
Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots

 , , and
, , and
Abstract
1. Introduction
- Flywheels can correct orientation errors (e.g., due to disturbances or tracking inaccuracies in the angular momentum achieved at the lift-off) during flight in a continuous manner.
- They can track a time-varying reference, e.g., the robot can land with a desired angular velocity (possibly zero) and orientation.
- Even in the presence of contact, the landing phase can be enhanced or dynamic gaits, such as a trot, stabilized, by significantly reducing trunk oscillations.
- The presence of these additional joints, the only functions of which are to control orientation, provides the possibility of relieving the efforts of the legs.
1.1. Proposed Approach and Contribution
- the design of a novel OCS that enables effective control of the orientation of a legged robot during a jump, while keeping the design simple. In particular, the axes of rotation of the flywheels are set to be incident, enabling continuous controllability in both directions of roll and pitch, while keeping the device compact.
- simulations with the quadruped Solo12 were conducted and demonstrated the effectiveness of the proposed approach.
1.2. Outline
2. Background
Preliminary Analysis
3. Orientation Control System
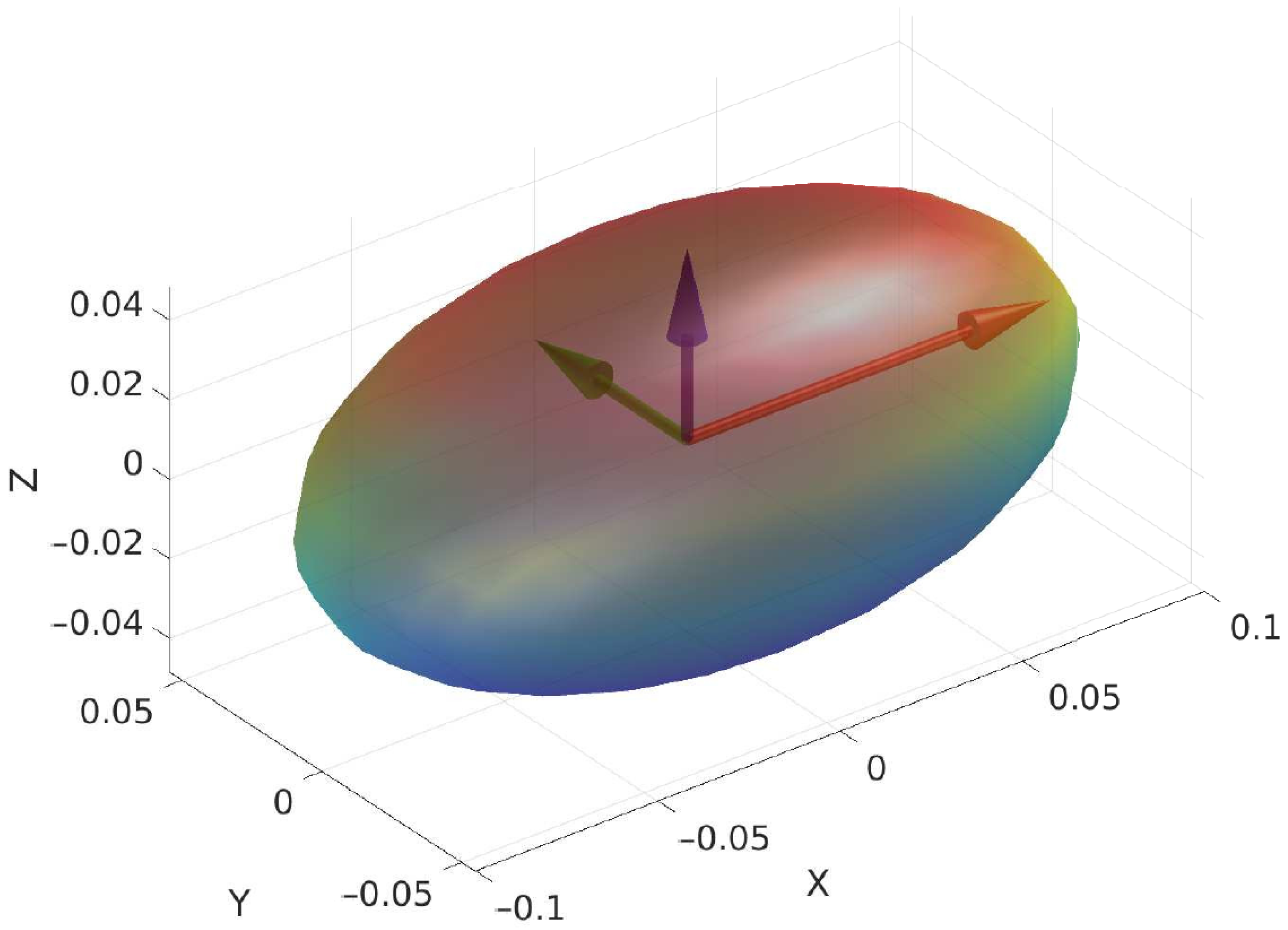
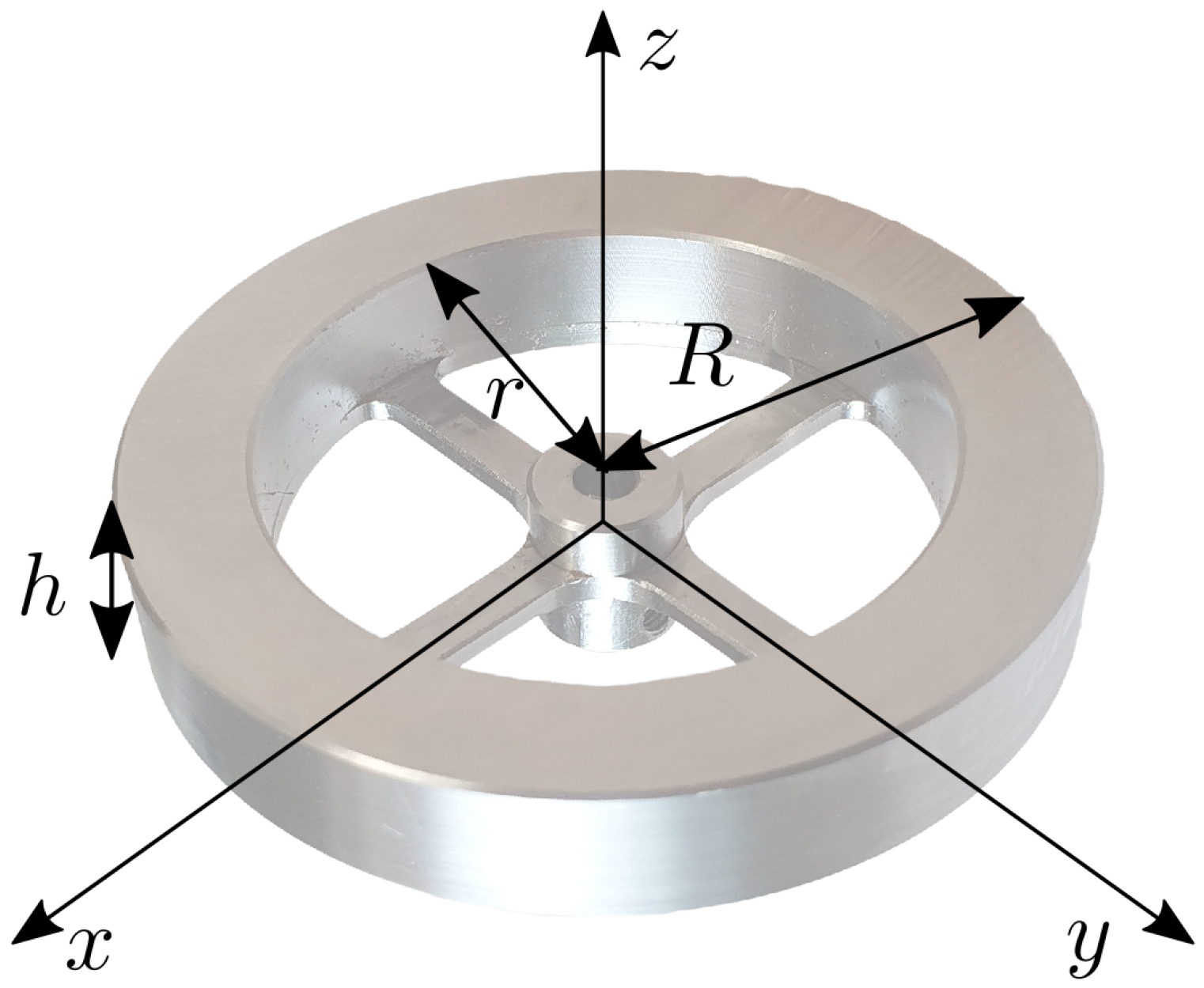
3.1. Bounds on the Inertia
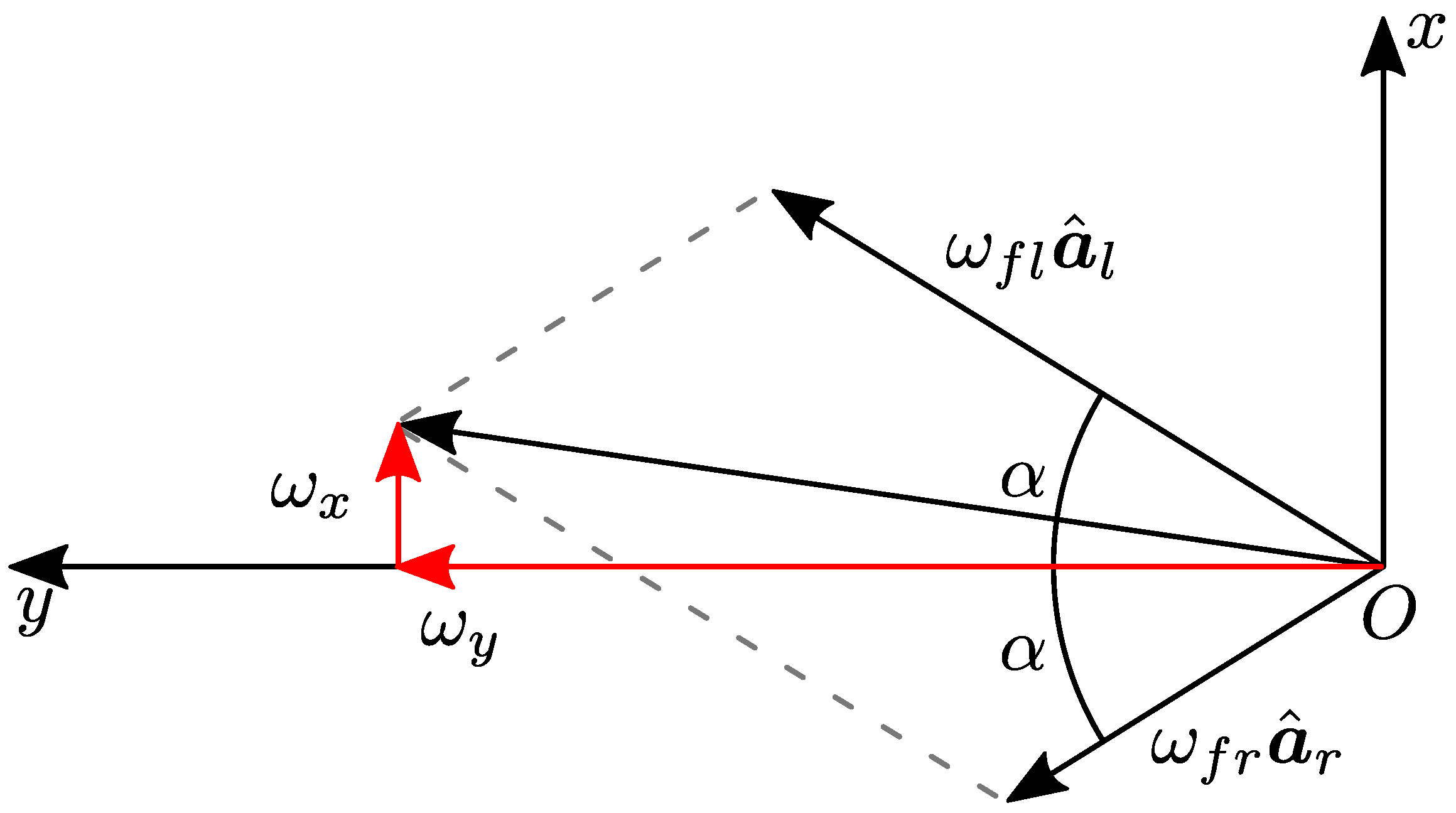
3.2. Flywheels’ Axes of Rotation
3.3. Inertia Selection
3.4. Flywheels’ Control Law
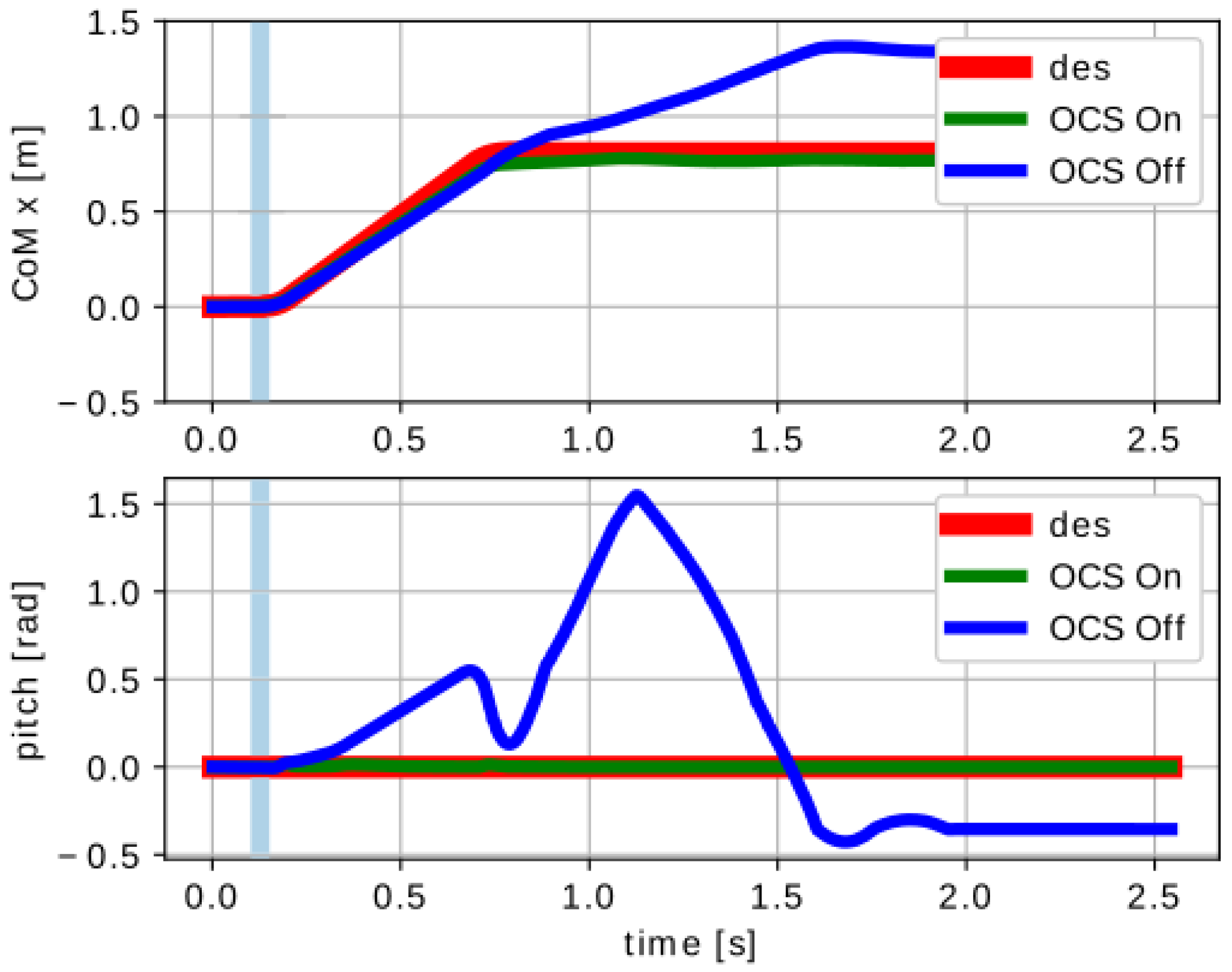
4. Results of Simulations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DoF | Degree of Freedom |
| CoM | Center of Mass |
| OCS | Orientation Control System |
| CMG | Control Moment Gyroscope |
| DDP | Differential Dynamic Programming |
| NMPC | Nonlinear Model Predictive Control |
References
- Barasuol, V.; Buchli, J.; Semini, C.; Frigerio, M.; De Pieri, E.R.; Caldwell, D.G. A reactive controller framework for quadrupedal locomotion on challenging terrain. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2554–2561. [Google Scholar]
- Focchi, M.; Orsolino, R.; Camurri, M.; Barasuol, V.; Mastalli, C.; Caldwell, D.G.; Semini, C. Heuristic planning for rough terrain locomotion in presence of external disturbances and variable perception quality. In Advances in Robotics Research: From Lab to Market; Springer: Berlin/Heidelberg, Germany, 2020; pp. 165–209. [Google Scholar]
- Kane, T.; Scher, M. A dynamical explanation of the falling cat phenomenon. Int. J. Solids Struct. 1969, 5, 663–670. [Google Scholar] [CrossRef]
- Chu, X.; Lo, C.H.D.; Ma, C.; Au, K.W.S. Null-Space-Avoidance-Based Orientation Control Framework for Underactuated, Tail-Inspired Robotic Systems in Flight Phase. IEEE Robot. Autom. Lett. 2019, 4, 3916–3923. [Google Scholar] [CrossRef]
- Wenger, G.; De, A.; Koditschek, D.E. Frontal plane stabilization and hopping with a 2DOF tail. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 567–573. [Google Scholar]
- Johnson, A.M.; Libby, T.; Chang-Siu, E.; Tomizuka, M.; Full, R.J.; Koditschek, D.E. Tail assisted dynamic self righting. In Adaptive Mobile Robotics; World Scientific: Singapore, 2012; pp. 611–620. [Google Scholar]
- An, J.; Ma, X.; Lo, C.H.D.; Ng, W.; Chu, X.; Au, K.W.S. Design and Experimental Validation of a Monopod Robot with 3-DoF Morphable Inertial Tail for Somersault. IEEE/ASME Trans. Mechatron. 2022, 7, 5072–5083. [Google Scholar] [CrossRef]
- An, J.; Chung, T.; Lo, C.H.D.; Ma, C.; Chu, X.; Au, K.S. Development of a bipedal hopping robot with morphable inertial tail for agile locomotion. In Proceedings of the 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), New York City, NY, USA, 29 November–1 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 132–139. [Google Scholar]
- Tang, Y.; An, J.; Chu, X.; Wang, S.; Wong, C.Y.; Au, K. Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail. arXiv 2022, arXiv:2209.15337. [Google Scholar]
- Hoffman, E.M.; Paolillo, A. Exploiting visual servoing and centroidal momentum for whole-body motion control of humanoid robots in absence of contacts and gravity. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 2979–2985. [Google Scholar]
- Kurtz, V.; Li, H.; Wensing, P.M.; Lin, H. Mini cheetah, the falling cat: A case study in machine learning and trajectory optimization for robot acrobatics. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 23–27 May 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 4635–4641. [Google Scholar]
- Yoon, H.; Tsiotras, P. Spacecraft adaptive attitude and power tracking with variable speed control moment gyroscopes. J. Guid. Control. Dyn. 2002, 25, 1081–1090. [Google Scholar] [CrossRef]
- Brown, H.B.; Xu, Y. A single-wheel, gyroscopically stabilized robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; IEEE: Piscataway, NJ, USA, 1996; Volume 4, pp. 3658–3663. [Google Scholar]
- Mikhalkov, N.; Prutskiy, A.; Sechenev, S.; Kazakov, D.; Simulin, A.; Sokolov, D.; Ryadchikov, I. Gyrubot: Nonanthropomorphic stabilization for a biped. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 4976–4982. [Google Scholar]
- Oland, E.; Schlanbusch, R. Reaction wheel design for cubesats. In Proceedings of the 2009 4th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, 11–13 June 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 778–783. [Google Scholar]
- Brown, T.L.; Schmiedeler, J.P. Reaction Wheel Actuation for Improving Planar Biped Walking Efficiency. IEEE Trans. Robot. 2016, 32, 1290–1297. [Google Scholar] [CrossRef]
- Xiong, X.; Ames, A.D. Sequential motion planning for bipedal somersault via flywheel slip and momentum transmission with task space control. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 3510–3517. [Google Scholar]
- Kolvenbach, H.; Hampp, E.; Barton, P.; Zenkl, R.; Hutter, M. Towards jumping locomotion for quadruped robots on the moon. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5459–5466. [Google Scholar]
- Vasilopoulos, V.; Machairas, K.; Papadopoulos, E. Quadruped pronking on compliant terrains using a reaction wheel. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 3590–3595. [Google Scholar]
- Machairas, K.; Papadopoulos, E. On quadruped attitude dynamics and control using reaction wheels and tails. In Proceedings of the 2015 European Control Conference (ECC), Linz, Austria, 15–17 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 753–758. [Google Scholar]
- Gajamohan, M.; Merz, M.; Thommen, I.; D’Andrea, R. The cubli: A cube that can jump up and balance. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3722–3727. [Google Scholar]
- Grimminger, F.; Meduri, A.; Khadiv, M.; Viereck, J.; Wüthrich, M.; Naveau, M.; Berenz, V.; Heim, S.; Widmaier, F.; Flayols, T.; et al. An open torque-controlled modular robot architecture for legged locomotion research. IEEE Robot. Autom. Lett. 2020, 5, 3650–3657. [Google Scholar] [CrossRef]
- Open Dynamic Robot Initiative (ODRI): Max-Planck Institute for Intelligent System, New York University’s Tandon School of Engineering, LAAS/CNRS. Available online: https://open-dynamic-robot-initiative.github.io/ (accessed on 5 December 2022).
- Wieber, P.B.; Tedrake, R.; Kuindersma, S. Modeling and control of legged robots. In Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 1203–1234. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop Open Source Softw, Kobe, Japan, 12–17 May 2009; Volume 5, p. 5. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for gazebo, an open-source multi-robot simulator. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; IEEE: Piscataway, NJ, USA, 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Jeon, S.H.; Kim, S.; Kim, D. Real-time Optimal Landing Control of the MIT Mini Cheetah. arXiv 2021, arXiv:2110.02799. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| r | ||
| R | ||
| h | ||
| m | ||
| Parameter | Value |
|---|---|
| Step size | |
| Real time update rate | 250 |
| Physics engine | Open Dynamics Engine (ODE) |
| Solver | Quick (Projected Gauss-Seidel method) |
| Iterations | 50 |
| Successive Over Relaxation parameter | |
| Rescaling Moment of Inertia | no |
| Friction model | Pyramid |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Roscia, F.; Cumerlotti, A.; Del Prete, A.; Semini, C.; Focchi, M. Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots. Sensors 2023, 23, 1234. https://doi.org/10.3390/s23031234
Roscia F, Cumerlotti A, Del Prete A, Semini C, Focchi M. Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots. Sensors. 2023; 23(3):1234. https://doi.org/10.3390/s23031234
Chicago/Turabian StyleRoscia, Francesco, Andrea Cumerlotti, Andrea Del Prete, Claudio Semini, and Michele Focchi. 2023. "Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots" Sensors 23, no. 3: 1234. https://doi.org/10.3390/s23031234
APA StyleRoscia, F., Cumerlotti, A., Del Prete, A., Semini, C., & Focchi, M. (2023). Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots. Sensors, 23(3), 1234. https://doi.org/10.3390/s23031234