1. Introduction
In recent decades, wireless sensor networks (WSNs) have been widely researched and applied in many fields, such as self-calibration, surveillance, and target tracking [
1,
2], owing to their small size, high flexibility, multiple functions, low costs, and simple installation [
3,
4,
5,
6]. WSNs are part of a fully distributed network consisting of many wireless sensors [
7]. One of the core issues of their application is how to design a distributed filter to precisely estimate the system state [
8]. Considering the Kalman filter is one of the most classical linear filters and is successfully applied in many fields, many researchers have combined the filter with WSNs to extend their applications [
9,
10,
11,
12,
13,
14].
In contrast with wired sensor networks, although WSNs have many advantages (as mentioned above) there are still some limitations, including limited energy, poor bandwidth, short communication distance, weak computing, storage capabilities, etc. [
15,
16]. The research predicted that the CO
emission would be over 1400% (1900 baseline at 100%) and that the primary energy consumption would be over 300% (1970 baseline at 100%) by 2022 [
17]. Thus, from the view of energy conservation and emission reduction, as well as the extended lifetime of WSNs, it is necessary to design energy-saving strategies for WSNs. It is well known that an event-driven strategy is one of the most representative solutions to the problem of limited energy [
18,
19], it can effectively save energy by avoiding unnecessary information transmission [
20]. As a result, many scholars have studied it from a communication perspective. The distributed estimation problem of a network sensing system with an event-driven schedule has been analyzed in [
21]; the authors proposed the event-triggered Kalman consensus filter by minimizing the mean square error based on event-driven protocols. Moreover, data transferring and scheduling were studied [
22], and the lifetime of the network has been extended by reducing the communication bandwidth and improving energy efficiency.
In addition to the perspective of communication, some scholars have also considered the event-driven strategy from a data features perspective. The literature [
23] demonstrates a data packet processor based on an event-driven approach. To save energy effectively, only necessary packets are selected for transmission after ensuring the performance of the
filter. The problem of event-triggered state estimation in a linear Gaussian system with an energy harvesting sensor is studied in [
24]. Moreover, the event-triggered condition is designed based on the importance of data and available energy, and then the frequency of data transmission is adjusted accordingly. In [
25], a new event-driven strategy is proposed where the upper and lower bounds of the event-triggered threshold are time-varying and automatically adjusted. Although these works can effectively save energy through event-triggered scheduling, the influence of WSN topology on energy consumption is ignored.
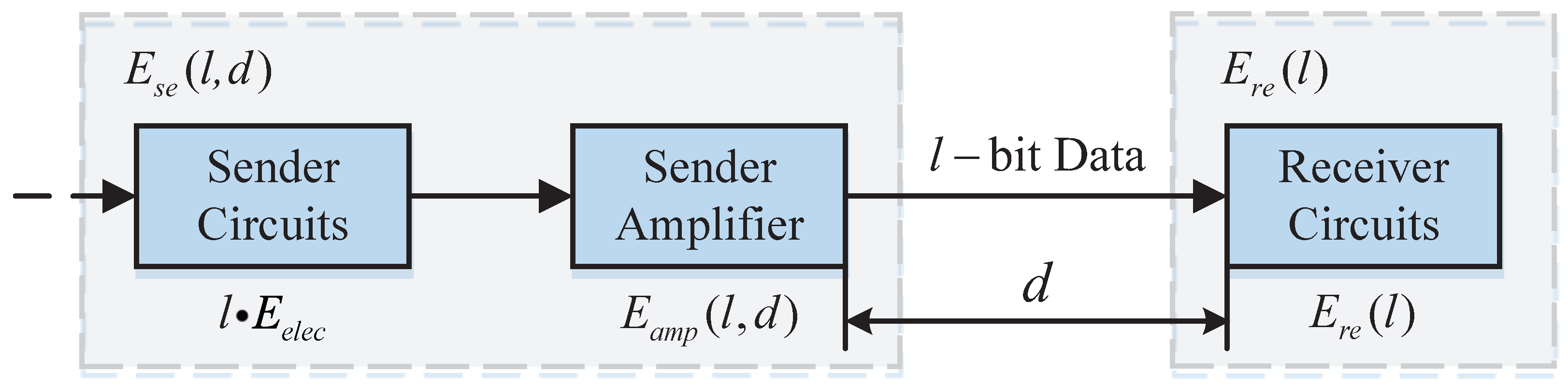
In WSNs, the communication distance between sensors is the most important factor for energy consumption [
26]. Because these connections determine the WSN topologies, topology control is reviewed in [
27,
28], including its control method, evaluation standard, and some common issues. In [
29], the authors proposed a distributed topology control algorithm, which optimizes the topology based on the real-time residual energy of nodes. Similar works can be found in [
30,
31,
32,
33,
34,
35].
However, a large number of research studies have ignored the fact that sensor nodes have limited data storage capacity. According to [
26], transferring data consumes more energy than collecting it. To balance estimated accuracy and energy savings, this paper proposes a fully distributed state estimator with a dual energy-saving strategy (e.g., an event-triggered schedule and topological transformation).
In addition, the packet loss factor is essential when designing a WSN with good performance [
36]. It is widely known that excessive packet loss can significantly impact the quality of information fusion. As sensors can only store a small amount of data in finite steps, the event-driven strategy designed in this paper effectively mitigates the effects of packet loss by utilizing historical data. In practice, these two strategies are interdependent and both impact the estimation performance of WSNs. Thus, the filter with dual energy-saving strategies can not only save energy but also promote more uniform energy consumption. Moreover, it can improve the robustness and extend the lifetime of WSNs by making full use of the node’s storage ability. The main contributions of the paper are summarized as follows:
The remainder of this paper is organized as follows. In
Section 2, we present some mathematical preliminaries required in this paper. In
Section 3, we introduce the distributed estimation framework and design the energy-saving strategy. In
Section 4, we formulate a type of distributed state estimator algorithm with dual driving and state the conditions for stability. Finally, we provide simulation verification of the proposed algorithm in
Section 5; the conclusions are drawn in
Section 6.
2. Mathematical Preliminaries
denotes the set of real matrices with n rows and m columns. I is the n-dimensional identity matrix. represents the set of positive integers. represents a block-diagonal matrix. In addition, represents the mathematical expectation.
Let is an m-order undirected graph. is a nonempty finite set of nodes and is a set of edges. In addition, , represents an edge of . The weight adjacency matrix is denoted by . denotes the weight for the edge , which represents the closeness of the connection between any two sensor nodes. Meanwhile, we assume that . The set of real-time neighbors of node i is denoted by .
In addition, to clarify the mathematical symbols used, we list them in
Table 1, and the abbreviations used throughout the paper are listed in
Table 2.
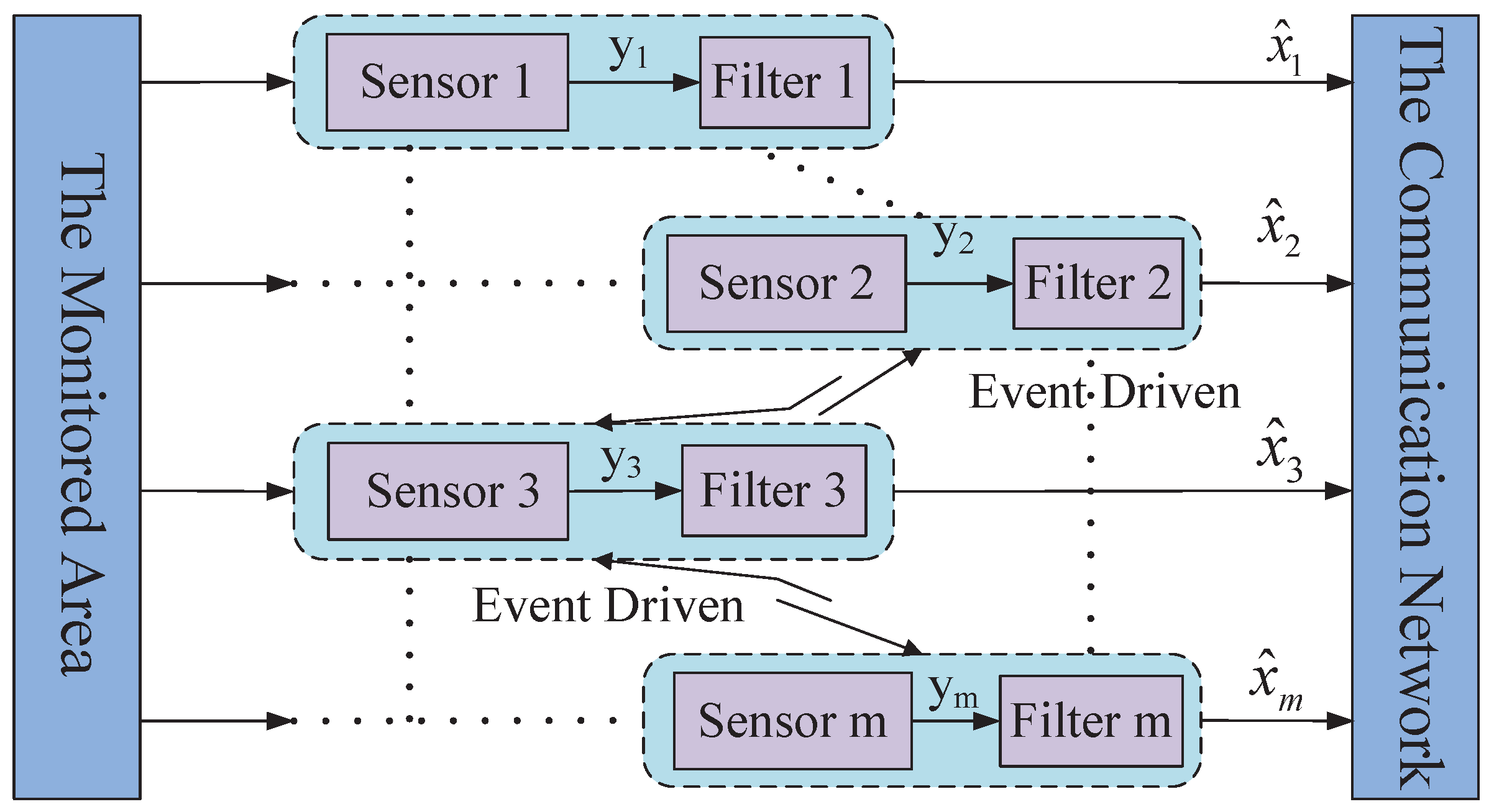
4. Distributed State Estimator Design
Firstly,
represent the prior estimate and posterior estimate of the system state for node
i at the
k instance, respectively. They are defined as follows.
If the
represents packet loss and the
otherwise at the
k instance, its value is controlled by the packet loss rate
. Suppose that the
is the latest neighbor information used by node
i for consensus fusion. Then, the rules are given as follows.
where
is the information of the timeliness neighbor of node
i.
Remark 4. After node i broadcasts its local information, the neighboring nodes may either receive the information or experience packet loss, which can be caused by unknown factors. Assuming packet loss is a uniformly random process, it can be considered a probabilistic event. Thus, the packet loss rate α () can be used to describe this phenomenon.
Then, the current estimation
is given by
where
and
represent the Kalman gain and consensus gain of node
i at the
k instance, respectively.
Next, the stability properties of the proposed algorithm are analyzed. For the reader’s convenience, all of the proofs are given in
Appendix A.
Theorem 1. Setting the consensus gain yields the sub-optimal Kalman gain, i.e., .
Theorem 2. The consensus Kalman filter is asymptotical stability if Equation (10) and are used with the gain c satisfying the following condition.
where
,
.
5. Simulations
In this section, the performance of the proposed filter is illustrated by a state estimation in the linear system. Matlab 2018b was used in the simulation on the computer with Intel(R) Core(TM) i5-1035G1 CPU @ 1.00 GHz 1.19 GHz. The dynamical equation of the system is given by
where
is the state of the stem at the
k instance,
is a discrete random process with zero means, and its covariance matrix is
. The initial value of the system state is
.
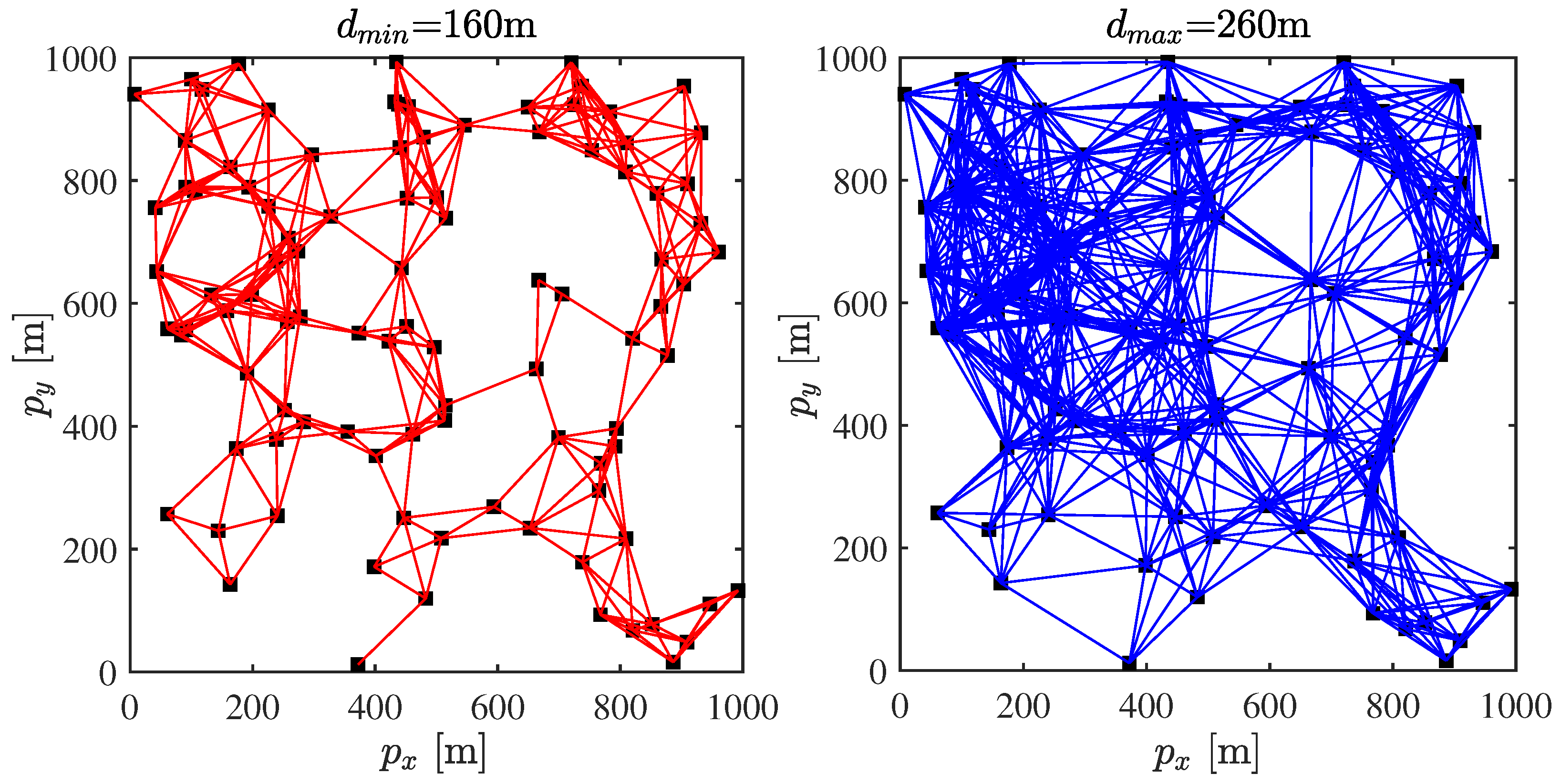
Here, we consider a WSN composed of
sensor nodes located in a square region with a 1000 m side length. The topologies of WSNs under two fixed communication radii are shown in
Figure 4, where the communication radius of the left figure is
m and another is
m. If two nodes are connected, it means that they are able to receive local information from each other, otherwise, they are not. It is easy to see from
Figure 4 that the complexity degree of WSNs is completely determined by the communication radius.
The detection value provided by each sensor node can be defined as
where
is the measurement noise with zero means and its covariance matrix is
. The
denotes uniformly distributed random numbers in
. In addition, let
, as well as the initial energy of each node be 2 J. Other parameters in the simulation are set in
Table 3.
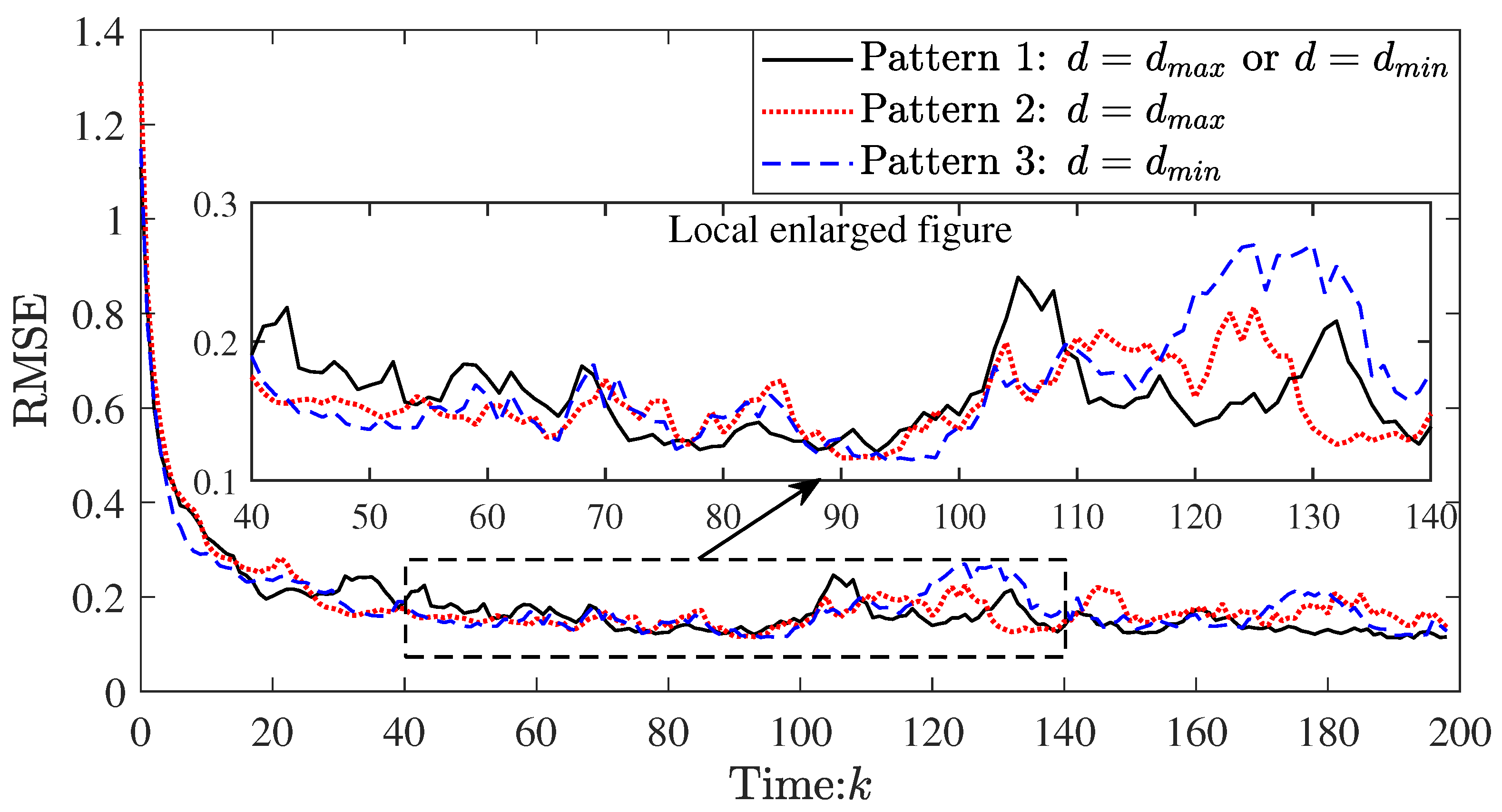
In order to show the performance of the filter, it is expressed in terms of the root mean square error (RMSE):
For showing the filter performance proposed in this paper, the different communication patterns are compared. Pattern 1: our algorithm (using the event-triggered schedule and topology transformation schedule, i.e.,
or
). Pattern 2: distributed Kalman filter (using the fixed large communication radius, i.e.,
). Pattern 3: distributed Kalman filter (using the fixed small communication radius, i.e.,
). The RMSEs of three patterns are depicted in
Figure 5.
Overall, their filtering accuracy is comparable. The performance of pattern 1 is better after the 140th step. This trend is much more obvious as time goes by. Compared with pattern 1, the node that first runs out of energy (i.e., dead node) appears earlier in other patterns (see
Figure 6), which leads to the deterioration of the topology connectivity. Thus, there is a decrease in the filtering accuracy of patterns 2 and 3 between
and
.
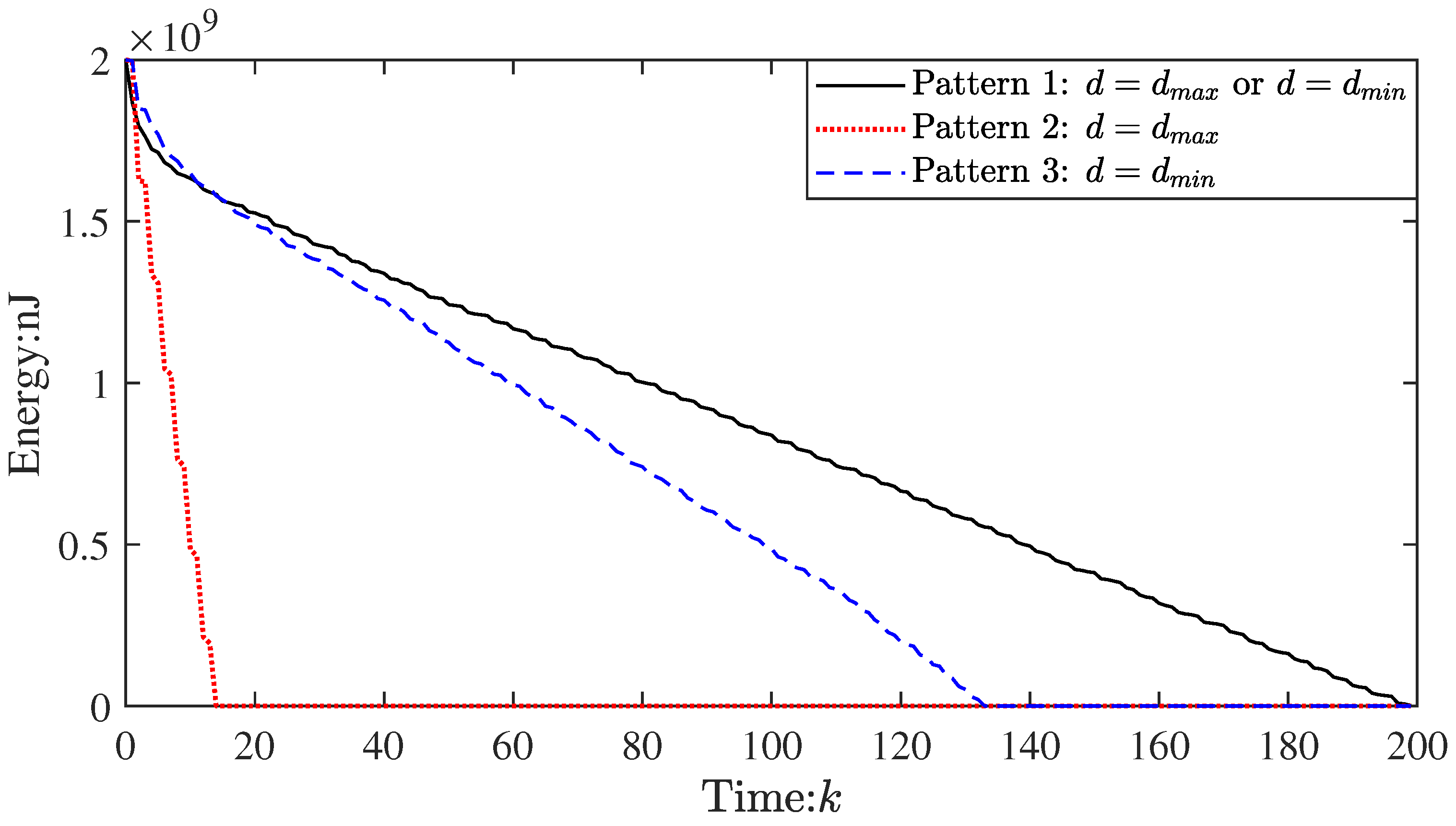
Figure 6 shows the energy consumption change of the node that first runs out of energy in the three patterns. It is evident that the dead node in pattern 1 appears later (around the 200th step), indicating that it can significantly extend the lifetime of WSNs. Specifically, compared to pattern 3, it prolongs the lifetime by about 40%, let alone pattern 2. This shows that the proposed topology transformation strategy is highly effective in energy conservation.
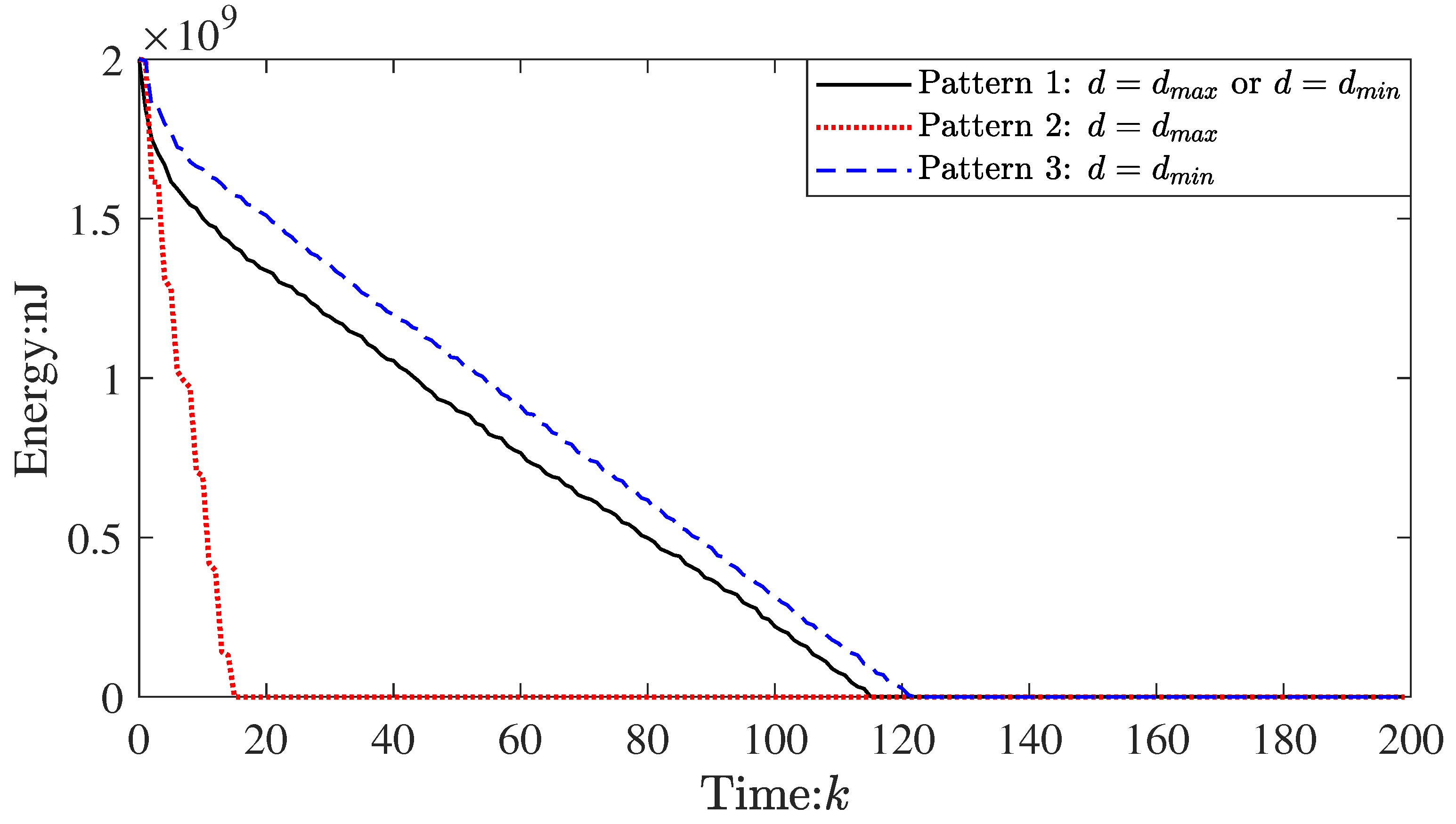
However, if the parameters are not selected suitably, the above result cannot be obtained. For example, let
, the lifetimes of WSNs in pattern 1 and pattern 3 will be changed (see
Figure 7).
To further illustrate the effectiveness of the method, the event-triggered frequency and communication distance of the nodes in WSNs at every time
k are shown in
Figure 8 and
Figure 9, respectively (in order to clearly display the figure, the event-triggered numbers at time
of the three patterns are deleted).
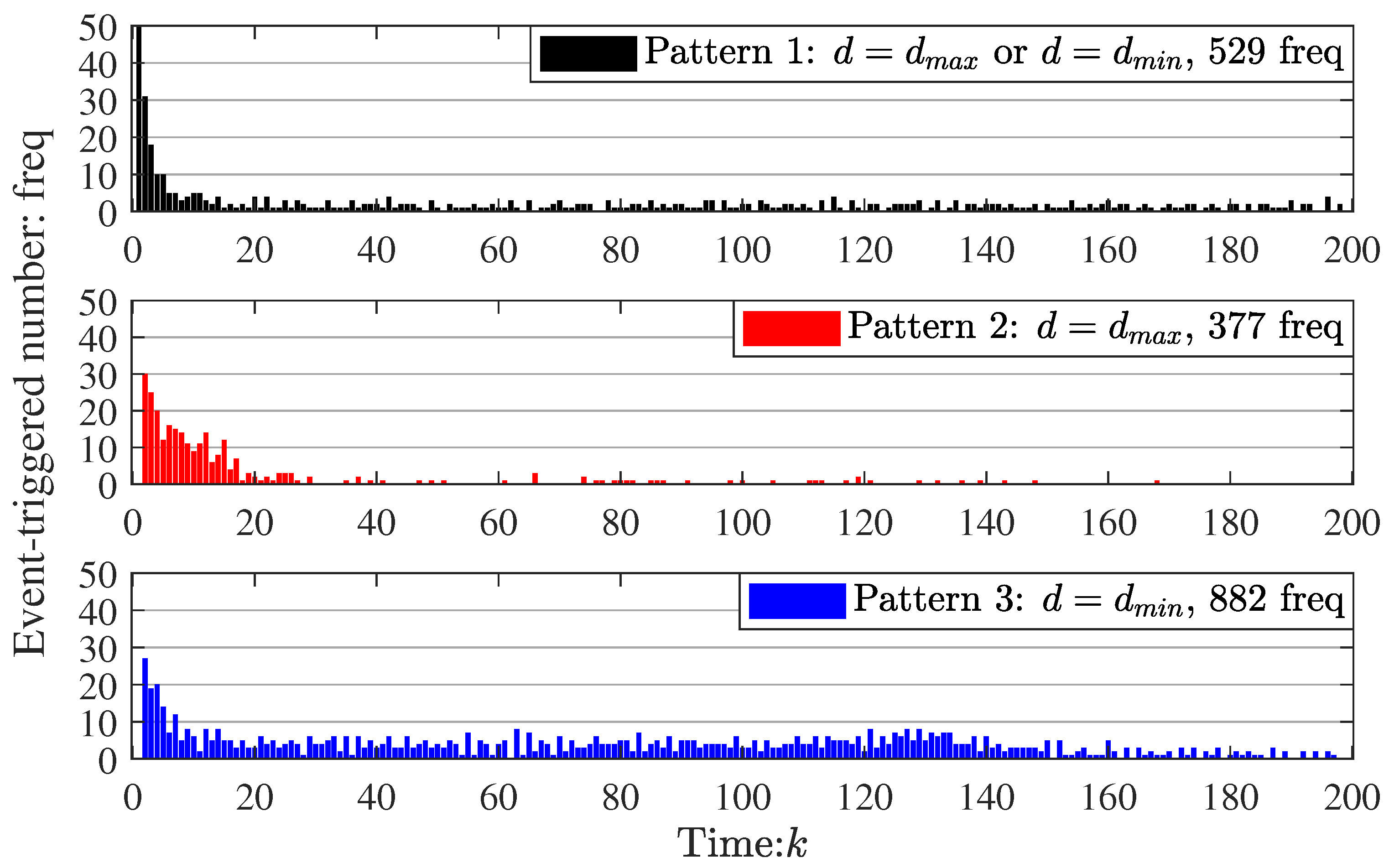
In
Figure 8, the total event-triggered frequency (TEF) in three patterns is 529 freq, 377 freq, and 882 freq, respectively, which means that the event-triggered frequency of our algorithm is medium. Compared to pattern 1 (our algorithm), the event-triggered frequency in pattern 2 is reduced by 36.30% and increased by 66.73%, respectively. Thus, our algorithm is more effective in reducing the event-triggered frequency. This suggests that the event-triggered condition proposed in this paper is helpful for energy saving.
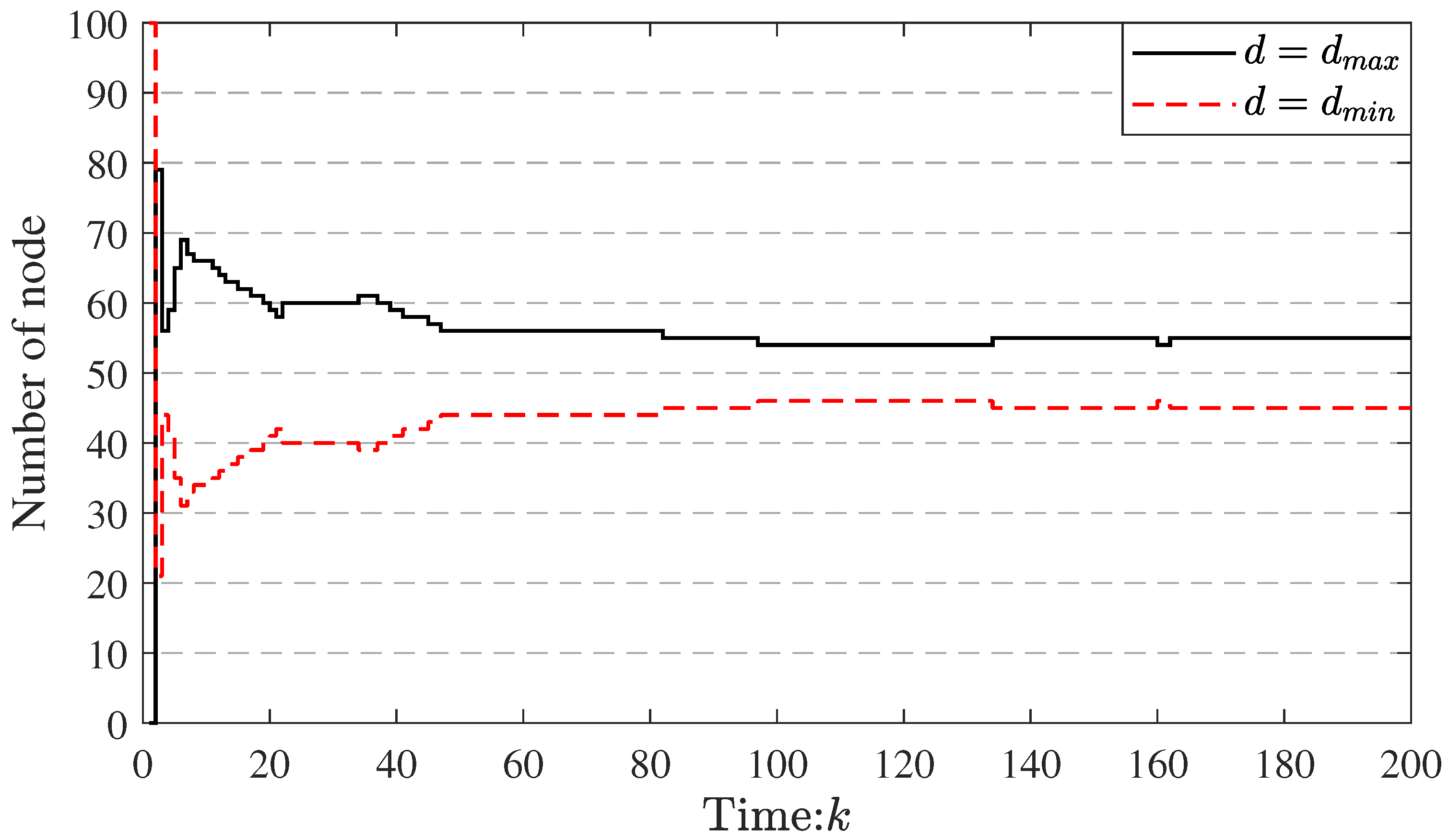
In addition, in
Figure 9, the communication radius of the nodes is switched by our algorithm, which evidences the effectiveness of the proposed topology transformation schedule. According to the proposed topology transformation schedule (see Equation (
7), if the energy consumption of node
i is lower than the local average energy consumption, the communication radius switches to the
at the next time. Otherwise, it switches to the
. Therefore, it can make more uniform energy consumption (see
Figure 6 and
Figure 7; the absolute value of the slope of the curve in pattern 1 is the smallest in the three patterns). These results further prove the effectiveness of the proposed algorithm.
In order to show the effectiveness of different parameters on the performance of WSNs, we conducted the experiment using the statistics method. The results are shown in
Table 4,
Table 5 and
Table 6.
From
Table 4, it can be observed that the total frequency increases as the packet loss rate
increases, resulting in an increase in filtering accuracy but a decrease in the lifetime of WSNs. Additionally,
Table 5 indicates that the total frequency decreases as the event-triggered threshold
increases, resulting in a decrease in filtering accuracy but an increase in the lifetime of WSNs.
Table 6 shows that the timeliness window
contributes to improved filtering accuracy and the lifetime of WSNs, but larger values of
have a negative impact on them. Thus, we need to adjust the parameters to obtain the desired filtering accuracy and the expected lifetime WSNs.
6. Conclusions
In this paper, based on the timeliness window, an energy-saving distributed consensus Kalman filter with a dual event-driven strategies was designed for WSNs. It is a comprehensive algorithm for saving energy and for uniform energy consumption. On the one hand, the proposed event-triggered schedule based on the timeliness window saves energy, satisfying the filtering accuracy. On the other hand, the topological transformation schedule, which chiefly controls the topology structure, was designed according to the energy consumption model. To be more specific, it is able to switch the communication radius according to the proposed topology transformation schedule, which makes the energy consumption uniform. The following are the highlights of this paper:
The unique dual event-driven strategy was designed to balance the filtering accuracy and the energy consumption. Using the proposed dual event-driven strategy, the lifetime of WSNs can be extended by about 40%.
A novel distributed consensus Kalman filter was designed based on the two schedules; sufficient conditions for the stability of the filter are given.
Simulation tests have demonstrated the effectiveness of the proposed event-triggered schedule and topology transformation schedule in achieving a better trade-off between estimated accuracy and energy-saving by adjusting various parameters, ultimately leading to a prolonged lifetime of WSNs. However, there is a problem in that the proposed algorithm depends on the choice of parameters. The different parameters can lead to significant changes in the performance of the proposed algorithm. It is widely known that the intelligent optimization algorithm can be used to adjust the parameters to obtain the desired performance indicators. Thus, it is natural to expect that it will be solved by the intelligent optimization algorithm in future works.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}