

Performance Analysis of Turbo Codes, LDPC Codes, and Polar Codes over an AWGN Channel in the Presence of Inter Symbol Interference



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
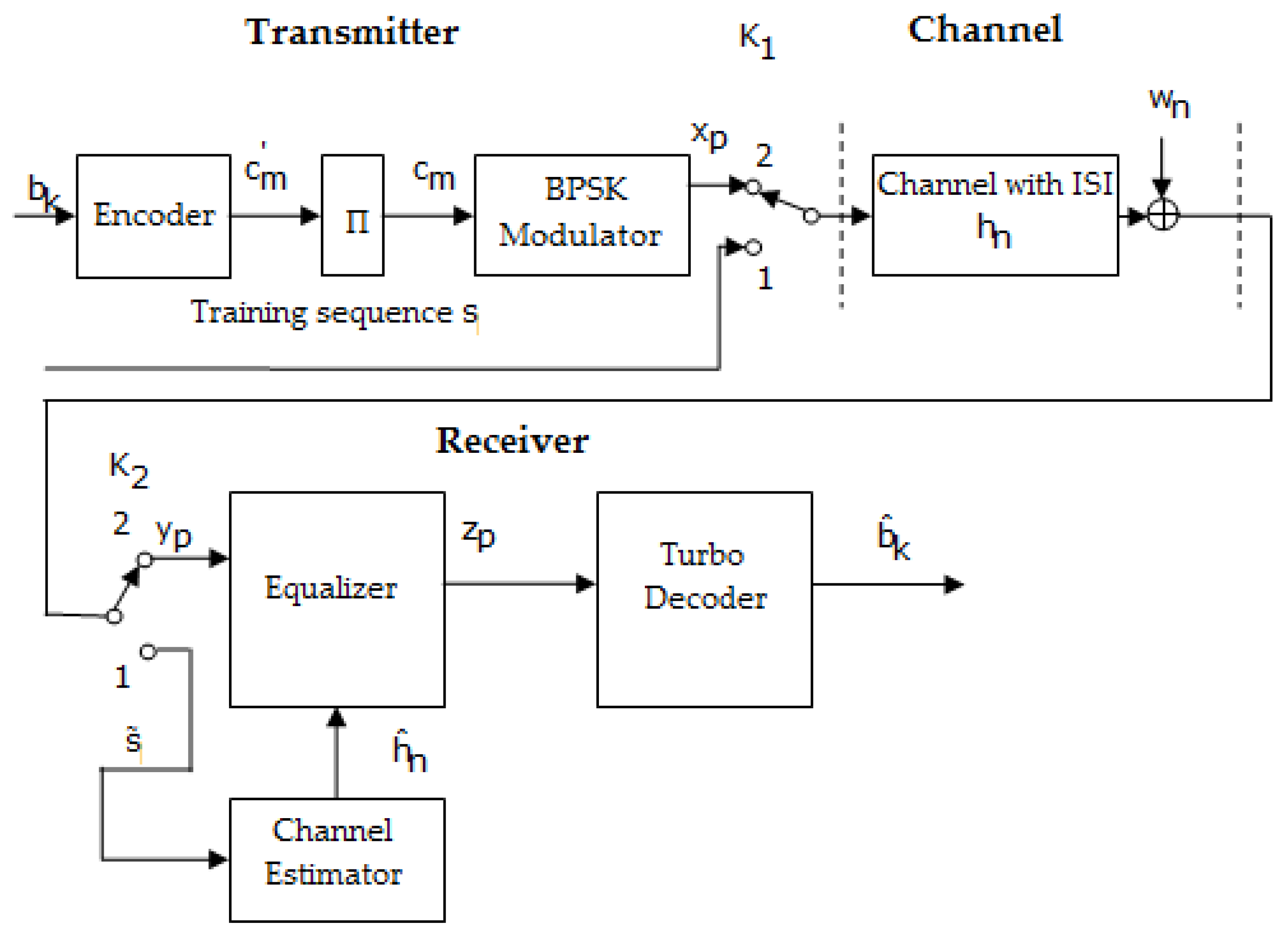
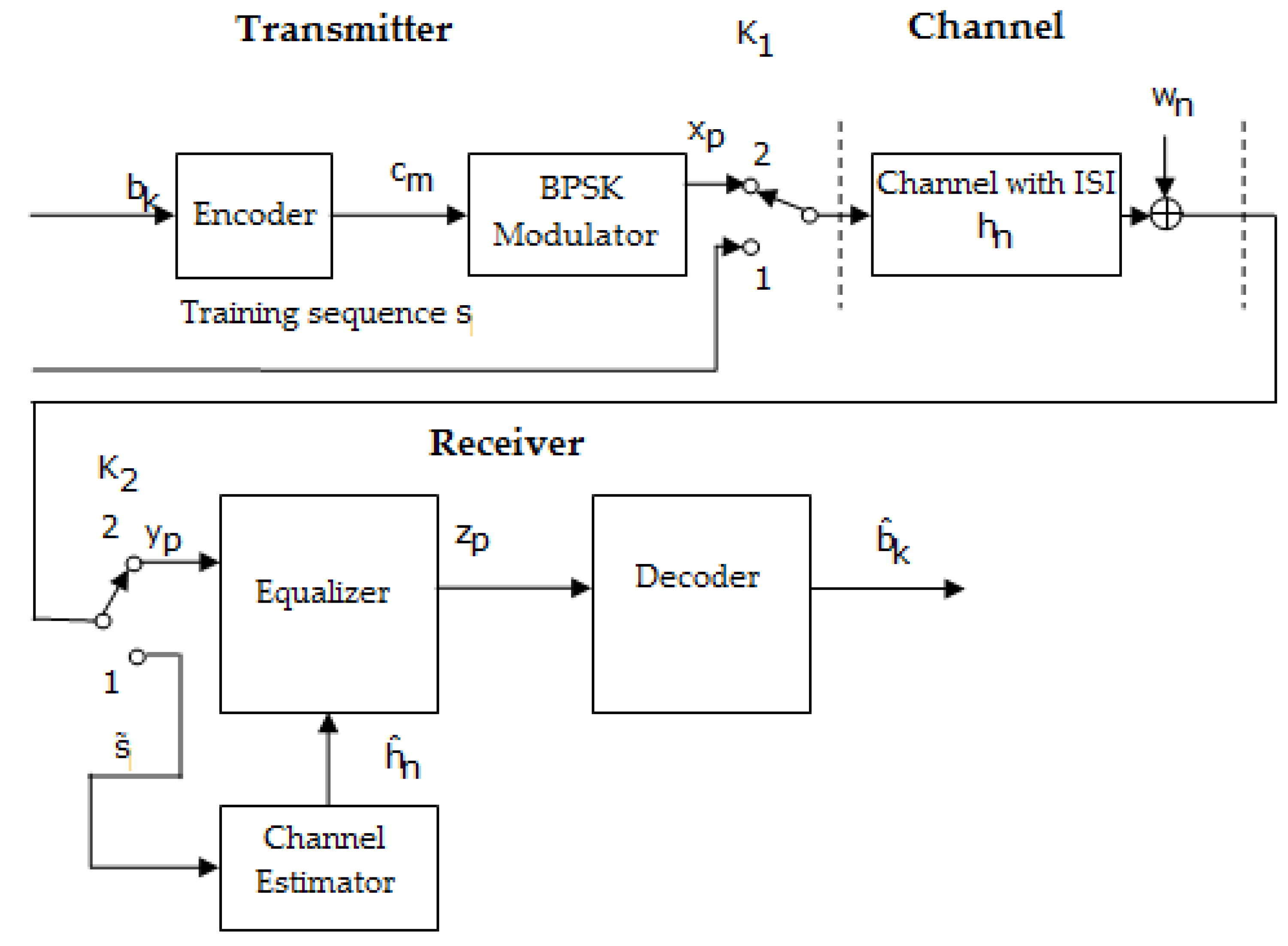
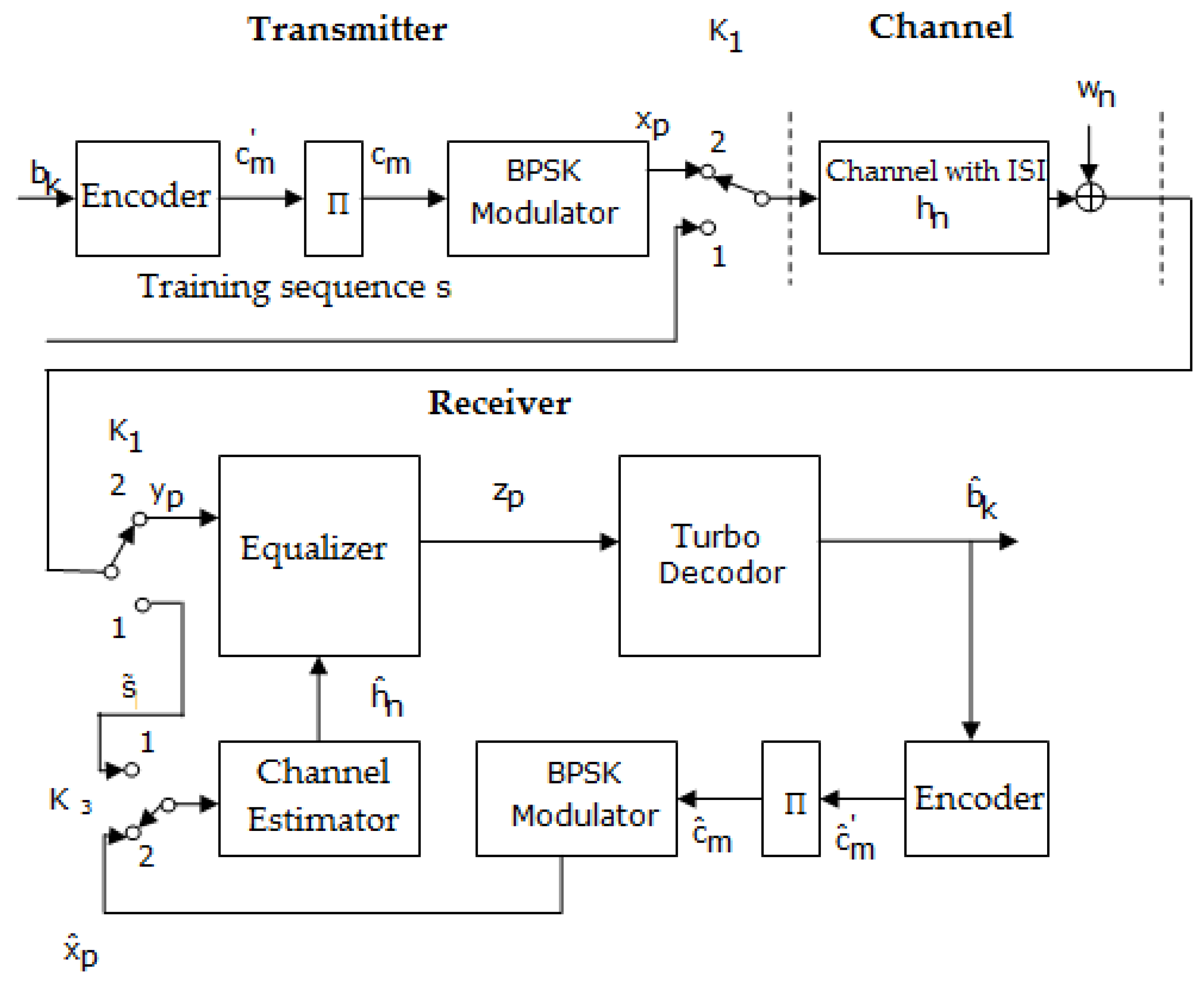
- This paper presents a novel LDPC least square (LS) channel estimator, using the LLR (log-likelihood) fed back from the LDPC decoder to iteratively improve the channel estimation.
- In addition, this paper presents a novel polar least square (LS) channel estimator, achieved based on the sequence obtained at the output of the polar decoder to iteratively improve the channel estimation.
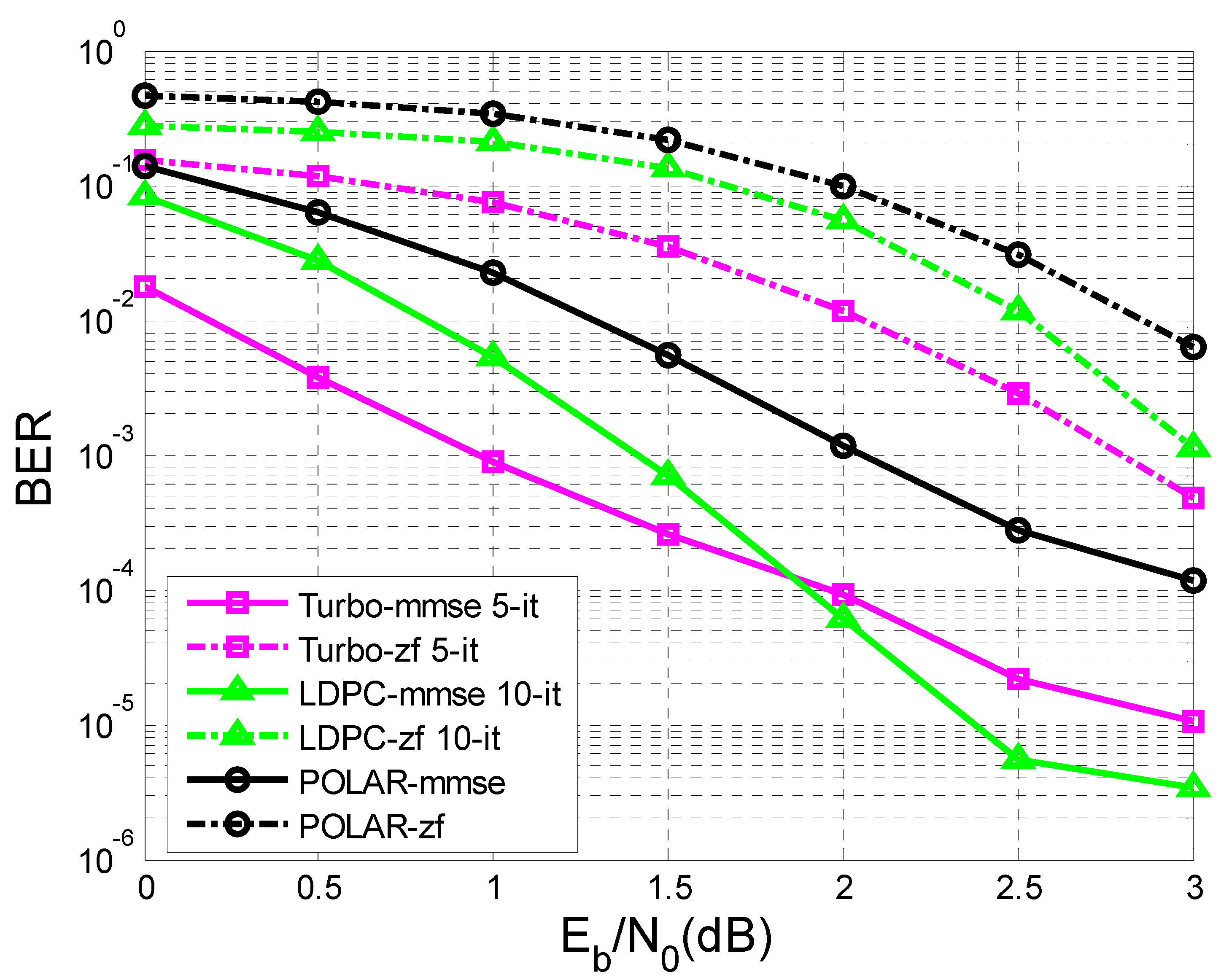
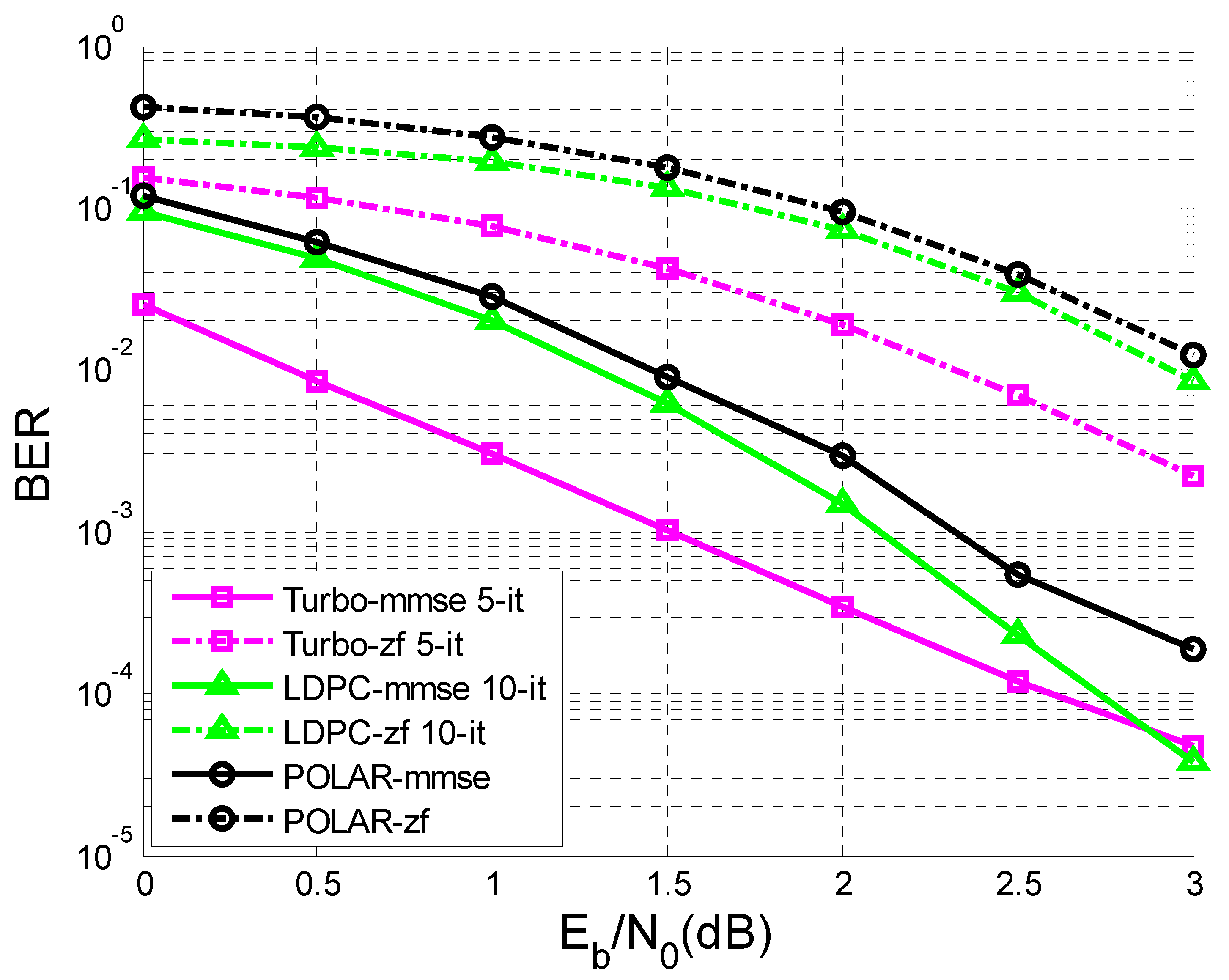
- In the working SNR range, the iterative LS estimation of the channel response to the impulse offers substantial improvements regarding the performance of all three types of codes (LDPC codes, polar codes, and turbo codes) compared to estimation only once, and the LDPC codes seemed to give the best results. Additionally, computer simulation results are presented to confirm this assertion.
2. Related Work
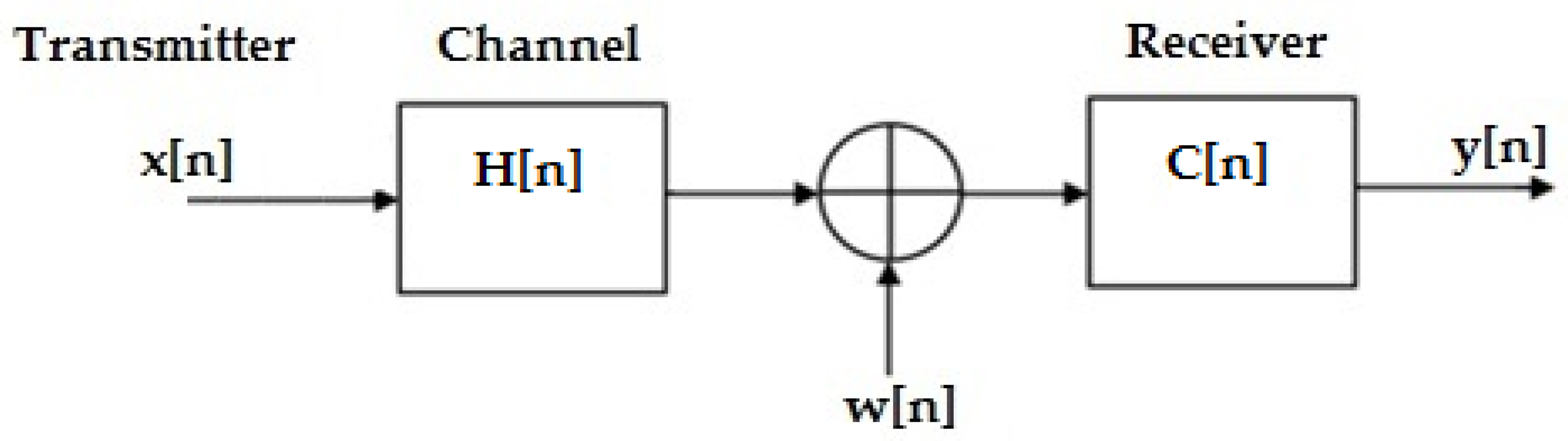
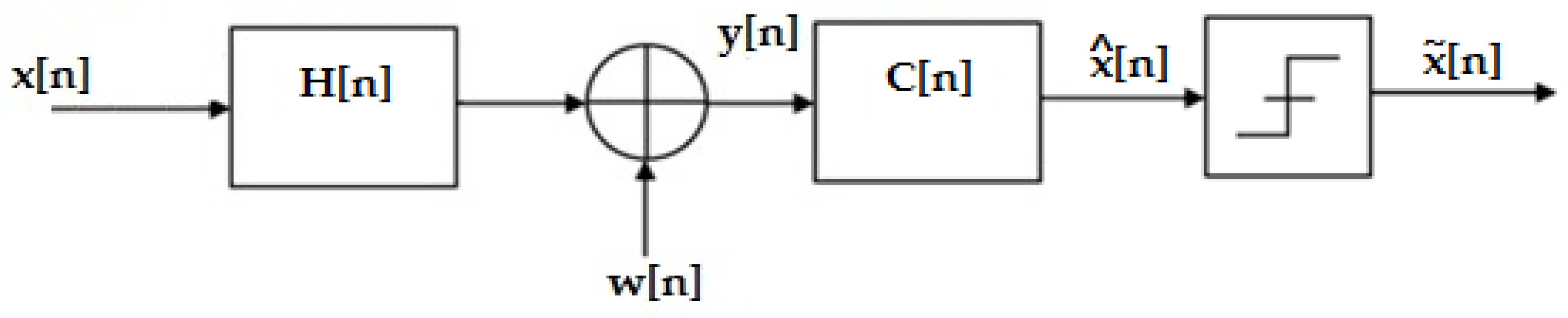
3. Inter Symbol Interference
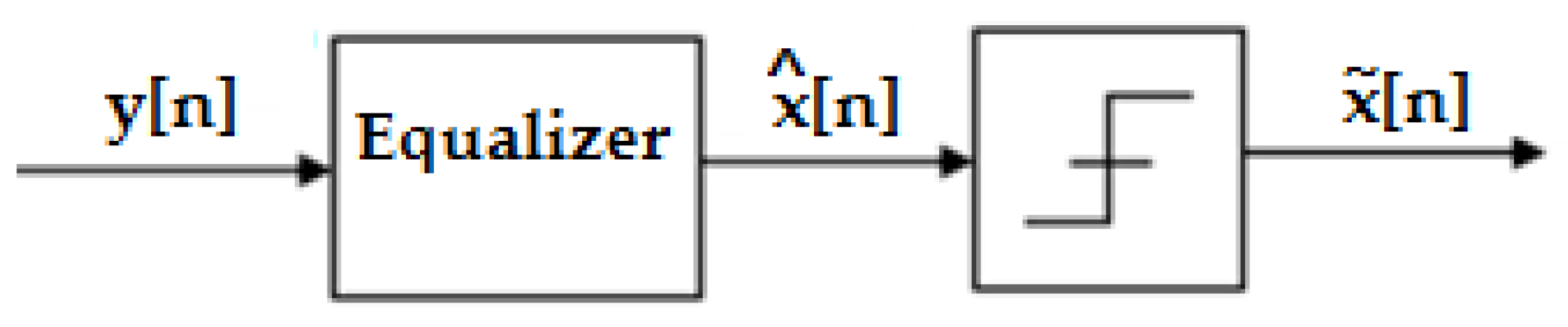
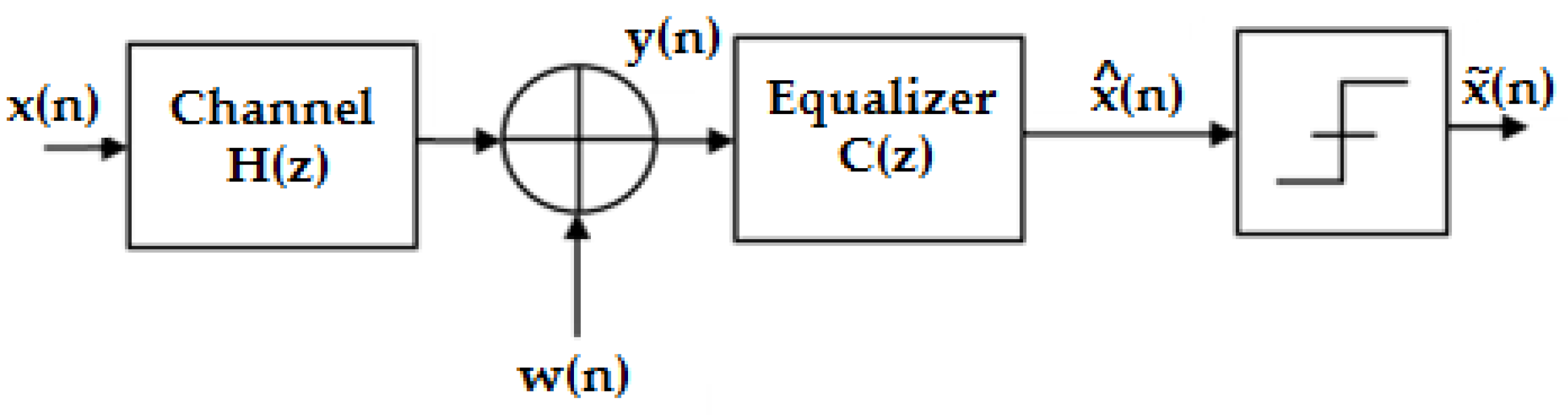
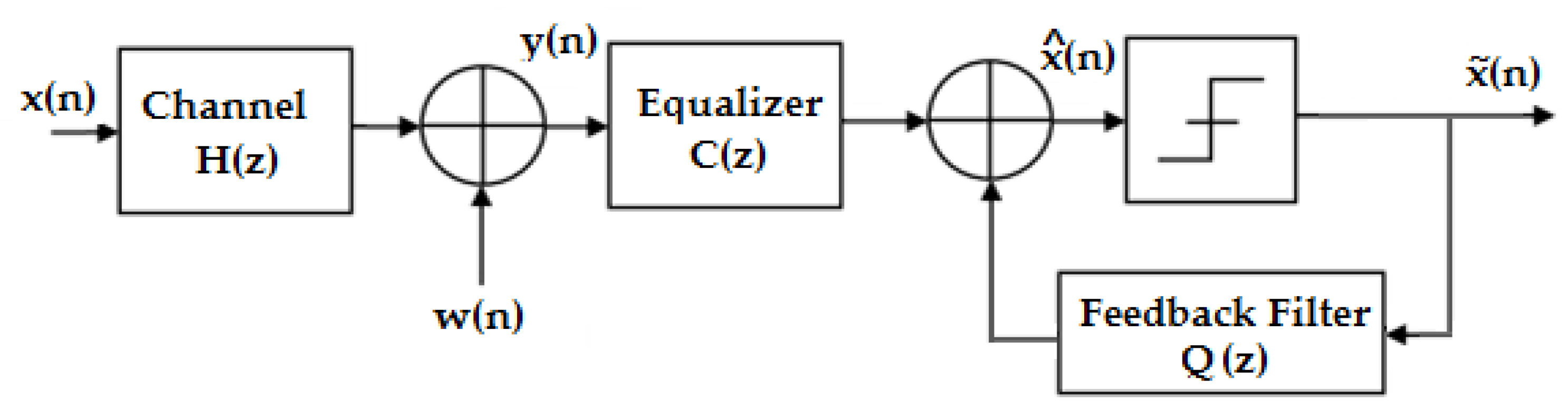
4. Design of the Equalizers
4.1. Linear Equalizer
4.2. Nonlinear Equalizer
4.3. Zero Forcing Equalizer
4.4. Minimum Mean Square Error Equalizer
4.5. Least Square Method for Channel Estimation
5. Simulation Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shannon, C.E. A mathematical theory of communication. BSTJ 1948, 27, 379–423. [Google Scholar]
- Jiang, S. On Reliable Data Transfer in Underwater Acoustic Networks: A Survey From Networking Perspective. IEEE Commun. Surv. Tutor. 2018, 20, 1036–1055. [Google Scholar] [CrossRef]
- Altun, U.; Karabulut Kurt, G.; Ozdemir, E. The Magic of Superposition: A Survey on Simultaneous Transmission Based Wireless Systems. IEEE Access 2022, 10, 79760–79794. [Google Scholar] [CrossRef]
- Nombela, F.; García, E.; Mateos, R.; Hernández, Á. Real-time architecture for channel estimation and equalization in broadband PLC. Microprocess. Microsyst. 2019, 65, 121–135. [Google Scholar] [CrossRef]
- Berrou, C. Le principe turbo appliqué à l’égalisation et à la détection. In Codes and Turbo Codes; Collection IRIS.; Springer: Paris, France, 2007; pp. 341–393. [Google Scholar]
- Jiang, J.; Zuo, J.; Feng, H. Research on Equalization Technology of Broadband Satellite Communication Channel. J. Phys. Conf. Ser. 2022, 2209, 012005. [Google Scholar] [CrossRef]
- Katwal, S.; Bhatia, V. Improved Channel Equalization using Deep Reinforcement Learning and Optimization. Endorsed Trans. Scalable Inf. Syst. 2021, 9, e4. [Google Scholar] [CrossRef]
- Goldberg, H.; Pinchas, M. A Novel Technique for Achieving the Approximated ISI at the Receiver for a 16QAM Signal Sent via a FIR Channel Based Only on the Received Information and Statistical Techniques. Entropy 2020, 22, 708. [Google Scholar] [CrossRef] [PubMed]
- Lucky, R.W. Automatic equalization for digital communication. Bell Syst. Tech. J. 1965, 44, 547–588. [Google Scholar] [CrossRef]
- Cioffi, J.M.; Dudevoir, G.P.; Vedat Eyuboglu, M.; Forney, G.D. MMSE decision-feedback equalizers and coding. I. Equalization results. IEEE Trans. Commun. 1995, 43, 2582–2594. [Google Scholar] [CrossRef]
- Jin, Z.; Wu, G.; Shi, F.; Chen, J. Equalization based inter symbol interference mitigation for time-interleaved photonic analog-to-digital converters. Opt. Express 2018, 26, 34373–34383. [Google Scholar] [CrossRef]
- Cuc, A.-M.; Morgoş, F.L.; Grava, C. Performances Analysis of Turbo Codes, LDPC Codes and Polar Codes Using AWGN Channel with and Without Inter Symbol Interference. In Proceedings of the 2022 International Symposium on Electronics and Telecommunications, Timisoara, Romania, 10–11 November 2022. [Google Scholar]
- Barry, J.R.; Lee, E.A.; Messerschmitt, D.G. Adaptive Equalization. In Digital Communication; Springer: Boston, MA, USA, 2004; pp. 423–460. [Google Scholar]
- Sen, J.; Nangare, N. Nonlinear Equalization for TDMR Channels Using Neural Networks. In Proceedings of the 2020 54th Annual Conference on Information Sciences and Systems (CISS), Princeton, NJ, USA, 18–20 March 2020; pp. 1–6. [Google Scholar]
- Proakis, J.C.; Salehi, M. Adaptive Equalization. In Digital Communications, 5th ed.; McGraw-Hill: New York, NY, USA, 2008; pp. 689–736. [Google Scholar]
- Berrou, C.; Glavieux, A.; Thitimajshima, P. Near Shannon limit error-correcting coding and decoding: Turbo-codes. 1. In Proceedings of the ICC ‘93—IEEE International Conference on Communications, Geneva, Switzerland, 23–26 May 1993; Volume 2, pp. 1064–1070. [Google Scholar]
- Gallager, R.G. Low Density Parity Check Codes. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1960. [Google Scholar]
- Arikan, E. Channel polarization: A method for constructing capacity achieving codes for symmetric binary-input memory less channels. IEEE Trans. Inf. Theory 2009, 55, 3051–3073. [Google Scholar] [CrossRef]
- Cuc, A.-M.; Morgoş, F.L.; Grava, C.; Curilă, S.; Burcă, T.A. Performances Comparison between Turbo Codes and Polar Codes. In Proceedings of the 2021 16th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 10–11 June 2021; pp. 1–4. [Google Scholar]
- Cuc, A.-M.; Grava, C.; Morgos, F.L.; Burca, T.A. Performances Comparison between Low Density Parity Check Codes and Polar Codes. In Proceedings of the 2022 29th International Conference on Systems, Signals and Image Processing (IWSSIP), Sofia, Bulgaria, 1–3 June 2022; pp. 1–4. [Google Scholar]
- Rusek, F.; Prlja, A. Optimal Channel Shortening for MIMO and ISI Channels. IEEE Trans. Wirel. Commun. 2012, 11, 810–818. [Google Scholar] [CrossRef]
- Fayyaz, U.U.; Barry, J.R. Polar codes for partial response channels. In Proceedings of the 2013 IEEE International Conference on Communications (ICC), Budapest, Hungary, 9–13 June 2013; pp. 4337–4341. [Google Scholar]
- Adamu, M.J.; Qiang, L.; Zakariyya, R.S.; Nyatega, C.O.; Kawuwa, H.B.; Younis, A. An Efficient Turbo Decoding and Frequency Domain Turbo Equalization for LTE Based Narrowband Internet of Things (NB-IoT) Systems. Sensors 2021, 21, 5351. [Google Scholar] [CrossRef]
- Jiang, Y.; Kim, H.; Asnani, H.; Kannan, S.; Oh, S.; Viswanath, P. Turbo Autoencoder: Deep learning based channel codes for point-to-point communication channels. Neural Inf. Process. Syst. 2019, 248, 2758–2768. [Google Scholar]
- Czapiewska, A.; Luksza, A.; Studanski, R.; Zak, A. Reduction of the Multipath Propagation Effect in a Hydroacoustic Channel Using Filtration in Cepstrum. Sensors 2020, 20, 751. [Google Scholar] [CrossRef]
- Borges, D.; Montezuma, P.; Dinis, R.; Beko, M. Massive MIMO Techniques for 5G and Beyond—Opportunities and Challenges. Electronics 2021, 10, 1667. [Google Scholar] [CrossRef]
- Chafii, M.; Bariah, L.; Muhaidat, S.; Debbah, M. Twelve Scientific Challenges for 6G: Rethinking the Foundations of Communications Theory. arxiv-CS-Inf. Theory 2022, arXiv:2207.01843. [Google Scholar]
- Välimäki, V.; Reiss, J.D. All about Audio Equalization: Solutions and Frontiers. Appl. Sci. 2016, 6, 129. [Google Scholar] [CrossRef]
- Üney, M. Optimal and Adaptive Filtering; IDCOM: Edinburgh, UK, 2017. [Google Scholar]
- Napolitano, A. Communications systems: Design and analysis. In Cyclostationary Processes and Time Series; Academic Press: Cambridge, MA, USA, 2020; pp. 327–353. [Google Scholar]
- Santos, I.; Murillo-Fuentes, J.J.; Boloix-Tortosa, R.; Arias-de-Reyna, E.; Olmos, P.M. Expectation Propagation as Turbo Equalizer in ISI Channels. IEEE Trans. Commun. 2017, 65, 360–370. [Google Scholar] [CrossRef]
- Hassan, A.Y. A new approach for designing and implementing ADF equalization for 5G frequency selective channel based on two operating phases of LS and RLS algorithms. Telecommun. Syst. 2021, 77, 543–562. [Google Scholar] [CrossRef]
- Şahin, S.; Cipriano, A.M.; Poulliat, C.; Boucheret, M.-L. Iterative Equalization With Decision Feedback Based on Expectation Propagation. IEEE Trans. Commun. 2018, 66, 4473–4487. [Google Scholar]
- Ke, M.; Liu, Z.; Luo, X. Joint Equalization and Raptor Decoding for Underwater Acoustic Communication. Artif. Intell. Commun. Netw. 2020, 356, 126–135. [Google Scholar]
- Fujia, S.; Okamoto, E.; Takenaka, H.; Kunimori, H.; Endo, H.; Fujiwara, M.; Shimizu, R.; Sasaki, M.; Toyoshima, M. Performance analysis of polar-code transmission experiments over 7.8-km terrestrial free-space optical link using channel equalization. Int. Conf. Space Opt. 2021, 118525, 199. [Google Scholar]
- Feng, L.; Qianqian, W.; Conggai, L.; Fangjiong, C.; Yanli, X. Polar Coding Aided by Adaptive Channel Equalization for Underwater Acoustic Communication. IEICE Trans. Fundam. 2023, 1, 83–87. [Google Scholar]
- Zhang, Z.; Yin, Y.; Rebeiz, G.M. Intersymbol Interference and Equalization for Large 5G Phased Arrays With Wide Scan Angles. IEEE Trans. Microw. Theory Tech. 2021, 69, 1955–1964. [Google Scholar] [CrossRef]
- Li, J.; Mitra, U. Improved Atomic Norm Based Channel Estimation for Time-Varying Narrowband Leaked Channels. In Proceedings of the 2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 4825–4829. [Google Scholar]
- Scarano, G.; Petroni, A.; Biagi, M.; Cusani, R. Blind Fractionally Spaced Channel Equalization for Shallow Water PPM Digital Communications Links. Sensors 2019, 19, 4604. [Google Scholar] [CrossRef]
- Kirchner, J.W. Impulse Response Functions for Nonlinear, Nonstationary, and Heterogeneous Systems, Estimated by Deconvolution and Demixing of Noisy Time Series. Sensors 2022, 22, 3291. [Google Scholar] [CrossRef]
- Suissa, G.; Pinchas, M. A New Equalization Performance Analyzing Method for Blind Adaptive Equalizers Inspired by Maximum Time Interval Error. J. Signal Process. Syst. 2017, 8, 42–64. [Google Scholar] [CrossRef]
- Malik, G.; Sappal, A.S. Adaptive Equalization Algorithms: An Overview. Int. J. Adv. Comput. Sci. Appl. 2011, 2, 62–67. [Google Scholar] [CrossRef]
- Sahoo, J.; Mishra, L.P.; Panda, S.; Mohanty, M.N. Channel Equalization Using Adaptive Zero Forcing Technique in Rayleigh Fading Channel. In Proceedings of the 2015 International Conference on Information Technology (ICIT), Bhubaneswar, India, 21–23 December 2015; pp. 60–64. [Google Scholar]
- Sathish Kumar, N.; Shankar Kumar, K.R. Performance analysis and comparison of m x n zero forcing and MMSE equalizer based receiver for mimo wireless channel. Songklanakarin J. Sci. Technol. 2011, 33, 335–340. [Google Scholar]
- Fan, T.; Feng, H.; Guo, G. Joint detection based on the total least squares. Procedia Comput. Sci. 2018, 131, 167–176. [Google Scholar] [CrossRef]
- Morgoș, F.L. Contribuţii Privind Îmbunătăţirea Tehnicilor de Egalizare ale Canalelor Radio; Politehnica: Timisoara, Romania, 2014. [Google Scholar]
- Berrou, C. The Ten-Year-Old Turbo Codes are Entering into Service. IEEE Commun. Mag. 2003, 41, 110–116. [Google Scholar] [CrossRef]
















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cuc, A.-M.; Morgoș, F.L.; Grava, C. Performance Analysis of Turbo Codes, LDPC Codes, and Polar Codes over an AWGN Channel in the Presence of Inter Symbol Interference. Sensors 2023, 23, 1942. https://doi.org/10.3390/s23041942
Cuc A-M, Morgoș FL, Grava C. Performance Analysis of Turbo Codes, LDPC Codes, and Polar Codes over an AWGN Channel in the Presence of Inter Symbol Interference. Sensors. 2023; 23(4):1942. https://doi.org/10.3390/s23041942
Chicago/Turabian StyleCuc, Adriana-Maria, Florin Lucian Morgoș, and Cristian Grava. 2023. "Performance Analysis of Turbo Codes, LDPC Codes, and Polar Codes over an AWGN Channel in the Presence of Inter Symbol Interference" Sensors 23, no. 4: 1942. https://doi.org/10.3390/s23041942
APA StyleCuc, A.-M., Morgoș, F. L., & Grava, C. (2023). Performance Analysis of Turbo Codes, LDPC Codes, and Polar Codes over an AWGN Channel in the Presence of Inter Symbol Interference. Sensors, 23(4), 1942. https://doi.org/10.3390/s23041942