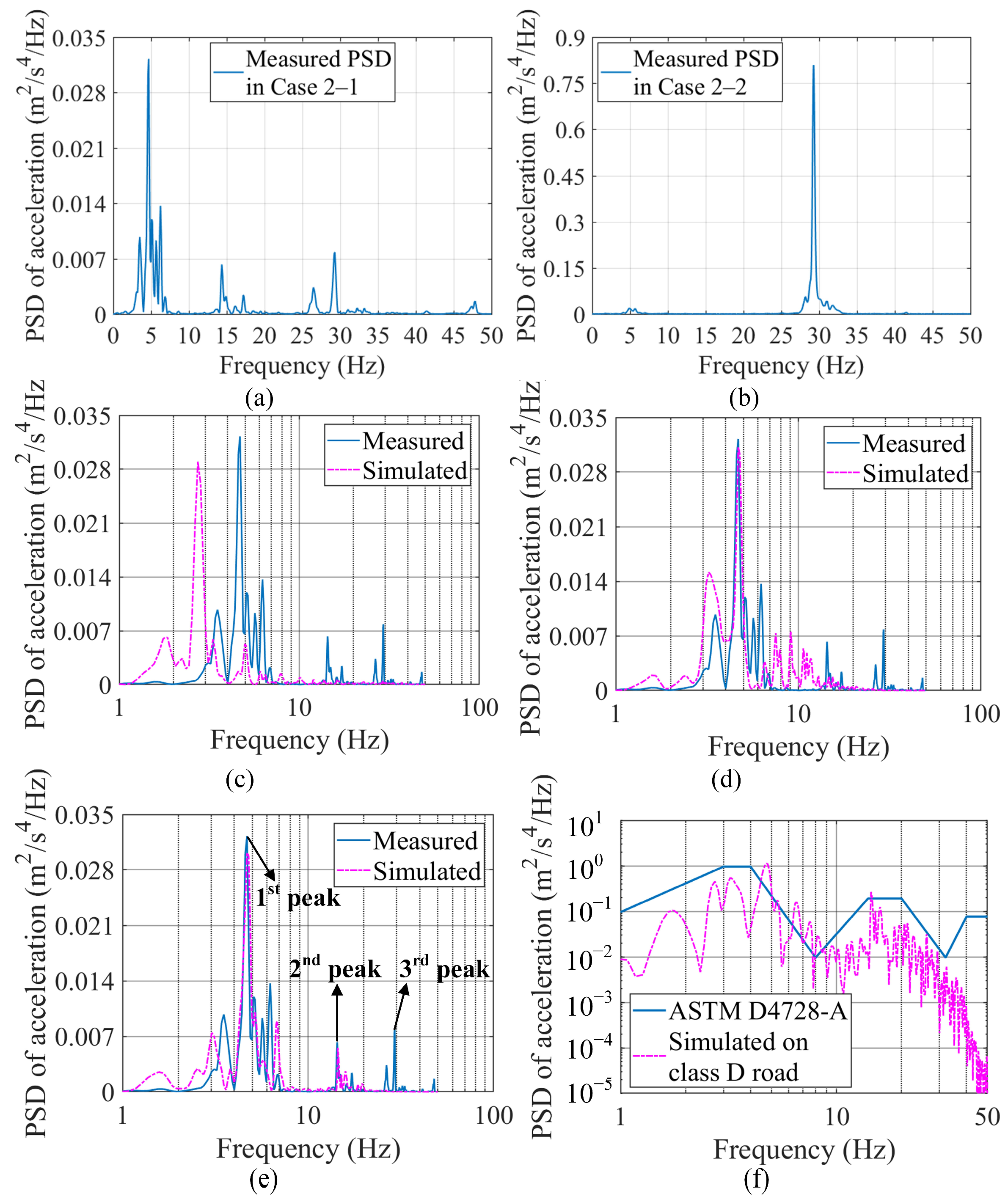
4.2.3. Measured Acceleration PSD for the Articulated Vehicle
4.2.4. Comparison of PSDs for the Articulated Vehicle
4.3. Comparison of RMS Values
5. Conclusions and Discussions
5.1. Conclusions
- The existing SHCM is suitable for calibrating small-sized vehicle models but not for multi-axle articulated vehicle models.
- Parameter sensitivity analysis of a 5-axle tractor-semitrailer model reveals that the vehicle models should be calibrated using two sensors installed on the front and rear articulated parts of the vehicle.
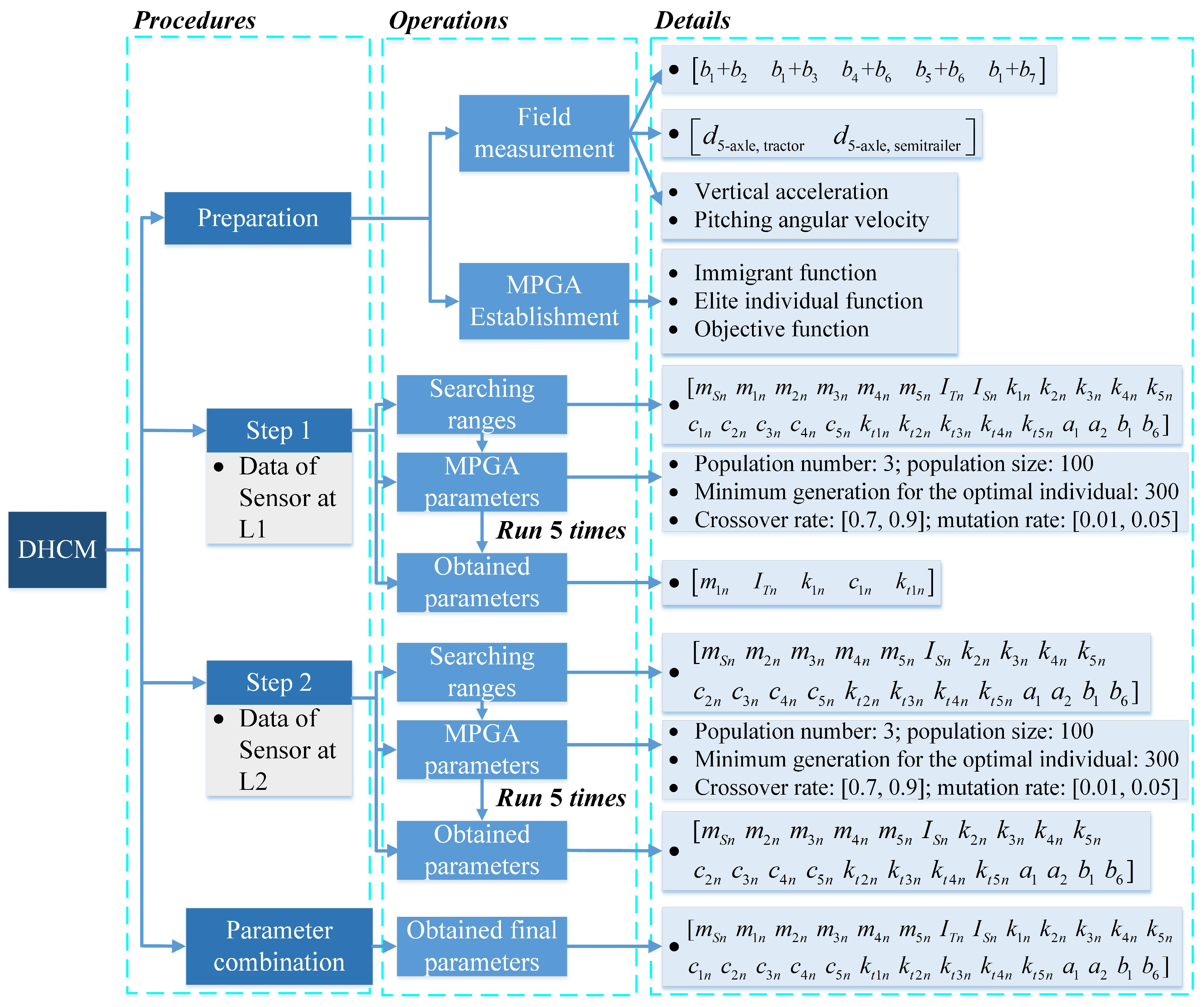
- Based on the optimal sensor arrangement, the DHCM can be conveniently implemented using smartphones to record the vehicle responses and an MPGA to determine the vehicle parameters.
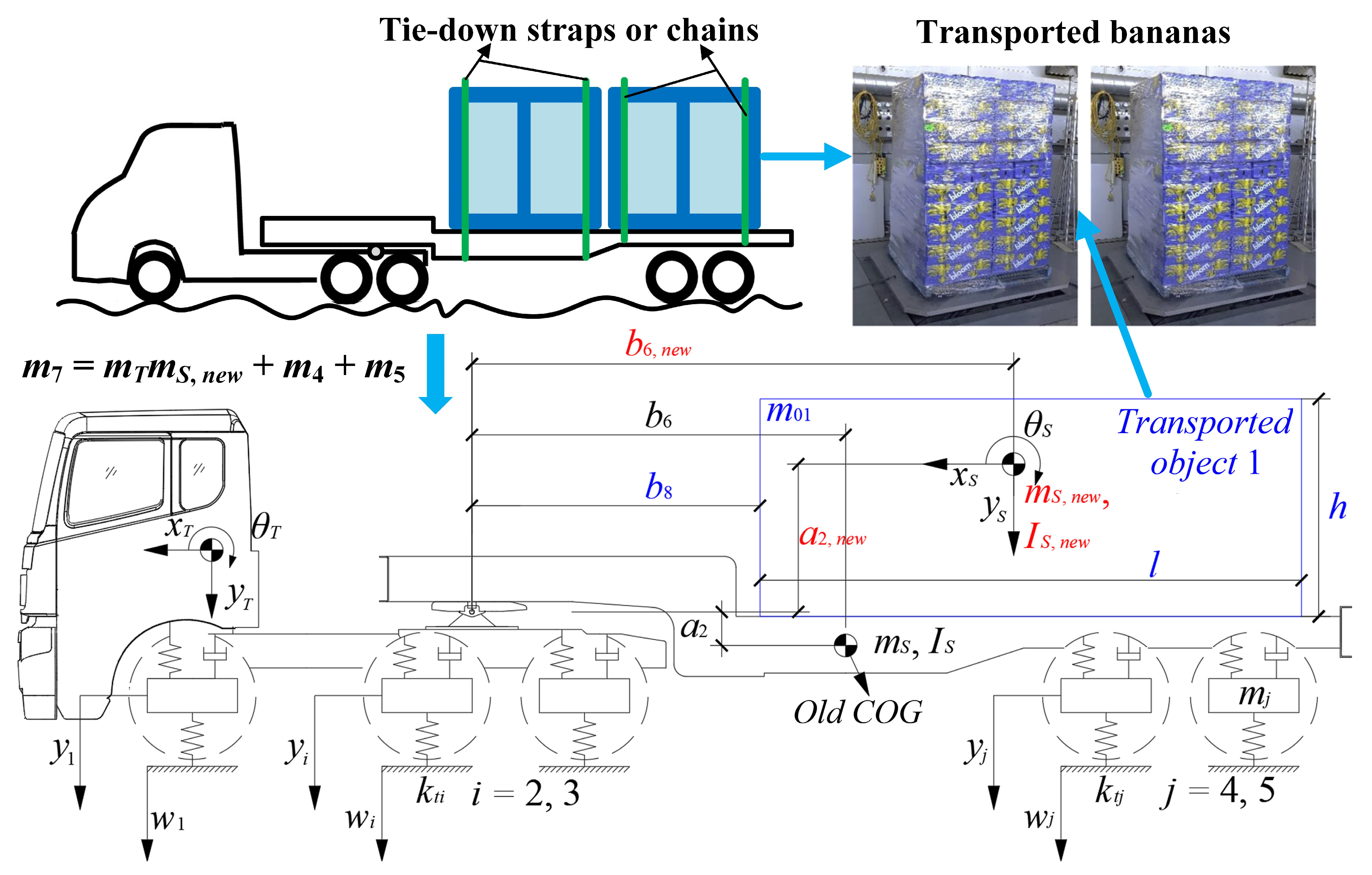
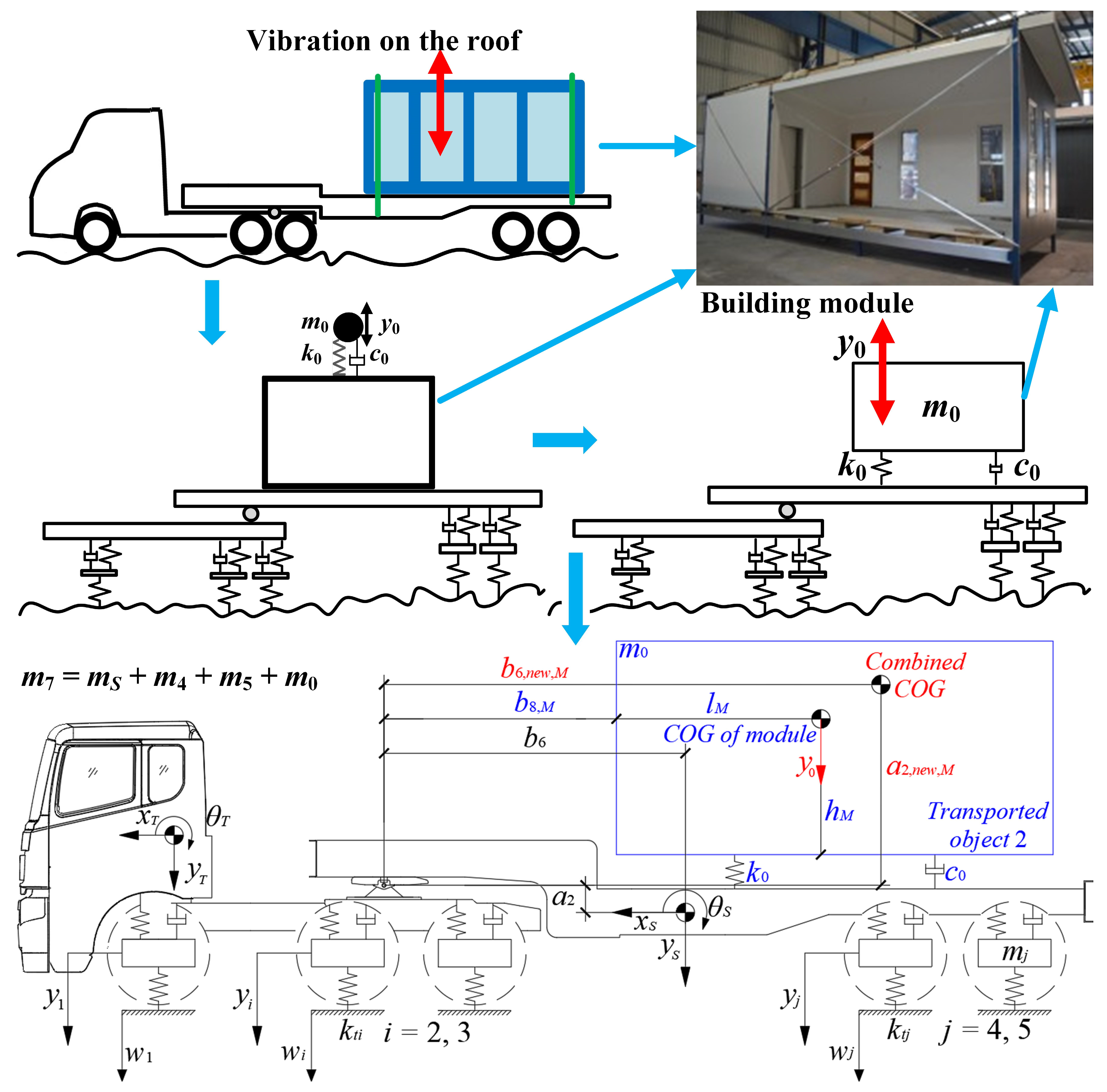
- The DHCM, supplemented by analytical methods and the FEM, is suitable for the identification of laden articulated vehicle models and specific vehicle parameters, including the height of the laden semitrailer’s COG.
- Regardless of vehicle type, the measured PSD agrees better with the simulated PSD from models calibrated with the DHCM than with that from models calibrated with the SHCM, indicating that the DHCM is suitable for calibrating small-sized vehicle models and articulated vehicle models.
- Relative RMS errors from the articulated vehicle model calibrated with the DHCM are below 16% within 2–20 Hz, demonstrating that this model realistically simulates the dynamic response of an articulated vehicle in the low-frequency range.
5.2. Discussions
- The test vehicle should be driven on a flat road during the DHCM. Class A-B roads are therefore recommended.
- Further work could focus on integrating the DHCM into low-cost hardware.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Locations | Methods | Normalized Parameters (Lf: m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Lf | mfn | mrn | IZn | kfn | krn | cfn | crn | ktfn | ktrn | ||
| Lm | SHCM | 1.43 | 0.07 | 0.08 | 1.78 | 32.42 | 58.94 | 1.85 | 2.84 | 642.66 | 606.71 |
| Lf | SHCM | 1.07 | 0.07 | 0.06 | 1.42 | 44.68 | 34.00 | 2.34 | 2.09 | 481.17 | 879.74 |
| Lr | SHCM | 1.38 | 0.02 | 0.15 | 1.66 | 35.68 | 53.64 | 1.47 | 3.39 | 589.45 | 594.84 |
| Lf and Lr | DHCM | 1.18 | 0.06 | 0.10 | 1.76 | 41.67 | 47.77 | 2.18 | 2.97 | 448.76 | 408.65 |
| Sensor Locations | Methods | Normalized Parameters (Geometric Parameters: m) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| mSn | m1n | m2n | m3n | m4n | m5n | ITn | ISn | k1n | ||
| L1 | SHCM | 2.34 | 0.03 | 0.03 | 0.03 | 0.22 | 0.03 | 2.29 | 26.96 | 60.87 |
| L2 | SHCM | 2.50 | 0.30 | 0.16 | 0.06 | 0.40 | 0.46 | 44.79 | 53.29 | 150.93 |
| L1 and L2 | DHCM | 4.77 | 0.11 | 0.40 | 0.48 | 0.57 | 0.34 | 45.75 | 95.89 | 198.83 |
| k2n | k3n | k4n | k5n | c1n | c2n | c3n | c4n | c5n | ||
| L1 | SHCM | 90.21 | 27.13 | 25.19 | 484.11 | 3.85 | 3.01 | 4.46 | 7.67 | 6.40 |
| L2 | SHCM | 40.47 | 582.96 | 309.91 | 441.12 | 2.61 | 17.60 | 7.95 | 20.57 | 4.58 |
| L1 and L2 | DHCM | 93.02 | 869.88 | 537.26 | 1313.27 | 12.57 | 33.04 | 6.80 | 36.52 | 23.60 |
| kt1n | kt2n | kt3n | kt4n | kt5n | a1 | a2 | b1 | b6 | ||
| L1 | SHCM | 447.09 | 499.58 | 1371.08 | 573.80 | 1331.17 | 0.43 | 0.84 | 1.24 | 6.51 |
| L2 | SHCM | 1170.41 | 2557.61 | 1576.68 | 1610.16 | 646.11 | 0.96 | 0.75 | 1.91 | 4.37 |
| L1 and L2 | DHCM | 1460.53 | 4488.70 | 4360.85 | 2689.24 | 808.00 | 0.97 | 0.82 | 1.32 | 4.14 |
References
- Nguyen, D.; Lam, N.; Milani, S.; Marzbani, H.; Hussaini, N.; Khayyam, H. Vehicle ride analysis considering tyre-road separation. J. Sound Vib. 2022, 521, 116674. [Google Scholar] [CrossRef]
- Godbole, S.; Lam, N.; Mafas, M.; Fernando, S.; Gad, E.; Hashemi, J. Dynamic loading on a prefabricated modular unit of a building during road transportation. J. Build. Eng. 2018, 18, 260–269. [Google Scholar] [CrossRef]
- Godbole, S.; Lam, N.; Mohamed Muhinadeen, M.M. Vehicle—Road interaction analysis for pounding between cargo and trailer-bed. Veh. Syst. Dyn. 2021, 59, 547–567. [Google Scholar] [CrossRef]
- Berardinelli, A.; Donati, V.; Giunchi, A.; Guarnieri, A.; Ragni, L. Effects of transport vibrations on quality indices of shell eggs. Biosys. Eng. 2003, 86, 495–502. [Google Scholar] [CrossRef]
- Zhou, R.; Su, S.; Yan, L.; Li, Y. Effect of transport vibration levels on mechanical damage and physiological responses of Huanghua pears (Pyrus pyrifolia Nakai, cv. Huanghua). Postharvest Biol. Technol. 2007, 46, 20–28. [Google Scholar] [CrossRef]
- Fernando, I.; Fei, J.; Stanley, R. Measurement and analysis of vibration and mechanical damage to bananas during long-distance interstate transport by multi-trailer road trains. Postharvest Biol. Technol. 2019, 158, 110977. [Google Scholar] [CrossRef]
- Paternoster, A.; Vanlanduit, S.; Springael, J.; Braet, J. Measurement and analysis of vibration and shock levels for truck transport in Belgium with respect to packaged beer during transit. Food Packag. Shelf. 2018, 15, 134–143. [Google Scholar] [CrossRef]
- Fernando, I.; Fei, J.; Stanley, R.; Enshaei, H.; Rouillard, V. Developing an accelerated vibration simulation test for packaged bananas. Postharvest Biol. Technol. 2021, 173, 111400. [Google Scholar] [CrossRef]
- Lacey, A.; Chen, W.; Hao, H.; Bi, K. Structural response of modular buildings—An overview. J. Build. Eng. 2018, 16, 45–56. [Google Scholar] [CrossRef]
- Wu, Y.; Li, Y. Development of transportation loading spectra for building modules based on a vehicle-module interaction model. Eng. Struct. 2022, 270, 114828. [Google Scholar] [CrossRef]
- Innella, F.; Bai, Y.; Zhu, Z. Acceleration responses of building modules during road transportation. Eng. Struct. 2020, 210, 110398. [Google Scholar] [CrossRef]
- Innella, F.; Bai, Y.; Zhu, Z. Mechanical performance of building modules during road transportation. Eng. Struct. 2020, 223, 111185. [Google Scholar] [CrossRef]
- Yang, Y.B.; Wang, B.; Wang, Z.; Shi, K.; Xu, H. Scanning of bridge surface roughness from two-axle vehicle response by EKF-UI and contact residual: Theoretical study. Sensors 2022, 22, 3410. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Nagayama, T.; Zhao, B.; Su, D. Identification of moving vehicle parameters using bridge responses and estimated bridge pavement roughness. Eng. Struct. 2017, 153, 57–70. [Google Scholar] [CrossRef]
- Yang, Y.; Zhu, Y.; Wang, L.; Jia, B.; Jin, R. Structural damage identification of bridges from passing test vehicles. Sensors 2018, 18, 4035. [Google Scholar] [CrossRef]
- Lee, K.; Jeong, S.; Sim, S.; Shin, D. Damage-detection approach for bridges with multi-vehicle loads using convolutional autoencoder. Sensors 2022, 22, 1839. [Google Scholar] [CrossRef]
- Iwabuki, H.; Fukada, S.; Osafune, T.; Shimura, M.; Sasaki, E. Contribution of large-vehicle vibration and bridge vibration to low-frequency noise generation characteristics. Appl. Acoust. 2019, 155, 150–166. [Google Scholar] [CrossRef]
- Corbally, R.; Malekjafarian, A. Bridge damage detection using operating deflection shape ratios obtained from a passing vehicle. J. Sound Vib. 2022, 537, 117225. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Sun, L. An indirect method for bridge mode shapes identification based on wavelet analysis. Struct. Control Health Monit. 2020, 27, e2630. [Google Scholar] [CrossRef]
- Hernandez, W.; Viviescas, A.; Riveros-Jerez, C.A. Vehicle bump testing parameters influencing modal identification of long-span segmental prestressed concrete bridges. Sensors 2022, 22, 1219. [Google Scholar] [CrossRef]
- Pinkney, B.; Dagenais, M.-A.; Wight, G. Dynamic load testing of a modular truss bridge using military vehicles. Eng. Struct. 2022, 254, 113822. [Google Scholar] [CrossRef]
- Hekič, D.; Anžlin, A.; Kreslin, M.; Žnidarič, A.; Češarek, P. Model updating concept using bridge weigh-in-motion data. Sensors 2023, 23, 2067. [Google Scholar] [CrossRef]
- Davis, L. Heavy Vehicle Suspensions—Testing and Analysis. Ph.D. Thesis, Queensland University of Technology, Brisbane, Australia, 2010. [Google Scholar]
- Rice, C.; Frankel, J.I. Estimating the forcing function in a mechanical system by an inverse calibration method. J. Vib. Control 2022, 28, 3352–3363. [Google Scholar] [CrossRef]
- Rozyn, M.; Zhang, N. A method for estimation of vehicle inertial parameters. Veh. Syst. Dyn. 2010, 48, 547–565. [Google Scholar] [CrossRef]
- Yu, Y.; Cai, C.S.; Deng, L. Vehicle axle identification using wavelet analysis of bridge global responses. J. Vib. Control 2015, 23, 2830–2840. [Google Scholar] [CrossRef]
- Bragança, C.; Neto, J.; Pinto, N.; Montenegro, P.A.; Ribeiro, D.; Carvalho, H.; Calçada, R. Calibration and validation of a freight wagon dynamic model in operating conditions based on limited experimental data. Veh. Syst. Dyn. 2022, 60, 3024–3050. [Google Scholar] [CrossRef]
- Zhao, B.; Nagayama, T.; Toyoda, M.; Makihata, N.; Takahashi, M.; Ieiri, M. Vehicle model calibration in the frequency domain and its application to large-scale IRI estimation. J. Disaster Res. 2017, 12, 446–455. [Google Scholar] [CrossRef]
- Wang, H.; Nagayama, T.; Su, D. Estimation of dynamic tire force by measurement of vehicle body responses with numerical and experimental validation. Mech. Syst. Signal Process. 2019, 123, 369–385. [Google Scholar] [CrossRef]
- Miao, Y.; Wang, G.; Rui, X. Dynamics modeling, simulation, and optimization of vibration characteristics of the tracked vehicle system. J. Vib. Control 2020, 27, 2451–2465. [Google Scholar] [CrossRef]
- Zhao, B.; Nagayama, T.; Xue, K. Road profile estimation, and its numerical and experimental validation, by smartphone measurement of the dynamic responses of an ordinary vehicle. J. Sound Vib. 2019, 457, 92–117. [Google Scholar] [CrossRef]
- Cantero, D.; Obrien, E.J.; González, A. Modelling the vehicle in vehicle—Infrastructure dynamic interaction studies. Proc. Inst. Mech. Eng. Part K-J. Multi-Body Dyn. 2010, 224, 243–262. [Google Scholar] [CrossRef]
- Harris, N.K.; Obrien, E.J.; González, A. Reduction of bridge dynamic amplification through adjustment of vehicle suspension damping. J. Sound Vib. 2007, 302, 471–485. [Google Scholar] [CrossRef]
- Elmadany, M.M. Design and optimization of truck suspensions using covariance analysis. Comput. Struct. 1988, 28, 241–246. [Google Scholar] [CrossRef]
- González, A.; Cantero, D.; Obrien, E.J. Dynamic increment for shear force due to heavy vehicles crossing a highway bridge. Comput. Struct. 2011, 89, 2261–2272. [Google Scholar] [CrossRef]
- Romero, J.A.; Lozano-Guzmán, A.A.; Obregón-Biosca, S.A.; Betanzo-Quezada, E. A plane model of the interaction of a vehicle with the road infrastructure. Adv. Eng. Softw. 2018, 117, 46–58. [Google Scholar] [CrossRef]
- Lin, J.; Lin, Z.; Ma, L.; Xu, T.; Chen, D.; Zhang, J. Analysis and optimization of coupled vibration between substructures of a multi-axle vehicle. J. Vib. Control 2018, 25, 1031–1043. [Google Scholar] [CrossRef]
- Wang, D.; Zhang, Z.; Bai, R.; Mao, Y. A hybrid system with filter approach and multiple population genetic algorithm for feature selection in credit scoring. J. Comput. Appl. Math. 2018, 329, 307–321. [Google Scholar] [CrossRef]
- Angelova, M.; Roeva, O.; Vassilev, P.; Pencheva, T. Multi-Population Genetic Algorithm and Cuckoo Search Hybrid Technique for Parameter Identification of Fermentation Process Models. Processes 2023, 11, 427. [Google Scholar] [CrossRef]
- Sharafi, P.; Rashidi, M.; Alembagheri, M.; Bigdeli, A. System identification of a volumetric steel modular frame using experimental and numerical vibration analysis. J. Archit. Eng. 2021, 27, 04021032. [Google Scholar] [CrossRef]
- ISO 8608; Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data. International Standard: Geneva, Switzerland, 2016.
- ASTM D4728; Standard Test Method for Random Vibration Testing of Shipping Containers. American Society for Testing Material: West Conshohocken, PA, USA, 2012.



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Li, Y. Development and Validation of a Double-Sensor Hump Calibration Method for Articulated Vehicle Model Identification. Sensors 2023, 23, 9691. https://doi.org/10.3390/s23249691
Wu Y, Li Y. Development and Validation of a Double-Sensor Hump Calibration Method for Articulated Vehicle Model Identification. Sensors. 2023; 23(24):9691. https://doi.org/10.3390/s23249691
Chicago/Turabian StyleWu, Yuhang, and Yuanqi Li. 2023. "Development and Validation of a Double-Sensor Hump Calibration Method for Articulated Vehicle Model Identification" Sensors 23, no. 24: 9691. https://doi.org/10.3390/s23249691
APA StyleWu, Y., & Li, Y. (2023). Development and Validation of a Double-Sensor Hump Calibration Method for Articulated Vehicle Model Identification. Sensors, 23(24), 9691. https://doi.org/10.3390/s23249691