
Crowdsourced Indoor Positioning with Scalable WiFi Augmentation †


Abstract
:1. Introduction
- We propose a WiFi FP augmentation method for 3D crowdsourced indoor positioning systems. The proposed method can generate effective WiFi FPs in unsurveyed locations to improve positioning accuracy.
- Two self-adaptive virtual RP generation (VRPG) approaches are designed based on and beyond the conventional approach in determining the virtual RPs of the new FPs.
- A multivariate Gaussian process regression (MGPR)-based spatial WiFi signal modeling (SWSM) algorithm is designed to model the distribution of all WiFi FPs and predict the signals on virtual RPs in a 3D environment.
- Experiments on an open 3D public dataset are conducted to comprehensively evaluate the positioning accuracy, floor identification accuracy, and computation complexity of the proposed augmentation method.
2. Problem Statement and Motivations
3. Methodology
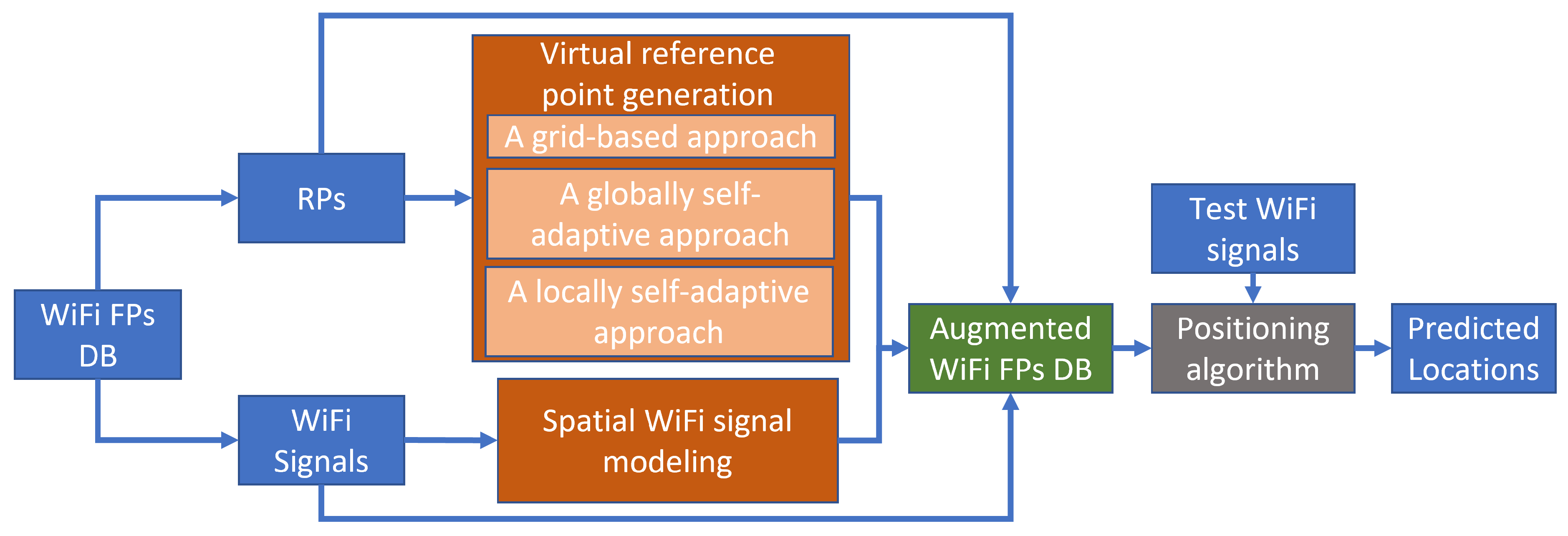
3.1. Framework
3.2. Virtual Reference Point Generation
3.2.1. A Grid-Based Approach
3.2.2. A Globally Self-Adaptive Approach
3.2.3. A Locally Self-Adaptive Approach
3.3. Spatial WiFi Signal Modeling
4. Preliminaries
4.1. Dataset
4.2. Data Pre-Processing
4.3. Positioning Algorithm
4.4. Training of the MGPR Model
5. Experiments and Evaluations
5.1. Experimental Settings
5.2. Performance Evaluations
5.2.1. 3D Positioning Accuracy
5.2.2. Floor Identification Accuracy
5.2.3. Computation Complexity in Positioning Phase
5.2.4. Comparison with State-of-the-Art
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| RFID | Radio frequency identification |
| RSS | Received signal strength |
| FP | Fingerprint |
| RP | Reference point |
| GPR | Gaussian process regression |
| MGPR | Multivariate Gaussian process regression |
| VRPG | Virtual reference point generation |
| SWSM | Spatial WiFi signal modeling |
| GB | Grid-based |
| GS | Globally self-adaptive |
| LS | Locally self-adaptive |
References
- Bae, H.J.; Choi, L. Large-Scale Indoor Positioning using Geo-magnetic Field with Deep Neural Networks. In Proceedings of the 2019 IEEE International Conference on Communications (ICC), Shanghai, China, 20–24 May 2019; pp. 1–6. [Google Scholar]
- Yeh, S.-C.; Hsu, W.-H.; Lin, W.-Y.; Wu, Y.-F. Study on an Indoor Positioning System Using Earth’s Magnetic Field. IEEE Trans. Instrum. Meas. 2020, 69, 865–872. [Google Scholar] [CrossRef]
- Dong, Y.; Arslan, T.; Yang, Y. Magnetic Disturbance Detection for Smartphone-Based Indoor Positioning Systems With Unsupervised Learning. IEEE Trans. Instrum. Meas. 2022, 71, 2506411. [Google Scholar] [CrossRef]
- Bernardini, F.; Motroni, A.; Nepa, P.; Buffi, A.; Tellini, B. SAR-Based Indoor Localization of UHF-RFID Tags via Mobile Robot. In Proceedings of the 2018 International Conference on In-door Positioning and Indoor Navigation (IPIN), Nantes, France, 24–27 September 2018; pp. 1–8. [Google Scholar]
- Vena, A.; Illanes, I.; Alidieres, L.; Sorli, B.; Perea, F. RFID based Indoor Localization System to Analyze Visitor Behavior in a Museum. In Proceedings of the 2021 IEEE International Conference on RFID Technology and Applications (RFID-TA), Delhi, India, 6–8 October 2021; pp. 183–186. [Google Scholar]
- Sasikala, M.; Athena, J.; Rini, A.S. Received Signal Strength based Indoor Positioning with RFID. In Proceedings of the 2021 IEEE International Conference on RFID Technology and Applications (RFID-TA), Delhi, India, 6–8 October 2021; pp. 260–263. [Google Scholar]
- Dong, Y.; Arslan, T.; Yang, Y. An Encoded LSTM Network Model for WiFi-based Indoor Positioning. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–7 September 2022; pp. 1–6. [Google Scholar]
- Mendoza-Silva, G.; Richter, P.; Torres-Sospedra, J.; Lohan, E.; Huerta, J. Long-term WiFi fingerprinting dataset for research on robust indoor positioning. Data 2018, 3, 3. [Google Scholar] [CrossRef]
- Dong, Y.; Arslan, T.; Yang, Y. Real-Time NLOS/LOS Identification for Smartphone-Based Indoor Positioning Systems Using WiFi RTT and RSS. IEEE Sens. J. 2022, 22, 5199–5209. [Google Scholar] [CrossRef]
- Unlersen, M.F. ABC-ANN Based Indoor Position Estimation Using Preprocessed RSSI. Electronics 2022, 11, 4054. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, Y.; Chen, L.; Chen, R. Intelligent Fusion Structure for Wi-Fi/BLE/QR/MEMS Sensor-Based Indoor Localization. Remote Sens. 2023, 15, 1202. [Google Scholar] [CrossRef]
- Karimi, H.A. Advanced Location-Based Technologies and Services; CRC Press: Boca Raton, CA, USA, 2013. [Google Scholar]
- Jian, H.X.; Hao, W. WIFI Indoor Location Optimization Method Based on Position Fingerprint Algorithm. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; pp. 585–588. [Google Scholar] [CrossRef]
- Shang, S.; Wang, L. Overview of WiFi Fingerprinting-based Indoor Positioning. IET Commun. 2022, 16, 725–733. [Google Scholar] [CrossRef]
- Obeidat, H.; Shuaieb, W.; Obeidat, O.; Abd-Alhameed, R. A Review of Indoor Localization Techniques and Wireless Technologies. Wirel. Pers. Commun. 2021, 119, 289–327. [Google Scholar] [CrossRef]
- Seco, F.; Jimenez, A.R.; Prieto, C.; Roa, J.; Koutsou, K. A survey of mathematical methods for indoor localization. In Proceedings of the 2009 IEEE International Symposium on Intelligent Signal Processing, Hungary, Budapest, 26–28 August 2009; pp. 9–14. [Google Scholar]
- Wang, B.; Chen, Q.; Yang, L.T.; Chao, H.-C. Indoor smartphone localization via fingerprint crowdsourcing: Challenges and approaches. IEEE Wirel. Commun. 2016, 23, 82–89. [Google Scholar] [CrossRef]
- Park, J.-P.; Curtis, D.; Teller, S.; Ledlie, J. Implications of device diversity for organic localization. In Proceedings of the 2011 IEEE INFOCOM, Shanghai, China, 15 April 2011; pp. 3182–3190. [Google Scholar]
- Ledlie, J. Molé: A scalable, user-generated WiFi positioning engine. J. Locat. Based Serv. 2012, 6, 55–80. [Google Scholar] [CrossRef]
- Zhou, B.; Li, Q.; Mao, Q.; Tu, W. A robust crowdsourcing-based indoor localization system. Sensors 2017, 17, 864. [Google Scholar] [CrossRef]
- Lashkari, B.; Rezazadeh, J.; Farahbakhsh, R.; Sandrasegaran, K. Crowdsourcing and sensing for indoor localization in IoT: A review. IEEE Sens. J. 2019, 19, 2408–2434. [Google Scholar] [CrossRef]
- Radu, V.; Marina, M.K. HiMLoc: Indoor smartphone localization via activity aware Pedestrian Dead Reckoning with selective crowdsourced WiFi fingerprinting. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Montbeliard-Belfort, France, 28–31 October 2013. [Google Scholar]
- Wang, J. LiFS: Low human-effort, device-free localization with fine-grained subcarrier information. In Proceedings of the Proceedings of the 22nd Annual International Conference on Mobile Computing and Networking, New York, NY, USA, 3–7 October 2016; pp. 243–256. [Google Scholar]
- He, C.; Guo, S.; Wu, Y.; Yang, Y. A novel radio map construction method to reduce collection effort for indoor localization. Measurement 2016, 94, 423–431. [Google Scholar] [CrossRef]
- Jun, J.; He, L.; Gu, Y.; Jiang, W.; Kushwaha, G.; A, V.; Cheng, L.; Liu, C.; Zhu, T. Low-overhead WiFi fingerprinting. IEEE Trans. Mobile Comput. 2018, 17, 590–603. [Google Scholar] [CrossRef]
- Sinha, R.S.; Lee, S.M.; Rim, M.; Hwang, S.H. Data augmentation schemes for deep learning in an indoor positioning application. Electronics 2019, 8, 554. [Google Scholar] [CrossRef]
- Sinha, R.S.; Hwang, S.-H. Improved RSSI-based data augmentation technique for fingerprint indoor localisation. Electronics 2020, 9, 851. [Google Scholar] [CrossRef]
- Sun, W.; Xue, M.; Yu, H.; Tang, H.; Lin, A. Augmentation of finger-prints for indoor WiFi localization based on Gaussian process regression. IEEE Trans. Veh. Technol. 2018, 67, 10896–10905. [Google Scholar] [CrossRef]
- Lohan, E.S.; Torres-Sospedra, J.; Leppakoski, H.; Richter, P.; Peng, Z.; Huerta, J. Wi-Fi crowdsourced fingerprinting dataset for indoor positioning. Data 2017, 2, 32. [Google Scholar] [CrossRef]
- Dong, Y.; Arslan, T.; Yang, Y.; Ma, Y. A WiFi Fingerprint Augmentation Method for 3-D Crowdsourced Indoor Positioning Systems. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–7 September 2022; pp. 1–8. [Google Scholar]
- Graham, R.L. An Efficient Algorithm for Determining the Convex Hull of a Finite Planar Set. Inf. Process. Lett. 1972, 1, 132–133. [Google Scholar] [CrossRef]
- Comaniciu, D.; Peter, M. Mean Shift: A Robust Approach Toward Feature Space Analysis. IEEE Trans. Pattern Anal. Mach. Intell. 2002, 24, 603–619. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C.K.I. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2005; p. 7. [Google Scholar]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Burrough, P.A.; McDonnell, R.; McDonnell, R.A.; Lloyd, C.D. Principles of Geographical Information Systems; OUP: Oxford, UK, 2015; ISBN 978-0-19-874284-5. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Floor * | Train | Test |
|---|---|---|
| 0 | 226 | 1265 |
| 3.7 | 197 | 1108 |
| 7.4 | 139 | 770 |
| 11.1 | 118 | 699 |
| 14.8 | 17 | 109 |
| Total | 697 | 3951 |
| Samping Ratio | Raw Data (m) | GB (m) | GS (m) | LS (m) |
|---|---|---|---|---|
| 10% | 21.27 | 17.21 | 18 | 19.82 |
| 20% | 14.47 | 12.95 | 13.06 | 13.08 |
| 30% | 13.57 | 11.22 | 10.34 | 12.10 |
| 40% | 13.01 | 11.72 | 11.76 | 12.21 |
| 50% | 11.36 | 10.60 | 10.55 | 10.72 |
| 60% | 10.93 | 10.24 | 9.85 | 10.00 |
| 70% | 10.14 | 9.17 | 9.07 | 9.26 |
| 80% | 9.83 | 9.36 | 8.85 | 8.86 |
| 90% | 9.06 | 8.59 | 8.37 | 8.44 |
| 100% | 8.94 | 8.46 | 8.27 | 8.38 |
| Sampling Ratio | Raw Data (%) | GB (%) | GS (%) | LS (%) |
|---|---|---|---|---|
| 10% | 60.01 | 66.67 | 68.21 | 62.90 |
| 20% | 74.79 | 74.66 | 75.53 | 75.96 |
| 30% | 76.26 | 86.46 | 85.90 | 82.49 |
| 40% | 80.49 | 81.22 | 82.38 | 81.60 |
| 50% | 82.36 | 82.99 | 82.97 | 83.24 |
| 60% | 83.85 | 88.10 | 87.37 | 85.50 |
| 70% | 86.76 | 89.67 | 90.66 | 89.95 |
| 80% | 89.24 | 91.09 | 91.24 | 91.07 |
| 90% | 89.32 | 91.39 | 91.60 | 91.27 |
| 100% | 89.67 | 91.72 | 91.35 | 91.07 |
| Floor 0 | Floor 1 | Floor 2 | Floor 3 | Floor 4 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GB | GS | LS | GB | GS | LS | GB | GS | LS | GB | GS | LS | GB | GS | LS | |
| 10% | 5850 | 2935 | 272 | 6133 | 3213 | 174 | 5232 | 1881 | 13 | 2533 | 1311 | 50 | 2 | 1 | 1 |
| 20% | 11,016 | 4915 | 427 | 7295 | 3244 | 300 | 7670 | 3672 | 102 | 4779 | 2852 | 167 | 3303 | 1119 | 3 |
| 30% | 11,411 | 6038 | 662 | 8438 | 4361 | 595 | 7571 | 4338 | 369 | 3427 | 2436 | 204 | 3349 | 207 | 7 |
| 40% | 9196 | 5520 | 1101 | 8463 | 4925 | 656 | 10,406 | 4940 | 372 | 6116 | 3685 | 261 | 666 | 227 | 17 |
| 50% | 13,327 | 6757 | 1398 | 8748 | 5083 | 851 | 7057 | 4269 | 439 | 5865 | 3233 | 338 | 511 | 209 | 9 |
| 60% | 12,363 | 6628 | 1473 | 8962 | 5266 | 1224 | 10,703 | 4363 | 587 | 6270 | 3937 | 489 | 3658 | 1132 | 39 |
| 70% | 12,197 | 7209 | 1665 | 8982 | 5866 | 1265 | 8097 | 5094 | 747 | 5799 | 3277 | 701 | 612 | 103 | 22 |
| 80% | 11,044 | 7292 | 1757 | 9135 | 5339 | 1329 | 10,736 | 4521 | 794 | 6561 | 4112 | 630 | 693 | 178 | 40 |
| 90% | 13,757 | 7795 | 1839 | 9154 | 5439 | 1399 | 8132 | 4430 | 955 | 6576 | 4231 | 723 | 3742 | 1155 | 43 |
| 100% | 13,787 | 7903 | 2100 | 9173 | 5466 | 1501 | 10,764 | 4458 | 847 | 6586 | 4019 | 760 | 3743 | 1156 | 45 |
| IDW | MGPR | |
|---|---|---|
| Number of invalid RSS predictions | 1371 | 494 |
| Mean error (dBm) | 16.83 | 16.67 |
| Median error (dBm) | 16.08 | 16.08 |
| Standard deviation (dBm) | 11.51 | 10.39 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dong, Y.; He, G.; Arslan, T.; Yang, Y.; Ma, Y. Crowdsourced Indoor Positioning with Scalable WiFi Augmentation. Sensors 2023, 23, 4095. https://doi.org/10.3390/s23084095
Dong Y, He G, Arslan T, Yang Y, Ma Y. Crowdsourced Indoor Positioning with Scalable WiFi Augmentation. Sensors. 2023; 23(8):4095. https://doi.org/10.3390/s23084095
Chicago/Turabian StyleDong, Yinhuan, Guoxiong He, Tughrul Arslan, Yunjie Yang, and Yingda Ma. 2023. "Crowdsourced Indoor Positioning with Scalable WiFi Augmentation" Sensors 23, no. 8: 4095. https://doi.org/10.3390/s23084095
APA StyleDong, Y., He, G., Arslan, T., Yang, Y., & Ma, Y. (2023). Crowdsourced Indoor Positioning with Scalable WiFi Augmentation. Sensors, 23(8), 4095. https://doi.org/10.3390/s23084095