
Digital Control and Demodulation Algorithm for Compact Open-Loop Fiber-Optic Gyroscope

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Demodulation and Control Algorithm
2.1. Demodulation Algorithm
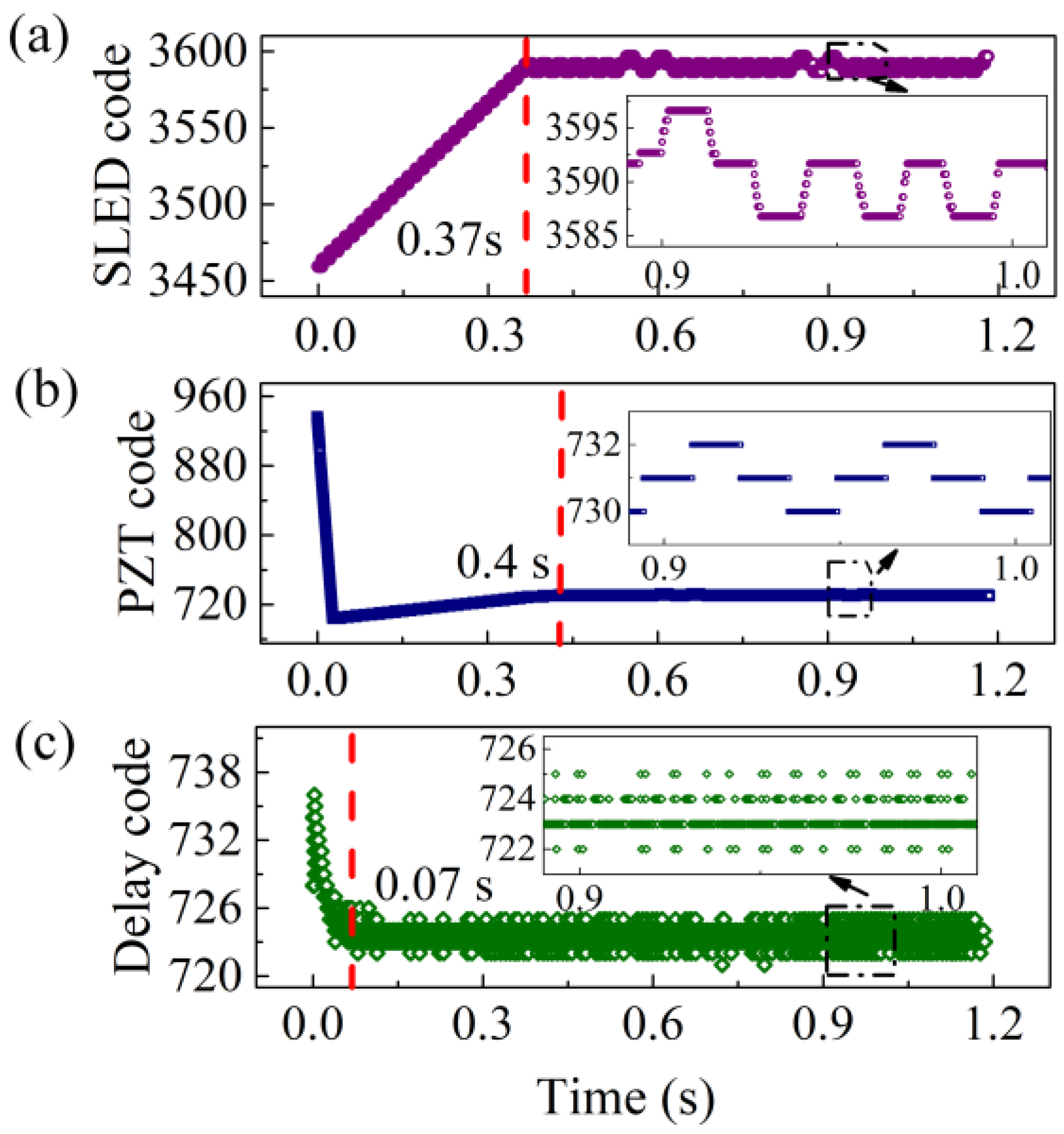
2.2. Control of the Synchronous Sampling Delay
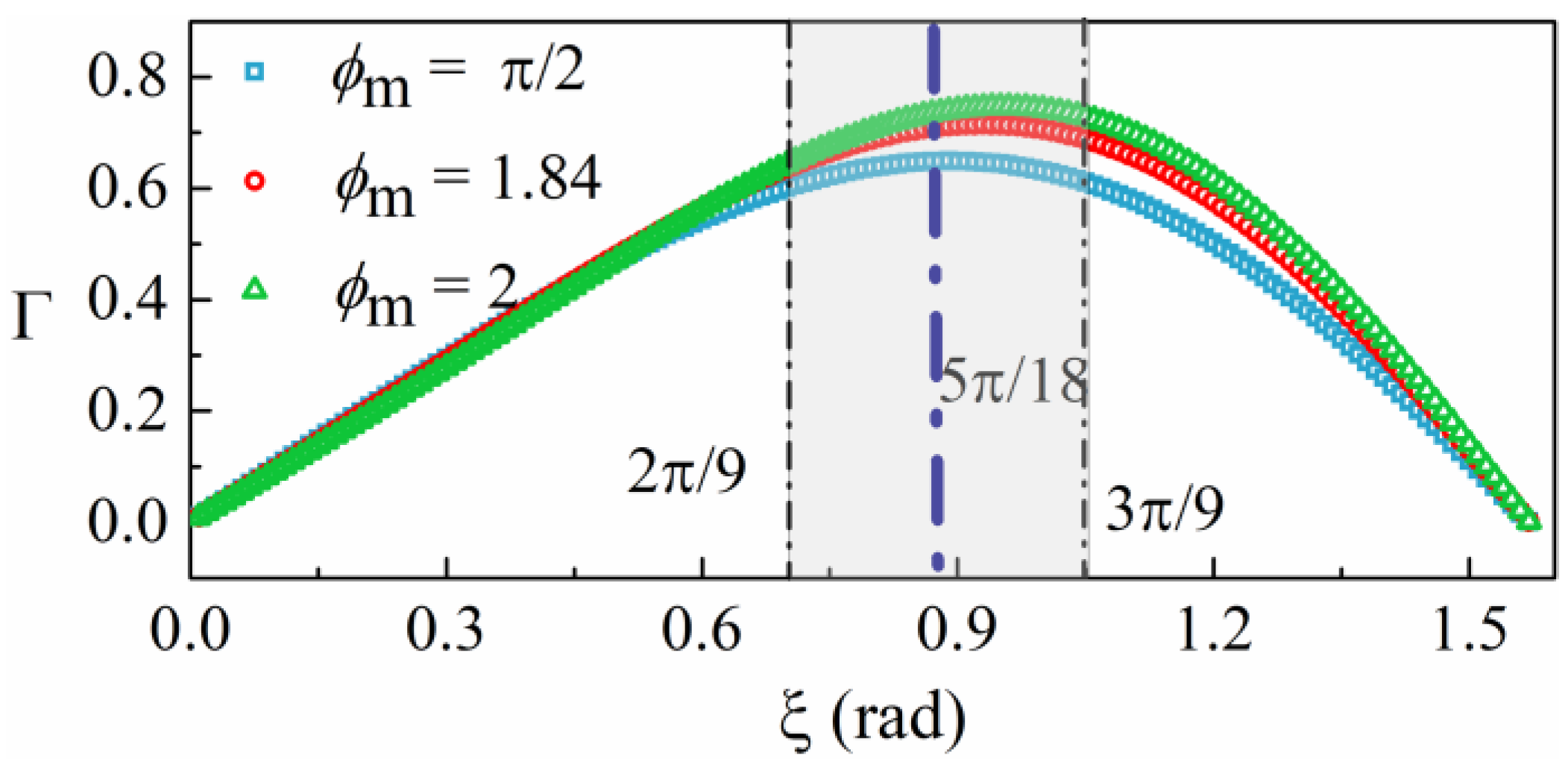
2.3. Control of the Modulation Amplitude
2.4. Control of Optical Intensity
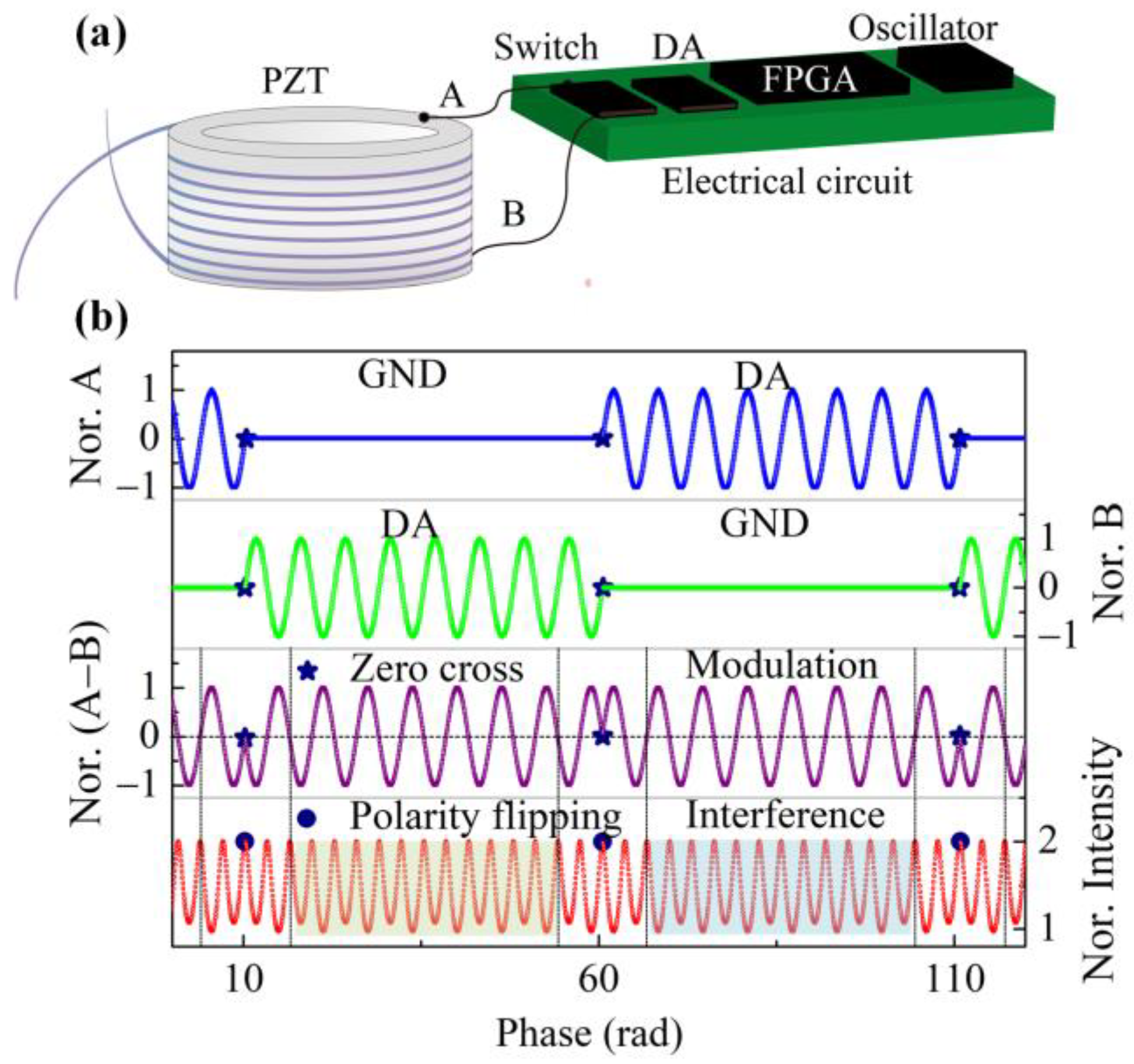
2.5. Suppression of the Bias with a Periodic Flip of Modulation
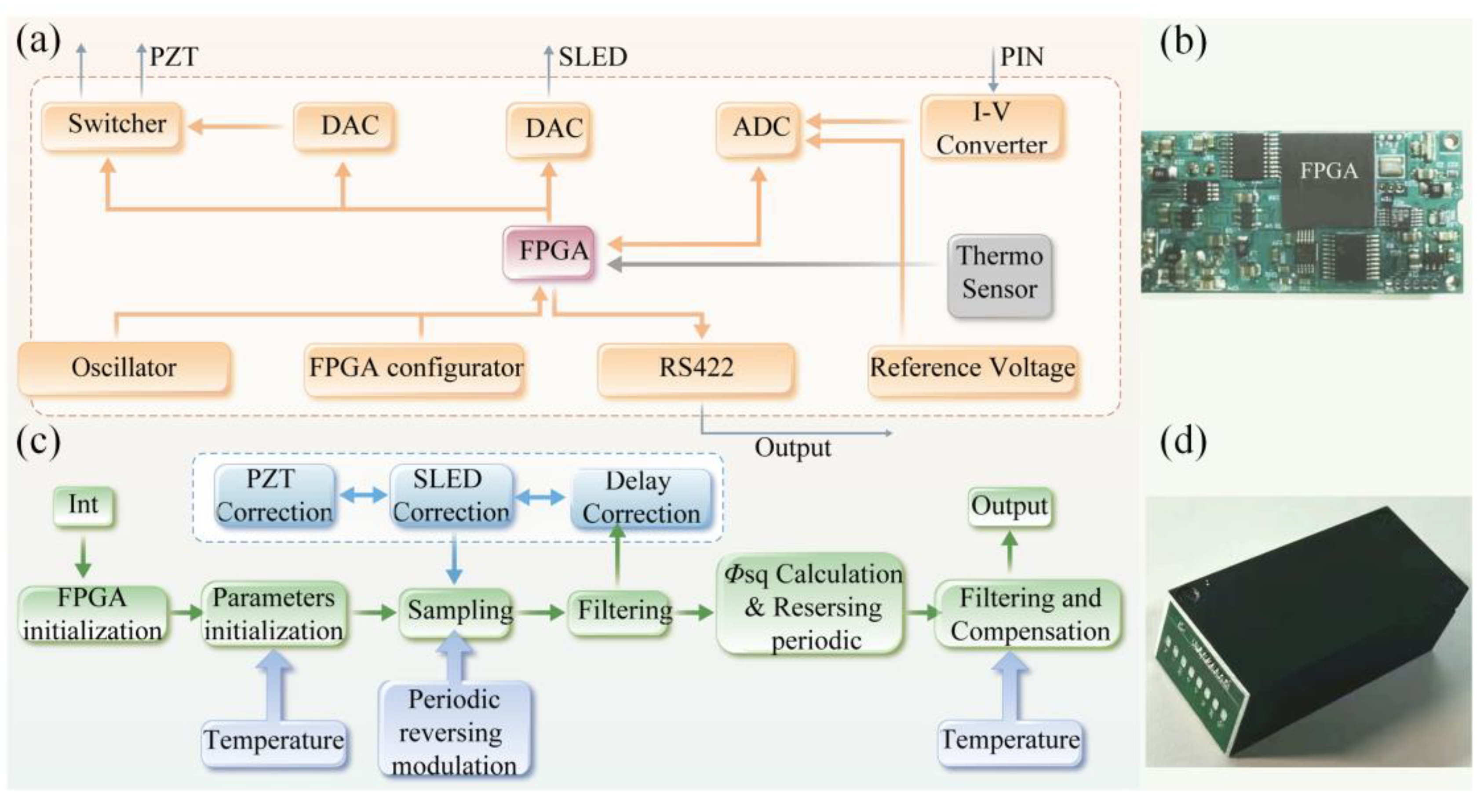
3. Software, Hardware Implementation, and System Construction
4. Determinations of Gyroscope Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Clivati, C.; Calonico, D.; Costanzo, G.A.; Mura, A.; Pizzocaro, M.; Levi, F. Large-area fiber-optic gyroscope on a multiplexed fiber network. Opt. Lett. 2013, 38, 1092–1094. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yao, X.S.; Xuan, H.F.; Chen, X.J.; Zou, H.H.; Liu, X.; Zhao, X. Polarimetry fiber optic gyroscope. Opt. Express 2019, 27, 19984–19995. [Google Scholar] [CrossRef] [PubMed]
- Jin, J.; He, J.; Song, N.; Ma, K.; Kong, L. A compact four-axis interferometric fiber optic gyroscope based on multiplexing for space application. J. Light. Technol. 2020, 38, 6655–6663. [Google Scholar] [CrossRef]
- Udd, E.; Digonnet, M.J.F. Design and Development of Fiber Optic Gyroscopes; SPIE Press: Washington, DC, USA, 2019; pp. 35–50. [Google Scholar]
- KVH Industries Inc. Guide to comparing gyro and IMU technologies-micro-electro-mechanical systems and fiber optic gyros. KVH White Pap. 2014, 3–5. [Google Scholar]
- Zhang, D.; Liang, C.; Li, N. A novel approach to double the sensitivity of polarization maintaining interferometric fiber optic gyroscope. Sensors 2020, 20, 3762. [Google Scholar] [CrossRef]
- Wu, W.; Zhou, K.; Lu, C.; Xian, T. Open-loop fiber-optic gyroscope with a double sensitivity employing a polarization splitter and Faraday rotator mirror. Opt. Lett. 2018, 43, 5861–5864. [Google Scholar] [CrossRef]
- Medjadba, H.; Lecler, S.; Simohamed, L.M.; Fontaine, J.; Kiefer, R. An optimal open-loop multimode fiber gyroscope for rate-grade performance applications. Opt. Fiber Technol. 2011, 17, 546–553. [Google Scholar] [CrossRef]
- Wang, X.; He, C.; Wang, Z. Method for suppressing the bias drift of interferometric all-fiber optic gyroscopes. Opt. Lett. 2011, 36, 1191–1193. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, C.; Wang, X.; Wang, Z. All-digital signal-processing open-loop fiber-optic gyroscope with enlarged dynamic range. Opt. Lett. 2013, 38, 5422–5425. [Google Scholar] [CrossRef]
- Bacurau, R.M.; Spengler, A.W.; Dante, A.; Morais, F.J.O.; Duarte, L.F.C.; Ribeiro, L.E.B.; Ferreira, E.C. Technique for suppressing the electronic offset drift of interferometric open-loop fiber optic gyroscopes. Opt. Lett. 2016, 41, 5186–5189. [Google Scholar] [CrossRef]
- Lu, C.; Zhou, K. A low-cost all-digital demodulation method for fiber-optic interferometric sensors. Meas Sci Technol. 2018, 29, 105103. [Google Scholar] [CrossRef]
- Gronau, Y.; Tur, M. Digital signal processing for an open-loop fiber-optic gyroscope. Appl Opt. 1995, 34, 5849–5853. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lefèvre, H.C. The fiber-optic gyroscope: Challenges to become the ultimate rotation-sensing technology. Opt. Fiber Technol. 2013, 19(6), 828–838. [Google Scholar] [CrossRef]
- Bergh, R.A. All-single-mode fiber-optic gyroscope with long-term stability. Opt. Lett. 1981, 6, 502–504. [Google Scholar] [CrossRef] [PubMed]
- Song, N.; Cai, W.; Song, J.; Jin, J.; Wu, C. Structure optimization of small-diameter polarization-maintaining photonic crystal fiber for mini coil of spaceborne miniature fiber-optic gyroscope. Appl. Opt. 2015, 54, 9831–9838. [Google Scholar] [CrossRef] [PubMed]
- Chamoun, J.N.; Digonnet, M.J.F. Noise and bias error due to polarization coupling in a fiber optic gyroscope. J. Light. Technol. 2015, 33, 2839–2847. [Google Scholar] [CrossRef]
- Ulrich, R. Fiber-optic rotation sensing with low drift. Opt. Lett. 1980, 5, 173–175. [Google Scholar] [CrossRef] [PubMed]
- Li, Y.; Ben, F.; Luo, R.; Peng, C.; Li, Z. Excess relative intensity noise suppression in depolarized interferometric fiber optic gyroscopes. Opt. Commun. 2019, 440, 83–88. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Y.; Li, C.; Wang, Y.; Wang, Z. A new open-loop fiber optic gyro error compensation method based on angular velocity error modeling. Sensors 2015, 15, 4899–4912. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Dong, L.; Li, H.; Zhang, J.; Wang, X.; Zhang, H. An analog readout circuit with a noise-reduction input buffer for MEMS microphone. IEEE Trans. Circuits Syst. 2022, 69, 438–443. [Google Scholar] [CrossRef]
- Bednar, T.; Babusiak, B.; Labuda, M.; Smetana, M.; Borik, S. Common-mode voltage reduction in capacitive sensing of biosignal using capacitive grounding and DRL electrode. Sensors 2021, 21, 2568. [Google Scholar] [CrossRef] [PubMed]
- Napoli, J.; Ward, R. Two decades of KVH fiber optic gyro technology: From large, low performance FOGs to compact, precise FOGs and FOG-based inertial systems. DGON ISS 2016, 1–19. [Google Scholar]
- Din, H.; Iqbal, F.; Park, J.; Lee, B. Bias-repeatability analysis of vacuum-packaged 3-Axis MEMS gyroscope using oven-controlled system. Sensors 2023, 23, 256. [Google Scholar] [CrossRef] [PubMed]
- Jiang, B.; Hou, Y.; Wang, H.; Gan, X.; Li, A.; Hao, Z.; Zhou, K.; Zhang, L.; Zhao, J. Few-layer graphene integrated tilted fiber grating for all-optical switching. J. Light. Technol. 2020, 39, 1477–1482. [Google Scholar] [CrossRef]
- Jiang, B.; Zhao, J. Nanomaterial-functionalized tilted fiber gratings for optical modulation and sensing. J. Light. Technol. 2022, 1, 1558–2213. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, C.; Gao, S.; Wang, T.; Lin, T.; Li, X. Application of fast dynamic Allan variance for the characterization of FOGs-based measurement while drilling. Sensors 2016, 16, 2078. [Google Scholar] [CrossRef] [Green Version]
- Ren, W.; Luo, Y.; He, Q.; Zhou, X.; Deng, C.; Mao, Y.; Ren, G. Stabilization control of electro-optical tracking system with fiber-optic gyroscope based on modified smith predictor control scheme. IEEE Sens. Lett. 2018, 18, 8172–8178. [Google Scholar] [CrossRef]
- Passaro, V.M.N.; Cuccovillo, A.; Vaiani, L.; De Carlo, M.; Campanella, C.E. Gyroscope technology and applications: A review in the industrial perspective. Sensors 2017, 17, 2284. [Google Scholar] [CrossRef] [Green Version]
- Vivacqua, R.; Vassallo, R.; Martins, F. A low cost sensors approach for accurate vehicle localization and autonomous driving application. Sensors 2017, 17, 2359. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Huang, Z.; Mao, Y.; Jiang, B.; Zhao, J. Digital Control and Demodulation Algorithm for Compact Open-Loop Fiber-Optic Gyroscope. Sensors 2023, 23, 1473. https://doi.org/10.3390/s23031473
Chen L, Huang Z, Mao Y, Jiang B, Zhao J. Digital Control and Demodulation Algorithm for Compact Open-Loop Fiber-Optic Gyroscope. Sensors. 2023; 23(3):1473. https://doi.org/10.3390/s23031473
Chicago/Turabian StyleChen, Lin, Zhao Huang, Yuzheng Mao, Biqiang Jiang, and Jianlin Zhao. 2023. "Digital Control and Demodulation Algorithm for Compact Open-Loop Fiber-Optic Gyroscope" Sensors 23, no. 3: 1473. https://doi.org/10.3390/s23031473