

Practical Application of Drive-By Monitoring Technology to Road Roughness Estimation Using Buses in Service

Abstract
:1. Introduction
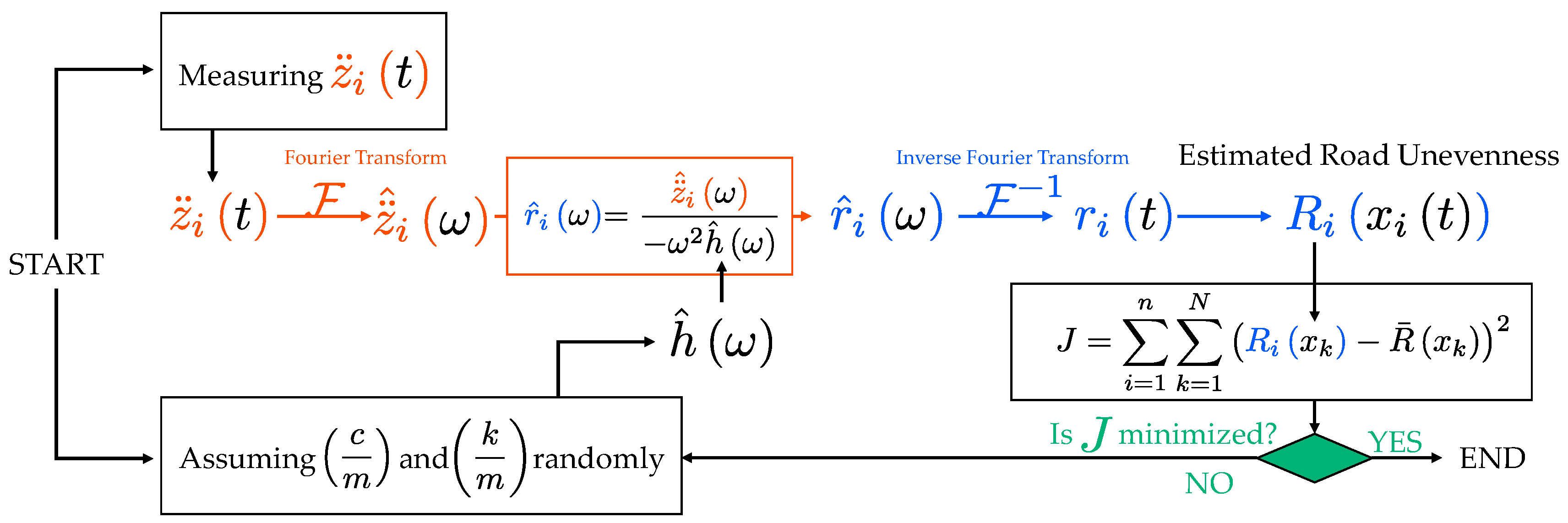
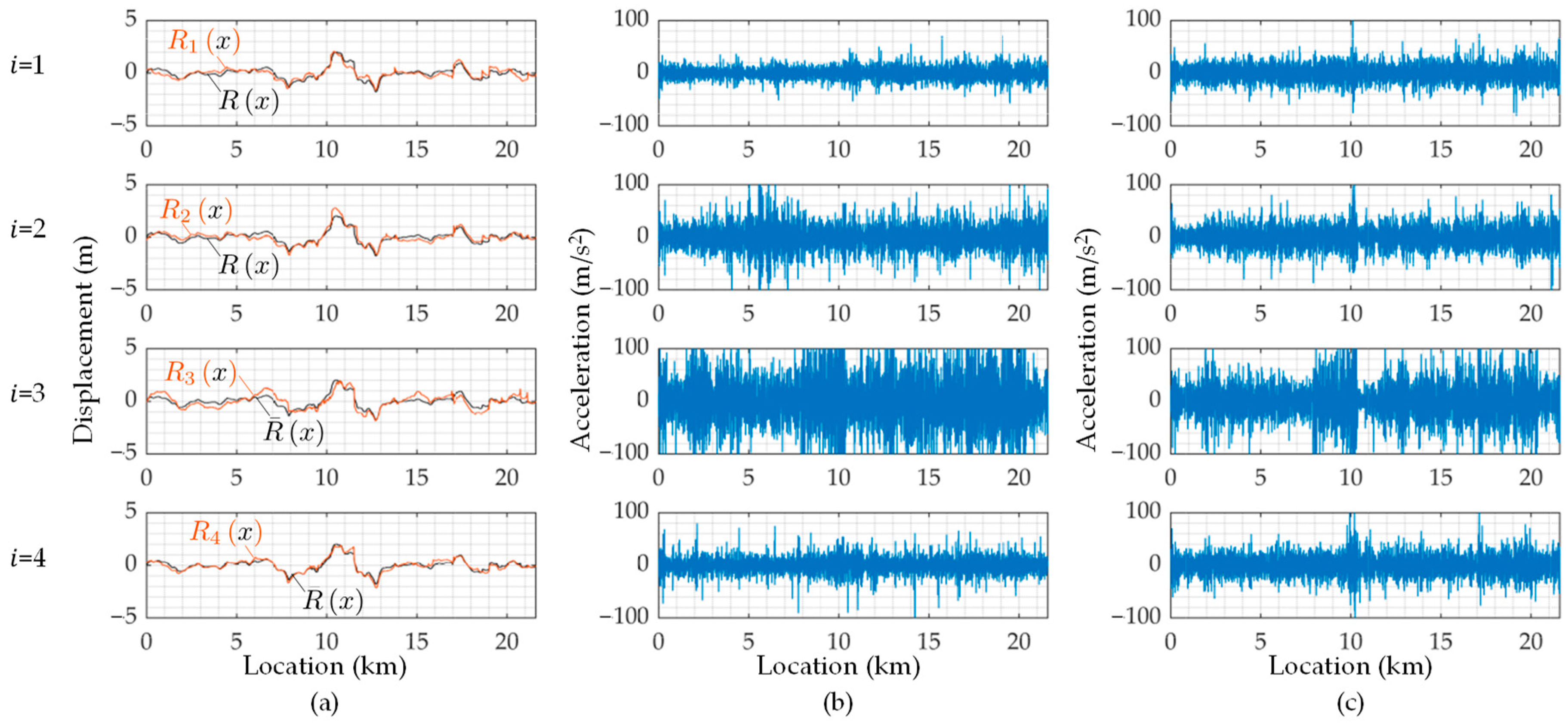
- This study shows two methods that can estimate the input road unevenness from vehicle vibration data even without information on the vehicle’s mechanical parameters.
- Applying the proposed method to vehicle vibration data both of vertical and traveling directions, the road unevenness angle and curvature can be estimated.
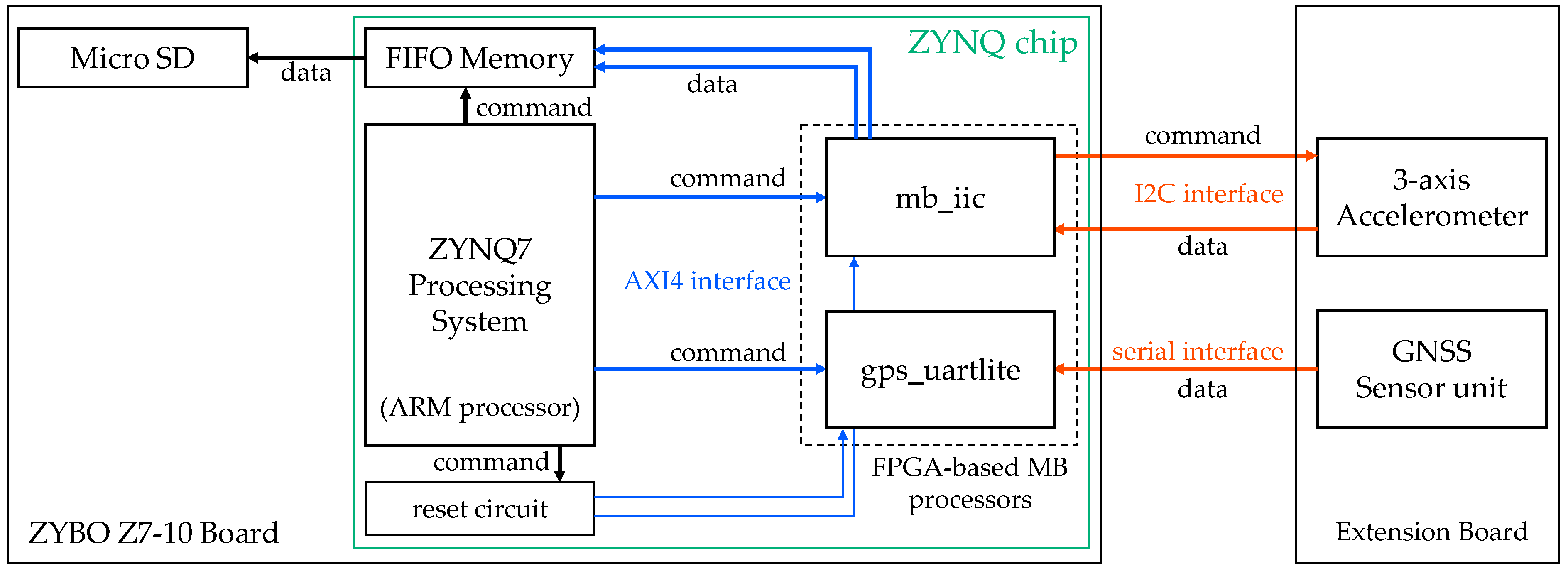
- The suggested device with a vibration sensor and a GNSS device makes the proposed method practical. Position synchronization realizes this.
2. Sensor System
2.1. Concept of Sensor
2.2. Specification and Function
3. Road Unevenness Estimation
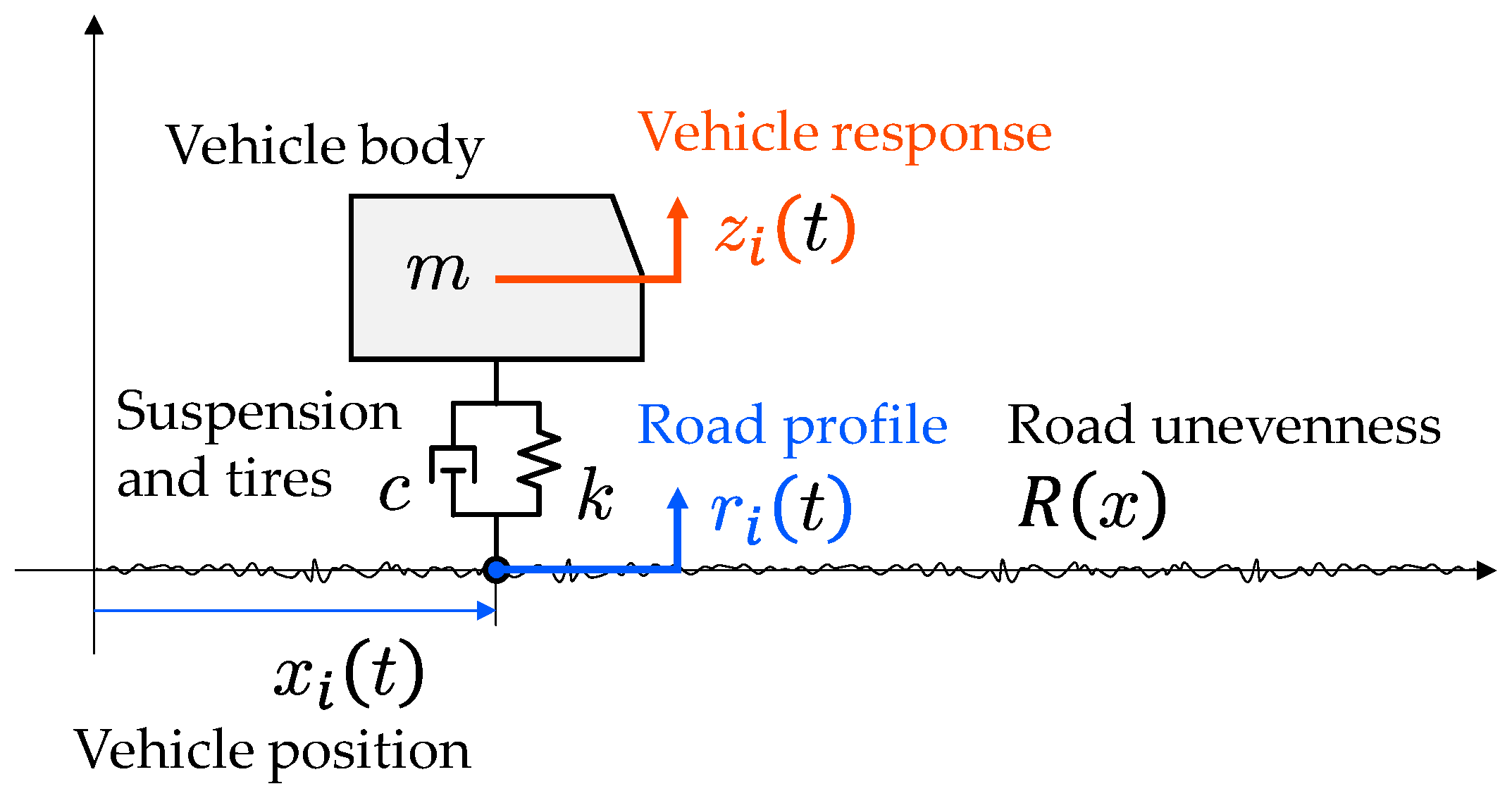
3.1. Vehicle System
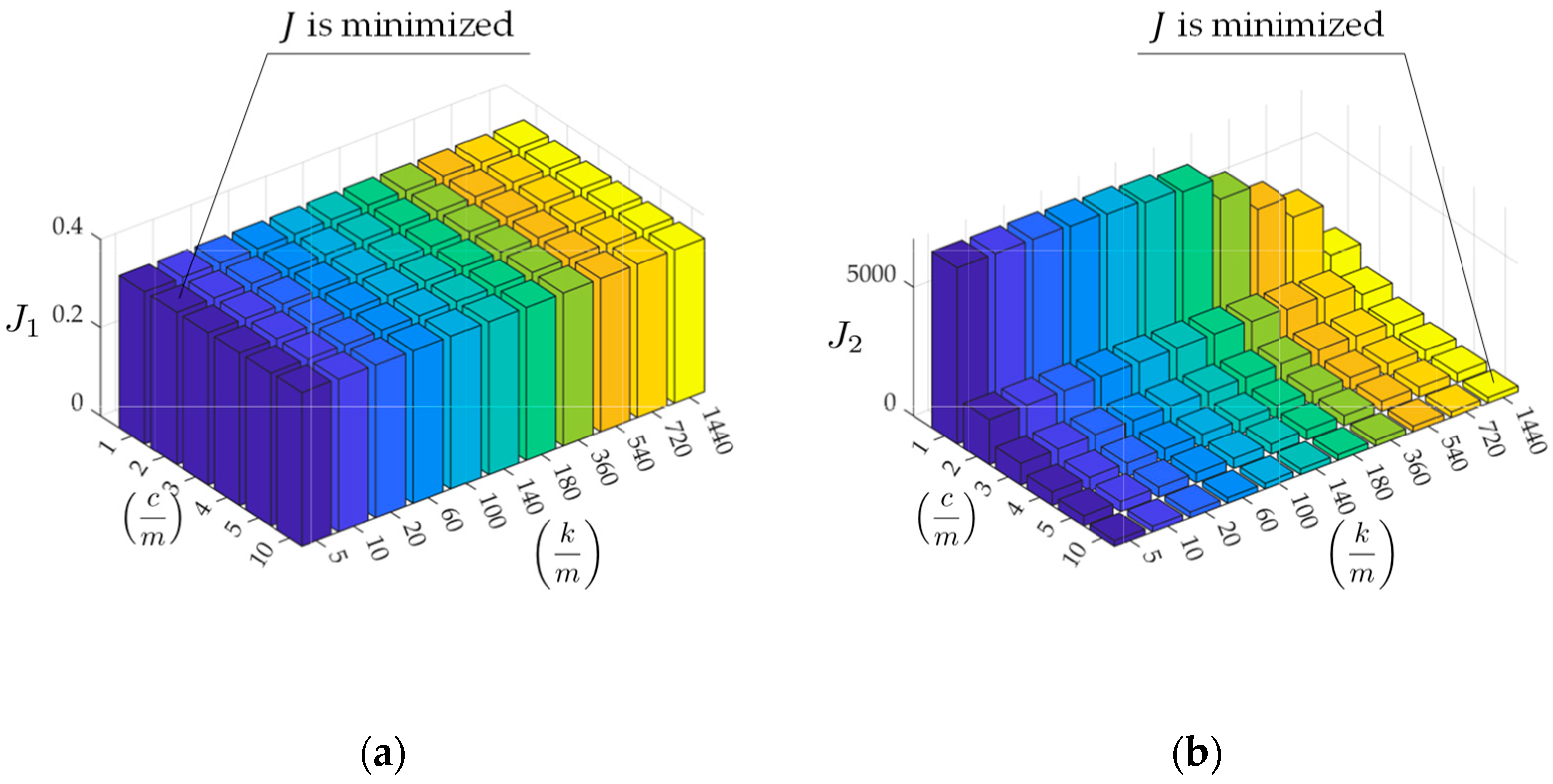
3.2. Traditional Method
3.3. The New Method
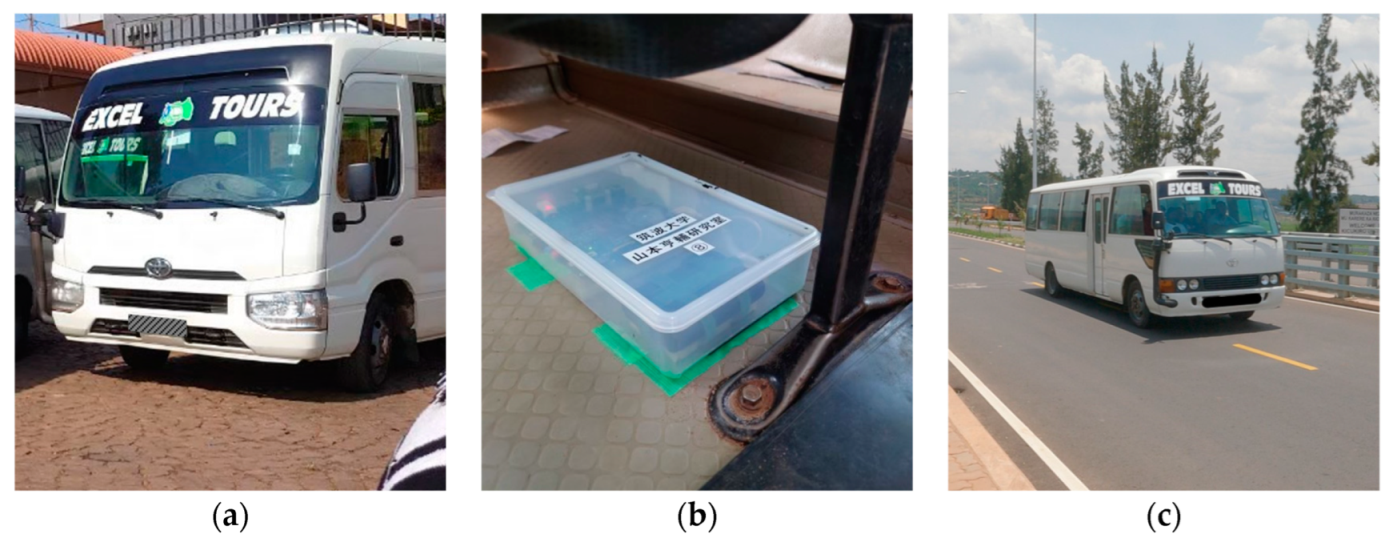
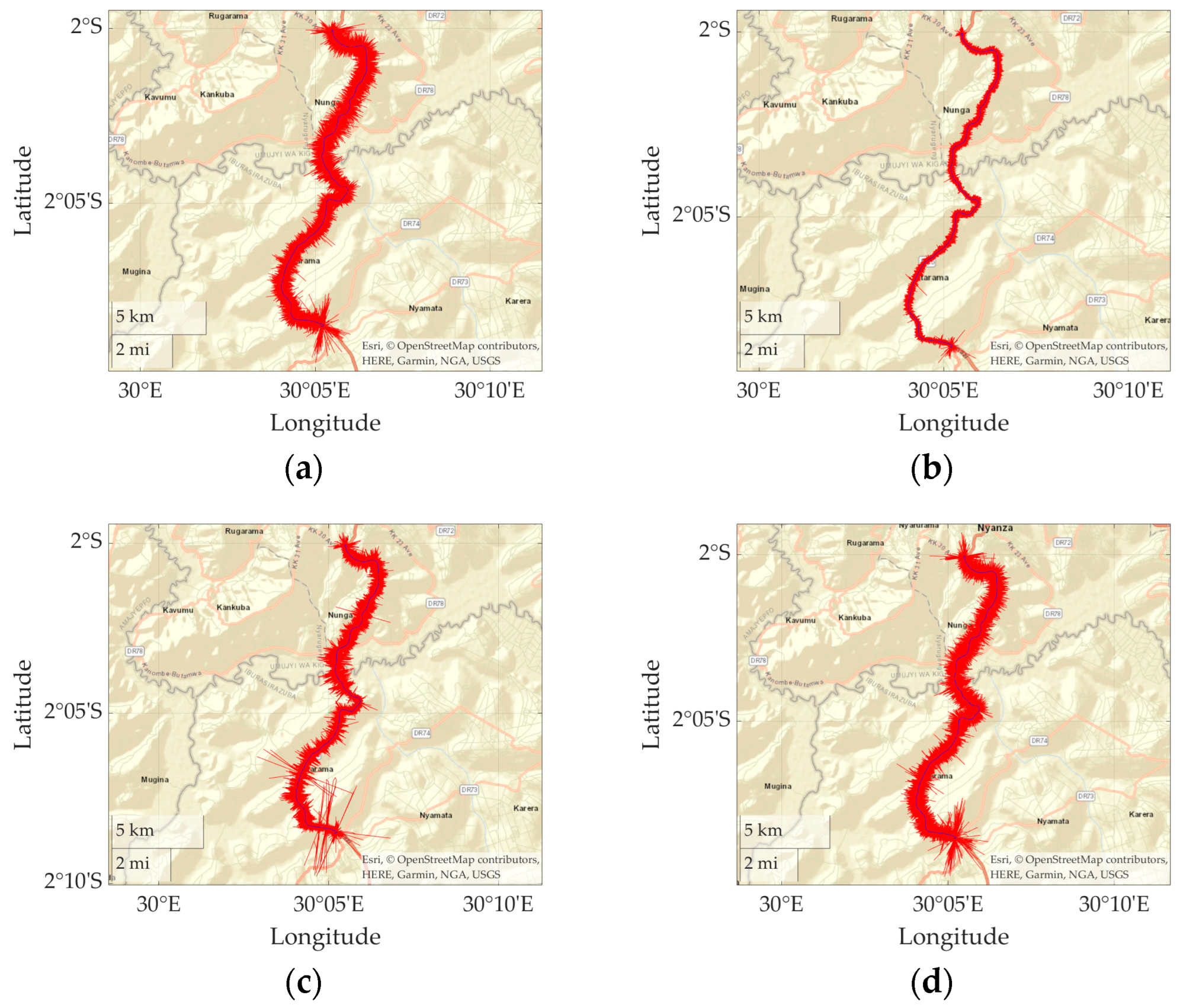
4. Field Test
4.1. Experimental Setting
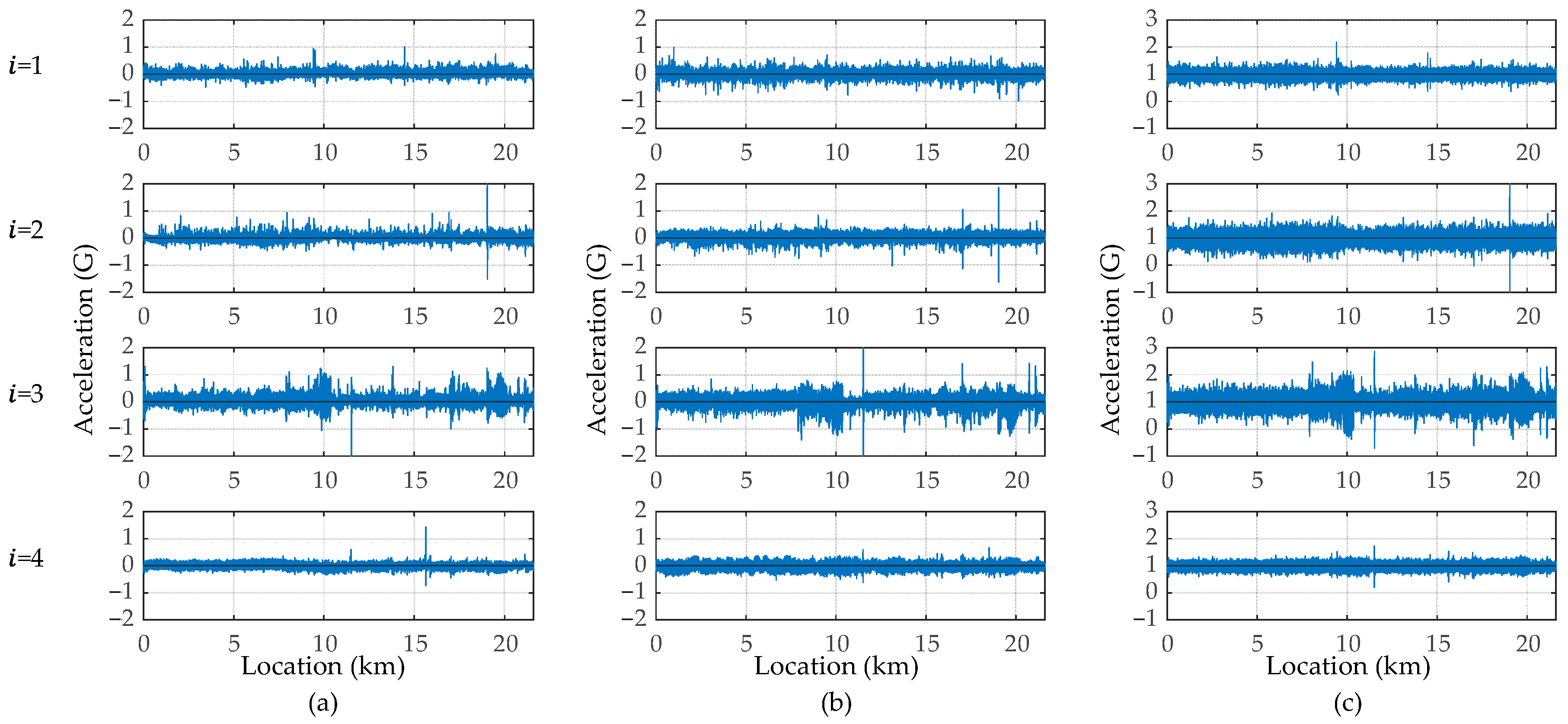
4.2. Measured Data
4.3. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, Y.B.; Wang, B.; Wang, Z.; Shi, K.; Xu, H. Scanning of Bridge Surface Roughness from Two-Axle Vehicle Response by EKF-UI and Contact Residual: Theoretical Study. Sensors 2022, 22, 3410. [Google Scholar] [CrossRef] [PubMed]
- Yu, Q.; Fang, Y.; Wix, R. Pavement roughness index estimation and anomaly detection using smartphones. Autom. Constr. 2022, 141, 104409. [Google Scholar] [CrossRef]
- Sayers, M.W.; Michael, W. International Road Roughness Experiment: Establishing Methods for Correlation and a Calibration Standard for Measurements; World Bank Technical Paper; World Bank Group: Washington, DC, USA, 1986; p. 45. [Google Scholar]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Lin, C.W.; Yang, Y.B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W. Vehicle–bridge interaction dynamics and potential applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- McGetrick, P.; Kim, C.W.; González, A. Dynamic axle force and road profile identification using a moving vehicle. Int. J. Archit. Eng. Constr. 2013, 2, 1–16. [Google Scholar] [CrossRef]
- Zhao, B.; Nagayama, T.; Toyoda, M.; Makihata, N.; Takahashi, M.; Ieiri, M. Vehicle model calibration in the frequency domain and its application to large-scale IRI estimation. J. Disaster Res. 2017, 12, 446–455. [Google Scholar] [CrossRef]
- Zhao, B.; Nagayama, T.; Xue, K. Road profile estimation, and its numerical and experimental validation, by smartphone measurement of the dynamic responses of an ordinary vehicle. J. Sound Vib. 2019, 457, 92–117. [Google Scholar] [CrossRef]
- Xue, K.; Nagayama, T.; Zhao, B. Road profile estimation and half-car model identification through the automated processing of smartphone data. Mech. Syst. Signal Process. 2020, 142, 106722. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P. Using Kalman filter to estimate the pavement profile of a bridge from a passing vehicle considering their interaction. Acta Mech. 2021, 232, 4347–4362. [Google Scholar] [CrossRef]
- Gamage, D.; Pasindu, H.R.; Bandara, S. Pavement roughness evaluation method for low volume roads. In Proceedings of the Eighth International Conference on Maintenance and Rehabilitation of Pavements, Singapore, 27–29 July 2016; pp. 1–10. [Google Scholar]
- Wang, G.; Burrow, M.; Ghataora, G. Study of the factors affecting road roughness measurement using smartphones. J. Infrastruct. Syst. 2020, 26, 04020020. [Google Scholar] [CrossRef]
- Douangphachanh, V.; Oneyama, H. A study on the use of smartphones under realistic settings to estimate road roughness condition. EURASIP J. Wirel. Commun. Netw. 2014, 2014, 114. [Google Scholar] [CrossRef]
- Moghadam, A.; Sarlo, R. Application of Smartphones in Pavement Profile Estimation Using SDOF Model-Based Noisy Deconvolution. Adv. Civ. Eng. 2021, 2021, 6654723. [Google Scholar] [CrossRef]
- Keenahan, J.; Ren, Y.; O’Brien, E.J. Determination of road profile using multiple passing vehicle measurements. Struct. Infrastruct. Eng. 2019, 16, 1262–1275. [Google Scholar] [CrossRef]
- Shin, R.; Okada, Y.; Yamamoto, K. A Numerical Study of Parameter Estimation Accuracy in System Identification Using Mobile Sensing. JSCE’s J. Struct. Eng. 2022, 68A, 298–309. (In Japanese) [Google Scholar]
- Yamamoto, K.; Oshima, Y.; Kim, C.W.; Sugiura, K. Bridge damage detection by application of singular value decomposition to vehicle responses. JSCE’s J. Struct. Eng. 2013, 59A, 320–331. (In Japanese) [Google Scholar]
- Malekjafarian, A.; Golpayegani, F.; Moloney, C.; Clarke, S. A machine learning approach to bridge-damage detection using responses measured on a passing vehicle. Sensors 2019, 19, 4035. [Google Scholar] [CrossRef] [PubMed]
- Malekjafarian, A.; Corbally, R.; Gong, W. A review of mobile sensing of bridges using moving vehicles: Progress to date, challenges and future trends. Structures 2022, 44, 1466–1489. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 10 | ||||||
| 5 | 10 | 20 | 60 | 100 | 140 | 180 | 360 | 540 | 720 | 1440 | |
| Natural Frequency (Hz) | 0.36 | 0.50 | 0.71 | 1.23 | 1.59 | 1.88 | 2.14 | 3.02 | 3.70 | 4.27 | 6.04 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yamamoto, K.; Shin, R.; Sakuma, K.; Ono, M.; Okada, Y. Practical Application of Drive-By Monitoring Technology to Road Roughness Estimation Using Buses in Service. Sensors 2023, 23, 2004. https://doi.org/10.3390/s23042004
Yamamoto K, Shin R, Sakuma K, Ono M, Okada Y. Practical Application of Drive-By Monitoring Technology to Road Roughness Estimation Using Buses in Service. Sensors. 2023; 23(4):2004. https://doi.org/10.3390/s23042004
Chicago/Turabian StyleYamamoto, Kyosuke, Ryota Shin, Katsuki Sakuma, Masaaki Ono, and Yukihiko Okada. 2023. "Practical Application of Drive-By Monitoring Technology to Road Roughness Estimation Using Buses in Service" Sensors 23, no. 4: 2004. https://doi.org/10.3390/s23042004