
A Customized Extended Kalman Filter for Removing the Impact of the Magnetometer’s Measurements on Inclination Determination


Abstract
:1. Introduction
2. Analysis of the State Transition and Measurement Models That Were Used for the Extended Kalman Filter
2.1. Sensor Model
2.2. State Transition Model
2.3. Measurement Model
2.4. Calculation of the Error Covariance Matrices of the State Transition Model and the Measurement Model
3. Simulation, Experimental Results, and Discussion
3.1. Static Evaluation
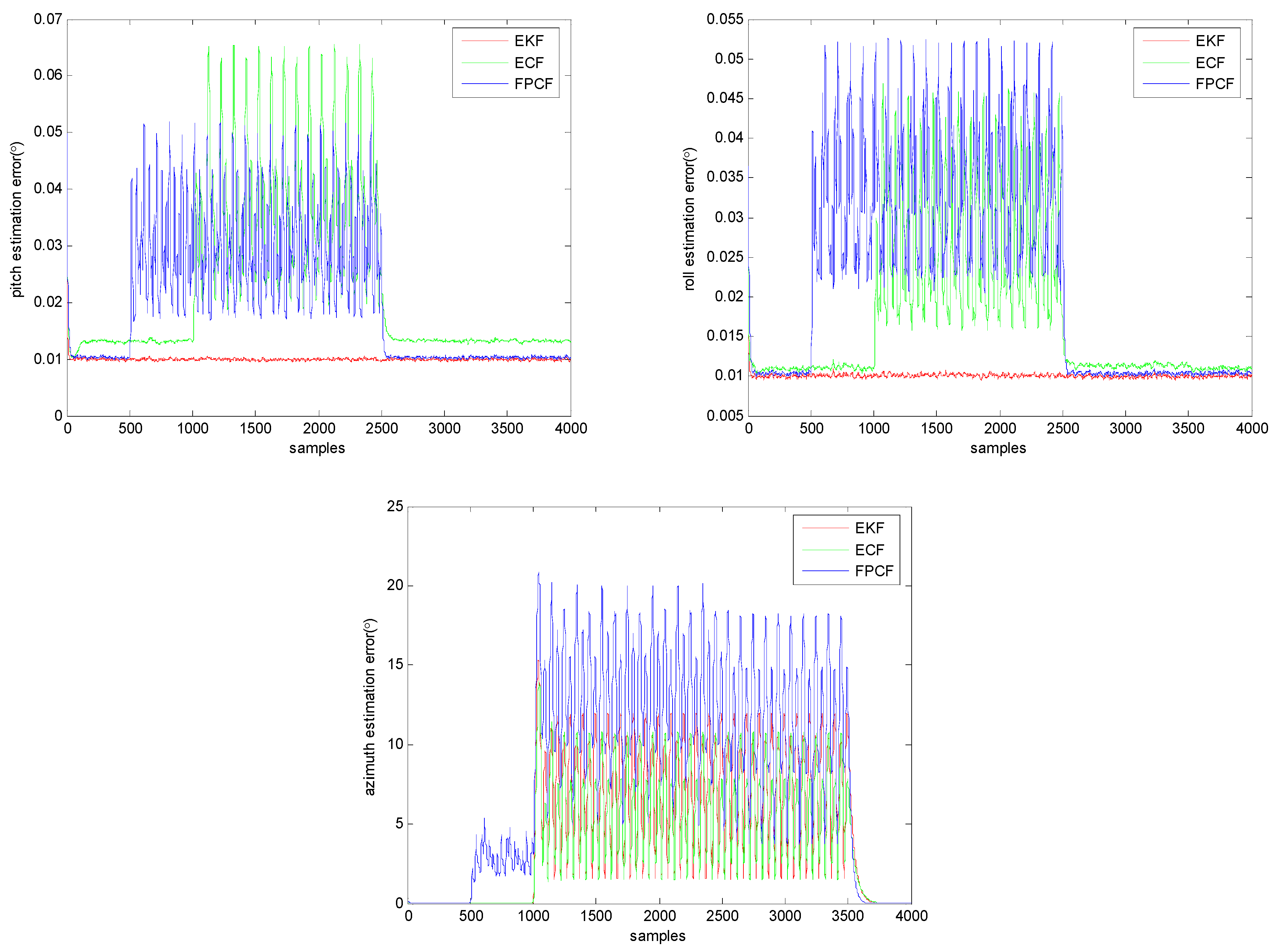
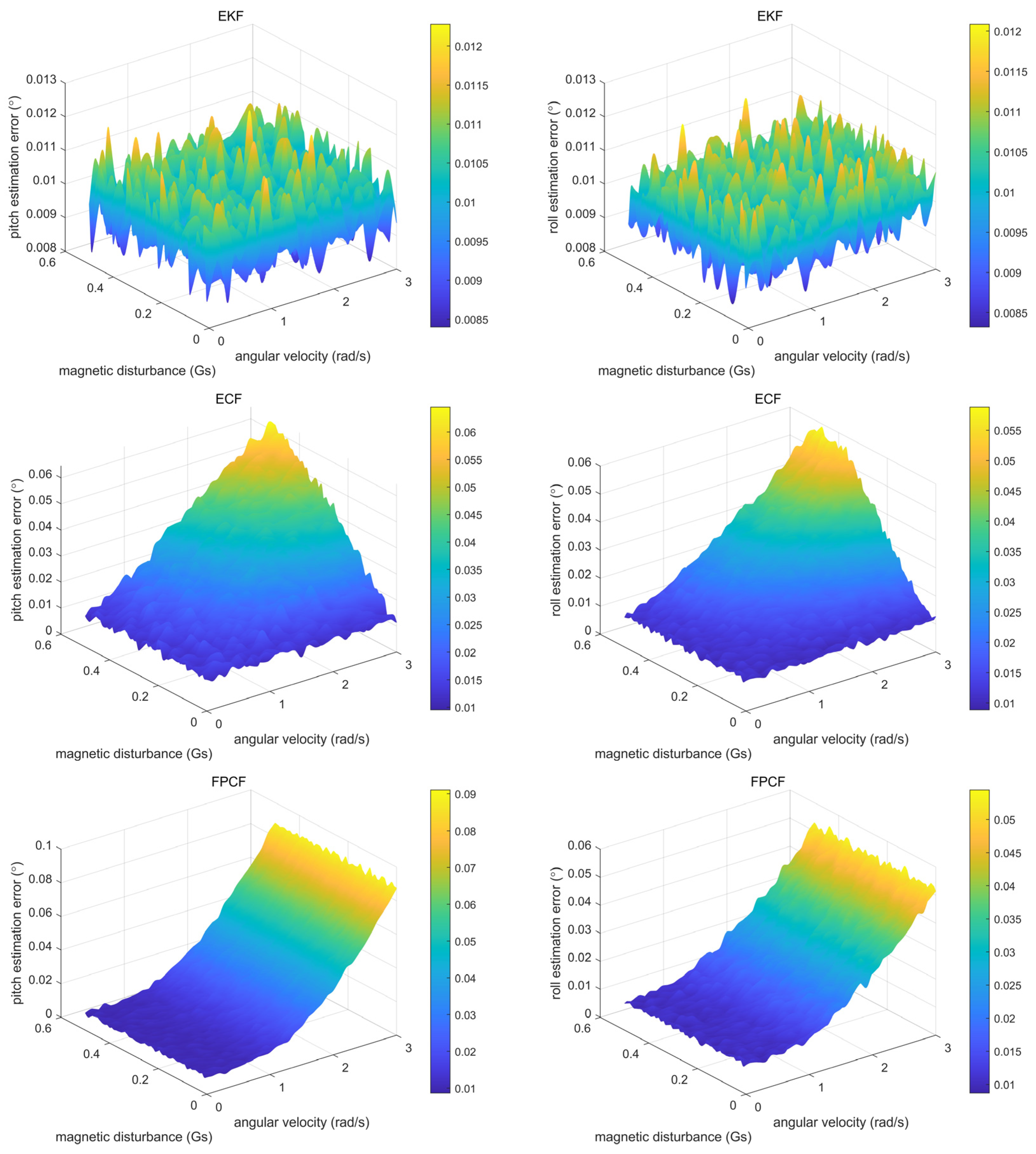
3.2. Rotational Test by Incorporating Magnetic Disturbance
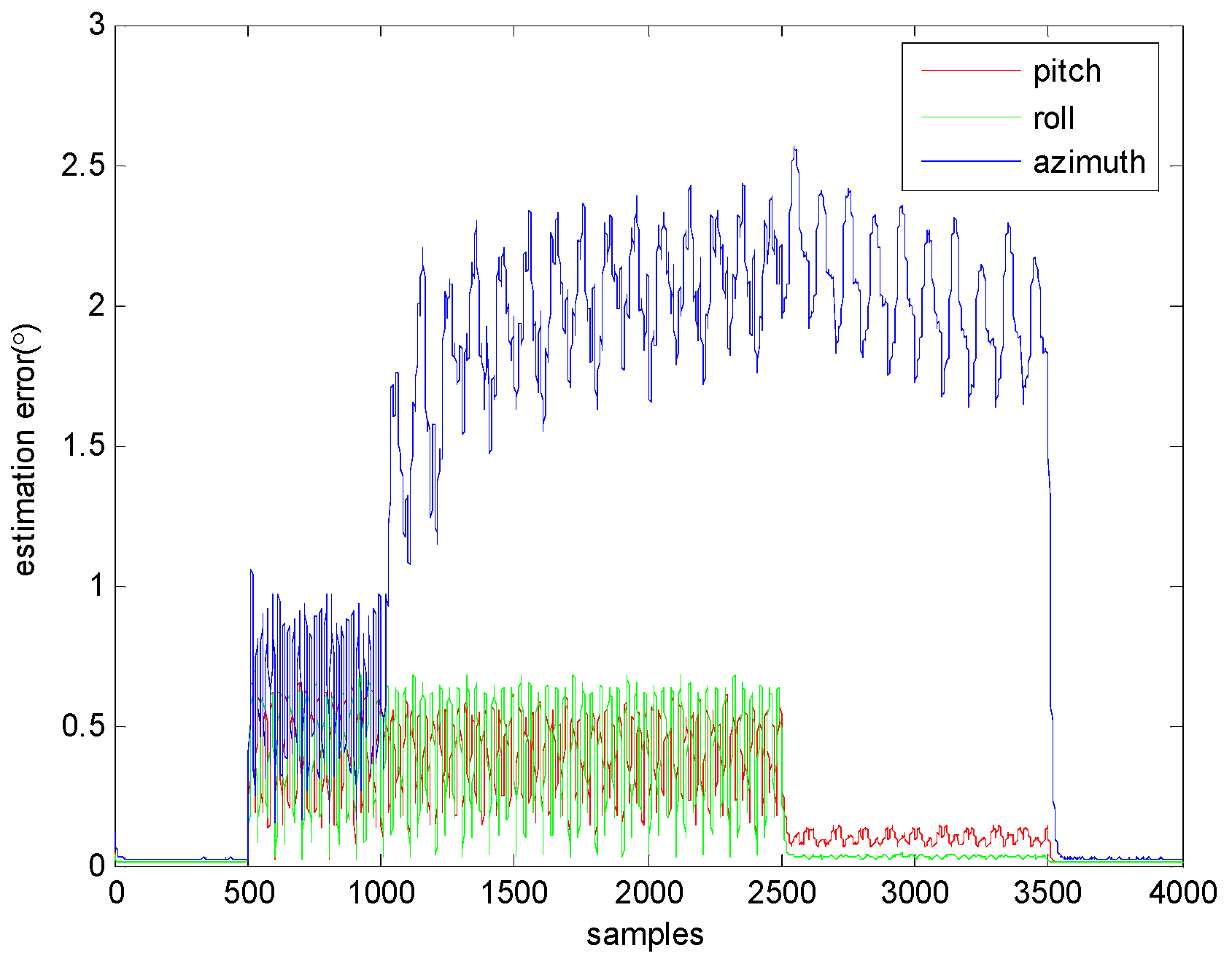
3.3. Performance of FCF
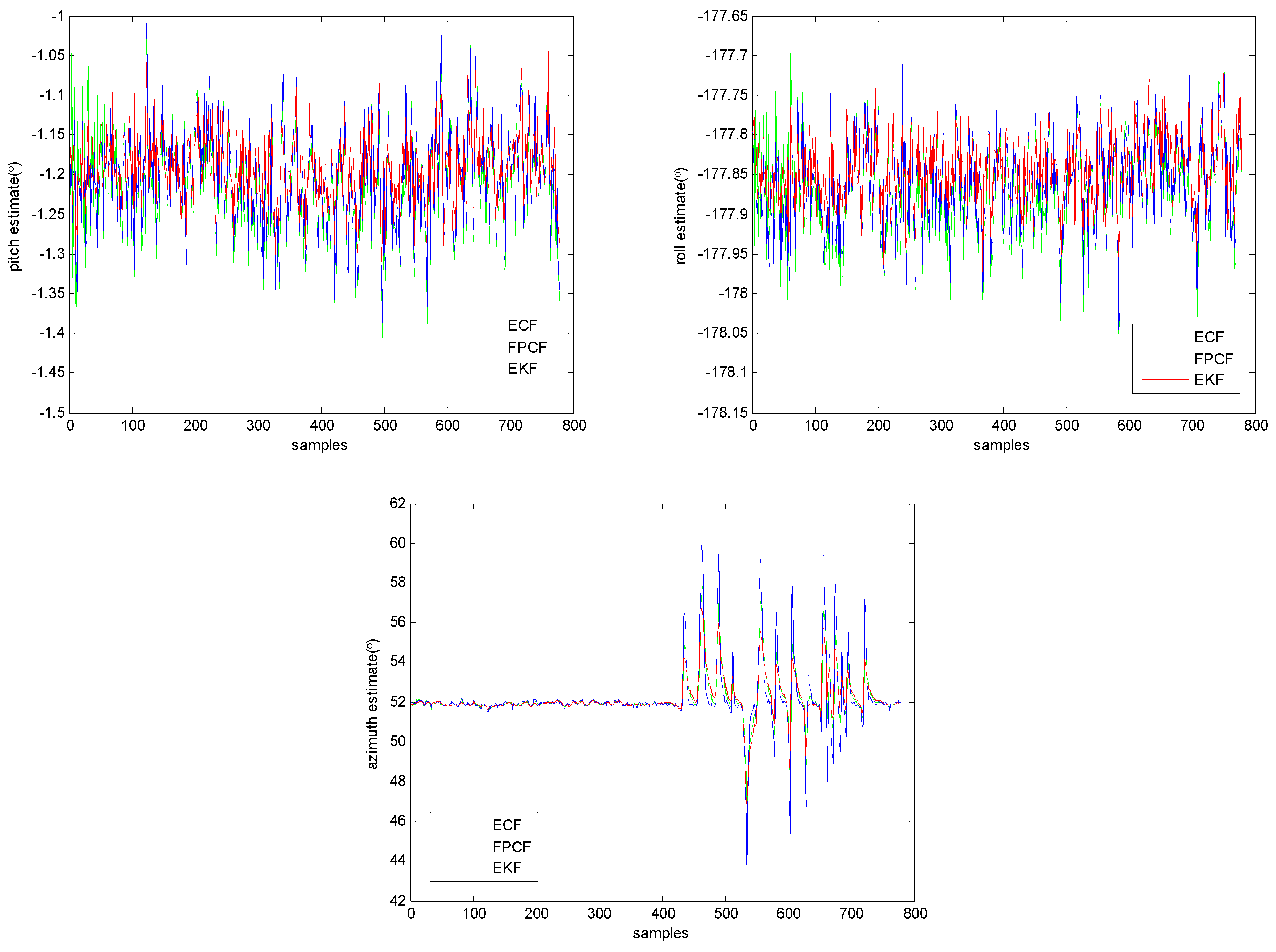
3.4. Performance Evaluation Using Real Sensor Measurements
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zmitri, M.; Fourati, H.; Vuillerme, N. Human activities and postures recognition: From inertial measurements to quaternion-based approaches. Sensors 2019, 19, 4058. [Google Scholar] [CrossRef] [PubMed]
- Sun, Y.; Xu, X.; Tian, X.; Zhou, L.; Li, Y. A quaternion-based sensor fusion approach using orthogonal observations from 9D inertial and magnetic information. Inf. Fusion 2023, 90, 138–147. [Google Scholar] [CrossRef]
- Cordoba, M.A. Inclination and heading reference system I-AHRS for the EFIGENIA autonomous unmanned aerial vehicles UAV based on MEMS sensor and a neural network strategy for inclination estimation. In Proceedings of the Mediterranean Conference on Control & Automation, Athens, Greece, 27–29 June 2007; pp. 1–8. [Google Scholar]
- Shi, L.; Xiao, R.; Guo, S.; Guo, P.; Pan, S.; He, Y. An inclination estimation system for amphibious spherical robots. In Proceedings of the IEEE International Conference on Mechatronics and Automation, Beijing, China, 2–5 August 2015; pp. 2076–2081. [Google Scholar]
- Sheng, G.; Liu, X.; Sheng, Y.; Cheng, X.; Luo, H. Cooperative navigation algorithm of extended Kalman filter based on combined observation for AUVs. Remote Sens. 2023, 15, 533. [Google Scholar] [CrossRef]
- Odry, Á.; Kecskes, I.; Sarcevic, P.; Vizvari, Z.; Toth, A.; Odry, P. A novel fuzzy-adaptive extended Kalman filter for real-time inclination estimation of mobile robots. Sensors 2020, 20, 803. [Google Scholar] [CrossRef]
- Valenti, R.G.; Dryanovski, I.; Xiao, J.Z. A linear Kalman filter for MARG orientation estimation using the algebraic quaternion algorithm. IEEE Trans. Instrum. Meas. 2016, 65, 467–481. [Google Scholar] [CrossRef]
- Chen, X.; Xie, Z.; Eun, Y.; Bettens, A.; Wu, X. An observation model from linear interpolation for quaternion-based attitude estimation. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Ren, H.; Kazanzides, P. Investigation of inclination tracking using an integrated inertial and magnetic navigation system for hand-held surgical instruments. IEEE/ASME Trans. Mechatron. 2012, 17, 210–217. [Google Scholar] [CrossRef]
- Alarcón, J.R.C.; Cortés, H.R.; Vivas, E.V. Extended Kalman filter tuning in inclination estimation from inertial and magnetic field measurements. In Proceedings of the 6th International Conference on Electrical Engineering, Computing Science and Automatic Control, Toluca, Mexico, 10–13 November 2009; pp. 1–6. [Google Scholar]
- Yun, X.P.; Bachmann, E.R. Design, implementation, and experimental results of a quaternion-based Kalman filter for human body motion tracking. IEEE Trans. Robot. 2006, 22, 1216–1227. [Google Scholar] [CrossRef]
- Fang, B.; Sun, F.; Liu, H.; Guo, D. Development of a wearable device for motion capturing based on magnetic and inertial measurement units. Sci. Program. 2017, 2017, 7594763. [Google Scholar] [CrossRef]
- Sessa, S.; Zecca, M.; Lin, Z.; Bartolomeo, L.; Ishii, H.; Takanishi, A. A methodology for the performance evaluation of inertial measurement units. J. Intell. Robot. Syst. 2013, 71, 143–157. [Google Scholar] [CrossRef]
- Rong, H.; Zhu, Y.; Lv, J.; Peng, C.; Zou, L. A simplified extended Kalman filter used for magnetic and inertial measurement units. IEEE Sens. J. 2020, 21, 6356–6366. [Google Scholar] [CrossRef]
- Sabatini, A.M. Quaternion-based extended Kalman filter for determining orientation by inertial and magnetic sensing. IEEE Trans. Biomed. Eng. 2006, 53, 1346–1356. [Google Scholar] [CrossRef]
- Ghobadi, M.; Singla, P.; Esfahani, E.T. Robust inclination estimation from uncertain observations of inertial sensors using covariance inflated multiplicative extended Kalman filter. IEEE Trans. Instrum. Meas. 2018, 67, 209–217. [Google Scholar] [CrossRef]
- Hua, S.; Huang, H.Y.; Yin, F.F. Constant-gain EKF algorithm for satellite inclination determination systems. Aircr. Eng. Aerosp. Technol. 2018, 90, 1259–1271. [Google Scholar] [CrossRef]
- Tong, X.; Li, Z.; Han, G.; Liu, N.; Su, Y.; Ning, J.; Yang, F. Adaptive EKF based on HMM recognizer for inclination estimation using MEMS MARG sensors. IEEE Sens. J. 2018, 18, 3299–3310. [Google Scholar] [CrossRef]
- Youn, W.; Rhudy, M.B.; Cho, A.; Myung, H. Fuzzy adaptive inclination estimation for a fixed-wing UAV with a virtual SSA sensor during a GPS outage. IEEE Sens. J. 2020, 20, 1456–1472. [Google Scholar] [CrossRef]
- Yuan, Q.; Asadi, E.; Lu, Q.; Yang, G.; Chen, I.M. Uncertainty-based IMU orientation tracking algorithm for dynamic motions. IEEE/ASME Trans. Mechatron. 2019, 24, 872–882. [Google Scholar] [CrossRef]
- Chiella, A.C.B.; Teixeira, B.O.S.; Pereira, G.A.S. Quaternion-based robust inclination estimation using an adaptive unscented Kalman filter. Sensors 2019, 19, 2372. [Google Scholar] [CrossRef] [PubMed]
- Xu, X.; Tian, X.; Zhou, L.; Li, Y. A decision-tree based multiple-model UKF for inclination estimation using low-cost MEMS MARG sensor arrays. Measurement 2019, 135, 355–367. [Google Scholar] [CrossRef]
- Qiu, Z.B.; Qian, H.M.; Wang, G.Q. Adaptive robust cubature Kalman filtering for satellite inclination estimation. Chin. J. Aeronaut. 2018, 31, 806–819. [Google Scholar] [CrossRef]
- To, G.; Mahfouz, M.R. Quaternionic inclination estimation for robotic and human motion tracking using sequential Monte Carlo methods with von Mises-Fisher and nonuniform densities simulations. IEEE Trans. Biomed. Eng. 2013, 60, 3046–3059. [Google Scholar] [CrossRef] [PubMed]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No.00EX373), Lake Louise, AB, Canada, 4 October 2000. [Google Scholar]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Garcia, R.V.; Pardal, P.C.; Kuga, H.K.; Zanardi, M.C. Nonlinear filtering for sequential spacecraft inclination estimation with real data: Cubature Kalman Filter, Unscented Kalman Filter and Extended Kalman Filter. Adv. Space Res. 2019, 63, 1038–1050. [Google Scholar] [CrossRef]
- Garcia, R.V.; Silva, W.R.; Pardal, P.C.; Kuga, H.K.; Zanardi, M.C. Sequential nonlinear estimation: Regularized particle filter applied to the inclination estimation problem with real data. Comput. Appl. Math. 2018, 37, S110–S121. [Google Scholar] [CrossRef]
- Li, K.; Hu, B.; Chang, L.; Li, Y. Comparison of direct navigation mode and indirect navigation mode for integrated SINS/GPS. Trans. Inst. Meas. Control 2016, 38, 3–13. [Google Scholar] [CrossRef]
- Fourati, H.; Manamanni, N.; Afilal, L.; Handrich, Y. Complementary observer for body segments motion capturing by inertial and magnetic sensors. IEEE/ASME Trans. Mechatron. 2014, 19, 149–157. [Google Scholar] [CrossRef]
- Yun, X.; Calusdian, J.; Bachmann, E.R.; McGhee, R.B. Estimation of human foot motion during normal walking using inertial and magnetic sensor measurements. IEEE Trans. Instrum. Meas. 2012, 61, 2059–2072. [Google Scholar] [CrossRef]
- Fan, B.; Li, Q.; Wang, C.; Liu, T. An adaptive orientation estimation method for magnetic and inertial sensors in the presence of magnetic disturbance. Sensors 2017, 17, 1161. [Google Scholar] [CrossRef]
- Yean, S.; Lee, B.S.; Yeo, C.K.; Vun, C.H.; Oh, H.L. Smartphone orientation estimation algorithm combining Kalman filter with gradient descent. IEEE J. Biomed. Health Inform. 2018, 22, 1421–1433. [Google Scholar] [CrossRef]
- Madgwick, S.O.H.; Harrison, A.J.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011; pp. 1–7. [Google Scholar]
- Liu, G.X.; Shi, L.F.; Xun, J.H.; Chen, S.; Zhao, L.; Shi, Y.F. An orientation estimation algorithm based on multi-source information fusion. Meas. Sci. Technol. 2018, 29, 115101–115111. [Google Scholar] [CrossRef]
- Bergamini, E.; Ligorio, G.; Summa, A.; Vannozzi, G.; Cappozzo, A.; Sabatini, A.M. Estimating orientation using magnetic and inertial sensors and different sensor fusion approaches: Accuracy assessment in manual and locomotion tasks. Sensors 2014, 14, 18625. [Google Scholar] [CrossRef] [PubMed]
- Brückner, H.P.; Krüger, B.; Blume, H. Reliable orientation estimation for mobile motion capturing in medical rehabilitation sessions based on inertial measurement units. Microelectron. J. 2014, 45, 1603–1611. [Google Scholar] [CrossRef]
- Harms, H.; Amft, O.; Winkler, R.; Schumm, J.; Kusserow, M.; Tröster, G. ETHOS: Miniature orientation sensor for wearable human motion analysis. In Proceedings of the IEEE Conference on Sensors, Waikoloa, HI, USA, 1–4 November 2010; pp. 1037–1042. [Google Scholar]
- Choi, J.S.; Lee, C.J.; Lee, J.K. A parallel recurrent neural network for robust inertial and magnetic sensor-based 3D orientation estimation. IEEE Access 2023, 11, 89685–89693. [Google Scholar] [CrossRef]
- Madgwick, S.O.; Wilson, S.; Turk, R.; Burridge, J.; Kapatos, C.; Vaidyanathan, R. An extended complementary filter for full-body MARG orientation estimation. IEEE/ASME Trans. Mechatron. 2020, 25, 2054–2064. [Google Scholar] [CrossRef]
- Suh, Y.S. Attitude estimation using inertial and magnetic sensors based on hybrid four-parameter complementary filter. IEEE Trans. Instrum. Meas. 2020, 69, 5149–5156. [Google Scholar] [CrossRef]
- Wu, J.; Zhou, Z.; Chen, J.; Fourati, H.; Li, R. Fast complementary filter for inclination estimation using low-cost MARG sensors. IEEE Sens. J. 2016, 16, 6997–7007. [Google Scholar] [CrossRef]
- Markley, F.L.; Crassidis, J.L. Fundamentals of Spacecraft Attitude Determination and Control; Microcosm Press: Cleveland, OH, USA; Springer: New York, NY, USA, 2014. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EKF | ECF | FPCF | |
|---|---|---|---|
| pitch | 0.0129 | 0.0134 (Knorm = 7.3) | 0.0134 (a = 7.4) |
| roll | 0.0130 | 0.0134 (Knorm = 3.9) | 0.0134 (a = 7.2) |
| azimuth | 0.0213 | 0.0210 (Knorm = 2.4) | 0.0383 (a = 6.6) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Y.; Rong, H. A Customized Extended Kalman Filter for Removing the Impact of the Magnetometer’s Measurements on Inclination Determination. Sensors 2023, 23, 9756. https://doi.org/10.3390/s23249756
Chen Y, Rong H. A Customized Extended Kalman Filter for Removing the Impact of the Magnetometer’s Measurements on Inclination Determination. Sensors. 2023; 23(24):9756. https://doi.org/10.3390/s23249756
Chicago/Turabian StyleChen, Yang, and Hailong Rong. 2023. "A Customized Extended Kalman Filter for Removing the Impact of the Magnetometer’s Measurements on Inclination Determination" Sensors 23, no. 24: 9756. https://doi.org/10.3390/s23249756
APA StyleChen, Y., & Rong, H. (2023). A Customized Extended Kalman Filter for Removing the Impact of the Magnetometer’s Measurements on Inclination Determination. Sensors, 23(24), 9756. https://doi.org/10.3390/s23249756