

A Data-Driven System Identification Method for Random Eigenvalue Problem Using Synchrosqueezed Energy and Phase Portrait Analysis

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Uncertainty Propagation through Eigen Value Problems
2.1. Perturbation Approach
2.2. Asymptotic Integral Approach
2.3. Objectives for the Inverse Data-Driven Identification
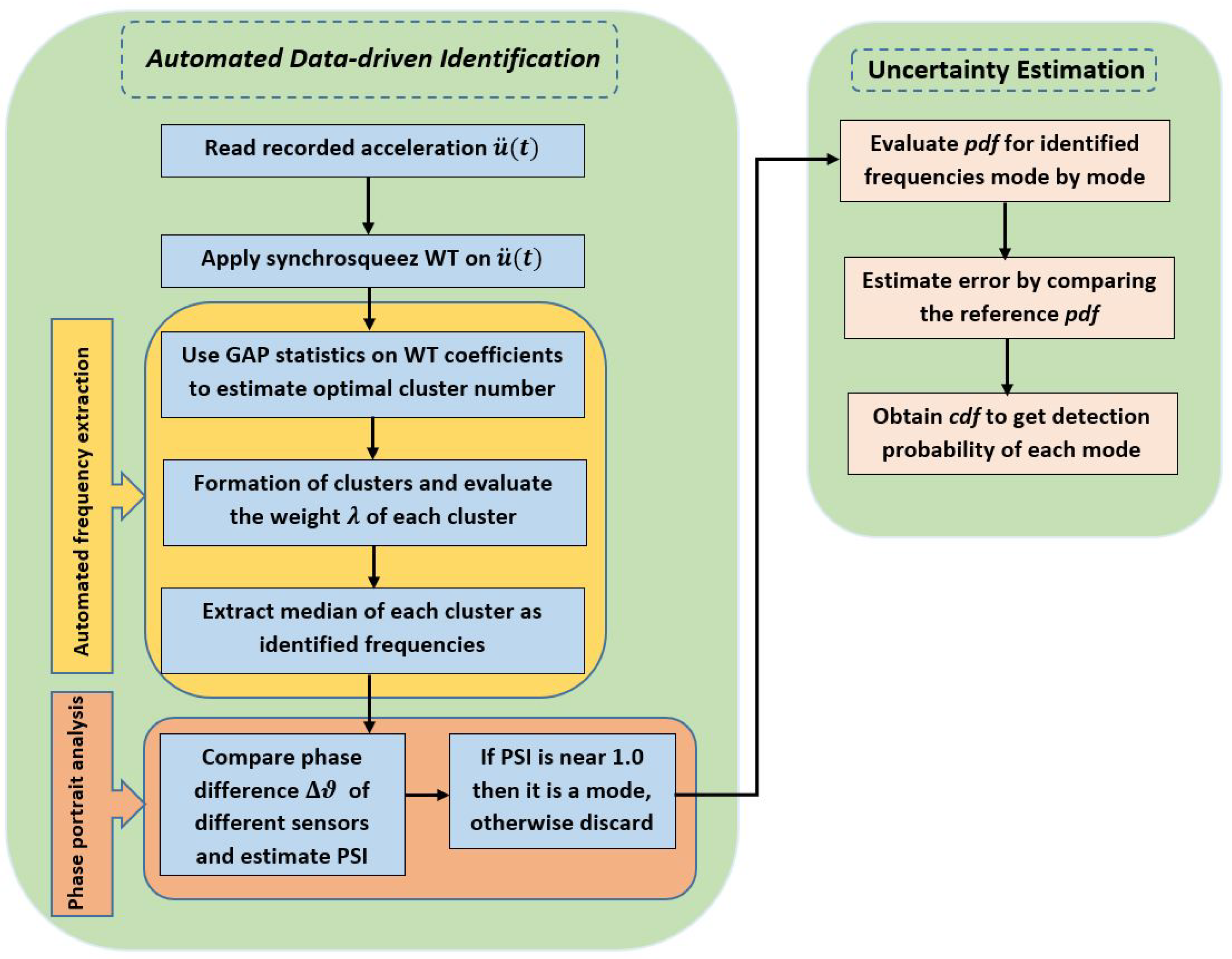
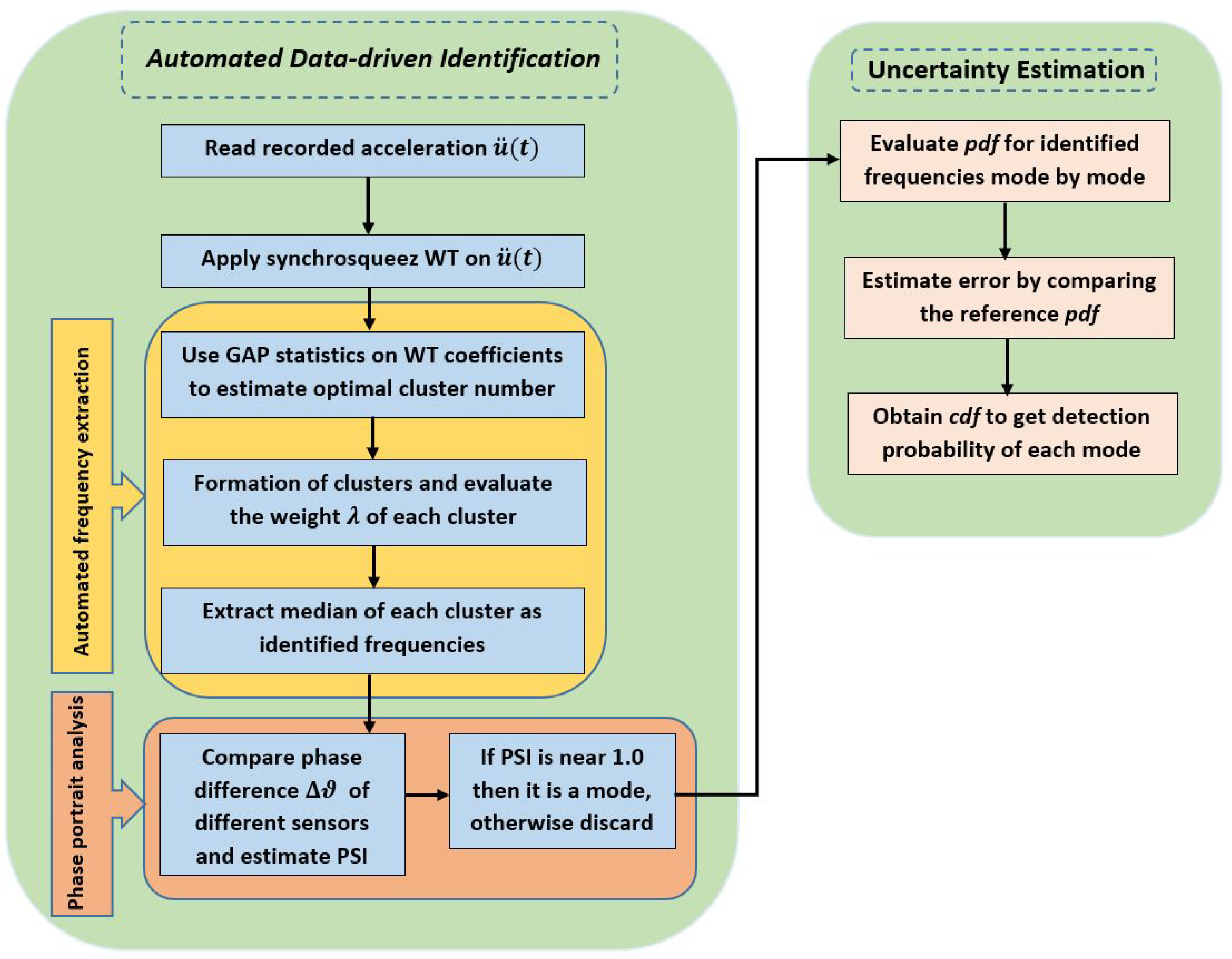
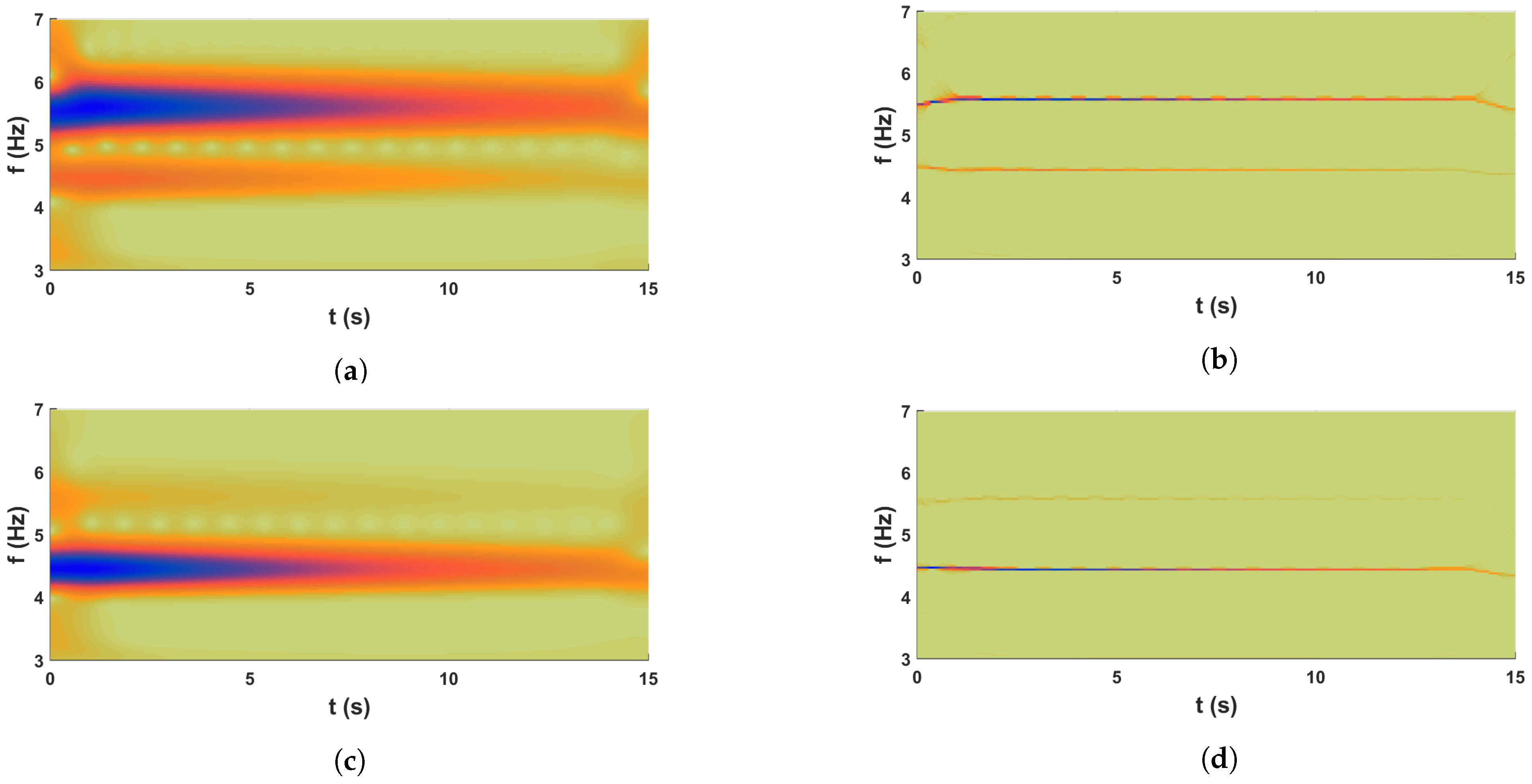
- Develop an efficient output-only signal processing tool that can identify the modal parameters from the measured acceleration responses without any user intervention. The reason behind this approach is to automate the process, where a large number of tests are necessary for handling stochastic structural systems. This is achieved by synchrosqueezed transform in this work, which offers improved resolution in the time-frequency domain compared to wavelet-based signal processing.
- Since a single measurement is an outcome of a random process, it is proposed to be repeated for an ensemble and the extraction of the modal features for the complete set is automated with the help of a clustering algorithm. In this context, k-means clustering is adopted for unsupervised learning of the spectrogram obtained from synchrosqueezed transformation, which reflects arrange the modal energy in the time-frequency plane. This step is as important as the accurate estimation of modal parameters in the previous step, as it helps to manage large data produced from repeated trials.
- Once this data-driven process is repeated for the ensemble, the underlying randomness of the modal parameters is quantified by the pdf of these parameters, which is experimentally verified to study the efficiency and accuracy of the proposed identification strategy for the random eigenvalues.
3. Inverse Analysis of Random Eigen Values
3.1. Continuous Wavelet Transform & Synchrosqueezing
3.2. Proposed Energy and Phase Portrait Analysis for Inverse Random Eigen Value Problem
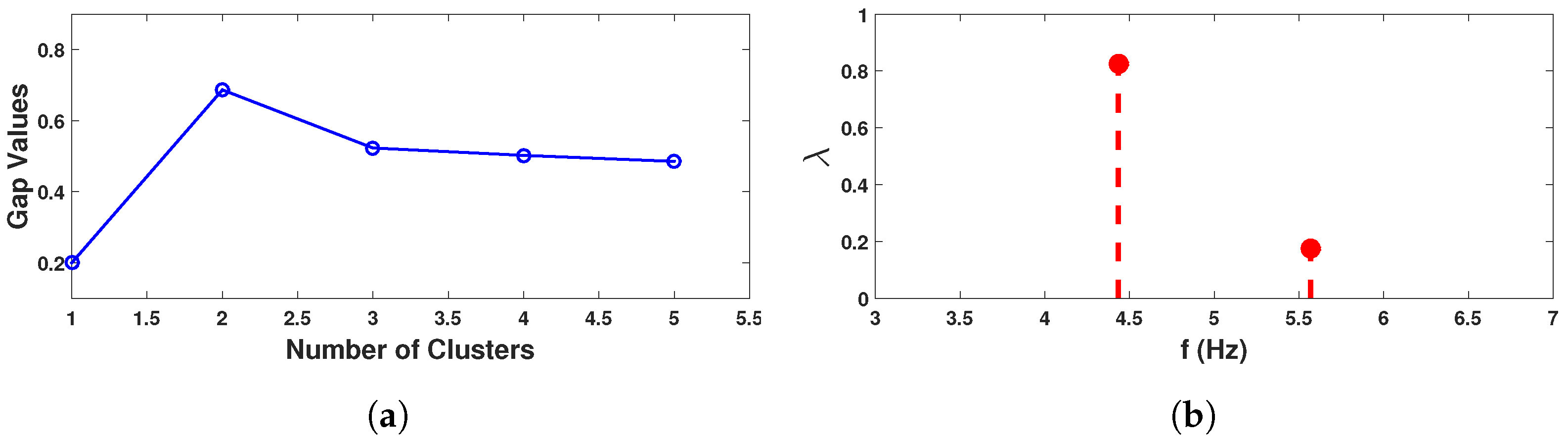
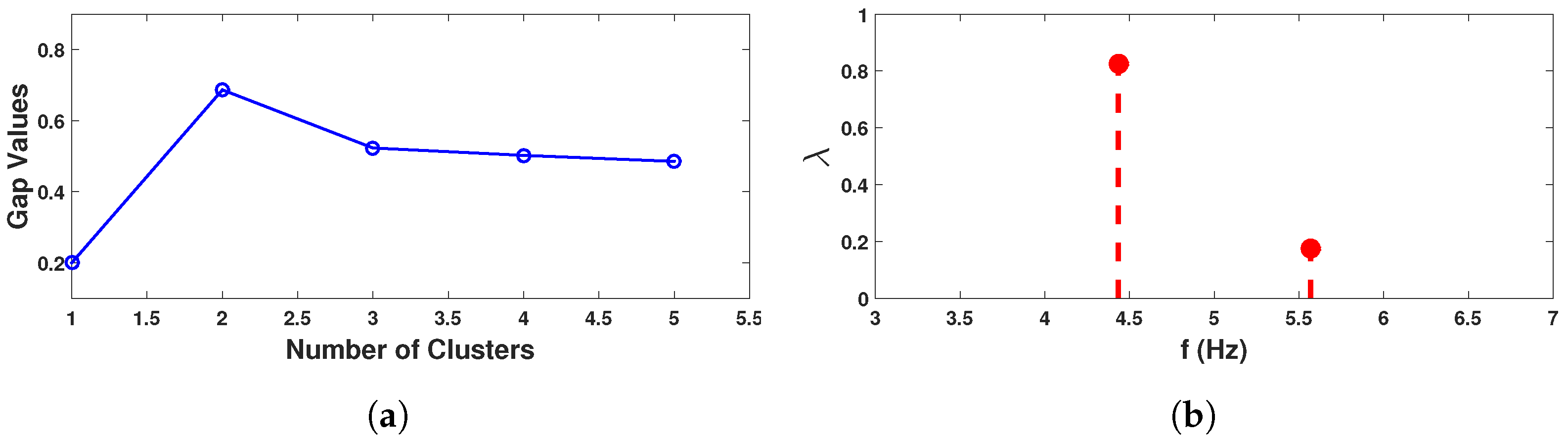
3.3. Proposed Automated Data-Driven Identification
- Assignment: Each data point is assigned to the appropriate Vononoi cell based on the nearest cluster mean
- Update: Once the assignment is completed, the cluster means are updated as follows
3.4. Error Analysis
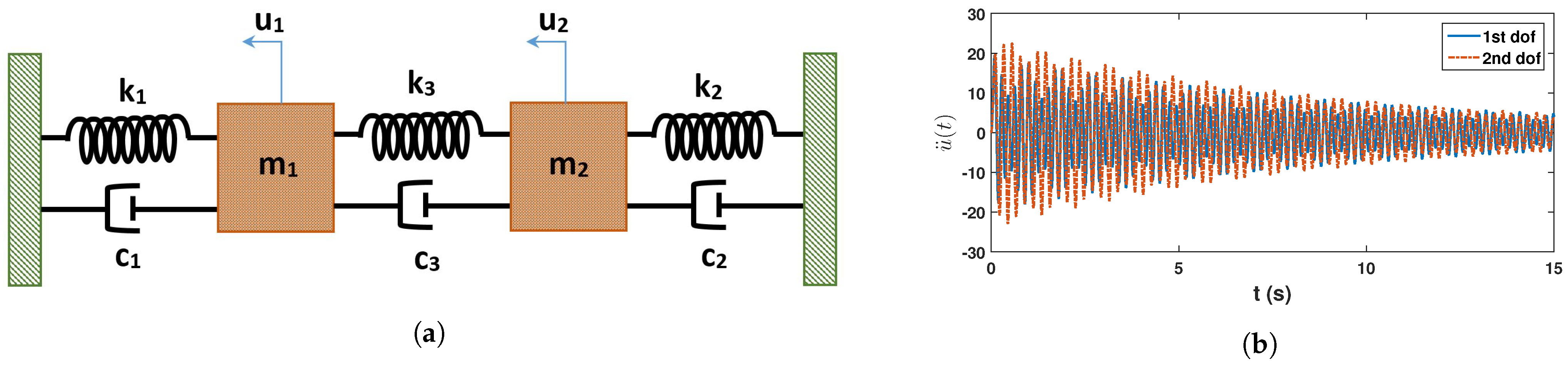
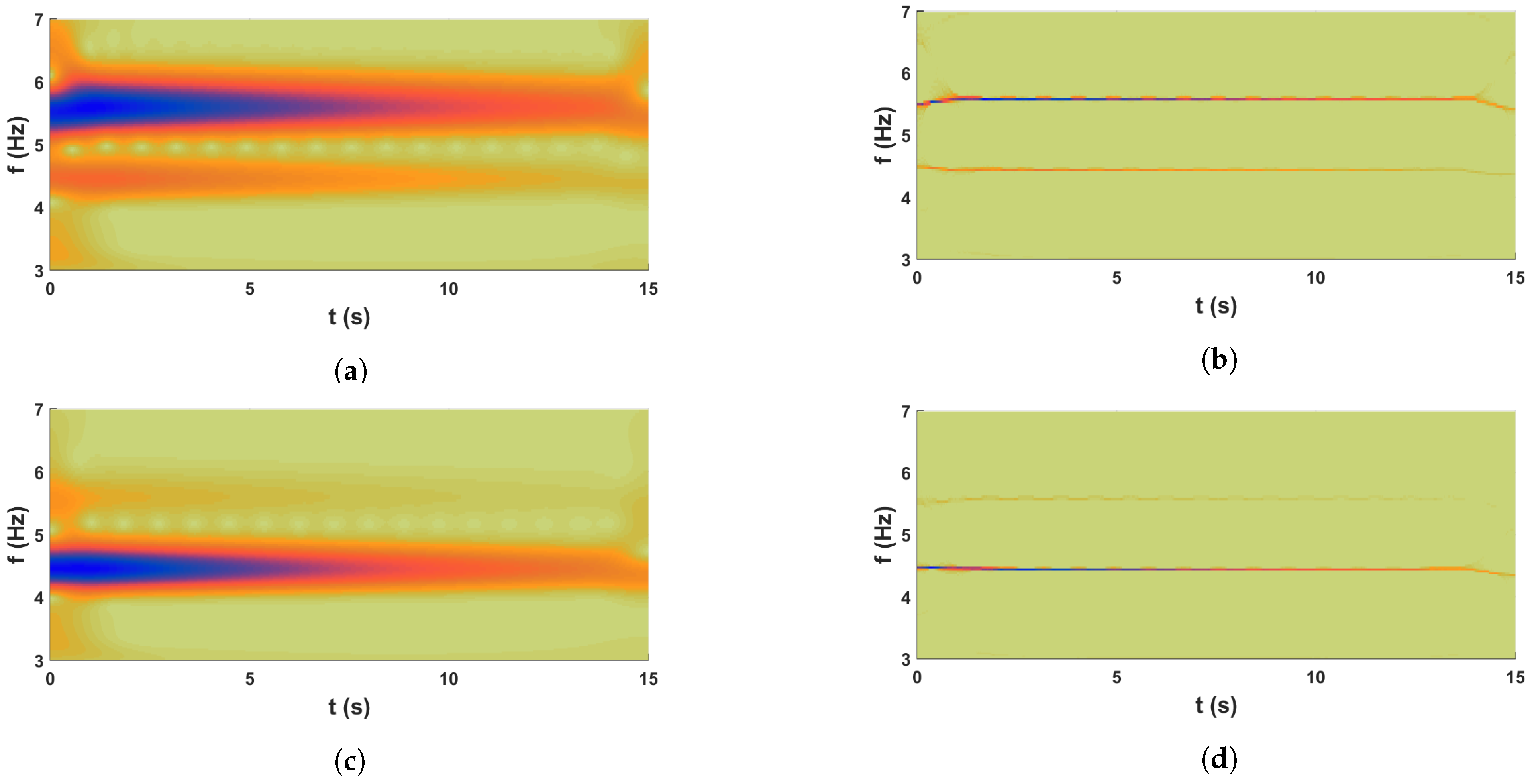
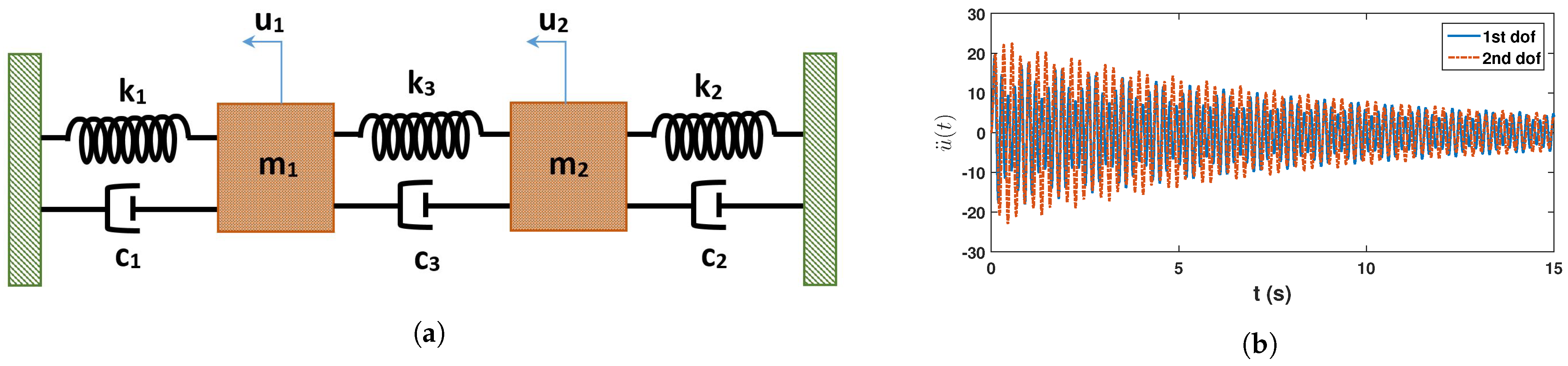
4. Validation with Synthetic Experiment: 2DOF System
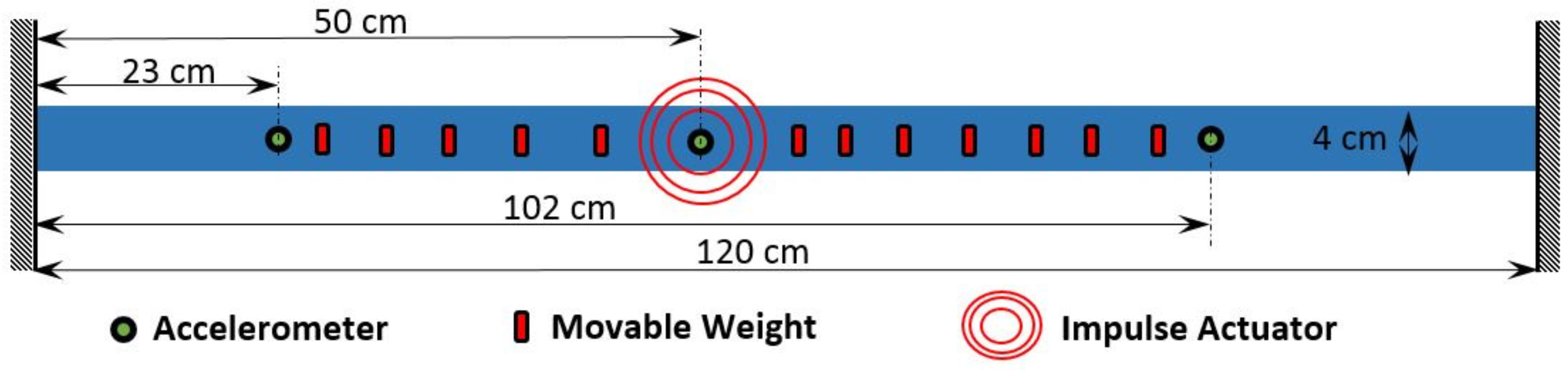
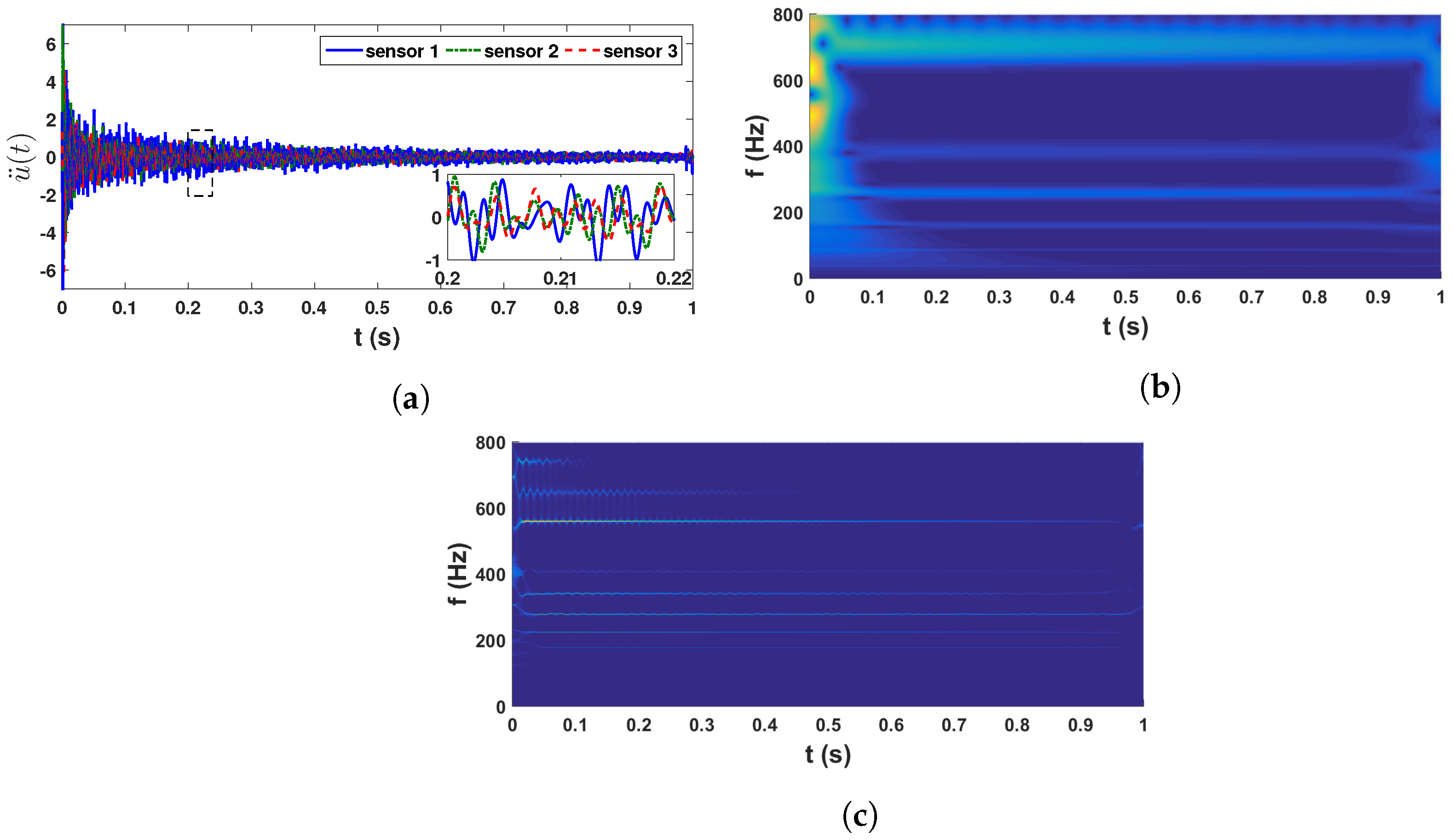
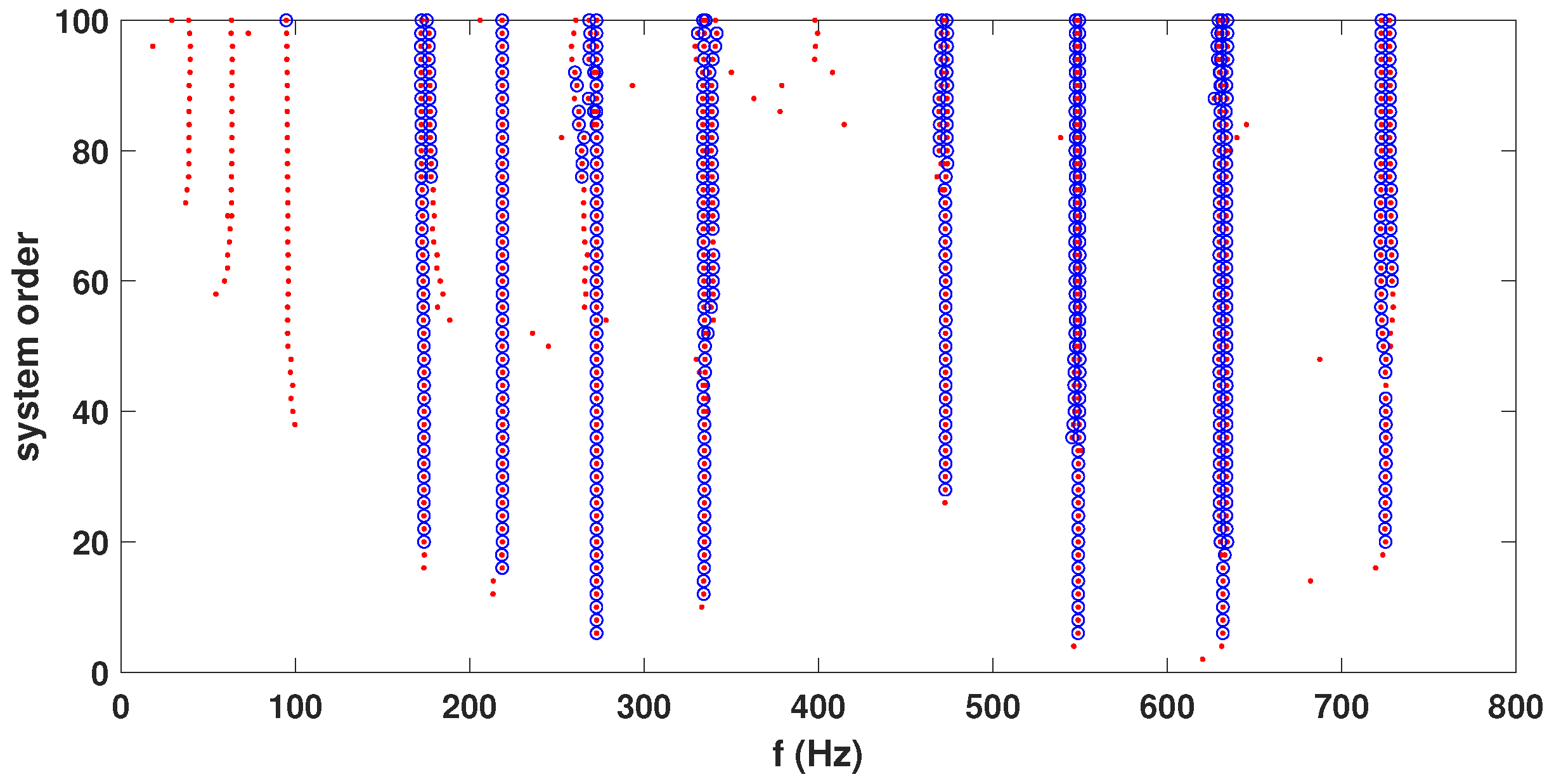
5. Experimental Verification: Beam with Random Parameter
6. Conclusions
- Overall, the proposed data-driven identification scheme can successfully track the eigenvalues of an uncertain linear system from the measured responses with sufficient accuracy. The automated methodology is primarily based on the synchrosqueezed transform, which offers an improved resolution of the energy and phase spectra, which are analyzed with the help of k-means clustering for mode localization and subsequent parameter estimation. This entire process does not require either any prior knowledge of the system and/or input nor any user intervention for reverse analysis, which is clearly an advantage compared to other similar methods available in the literature.
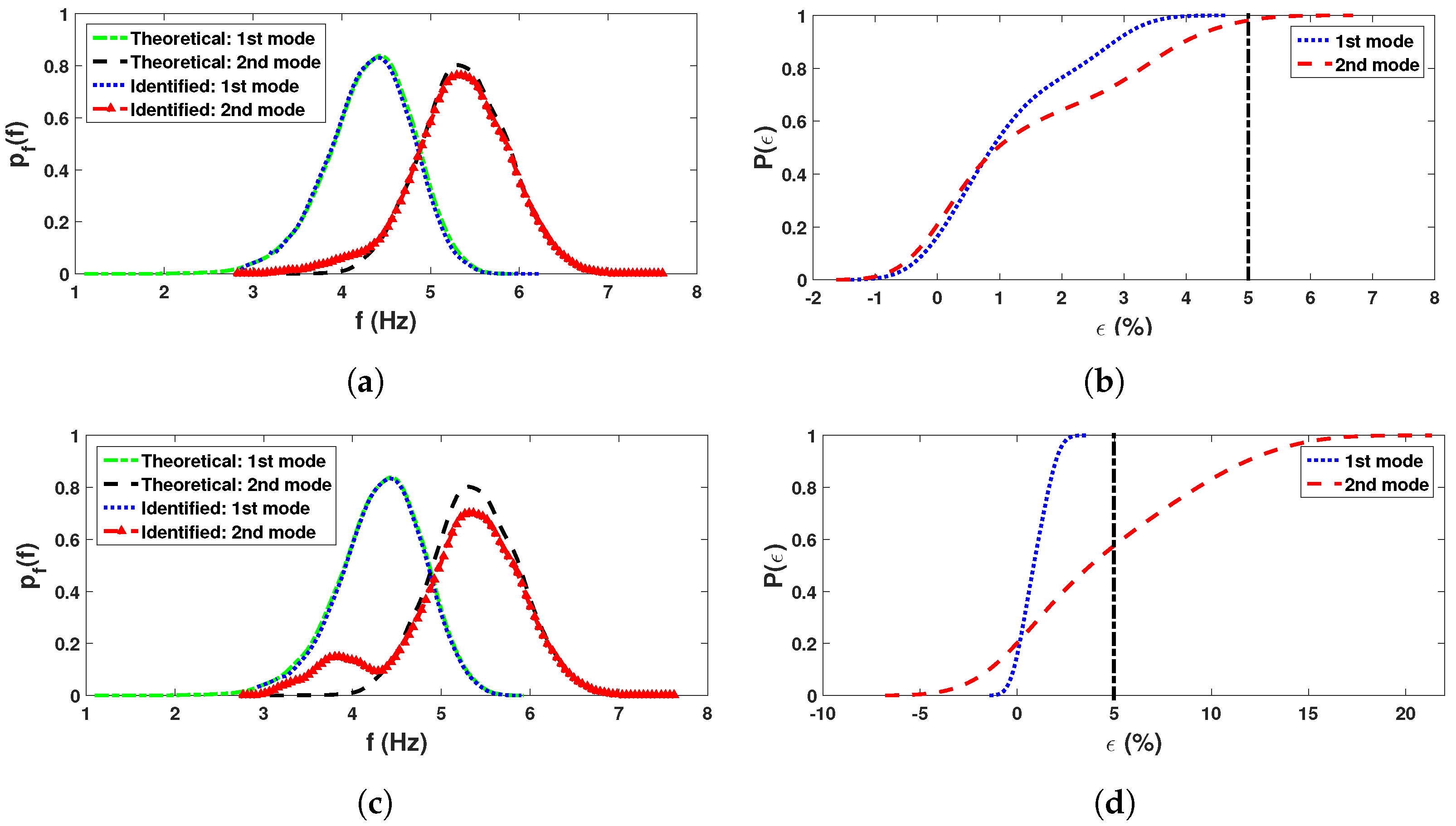
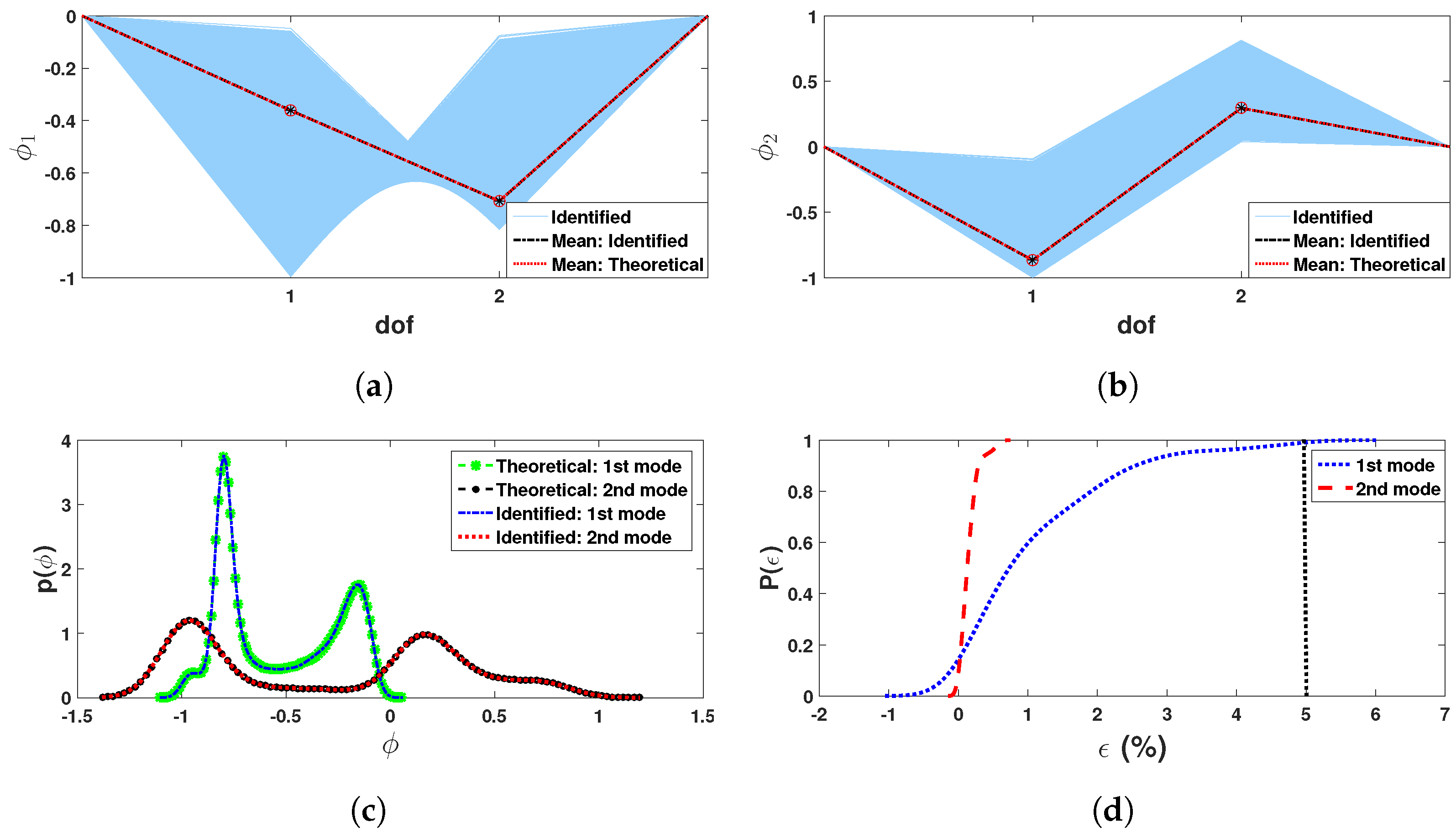
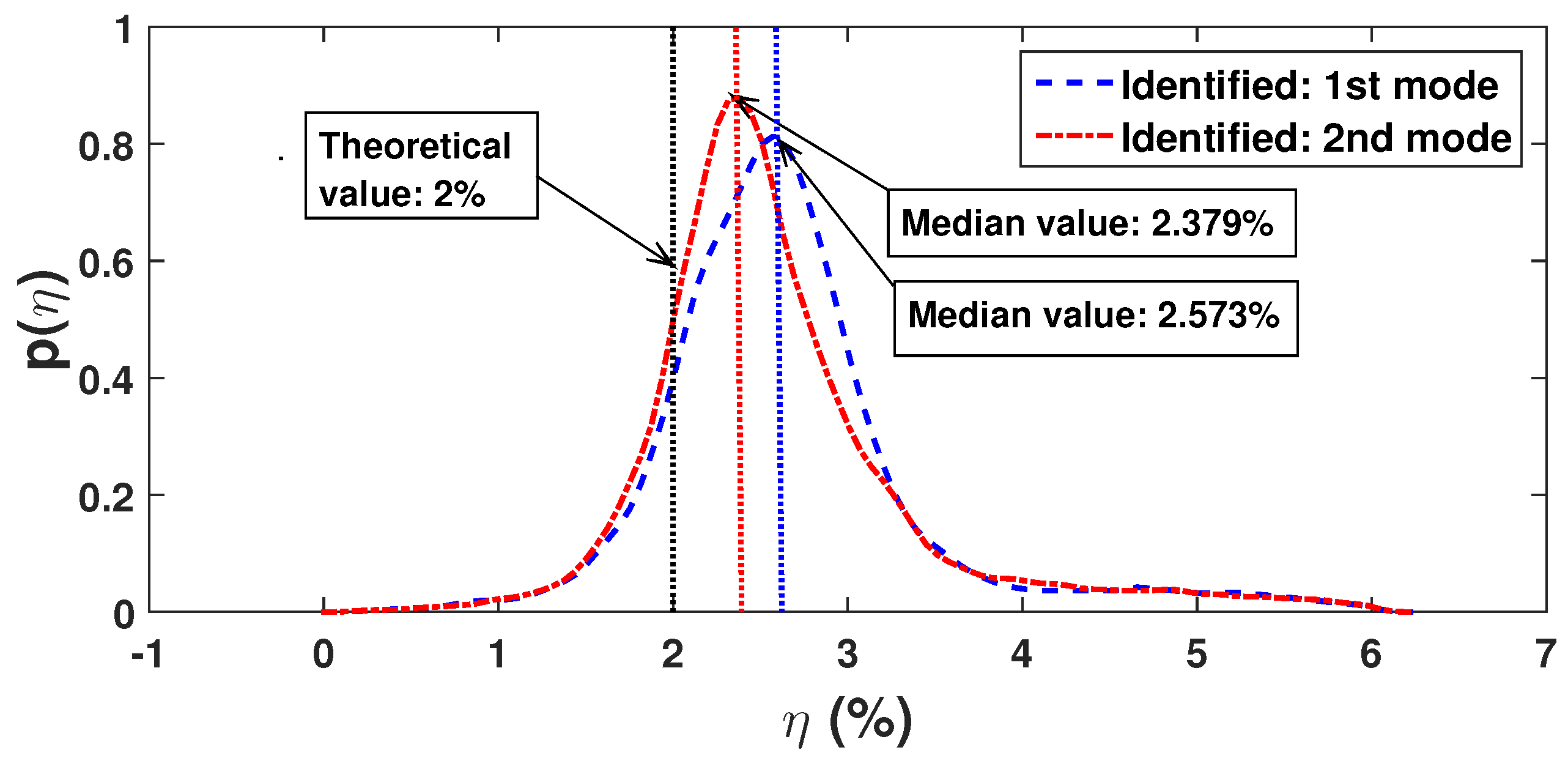
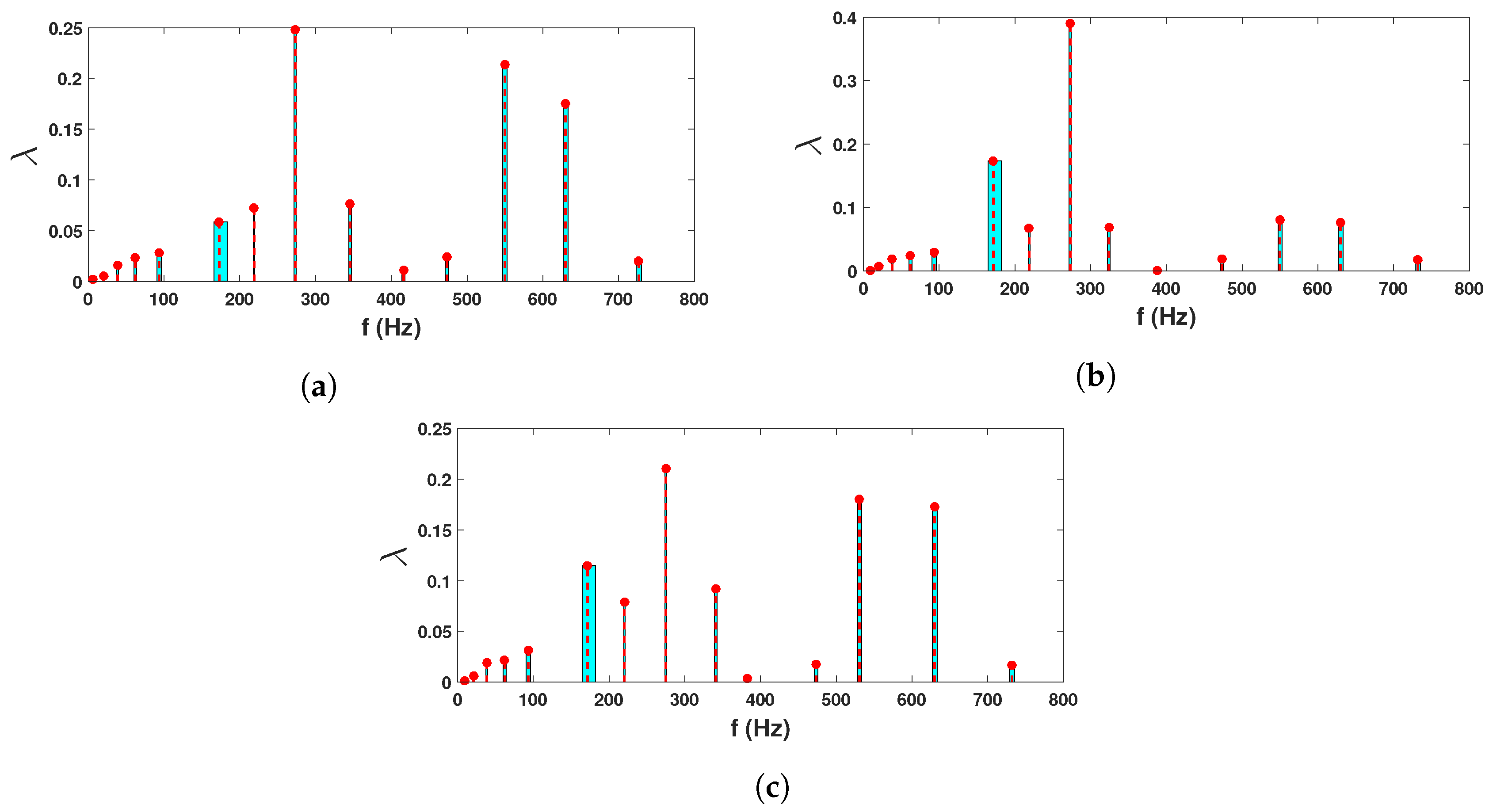
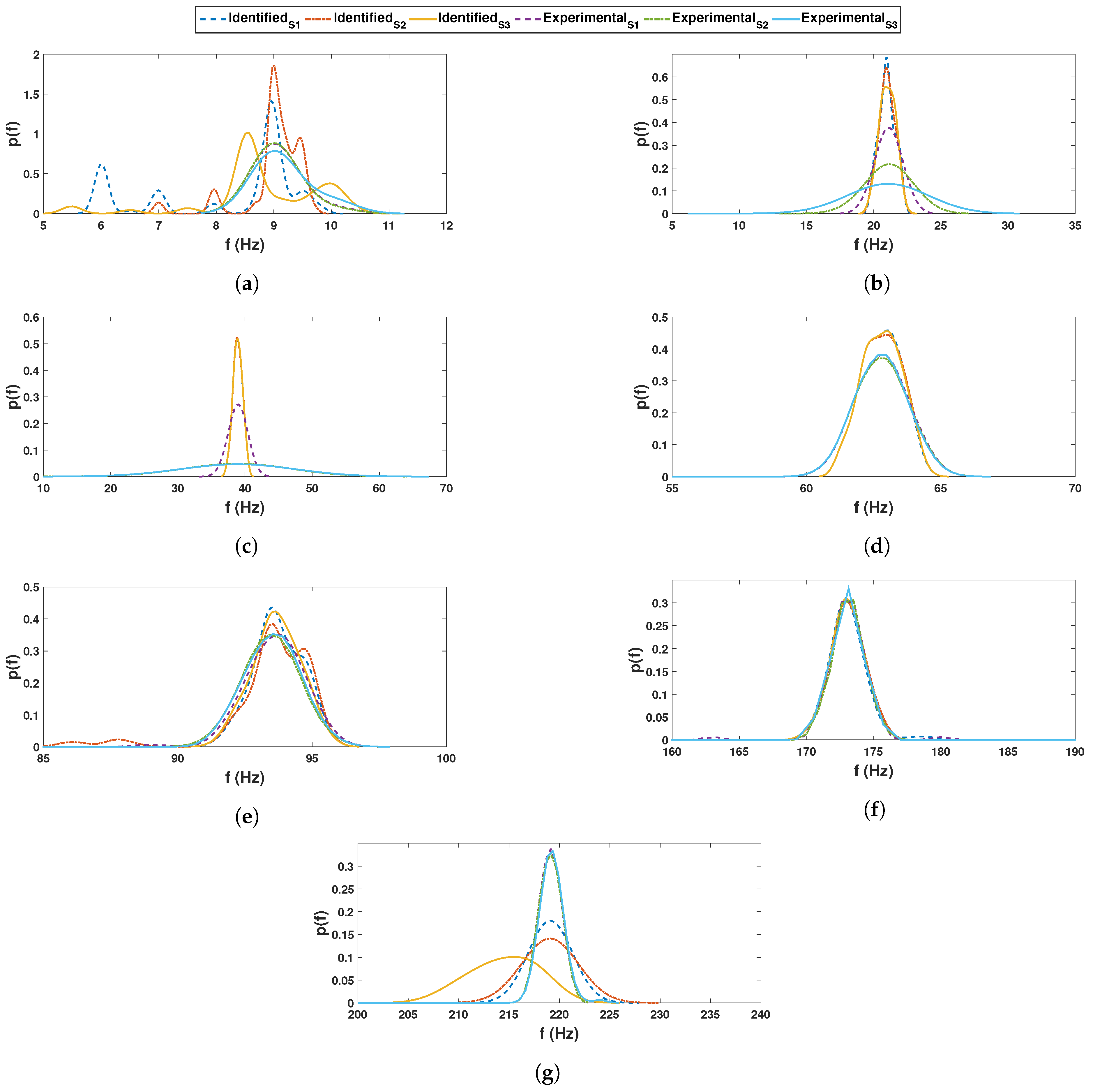
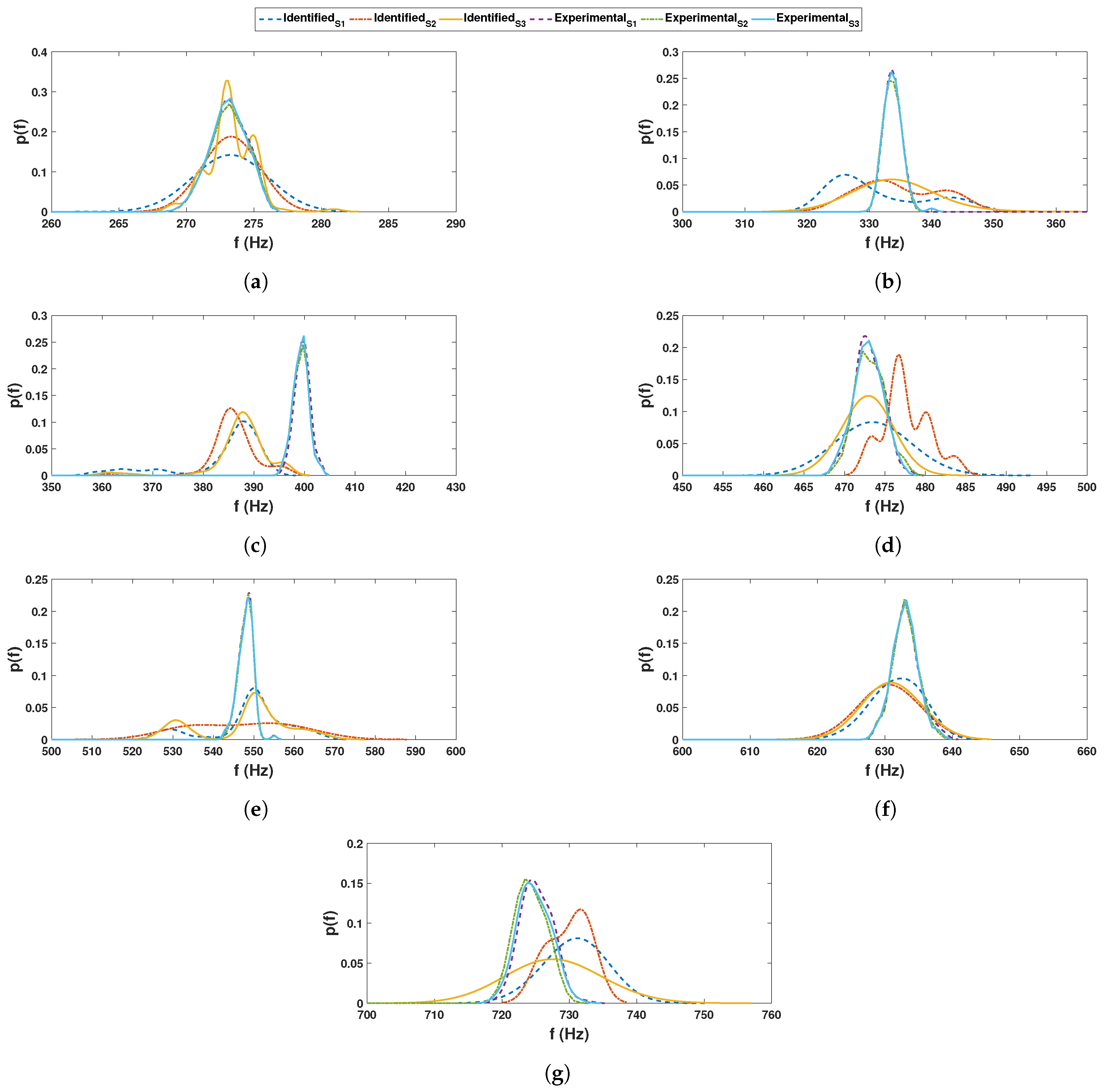
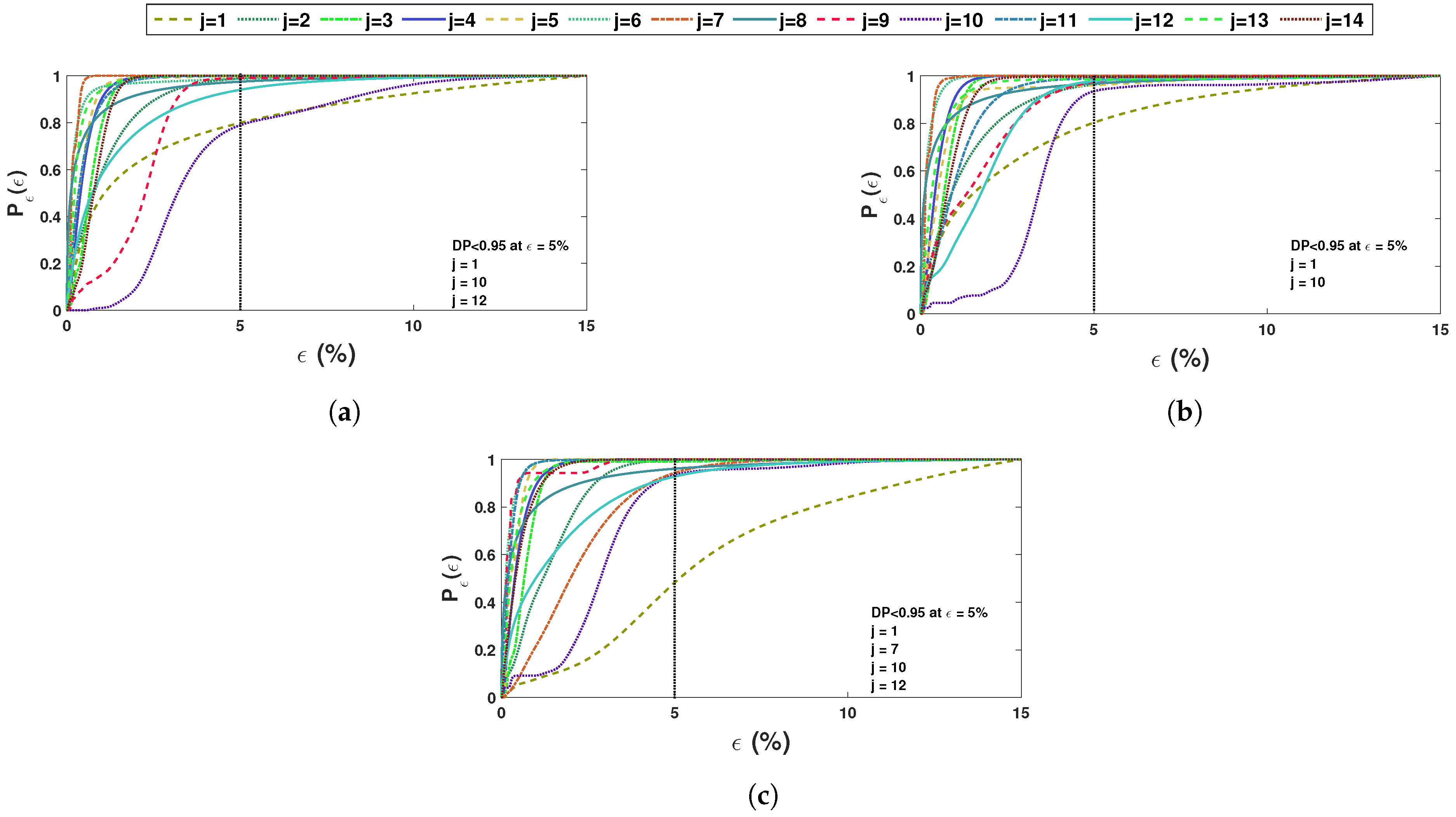
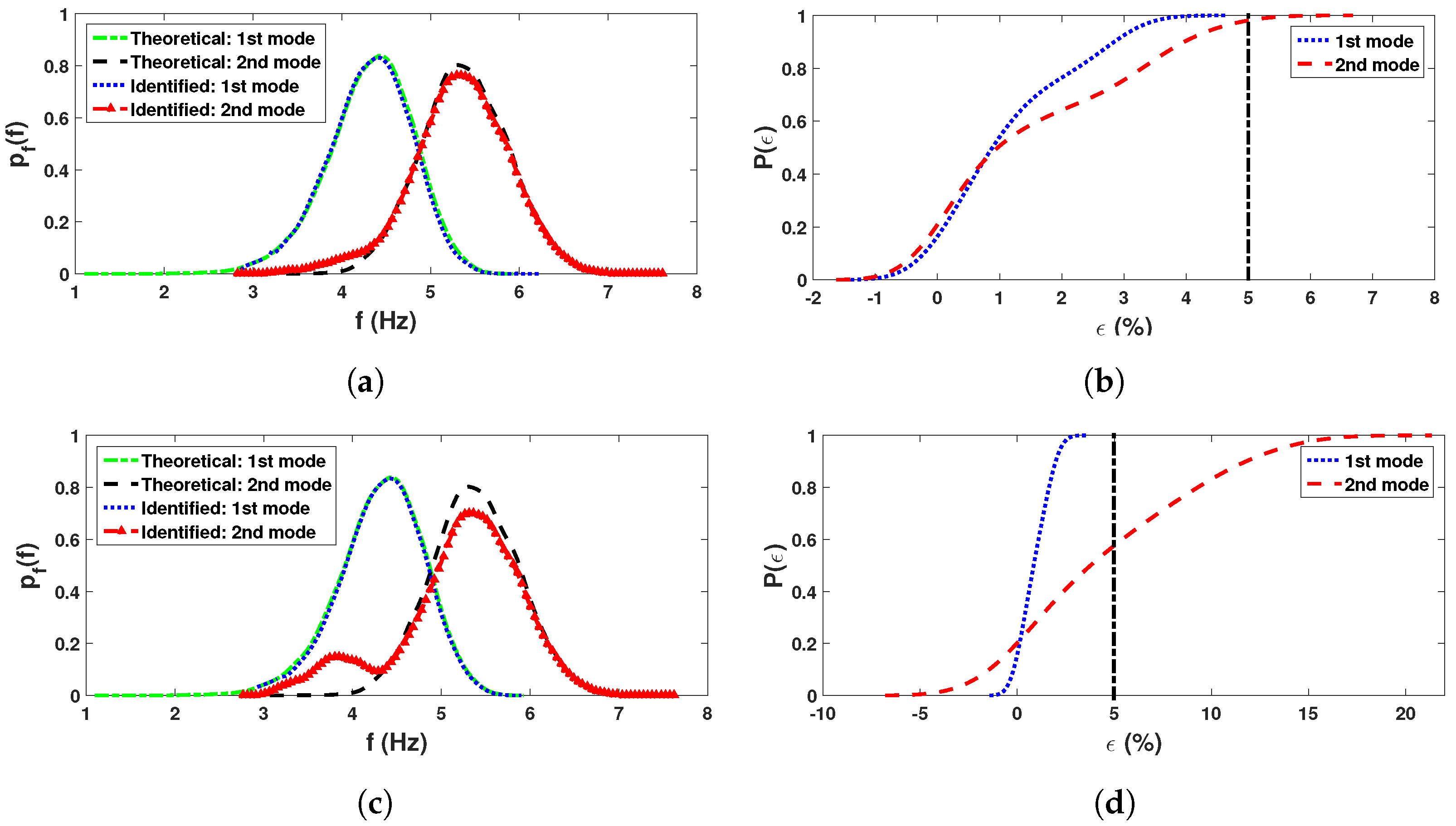
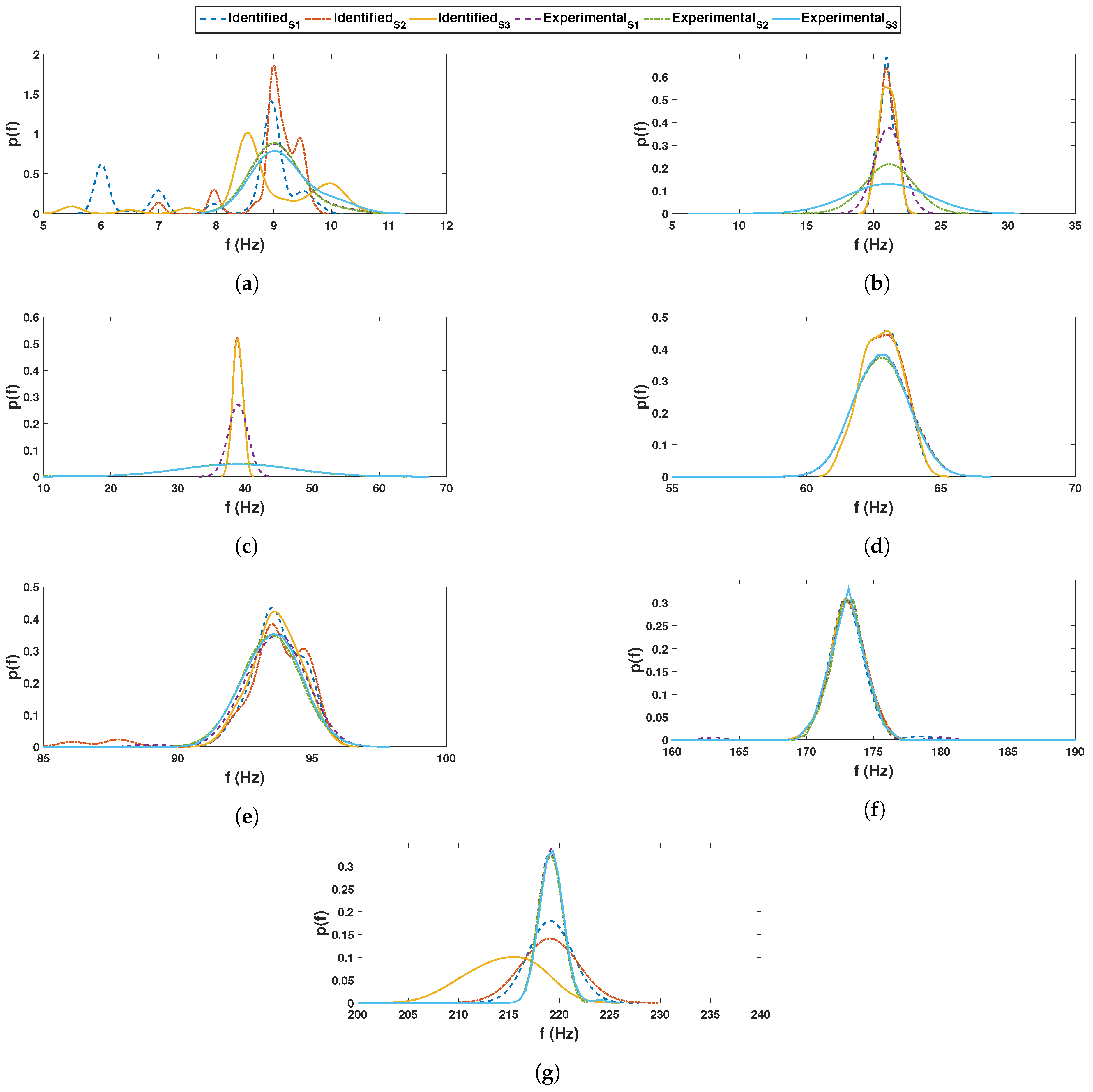
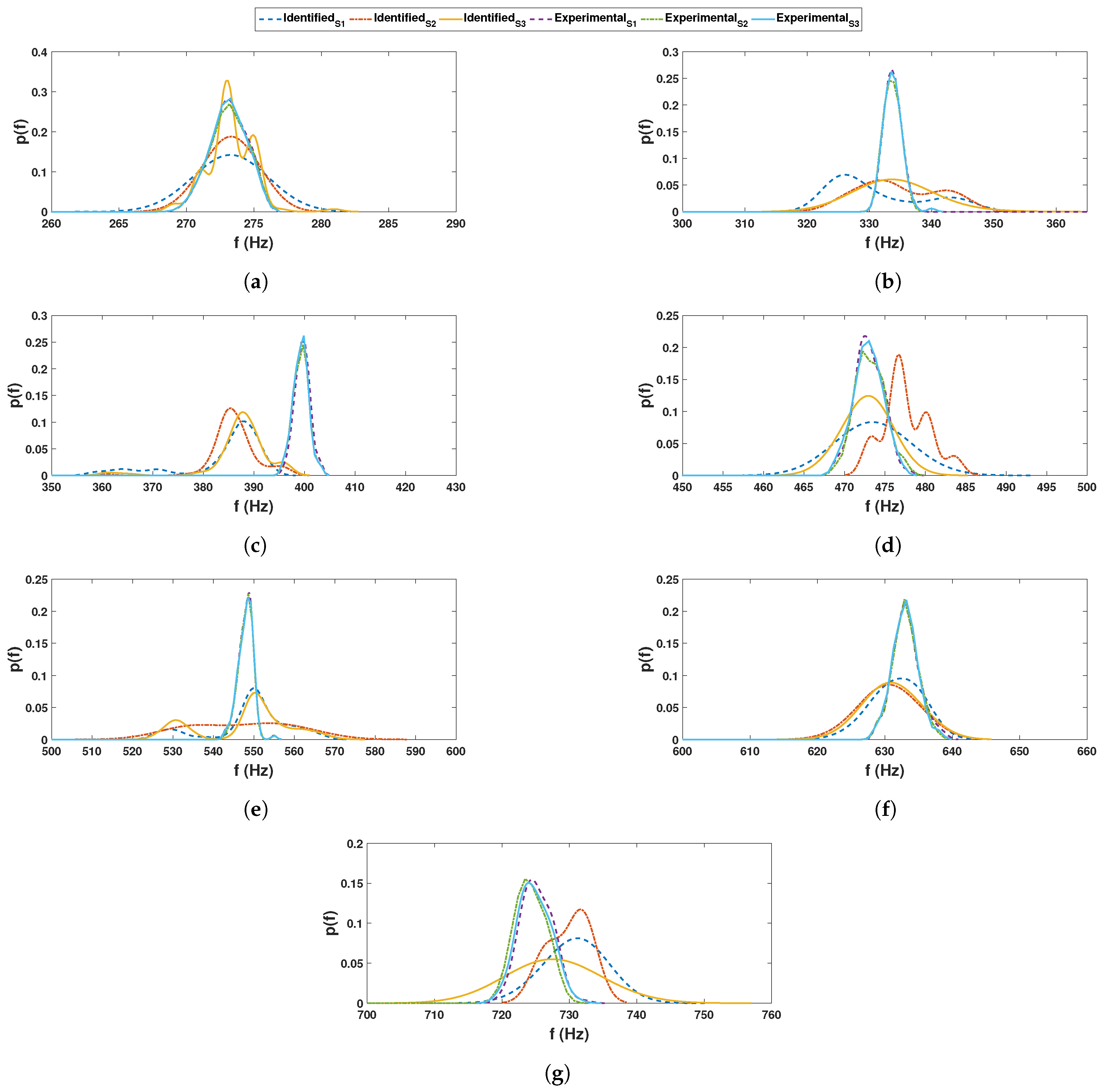
- The error analysis establishes the precision offered by the proposed identification scheme, as the pdfs of different modal parameters closely match their theoretical models. The error CDF also shows the probability of successful detection of a particular mode corresponding to the acceptable error limit. For example, the probability of detection is greater than in most cases, corresponds to an error of , acceptable for all practical purposes. The error value mentioned here is composed of two errors: detection and system uncertainty. It is extremely rare to distinguish between these two types of errors in practical application. It is also observed that the success rate of detecting a few frequencies from a particular sensor is poor; however, the same frequency is successfully identified with a high level of accuracy from another sensor. Thus, the study demonstrates that sensor locations affect the quality of the end results, which, in turn, advocates deciding the optimal sensor location in a probabilistic sense.
- Unlike many other learning-based algorithms, the proposed methodology requires no training data or pre-tuning for the model. For this reason, the proposed automated data-driven identification scheme has a broader scope for the inverse parameter estimation of a large class of systems in different sciences and engineering disciplines. It has a wider scope for alternative parameter estimation. Due to being able to detect small changes in modal parameters, it is inherently capable of detecting subtle changes, allowing it to be used to identify damages and control vibrations based on feedback within structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abdulkareem, M.; Bakhary, N.; Vafaei, M.; Noor, N.M.; Padil, K.H. Non-probabilistic wavelet method to consider uncertainties in structural damage detection. J. Sound Vib. 2018, 433, 77–98. [Google Scholar] [CrossRef]
- Adhikari, S.; Pastur, L.; Lytova, A.; Du Bois, J. Eigenvalue density of linear stochastic dynamical systems: A random matrix approach. J. Sound Vib. 2012, 331, 1042–1058. [Google Scholar] [CrossRef]
- Adhikari, S.; Sarkar, A. Uncertainty in structural dynamics: Experimental validation of a Wishart random matrix model. J. Sound Vib. 2009, 323, 802–825. [Google Scholar] [CrossRef]
- Pintelon, R.; Guillaume, P.; Schoukens, J. Uncertainty calculation in (operational) modal analysis. Mech. Syst. Signal Process. 2007, 21, 2359–2373. [Google Scholar] [CrossRef]
- Goulet, J.A.; Coutu, S.; Smith, I.F. Model falsification diagnosis and sensor placement for leak detection in pressurized pipe networks. Adv. Eng. Inform. 2013, 27, 261–269. [Google Scholar] [CrossRef] [Green Version]
- Reynders, E.; Pintelon, R.; De Roeck, G. Uncertainty bounds on modal parameters obtained from stochastic subspace identification. Mech. Syst. Signal Process. 2008, 22, 948–969. [Google Scholar] [CrossRef]
- Reynders, E.; Maes, K.; Lombaert, G.; De Roeck, G. Uncertainty quantification in operational modal analysis with stochastic subspace identification: Validation and applications. Mech. Syst. Signal Process. 2016, 66, 13–30. [Google Scholar] [CrossRef]
- Neu, E.; Janser, F.; Khatibi, A.A.; Orifici, A.C. Fully automated operational modal analysis using multi-stage clustering. Mech. Syst. Signal Process. 2017, 84, 308–323. [Google Scholar] [CrossRef]
- Tronci, E.; De Angelis, M.; Betti, R.; Altomare, V. Multi-stage semi-automated methodology for modal parameters estimation adopting parametric system identification algorithms. Mech. Syst. Signal Process. 2022, 165, 108317. [Google Scholar] [CrossRef]
- Peeters, B.; De Roeck, G. Reference-based stochastic subspace identification for output-only modal analysis. Mech. Syst. Signal Process. 1999, 13, 855–878. [Google Scholar] [CrossRef] [Green Version]
- Döhler, M.; Mevel, L. Efficient multi-order uncertainty computation for stochastic subspace identification. Mech. Syst. Signal Process. 2013, 38, 346–366. [Google Scholar] [CrossRef]
- Komarizadehasl, S.; Huguenet, P.; Lozano, F.; Lozano-Galant, J.A.; Turmo, J. Operational and Analytical Modal Analysis of a Bridge Using Low-Cost Wireless Arduino-Based Accelerometers. Sensors 2022, 22, 9808. [Google Scholar] [CrossRef]
- Carne, T.G.; James, G.H., III. The inception of OMA in the development of modal testing technology for wind turbines. Mech. Syst. Signal Process. 2010, 24, 1213–1226. [Google Scholar] [CrossRef] [Green Version]
- Foti, D.; Giannoccaro, N.I.; Vacca, V.; Lerna, M. Structural operativity evaluation of strategic buildings through finite element (FE) models validated by operational modal analysis (OMA). Sensors 2020, 20, 3252. [Google Scholar] [CrossRef] [PubMed]
- Au, S.K. Uncertainty law in ambient modal identification—Part I: Theory. Mech. Syst. Signal Process. 2014, 48, 15–33. [Google Scholar] [CrossRef] [Green Version]
- Au, S.K. Uncertainty law in ambient modal identification—Part II: Implication and field verification. Mech. Syst. Signal Process. 2014, 48, 34–38. [Google Scholar] [CrossRef] [Green Version]
- Au, S.K.; Brownjohn, J.M.; Mottershead, J.E. Quantifying and managing uncertainty in operational modal analysis. Mech. Syst. Signal Process. 2018, 102, 139–157. [Google Scholar] [CrossRef] [Green Version]
- Au, S.K.; Brownjohn, J.M. Asymptotic identification uncertainty of close modes in Bayesian operational modal analysis. Mech. Syst. Signal Process. 2019, 133, 106273. [Google Scholar] [CrossRef]
- Ghiasi, R.; Noori, M.; Altabey, W.A.; Silik, A.; Wang, T.; Wu, Z. Uncertainty handling in structural damage detection via non-probabilistic meta-models and interval mathematics, a data-analytics approach. Appl. Sci. 2021, 11, 770. [Google Scholar] [CrossRef]
- Padil, K.H.; Bakhary, N.; Abdulkareem, M.; Li, J.; Hao, H. Non-probabilistic method to consider uncertainties in frequency response function for vibration-based damage detection using artificial neural network. J. Sound Vib. 2020, 467, 115069. [Google Scholar] [CrossRef]
- Mugnaini, V.; Fragonara, L.Z.; Civera, M. A machine learning approach for automatic operational modal analysis. Mech. Syst. Signal Process. 2022, 170, 108813. [Google Scholar] [CrossRef]
- Charbonnel, P.É. Fuzzy-driven strategy for fully automated modal analysis: Application to the SMART2013 shaking-table test campaign. Mech. Syst. Signal Process. 2021, 152, 107388. [Google Scholar] [CrossRef]
- Mo, J.; Wang, L.; Gu, K. A two-step interval structural damage identification approach based on model updating and set-membership technique. Measurement 2021, 182, 109464. [Google Scholar] [CrossRef]
- Niu, Z.; Zhu, H.; Huang, X.; Che, A.; Fu, S.; Meng, S.; Han, Z. Uncertainty quantification method for elastic wave tomography of concrete structure using interval analysis. Measurement 2022, 205, 112160. [Google Scholar] [CrossRef]
- Rogers, L.C. Derivatives of eigenvalues and eigenvectors. AIAA J. 1970, 8, 943–944. [Google Scholar] [CrossRef]
- Rudisill, C.S. Derivatives of eigenvalues and eigenvectors for a general matrix. AIAA J. 1974, 12, 721–722. [Google Scholar] [CrossRef]
- Song, D.; Chen, S.; Qiu, Z. Stochastic sensitivity analysis of eigenvalues and eigenvectors. Comput. Struct. 1995, 54, 891–896. [Google Scholar] [CrossRef]
- Nair, P.B.; Keane, A.J.; S, L.R. Improved First-Order Approximation of Eigenvalues and Eigenvectors. AIAA J. 1998, 36, 1721–1727. [Google Scholar] [CrossRef]
- Pradlwarter, H.; Schuëller, G.; Szekely, G. Random eigenvalue problems for large systems. Comput. Struct. 2002, 80, 2415–2424. [Google Scholar] [CrossRef]
- Yan, B.; Miyamoto, A.; Brühwiler, E. Wavelet transform-based modal parameter identification considering uncertainty. J. Sound Vib. 2006, 291, 285–301. [Google Scholar] [CrossRef]
- Adhikari, S.; Friswell, M. Random matrix eigenvalue problems in structural dynamics. Int. J. Numer. Methods Eng. 2007, 69, 562–591. [Google Scholar] [CrossRef]
- Adhikari, S. Joint statistics of natural frequencies of stochastic dynamic systems. Comput. Mech. 2007, 40, 739–752. [Google Scholar] [CrossRef]
- Adhikari, S.; Friswell, M.; Lonkar, K.; Sarkar, A. Experimental case studies for uncertainty quantification in structural dynamics. Probabilistic Eng. Mech. 2009, 24, 473–492. [Google Scholar] [CrossRef]
- Adhikari, S.; Phani, A. Random Eigenvalue Problems in Structural Dynamics: Experimental Investigations. AIAA J. 2010, 48, 1085–1096. [Google Scholar] [CrossRef]
- Rahman, S. Probability Distributions of Natural Frequencies of Uncertain Dynamic Systems. AIAA J. 2009, 47, 1579–1589. [Google Scholar] [CrossRef]
- Rahman, S.; Yadav, V. Orthogonal polynomial expansions for solving random eigenvalue problems. Int. J. Uncertain. Quantif. 2011, 1, 163–187. [Google Scholar] [CrossRef] [Green Version]
- Elishakoff, I.; Fang, T.; Sarlin, N.; Jiang, C. Uncertainty quantification and propagation based on hybrid experimental, theoretical, and computational treatment. Mech. Syst. Signal Process. 2021, 147, 107058. [Google Scholar] [CrossRef]
- Trainotti, F.; Haeussler, M.; Rixen, D. A practical handling of measurement uncertainties in frequency based substructuring. Mech. Syst. Signal Process. 2020, 144, 106846. [Google Scholar] [CrossRef]
- Mehta, M.L. Random Matrices; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Daubechies, I. Ten Lectures on Wavelets; SIAM: Bangkok, Thailand, 1992. [Google Scholar]
- Debnath, L.; Shah, F.A. Wavelet Transforms and Their Applications; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Dai, Q.; Cao, Q. Parametric instability analysis of truncated conical shells using the Haar wavelet method. Mech. Syst. Signal Process. 2018, 105, 200–213. [Google Scholar] [CrossRef]
- Nakhnikian, A.; Ito, S.; Dwiel, L.; Grasse, L.; Rebec, G.; Lauridsen, L.; Beggs, J. A novel cross-frequency coupling detection method using the generalized morse wavelets. J. Neurosci. Methods 2016, 269, 61–73. [Google Scholar] [CrossRef] [Green Version]
- Basu, B.; Nagarajaiah, S.; Chakraborty, A. Online identification of linear time-varying stiffness of structural systems by wavelet analysis. Struct. Health Monit. 2008, 7, 21–36. [Google Scholar] [CrossRef]
- Mahato, S.; Teja, M.V.; Chakraborty, A. Combined wavelet–Hilbert transform-based modal identification of road bridge using vehicular excitation. J. Civ. Struct. Health Monit. 2017, 7, 29–44. [Google Scholar] [CrossRef]
- Hua, J.; Cao, X.; Yi, Y.; Lin, J. Time-frequency damage index of Broadband Lamb wave for corrosion inspection. J. Sound Vib. 2020, 464, 114985. [Google Scholar] [CrossRef]
- Wu, H.T.; Flandrin, P.; Daubechies, I. One or two frequencies? The synchrosqueezing answers. Adv. Adapt. Data Anal. 2011, 3, 29–39. [Google Scholar] [CrossRef] [Green Version]
- Daubechies, I.; Lu, J.; Wu, H.T. Synchrosqueezed wavelet transforms: An empirical mode decomposition-like tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef] [Green Version]
- Sony, S.; Sadhu, A. Synchrosqueezing transform-based identification of time-varying structural systems using multi-sensor data. J. Sound Vib. 2020, 486, 115576. [Google Scholar] [CrossRef]
- Wang, Z.C.; Ren, W.X.; Liu, J.L. A synchrosqueezed wavelet transform enhanced by extended analytical mode decomposition method for dynamic signal reconstruction. J. Sound Vib. 2013, 332, 6016–6028. [Google Scholar] [CrossRef]
- Li, C.; Liang, M. Time–frequency signal analysis for gearbox fault diagnosis using a generalized synchrosqueezing transform. Mech. Syst. Signal Process. 2012, 26, 205–217. [Google Scholar] [CrossRef]
- Friswell, M.I.; Mottershead, J.E.; Ahmadian, H. Finite–element model updating using experimental test data: Parametrization and regularization. Philos. Trans. R. Soc. London. Ser. A Math. Phys. Eng. Sci. 2001, 359, 169–186. [Google Scholar] [CrossRef]
- Friswell, M.; Mottershead, J.E. Finite Element Model Updating in Structural Dynamics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 38. [Google Scholar]
- Mahato, S.; Teja, M.V.; Chakraborty, A. Adaptive HHT (AHHT) based modal parameter estimation from limited measurements of an RC-framed building under multi-component earthquake excitations. Struct. Control Health Monit. 2015, 22, 984–1001. [Google Scholar] [CrossRef]
- Mahato, S.; Hazra, B.; Chakraborty, A. Multi-variate Empirical Mode Decomposition (MEMD) for ambient modal identification of RC road bridge. Struct. Monit. Maint. 2020, 7, 283–294. [Google Scholar]
- Likas, A.; Vlassis, N.; Verbeek, J.J. The global k-means clustering algorithm. Pattern Recognit. 2003, 36, 451–461. [Google Scholar] [CrossRef] [Green Version]
- Murphy, K.P. Machine Learning: A Probabilistic Perspective; MIT Press: Cambridge, MA, USA, 2012. [Google Scholar]
- Weaver, K.F.; Morales, V.C.; Dunn, S.L.; Godde, K.; Weaver, P.F. An Introduction to Statistical Analysis in Research: With Applications in the Biological and Life Sciences; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Mahato, S. Time-Frequency Based Signal Processing for Modal Parametric Identification. Ph.D. Thesis, Indian Institute of Technology Guwahati, Guwahati, India, 2019. [Google Scholar]
- Adhikari, S. Experimental Uncertainty Quantification in Structural Dynamics. 2009. Available online: https://engweb.swan.ac.uk/adhikaris/uq/ (accessed on 19 June 2019).







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mahato, S.; Chakraborty, A.; Griškevičius, P. A Data-Driven System Identification Method for Random Eigenvalue Problem Using Synchrosqueezed Energy and Phase Portrait Analysis. Sensors 2023, 23, 3421. https://doi.org/10.3390/s23073421
Mahato S, Chakraborty A, Griškevičius P. A Data-Driven System Identification Method for Random Eigenvalue Problem Using Synchrosqueezed Energy and Phase Portrait Analysis. Sensors. 2023; 23(7):3421. https://doi.org/10.3390/s23073421
Chicago/Turabian StyleMahato, Swarup, Arunasis Chakraborty, and Paulius Griškevičius. 2023. "A Data-Driven System Identification Method for Random Eigenvalue Problem Using Synchrosqueezed Energy and Phase Portrait Analysis" Sensors 23, no. 7: 3421. https://doi.org/10.3390/s23073421
APA StyleMahato, S., Chakraborty, A., & Griškevičius, P. (2023). A Data-Driven System Identification Method for Random Eigenvalue Problem Using Synchrosqueezed Energy and Phase Portrait Analysis. Sensors, 23(7), 3421. https://doi.org/10.3390/s23073421