
Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End



Abstract
:1. Introduction
2. Hardware and Methods Overview
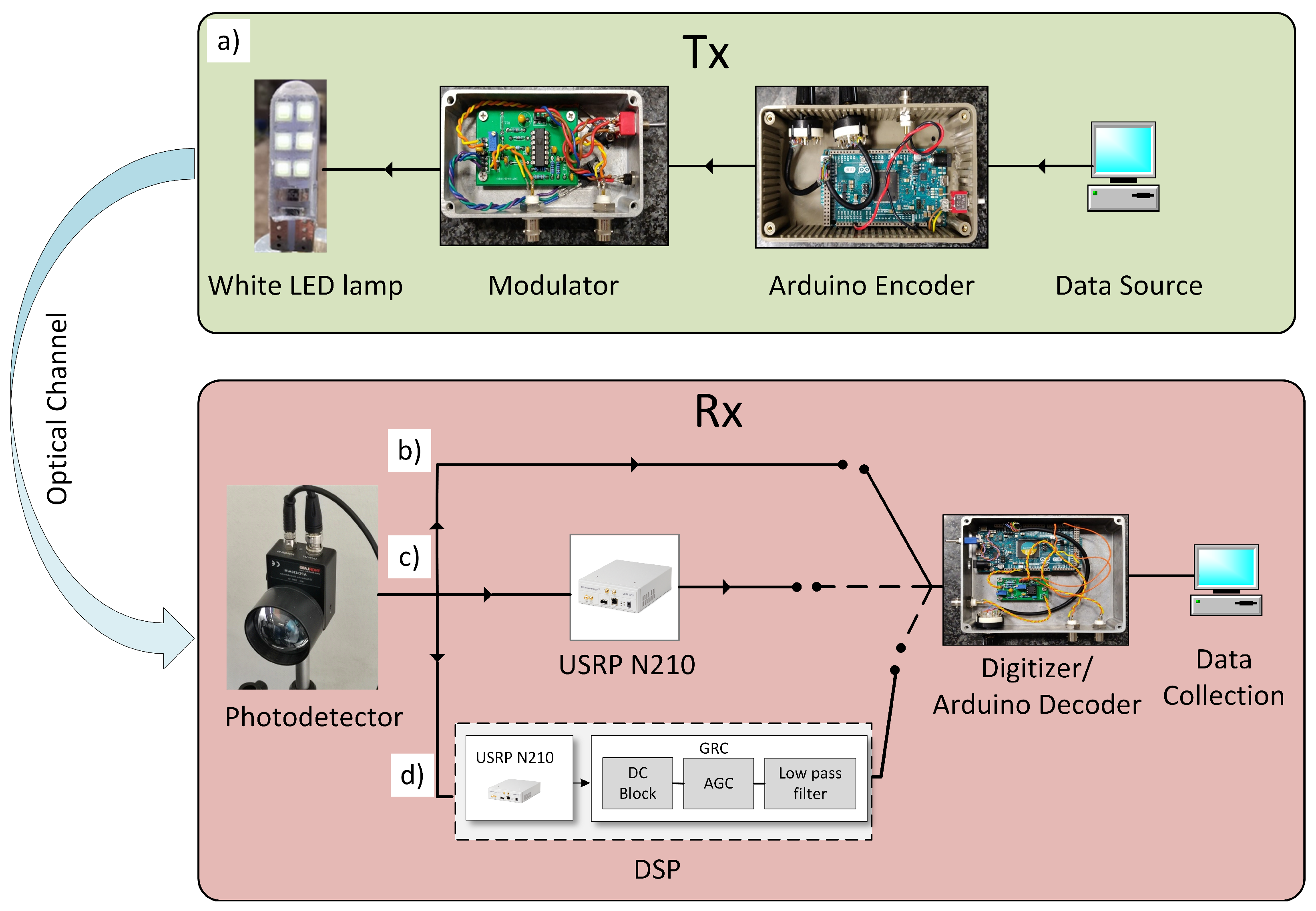
2.1. Hardware and Experimental Setup
2.2. RX Stage Configurations
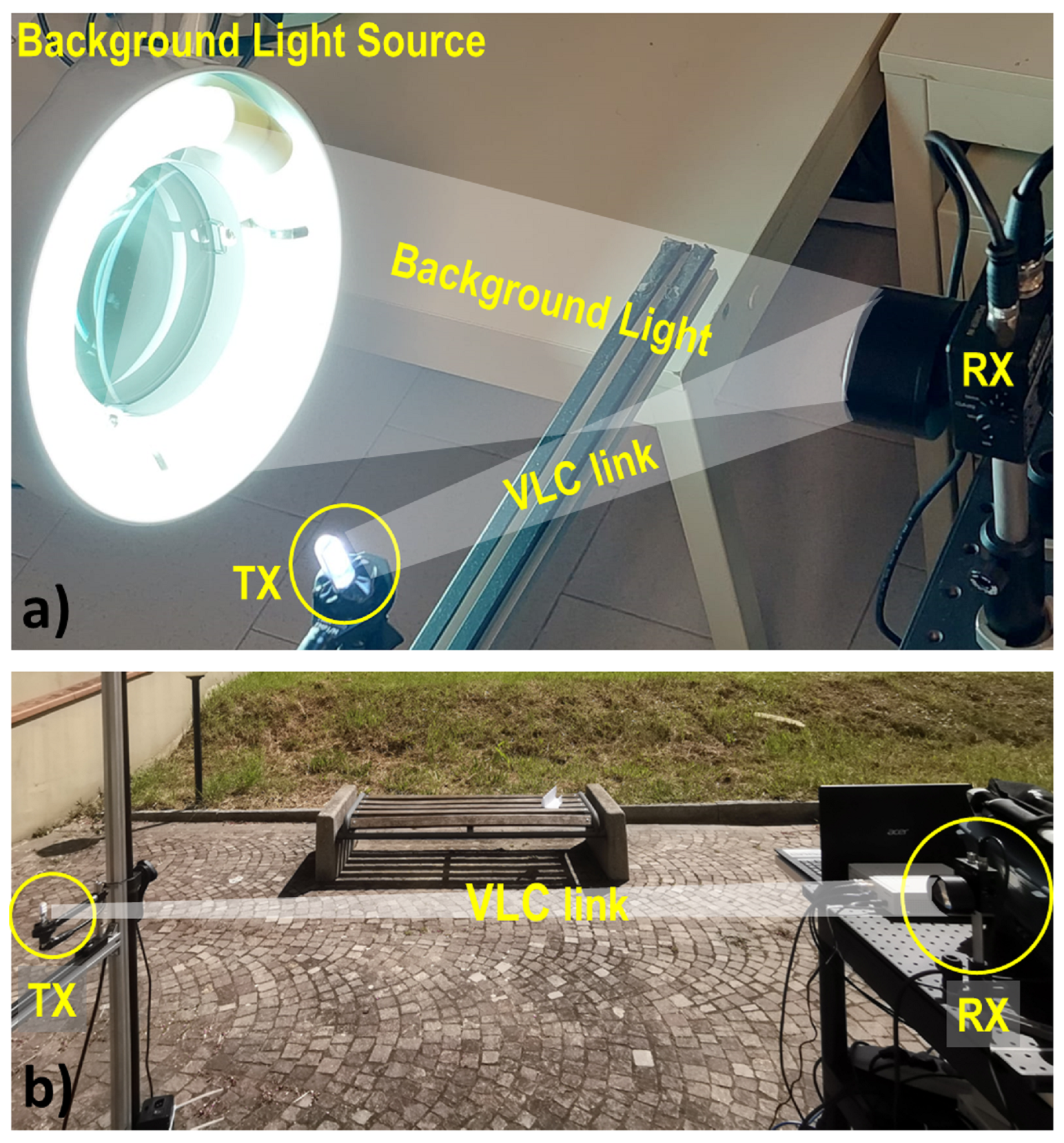
2.3. Experimental Procedure and Scenarios
3. Model and Data Analysis
4. Experimental Campaign and Discussion of Results
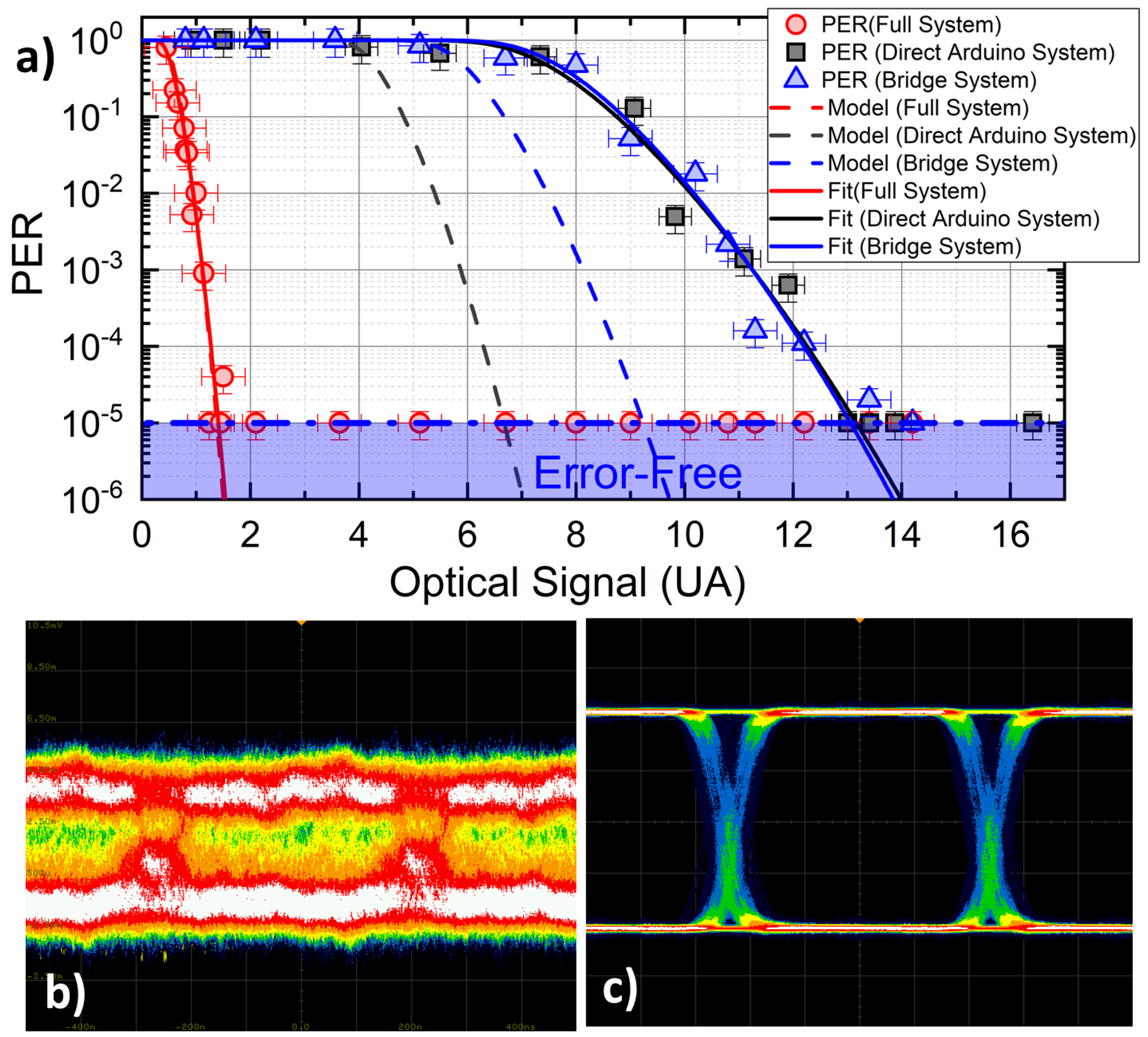
4.1. Comparison of the Three Systems: Indoor Tests
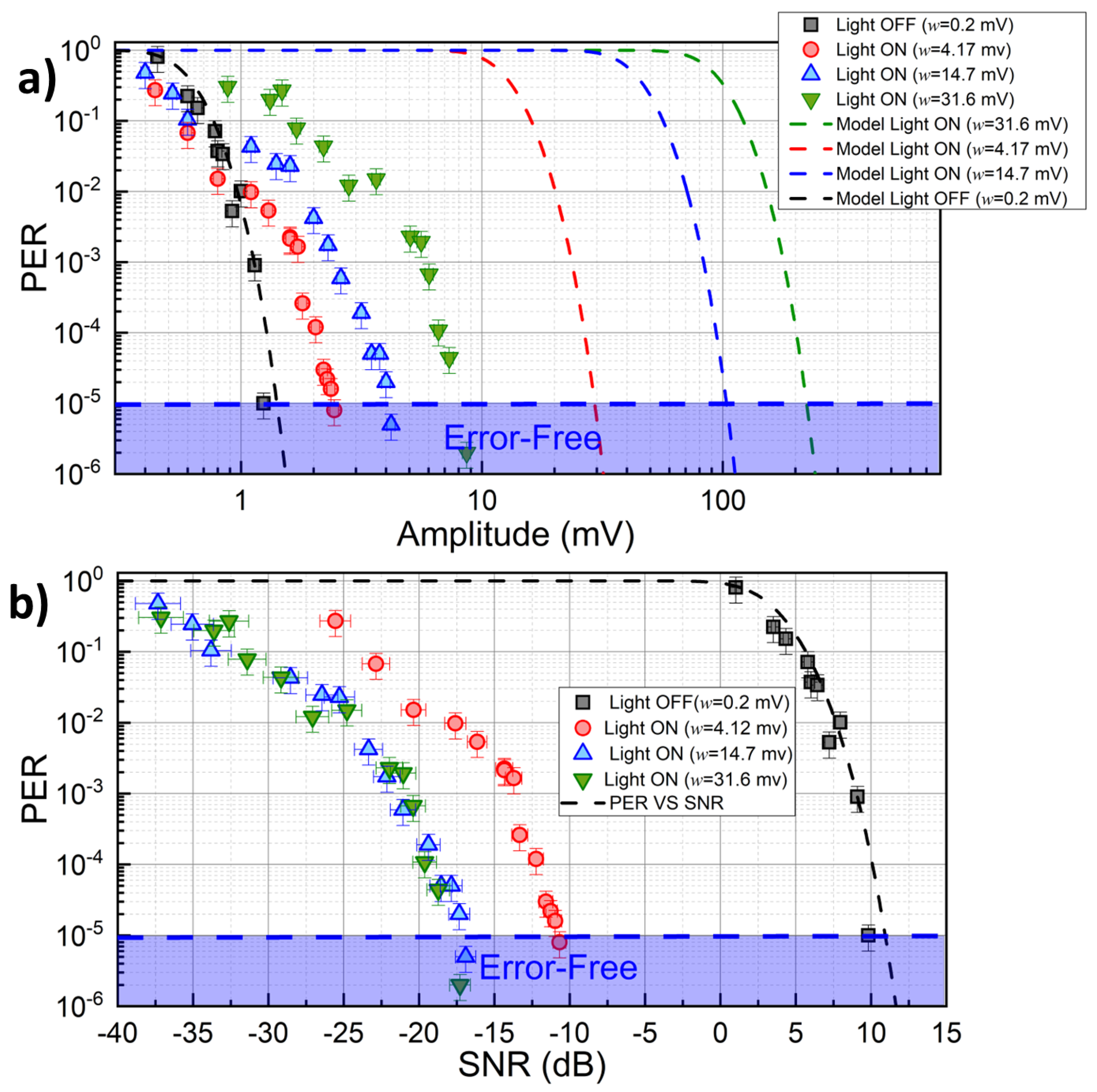
4.2. Rejection of Artificial Light Contribution
4.3. Outdoor Tests
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, L.; Hu, R.Q.; Wang, J.; Xu, P.; Qian, Y. Applying VLC in 5G Networks: Architectures and Key Technologies. IEEE Netw. 2016, 30, 77–83. [Google Scholar] [CrossRef]
- Marabissi, D.; Mucchi, L.; Caputo, S.; Nizzi, F.; Pecorella, T.; Fantacci, R.; Nawaz, T.; Seminara, M.; Catani, J. Experimental Measurements of a Joint 5G-VLC Communication for Future Vehicular Networks. J. Sens. Actuator Netw. 2020, 9, 32. [Google Scholar] [CrossRef]
- Jovicic, A.; Li, J.; Richardson, T. Visible light communication: Opportunities, challenges and the path to market. IEEE Commun. Mag. 2013, 51, 26–32. [Google Scholar] [CrossRef]
- Memedi, A.; Dressler, F. Vehicular Visible Light Communications: A Survey. IEEE Commun. Surv. Tutor. 2021, 23, 161–181. [Google Scholar] [CrossRef]
- Haas, H.; Yin, L.; Wang, Y.; Chen, C. What is LiFi? J. Light. Technol. 2016, 34, 1533–1544. [Google Scholar] [CrossRef]
- Elgala, H.; Mesleh, R.; Haas, H. Indoor optical wireless communication: Potential and state-of-the-art. IEEE Commun. Mag. 2011, 49, 56–62. [Google Scholar] [CrossRef]
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef]
- Yan, K.; Li, Z.; Cheng, M.; Wu, H.C. QoS Analysis and Signal Characteristics for Short-Range Visible-Light Communications. IEEE Trans. Veh. Technol. 2021, 70, 6726–6734. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, X.; Shi, J.; Wang, Y.q.; Chi, N. Long-range high-speed visible light communication system over 100-m outdoor transmission utilizing receiver diversity technology. Opt. Eng. 2016, 55, 056104. [Google Scholar] [CrossRef]
- Umair, M.A.; Seminara, M.; Meucci, M.; Fattori, M.; Bruni, F.; Brovelli, S.; Meinardi, F.; Catani, J. Long-Range Optical Wireless Communication System Based on a Large-Area, Q-Dots Fluorescent Antenna. Laser Photonics Rev. 2022, 2200575. [Google Scholar] [CrossRef]
- Irfan, M.; Habib, U.; Muhammad, F.; Ali, F.; Alwadie, A.S.; Ullah, S.; Glowacz, A.; Glowacz, W. Optical-Interference Mitigation in Visible Light Communication for Intelligent Transport Systems Applications. Energies 2020, 13, 5064. [Google Scholar] [CrossRef]
- Tokgoz, S.C.; Anous, N.; Yarkan, S.; Khalil, D.; Qaraqe, K.A. Performance Improvement of White LED-Based VLC Systems Using Blue and Flattening Filters. In Proceedings of the 2019 International Conference on Advanced Communication Technologies and Networking (CommNet), Rabat, Morocco, 12–14 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Khalid, A.M.; Cossu, G.; Corsini, R.; Choudhury, P.; Ciaramella, E. 1-Gb/s Transmission over a Phosphorescent White LED by Using Rate-Adaptive Discrete Multitone Modulation. IEEE Photonics J. 2012, 4, 1465–1473. [Google Scholar] [CrossRef]
- Wang, S.W.; Chen, F.; Liang, L.; He, S.; Wang, Y.; Chen, X.; Lu, W. A high-performance blue filter for a white-led-based visible light communication system. IEEE Wirel. Commun. 2015, 22, 61–67. [Google Scholar] [CrossRef]
- Sung, J.Y.; Chow, C.W.; Yeh, C.H. Is blue optical filter necessary in high speed phosphor-based white light LED visible light communications? Opt. Express 2014, 22, 20646–20651. [Google Scholar] [CrossRef] [PubMed]
- Fuada, S.; Putra, A.P.; Aska, Y.; Adiono, T. A First Approach to Design Mobility Function and Noise Filter in VLC System Utilizing Low-cost Analog Circuits. Int. J. Recent Contrib. Eng. Sci. IT (iJES) 2017, 5, 14–30. [Google Scholar] [CrossRef]
- Seminara, M.; Nawaz, T.; Caputo, S.; Mucchi, L.; Catani, J. Characterization of Field of View in Visible Light Communication Systems for Intelligent Transportation Systems. IEEE Photonics J. 2020, 12, 1–16. [Google Scholar] [CrossRef]
- Nguyen, H.; Jang, Y.M. Design of MIMO C-OOK using Matched filter for Optical Camera Communication System. In Proceedings of the 2021 International Conference on Artificial Intelligence in Information and Communication (ICAIIC), Jeju Island, Republic of Korea, 13–16 April 2021; pp. 474–476. [Google Scholar] [CrossRef]
- Béchadergue, B.; Guan, H.; Chassagne, L.; Tohmé, S.; Franchineau, J.L. Visible Light Communication System for Platooning Applications. Available online: https://hal.science/hal-01378185/ (accessed on 9 October 2016).
- Căilean, A.M.; Dimian, M.; Popa, V. Noise-Adaptive Visible Light Communications Receiver for Automotive Applications: A Step toward Self-Awareness. Sensors 2020, 20, 3764. [Google Scholar] [CrossRef]
- Căilean, A.M.; Cagneau, B.; Chassagne, L.; Dimian, M.; Popa, V. Novel Receiver Sensor for Visible Light Communications in Automotive Applications. IEEE Sens. J. 2015, 15, 4632–4639. [Google Scholar] [CrossRef]
- Machado-Fernández, J.A.R.A. Software Defined Radio: Basic Principles and Applications. Rev. Fac. IngenierÃa 2015, 24, 79–96. [Google Scholar] [CrossRef]
- Voudoukis, N. Inverse square law for light and radiation: A unifying educational approach. Eur. J. Eng. Res. Sci. 2017, 2, 23–27. [Google Scholar] [CrossRef]
- Macedo, D.F.; Guedes, D.; Vieira, L.F.M.; Vieira, M.A.M.; Nogueira, M. Programmable Networks—From Software-Defined Radio to Software-Defined Networking. IEEE Commun. Surv. Tutor. 2015, 17, 1102–1125. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Liang, Y.; Guo, Z.; Ni, L.M. Software-Defined Architectures and Technologies for Underwater Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2018, 20, 2855–2888. [Google Scholar] [CrossRef]
- Martinek, R.; Danys, L.; Jaros, R. Visible Light Communication System Based on Software Defined Radio: Performance Study of Intelligent Transportation and Indoor Applications. Electronics 2019, 8, 433. [Google Scholar] [CrossRef]
- Hussain, W.; Ugurdag, H.F.; Uysal, M. Software defined VLC system: Implementation and performance evaluation. In Proceedings of the 2015 4th International Workshop on Optical Wireless Communications (IWOW), Istanbul, Turkey, 7–8 September 2015; pp. 117–121. [Google Scholar] [CrossRef]
- Meucci, M.; Seminara, M.; Nawaz, T.; Caputo, S.; Mucchi, L.; Catani, J. Bidirectional Vehicle-to-Vehicle Communication System Based on VLC: Outdoor Tests and Performance Analysis. IEEE Trans. Intell. Transp. Syst. 2021, 23, 1–11. [Google Scholar] [CrossRef]
- Ettus Reserach Universal Software Defined Radio. 2022. Available online: www.ettus.com (accessed on 24 December 2022).
- Daughter Boards Developed by Ettus Reserach. 2022. Available online: www.ettus.com (accessed on 24 December 2022).
- Umair, M.A.; Meucci, M.; Catani, J. Experimental Characterization of a New SoftwareDefined Radio-Based DSP Stage for VLC Systems. Optical Wireless Communication Conference. Available online: https://owcc.jakajima.eu/previous-editions/ (accessed on 10 November 2022).
- Open Source GNU Radio the GNU Software Radio Project. 2022. Available online: https://www.gnuradio.org/ (accessed on 10 November 2022).
- Khalili, R.; Salamatian, K. A new analytic approach to evaluation of packet error rate in wireless networks. In Proceedings of the 3rd Annual Communication Networks and Services Research Conference (CNSR’05), Halifax, NS, Canada, 16–18 May 2005; pp. 333–338. [Google Scholar] [CrossRef]
- Hamstra, R.H.; Wendland, P. Noise and Frequency Response of Silicon Photodiode Operational Amplifier Combination. Appl. Opt. 1972, 11, 1539–1547. [Google Scholar] [CrossRef] [PubMed]
- Nawaz, T.; Seminara, M.; Caputo, S.; Mucchi, L.; Cataliotti, F.S.; Catani, J. IEEE 802.15.7-Compliant Ultra-Low Latency Relaying VLC System for Safety-Critical ITS. IEEE Trans. Veh. Technol. 2019, 68, 12040–12051. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Full System | Bridge System | Arduino System | ||||
|---|---|---|---|---|---|---|
| Model | Fit | Model | Fit | Model | Fit | |
| Threshold (mV) | 0 | 0 (fixed) | 3.6 | 3.87 | 2.6 | 3.46 |
| RMS noise w (mV) | 0.14 | 0.15 | 1.0 | 1.63 | 1.0 | 2.38 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umair, M.A.; Meucci, M.; Catani, J. Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End. Sensors 2023, 23, 1594. https://doi.org/10.3390/s23031594
Umair MA, Meucci M, Catani J. Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End. Sensors. 2023; 23(3):1594. https://doi.org/10.3390/s23031594
Chicago/Turabian StyleUmair, Muhammad Ali, Marco Meucci, and Jacopo Catani. 2023. "Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End" Sensors 23, no. 3: 1594. https://doi.org/10.3390/s23031594
APA StyleUmair, M. A., Meucci, M., & Catani, J. (2023). Strong Noise Rejection in VLC Links under Realistic Conditions through a Real-Time SDR Front-End. Sensors, 23(3), 1594. https://doi.org/10.3390/s23031594