
System for Estimation of Human Anthropometric Parameters Based on Data from Kinect v2 Depth Camera

 ,
,  ,
,  ,
,  ,
,  and
and 
Abstract
:1. Introduction
- To develop a system for the estimation of human anthropometric parameters based on the data from a depth camera;
- To develop a method for estimating anthropometric parameters from 3D scans;
- Using and verifying the possibility to estimate anthropometric parameters by the Kinect v2 sensor.
2. Materials and Methods
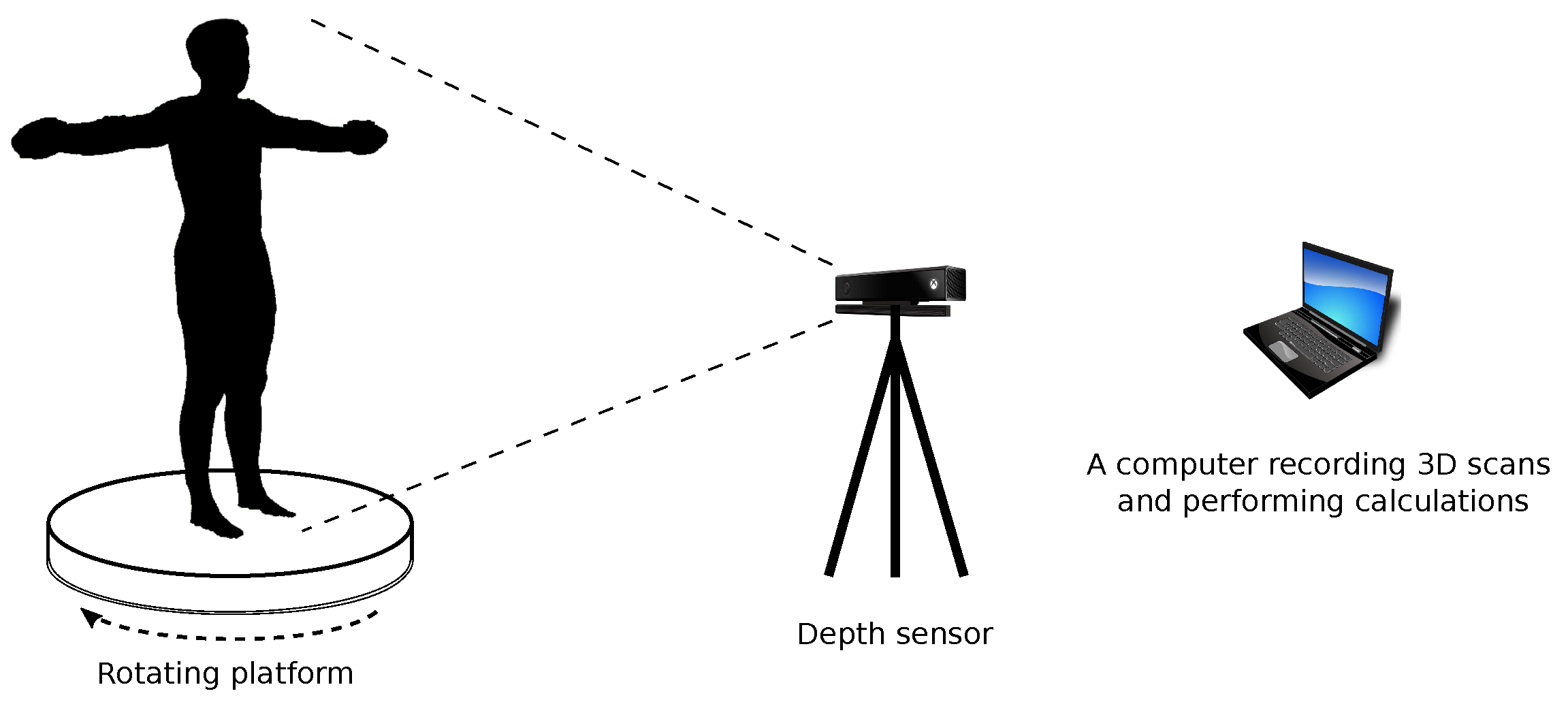
2.1. Data Collection
- Body height (BH)—the body height was measured with a stadiometer (SECA 213 Hamburg, Germany) with an accuracy of up to 1 mm.
- Arm span (AS)—the subject stood with his back to the wall so that his back, buttocks, and heels touched the wall. The subject then raised both hands horizontally and the fingers of both hands were straightened. Then the left hand with straight fingers touched the corner of the room. The arm span was measured with tape from the corner of the room to a mark on the wall that corresponded to the end of the right hand.
- Waist girth (WC)—measurements of the waist circumference were carried out with anthropometric tape, an approximate midpoint between the lower margin of the last palpable rib and the top of the iliac crest.
- Hip girth (HC)—the hip circumference measured around the widest portion of the buttocks.
- Arm girth (AC)—the subject was in a relaxed standing position with the arms hanging by the sides. The girth of the arm is measured by the anthropometric tape positioned perpendicular to the long axis of the arm at the level of the midpoint between the corner of the acromion and the proximal radial head. The tape should be positioned perpendicular to the long axis of the arm.
- Thigh girth (TC)—the subject stands with his legs slightly apart and his body weight evenly distributed on both feet. The measurement was carried out using anthropometric tape in mid-thigh in a perpendicular plane to the long axis of the thigh so that the flexible tape does not indent the skin excessively.
- Calf girth (CC)—the subject stood with feet slightly apart and body weight evenly distributed. Measurement was made in place of the maximum circumference of the calf in the plane perpendicular to the vertical axis of the leg. The measuring tape has been wrapped so that it does not indent the skin excessively.
2.2. System for Estimation of Human Somatic Parameters
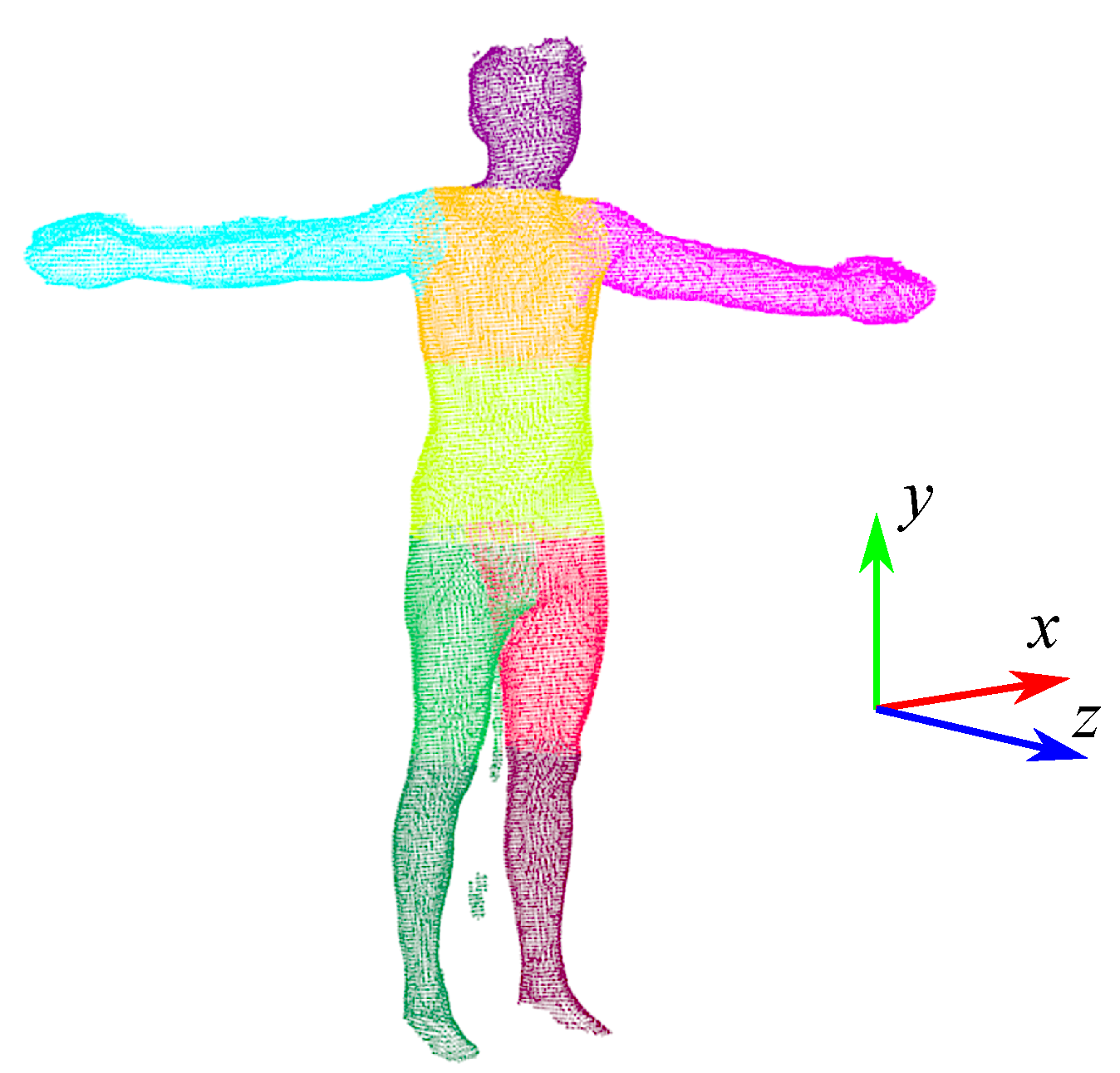
2.3. Segmentation of a 3D Scan of the Human Body
2.4. Estimation of Human Somatic Parameters
- In order to calculate given perimeters, fragments of point clouds are separated from individual segments. These points are determined as follows:
- (a)
- Arm girth (AC)—the place (point ) where the circumference is calculated is halfway between the beginning of the arm (defined by points and —right arm, and —left arm) and elbow (approximate position of the elbow is calculated on the basis of the proportion of the length of the arm to the forearm; this proportion was determined on the basis of the measurements of the test group). Then the points of the arm whose coordinate x is in the range are projected onto the plane.
- (b)
- Waist girth (WC)—the place (point ) where the waist circumference is calculated is estimated based on the measurements of the test group, during which measured the distances between the beginning of the torso (place of hip circumference measurement) and the waist and between waist and the end of the body (beginning of the neck). Torso points whose coordinate y is in the range are projected onto the plane .
- (c)
- Hip girth (HC)—the value of the y coordinate corresponding to the location of the hip circumference measurement () is determined during segmentation. Points for which the y coordinate is in the range are projected onto the plane.
- (d)
- Thigh girth (TC) is calculated for points located in the middle of the thigh segment. The coordinate is derived from the points at the beginning and end of the thigh. Points for which the coordinate is in the range are projected onto the plane.
- (e)
- Calf girth (CC)—at the beginning, the approximate place of circumference measurement is determined, for this purpose, based on the measurements of the test group, during which the distances between the knee and the calf girth measurement place and the calf girth measurement place and the foot, the coordinate was determined. Among the filtered points, the point () with the smallest value of the z coordinate is searched. The y coordinate of the point corresponds to the height for which the calf has the greatest circumference. Points for which the y coordinate is in the range are projected onto the plane.
- Using the Convex Hull method, an ordered list of points is determined from the points projected onto the plane;
- The perimeter is calculated from the equation:where and is the Euclidean distance between the points and .
2.5. Statistical Analysis
3. Results and Discussion
4. Conclusions
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Fosbøl, M.O.; Zerahn, B. Contemporary methods of body composition measurement. Clin. Physiol. Funct. Imaging 2015, 35, 81–97. [Google Scholar] [CrossRef] [PubMed]
- Jaeschke, L.; Steinbrecher, A.; Pischon, T. Measurement of waist and hip circumference with a body surface scanner: Feasibility, validity, reliability, and correlations with markers of the metabolic syndrome. PLoS ONE 2015, 10, e0119430. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jones, P.; Baker, A.; Hardy, C.; Mowat, A. Measurement of body surface area in children with liver disease by a novel three-dimensional body scanning device. Eur. J. Appl. Physiol. Occup. Physiol. 1994, 68, 514–518. [Google Scholar] [CrossRef] [PubMed]
- Giachetti, A.; Lovato, C.; Piscitelli, F.; Milanese, C.; Zancanaro, C. Robust automatic measurement of 3D scanned models for the human body fat estimation. IEEE J. Biomed. Health Inform. 2015, 19, 660–666. [Google Scholar] [CrossRef]
- Fayet-Moore, F.; Petocz, P.; McConnell, A.; Tuck, K.; Mansour, M. The cross-sectional association between consumption of the recommended five food group “grain (cereal)”, dietary fibre and anthropometric measures among australian adults. Nutrients 2017, 9, 157. [Google Scholar] [CrossRef] [Green Version]
- Choppin, S.; Wheat, J. The potential of the Microsoft Kinect in sports analysis and biomechanics. Sport. Technol. 2013, 6, 78–85. [Google Scholar] [CrossRef]
- Vigotsky, A.D.; Bryanton, M.A.; Nuckols, G.; Beardsley, C.; Contreras, B.; Evans, J.; Schoenfeld, B.J. Biomechanical, anthropometric, and psychological determinants of barbell back squat strength. J. Strength Cond. Res. 2019, 33, S26–S35. [Google Scholar] [CrossRef]
- Kahelin, C.A.; George, N.C.; Gyemi, D.L.; Andrews, D.M. Head, Neck, Trunk, and Pelvis Tissue Mass Predictions for Older Adults using Anthropometric Measures and Dual-Energy X-ray Absorptiometry. Int. J. Kinesiol. Sport. Sci. 2020, 8, 14–23. [Google Scholar] [CrossRef]
- Xu, H.; Yu, Y.; Zhou, Y.; Li, Y.; Du, S. Measuring accurate body parameters of dressed humans with large-scale motion using a Kinect sensor. Sensors 2013, 13, 11362–11384. [Google Scholar] [CrossRef] [Green Version]
- Kuehnapfel, A.; Ahnert, P.; Loeffler, M.; Broda, A.; Scholz, M. Reliability of 3D laser-based anthropometry and comparison with classical anthropometry. Sci. Rep. 2016, 6, 26672. [Google Scholar] [CrossRef] [Green Version]
- Stancic, I.; Supuk, T.; Cecic, M. Computer vision system for human anthropometric parameters estimation. WSEAS Trans. Syst. 2009, 8, 430–439. [Google Scholar]
- Lin, J.D.; Chiou, W.K.; Weng, H.F.; Fang, J.T.; Liu, T.H. Application of three-dimensional body scanner: Observation of prevalence of metabolic syndrome. Clin. Nutr. 2004, 23, 1313–1323. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Wu, Y.; Wu, H. Machine Learning Enabled 3D Body Measurement Estimation Using Hybrid Feature Selection and Bayesian Search. Appl. Sci. 2022, 12, 7253. [Google Scholar] [CrossRef]
- Škorvánková, D.; Riečickỳ, A.; Madaras, M. Automatic estimation of anthropometric human body measurements. arXiv 2021, arXiv:2112.11992. [Google Scholar]
- BenAbdelkader, C.; Yacoob, Y. Statistical estimation of human anthropometry from a single uncalibrated image. In Computational Forensics; Franke, K., Petrovic, S., Abraham, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 1–17. [Google Scholar]
- Peyer, K.E.; Morris, M.; Sellers, W.I. Subject-specific body segment parameter estimation using 3D photogrammetry with multiple cameras. PeerJ 2015, 3, e831. [Google Scholar] [CrossRef] [Green Version]
- Espitia-Contreras, A.; Sanchez-Caiman, P.; Uribe-Quevedo, A. Development of a Kinect-based anthropometric measurement application. In Proceedings of the 2014 IEEE Virtual Reality, Minneapolis, MN, USA, 29 March–2 April 2014; pp. 71–72. [Google Scholar] [CrossRef]
- Clarkson, S.; Choppin, S.; Hart, J.; Heller, B.; Wheat, J. Calculating body segment inertia parameters from a single rapid scan using the Microsoft Kinect. In Proceedings of the 3rd International Conference on 3D Body Scanning Technologies, Lugano, Switzerland, 16–17 October 2012; pp. 153–163. [Google Scholar]
- Soileau, L.; Bautista, D.; Johnson, C.; Gao, C.; Zhang, K.; Li, X.; Heymsfield, S.B.; Thomas, D.; Zheng, J. Automated anthropometric phenotyping with novel Kinect-based three-dimensional imaging method: Comparison with a reference laser imaging system. Eur. J. Clin. Nutr. 2016, 70, 475–481. [Google Scholar] [CrossRef]
- He, Q.; Ji, Y.; Zeng, D.; Zhang, Z. Volumeter: 3D human body parameters measurement with a single Kinect. IET Comput. Vis. 2018, 12, 553–561. [Google Scholar] [CrossRef]
- Couvertier, M.; Monnet, T.; Lacouture, P. Identification of Human Body Segment Inertial Parameters. In Proceedings of the 22nd Congress of the European Society of Biomechanics, Lyon, France, 10–13 July 2016. [Google Scholar]
- Clarkson, S.; Wheat, J.; Heller, B.; Choppin, S. Assessing the suitability of the Microsoft Kinect for calculating person specific body segment parameters. In Proceedings of the European Conference on Computer Vision, Zurich, Switzerland, 6–12 September 2014; Springer: Berlin/Heidelberg, Germany, 2014; pp. 372–385. [Google Scholar]
- Cui, Y.; Chang, W.; Nöll, T.; Stricker, D. KinectAvatar: Fully automatic body capture using a single kinect. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); 7729 LNCS; Springer: Berlin/Heidelberg, Germany, 2013; pp. 133–147. [Google Scholar] [CrossRef] [Green Version]
- Cui, Y.; Stricker, D. 3D body scanning with one Kinect. In Proceedings of the 2nd International Conference on 3D Body Scanning Technologies, Lugano, Switzerland, 25–26 October 2011; Volume 10. [Google Scholar]
- Cai, Z.; Han, J.; Liu, L.; Shao, L. RGB-D datasets using microsoft kinect or similar sensors: A survey. Multimed. Tools Appl. 2017, 76, 4313–4355. [Google Scholar] [CrossRef] [Green Version]
- Weiss, A.; Hirshberg, D.; Black, M.J. Home 3D body scans from noisy image and range data. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011; pp. 1951–1958. [Google Scholar] [CrossRef]
- Lawin, F.J. Depth Data Processing and 3D Reconstruction Using the Kinect v2. Master’s Thesis, Linköping University, Linköping, Sweden, 2015. [Google Scholar]
- Rogati, G.; Leardini, A.; Ortolani, M.; Caravaggi, P. Validation of a novel Kinect-based device for 3D scanning of the foot plantar surface in weight-bearing. J. Foot Ankle Res. 2019, 12, 46. [Google Scholar] [CrossRef] [Green Version]
- Zhao, K.; Luximon, A.; Chan, C. Low cost 3D foot scan with Kinect. Int. J. Digit. Hum. 2018, 2, 97–114. [Google Scholar] [CrossRef]
- Zain, N.; Rahman, W. Three-dimensional (3D) scanning using Microsoft® Kinect® Xbox 360® scanner for fabrication of 3D printed radiotherapy head phantom. J. Phys. Conf. Ser. 2020, 1497, 012005. [Google Scholar] [CrossRef]
- Kepski, M.; Kwolek, B. Event-driven system for fall detection using body-worn accelerometer and depth sensor. IET Comput. Vis. 2018, 12, 48–58. [Google Scholar] [CrossRef] [Green Version]
- Lin, Y.H.; Huang, S.Y.; Hsiao, K.F.; Kuo, K.P.; Wan, L.T. A kinect-based system for golf beginners’ training. In Information Technology Convergence; Springer: Dordrecht, The Netherlands, 2013; pp. 121–129. [Google Scholar]
- Ting, H.Y.; Sim, K.S.; Abas, F.S. Kinect-based badminton movement recognition and analysis system. Int. J. Comput. Sci. Sport 2015, 14, 25–41. [Google Scholar]
- Flôr, C.A.G.; Silvatti, A.P.; Menzl, H.J.K.; Dalla Bernardina, G.R.; de Souza Vicente, C.M.; de Andrade, A.G.P. Validity and Reliability of the Microsoft Kinect to Obtain the Execution Time of the Taekwondo’s Frontal Kick. In Proceedings of the 33 International Conference of Biomechanics in Sports, Poitiers, France, 29 June–3 July 2015. [Google Scholar]
- Ting, H.Y.; Tan, Y.W.D.; Lau, B.Y.S. Potential and limitations of Kinect for badminton performance analysis and profiling. Indian J. Sci. Technol. 2016, 9, 1–5. [Google Scholar] [CrossRef]
- Tamura, Y.; Yamaoka, K.; Uehara, M.; Shima, T. Capture and Feedback in Flying Disc Throw with use of Kinect. Int. J. Comput. Inf. Eng. 2013, 7, 190–194. [Google Scholar]
- Bianco, S.; Tisato, F. Karate moves recognition from skeletal motion. In Proceedings of the Three-Dimensional Image Processing (3DIP) and Applications 2013, Burlingame, CA, USA, 6–8 February 2013; International Society for Optics and Photonics: Bellingham, WA, USA, 2013; Volume 8650, p. 86500K. [Google Scholar]
- Marquardt, Z.; Beira, J.; Em, N.; Paiva, I.; Kox, S. Super Mirror: A kinect interface for ballet dancers. In Proceedings of the CHI’12 Extended Abstracts on Human Factors in Computing Systems, Austin, TX, USA, 5–10 May 2012; Association for Computing Machinery: New York, NY, USA, 2012; pp. 1619–1624. [Google Scholar]
- Li, X.; Liu, J.; Huang, Y.; Wang, D.; Miao, Y. Human Motion Pattern Recognition and Feature Extraction: An Approach Using Multi-Information Fusion. Micromachines 2022, 13, 1205. [Google Scholar] [CrossRef]
- Mokdad, M.; Mokdad, I.; Bouhafs, M.; Lahcene, B. Estimating anthropometric measurements of Algerian students with Microsoft kinect. In Advances in Intelligent Systems and Computing; Springer: Cham, Switzerland, 2019; Volume 826, pp. 496–506. [Google Scholar] [CrossRef]
- Naufal, A.; Anam, C.; Widodo, C.E.; Dougherty, G. Automated Calculation of Height and Area of Human Body for Estimating Body Weight Using a Matlab-based Kinect Camera. Smart Sci. 2022, 10, 68–75. [Google Scholar] [CrossRef]
- Tong, J.; Zhou, J.; Liu, L.; Pan, Z.; Yan, H. Scanning 3D full human bodies using kinects. IEEE Trans. Vis. Comput. Graph. 2012, 18, 643–650. [Google Scholar] [CrossRef] [Green Version]
- Bragança, S.; Arezes, P.; Carvalho, M.; Ashdown, S.P.; Castellucci, I.; Leão, C. A comparison of manual anthropometric measurements with Kinect-based scanned measurements in terms of precision and reliability. Work 2018, 59, 325–339. [Google Scholar] [CrossRef] [Green Version]
- Kudzia, P.; Jackson, E.; Dumas, G. Estimating body segment parameters from three-dimensional human body scans. PLoS ONE 2022, 17, e0262296. [Google Scholar] [CrossRef]
- Marfell-Jones, M.J.; Stewart, A.; De Ridder, J. International Standards for Anthropometric Assessment; International Society for the Advancement of Kinanthropometry: Wellington, New Zealand, 2012. [Google Scholar]
- Rusu, R.B.; Cousins, S. 3D is here: Point Cloud Library (PCL). In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011. [Google Scholar] [CrossRef] [Green Version]
- R Core Team. R: A Language and Environment for Statistical Computing; R Version 4.0.3; R Foundation for Statistical Computing: Vienna, Austria, 2020. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | GS—Gold Standard | DC—Depth Camera Estimation | d | p | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Me | Q1 | Q3 | Me | Q1 | Q3 | ||||||||
| arm span (m) | 1.84 | 0.07 | 1.84 | 1.80 | 1.89 | 1.83 | 0.08 | 1.83 | 1.78 | 1.89 | −0.012 | −0.7% | 0.001 * |
| body height (m) | 1.80 | 0.07 | 1.80 | 1.76 | 1.85 | 1.80 | 0.07 | 1.80 | 1.76 | 1.84 | −0.002 | −0.1% | 0.224 |
| arm girth (m) | 0.35 | 0.03 | 0.34 | 0.33 | 0.36 | 0.33 | 0.03 | 0.33 | 0.31 | 0.35 | −0.017 | −5.9% | 0.001 * |
| calf girth (m) | 0.39 | 0.03 | 0.39 | 0.38 | 0.41 | 0.38 | 0.03 | 0.38 | 0.36 | 0.40 | −0.013 | −3.4% | 0.001 * |
| hip girth (m) | 1.06 | 0.06 | 1.05 | 1.02 | 1.09 | 0.99 | 0.06 | 0.98 | 0.95 | 1.02 | −0.063 | −6.4% | 0.001 * |
| thigh girth (m) | 0.59 | 0.04 | 0.59 | 0.56 | 0.61 | 0.55 | 0.04 | 0.55 | 0.53 | 0.58 | −0.036 | −6.6% | 0.001 * |
| waist girth (m) | 0.89 | 0.08 | 0.88 | 0.84 | 0.92 | 0.81 | 0.07 | 0.80 | 0.77 | 0.84 | −0.074 | −9.2% | 0.001 * |
| Parameter | r | CR | CV | ||
|---|---|---|---|---|---|
| arm span (m) | 1.84 | 0.94 | 0.03 | 0.06 | 1.6% |
| body height (m) | 1.8 | 0.97 | 0.02 | 0.04 | 1.1% |
| arm girth (m) | 0.34 | 0.61 | 0.03 | 0.06 | 8.8% |
| calf girth (m) | 0.39 | 0.84 | 0.02 | 0.04 | 5.1% |
| hip girth (m) | 1.03 | 0.93 | 0.02 | 0.04 | 1.9% |
| thigh girth (m) | 0.57 | 0.87 | 0.02 | 0.04 | 3.5% |
| waist girth (m) | 0.85 | 0.94 | 0.03 | 0.06 | 3.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krzeszowski, T.; Dziadek, B.; França, C.; Martins, F.; Gouveia, É.R.; Przednowek, K. System for Estimation of Human Anthropometric Parameters Based on Data from Kinect v2 Depth Camera. Sensors 2023, 23, 3459. https://doi.org/10.3390/s23073459
Krzeszowski T, Dziadek B, França C, Martins F, Gouveia ÉR, Przednowek K. System for Estimation of Human Anthropometric Parameters Based on Data from Kinect v2 Depth Camera. Sensors. 2023; 23(7):3459. https://doi.org/10.3390/s23073459
Chicago/Turabian StyleKrzeszowski, Tomasz, Bartosz Dziadek, Cíntia França, Francisco Martins, Élvio Rúbio Gouveia, and Krzysztof Przednowek. 2023. "System for Estimation of Human Anthropometric Parameters Based on Data from Kinect v2 Depth Camera" Sensors 23, no. 7: 3459. https://doi.org/10.3390/s23073459
APA StyleKrzeszowski, T., Dziadek, B., França, C., Martins, F., Gouveia, É. R., & Przednowek, K. (2023). System for Estimation of Human Anthropometric Parameters Based on Data from Kinect v2 Depth Camera. Sensors, 23(7), 3459. https://doi.org/10.3390/s23073459