
Non-Destructive Testing of Carbon Fiber-Reinforced Plastics (CFRPs) Using a Resonant Eddy Current Sensor


Abstract
1. Introduction
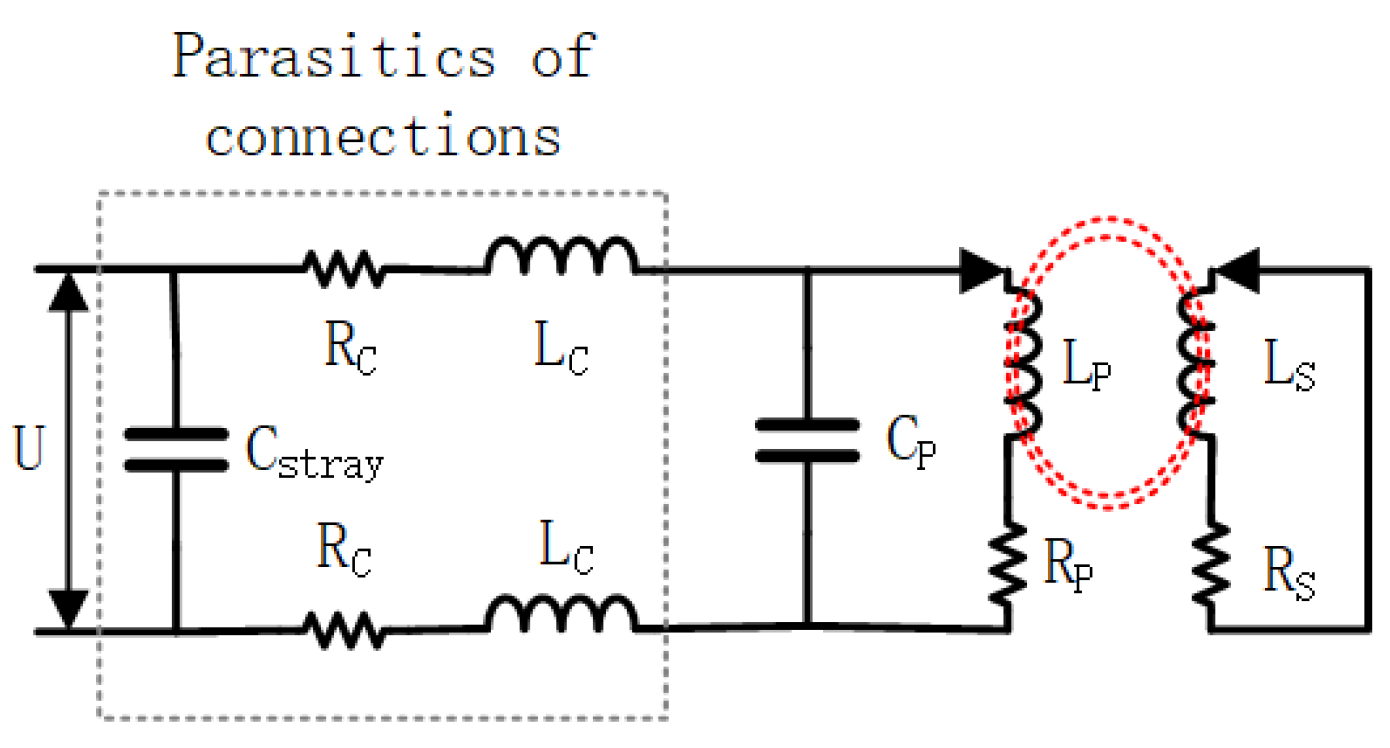
2. Principles of Operation
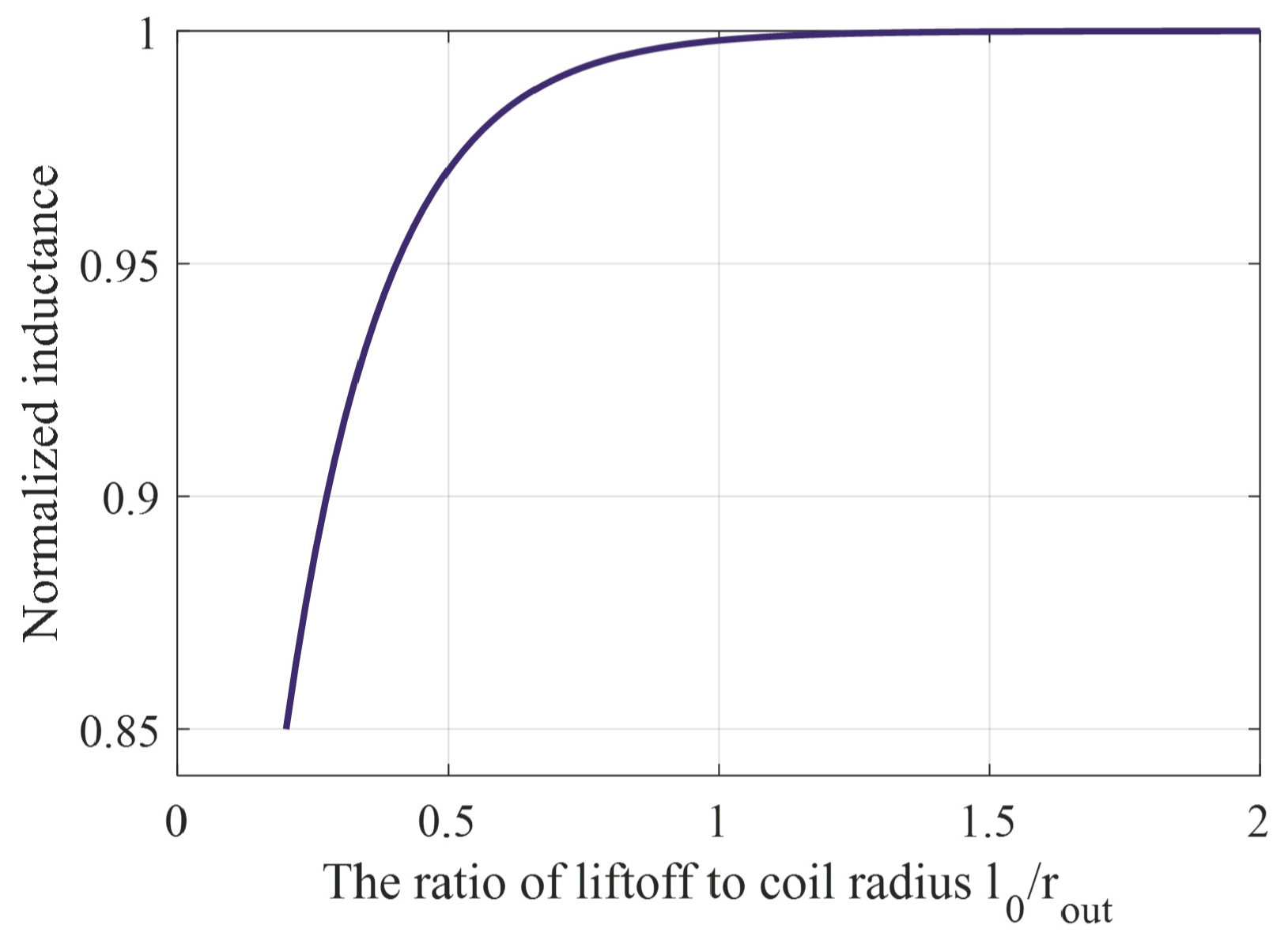
2.1. Lift-Off
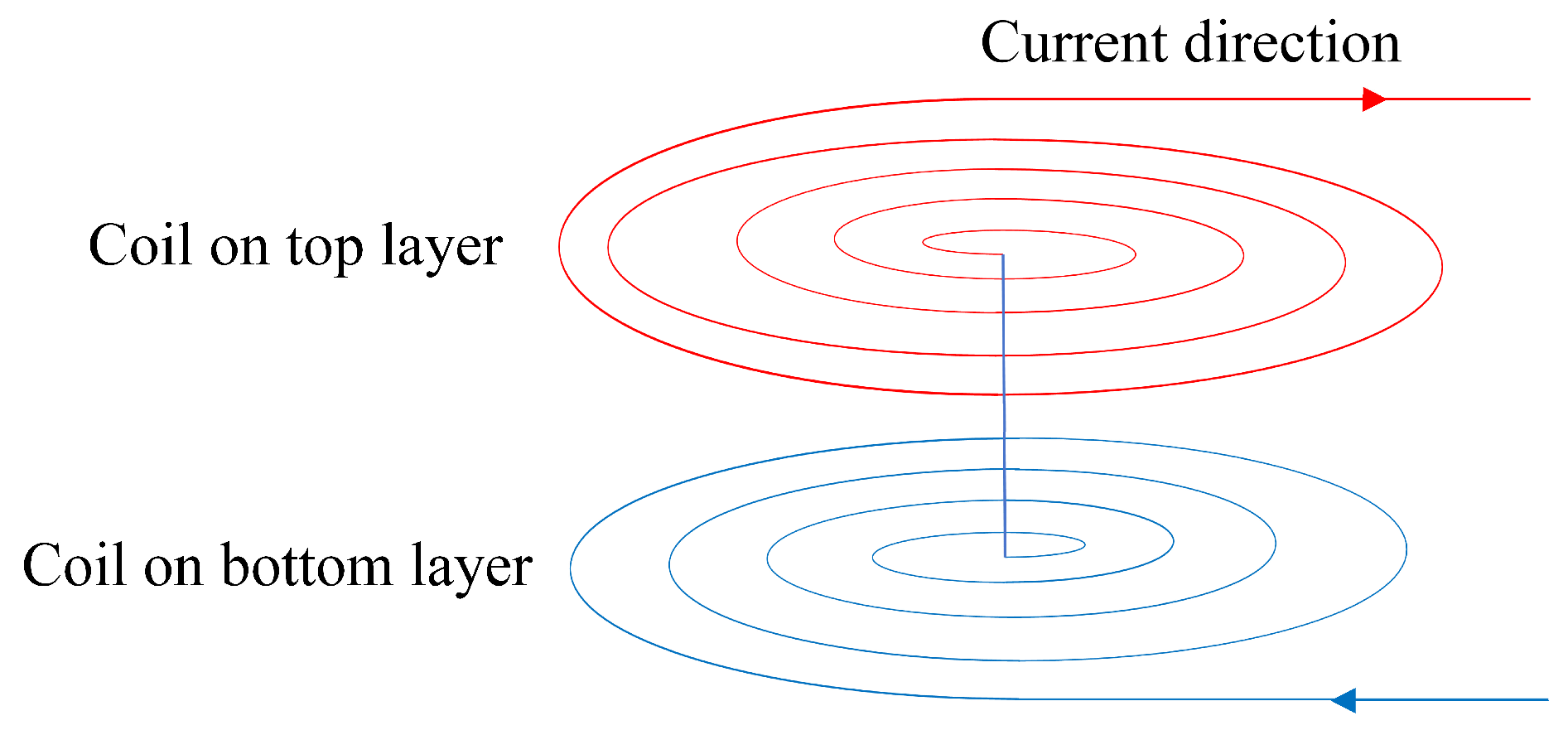
2.2. Coil Parameters

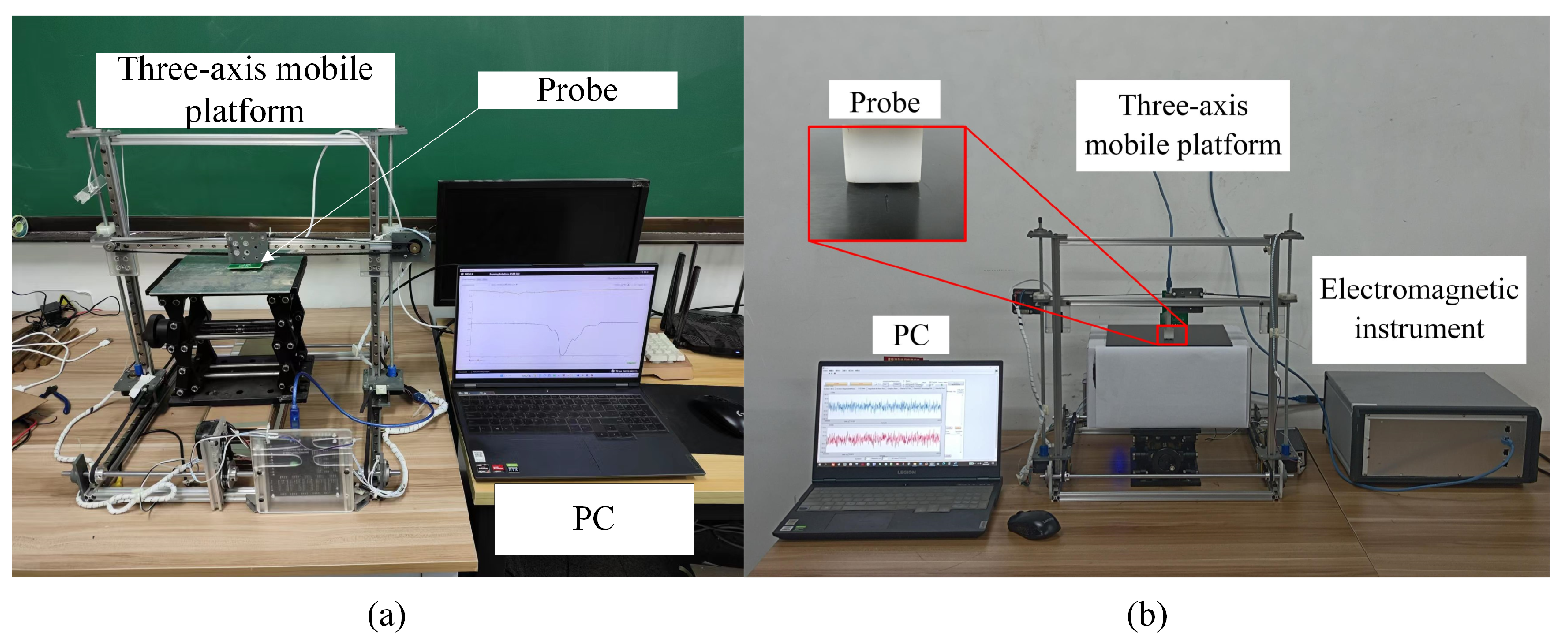
3. Experimental Methodology
4. Results and Analyses
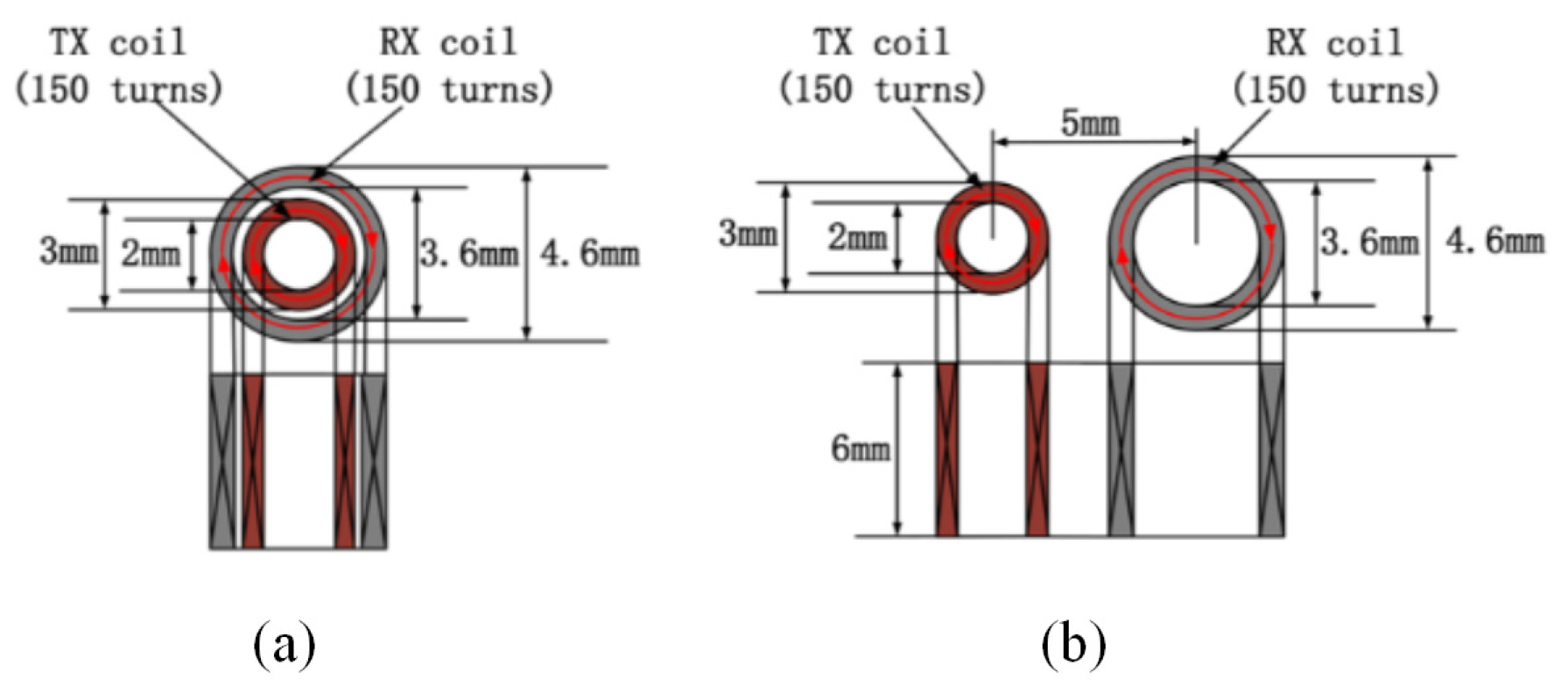
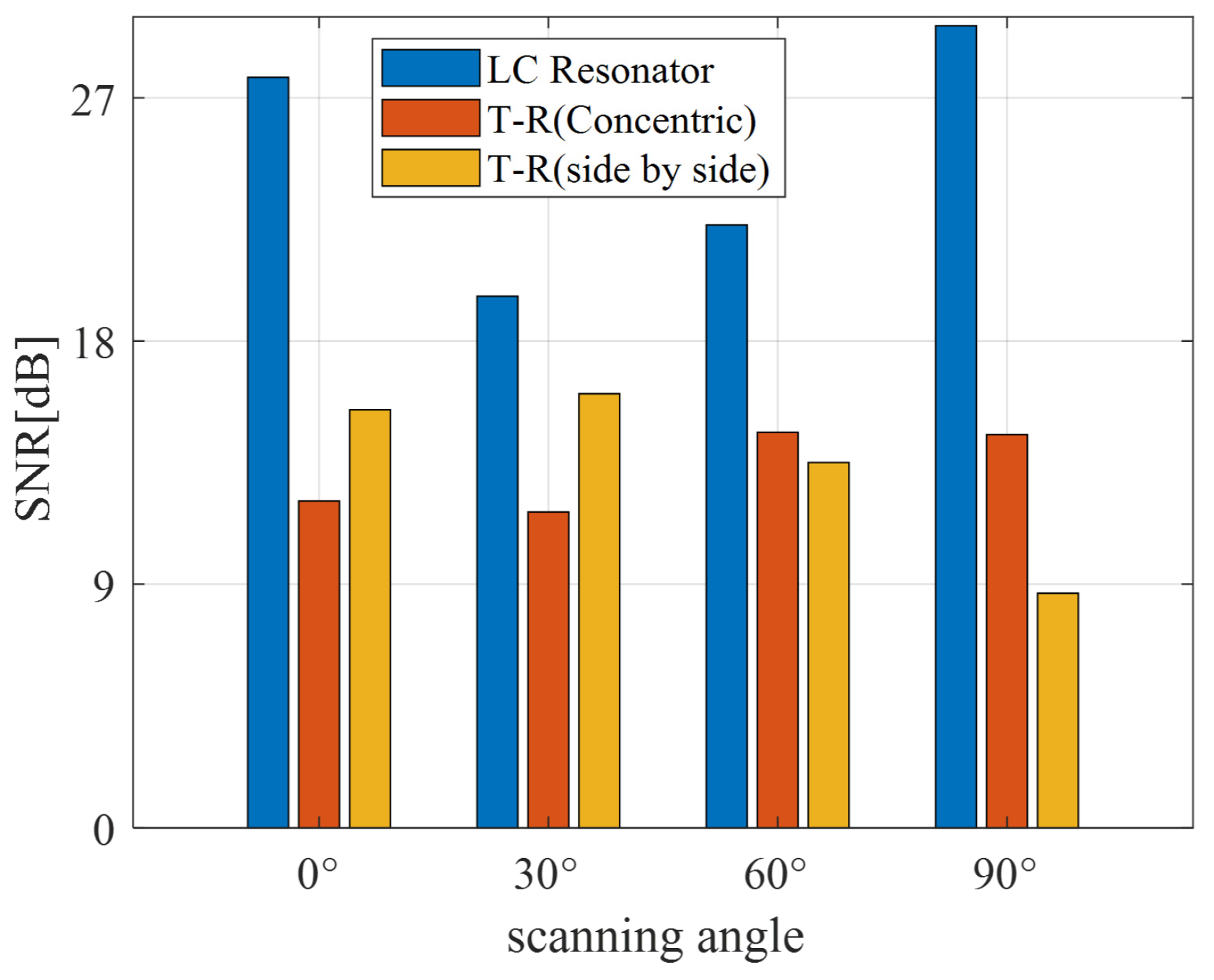
4.1. Comparison of Probe Signals

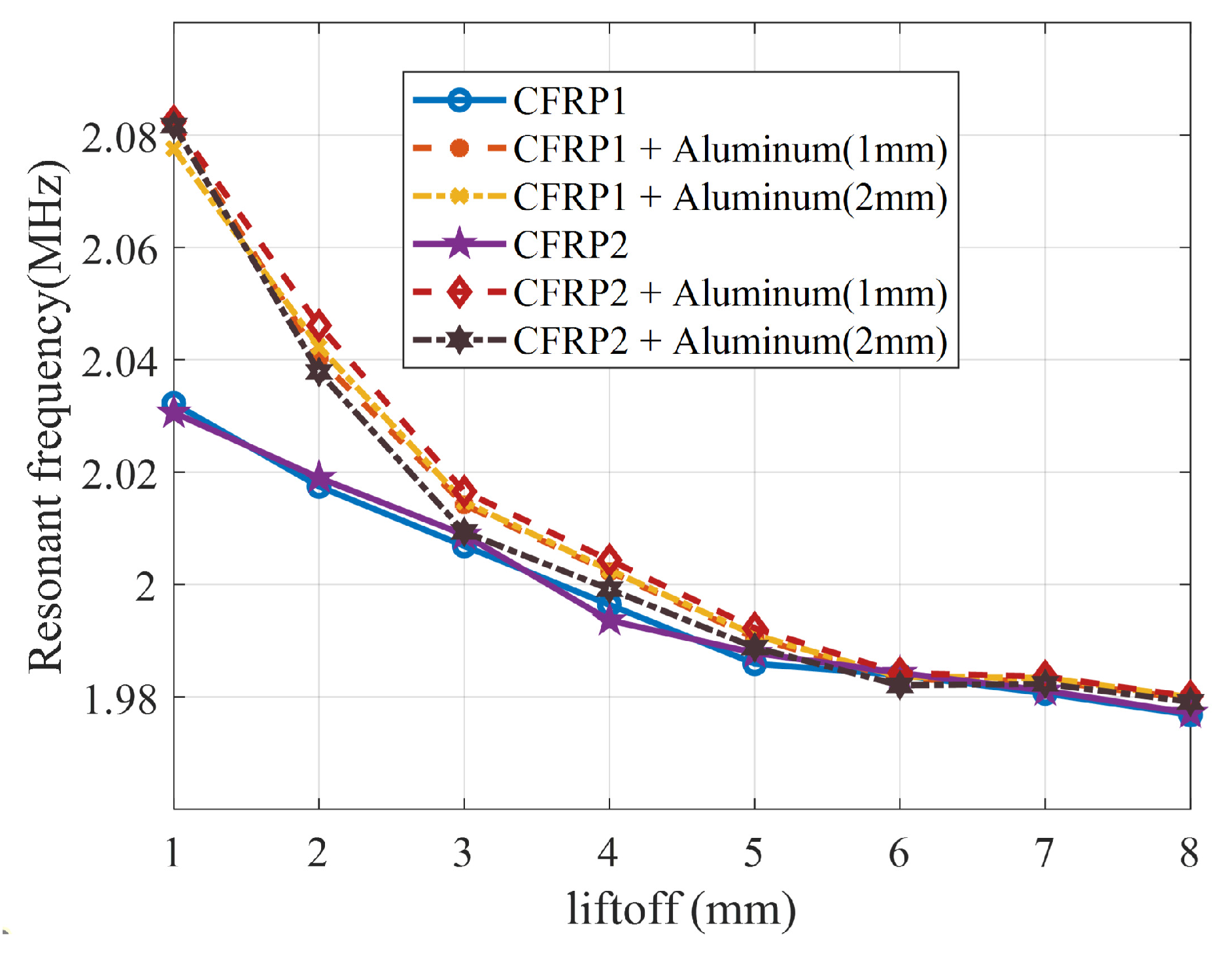
4.2. LC Resonator Performance for CFRP Testing
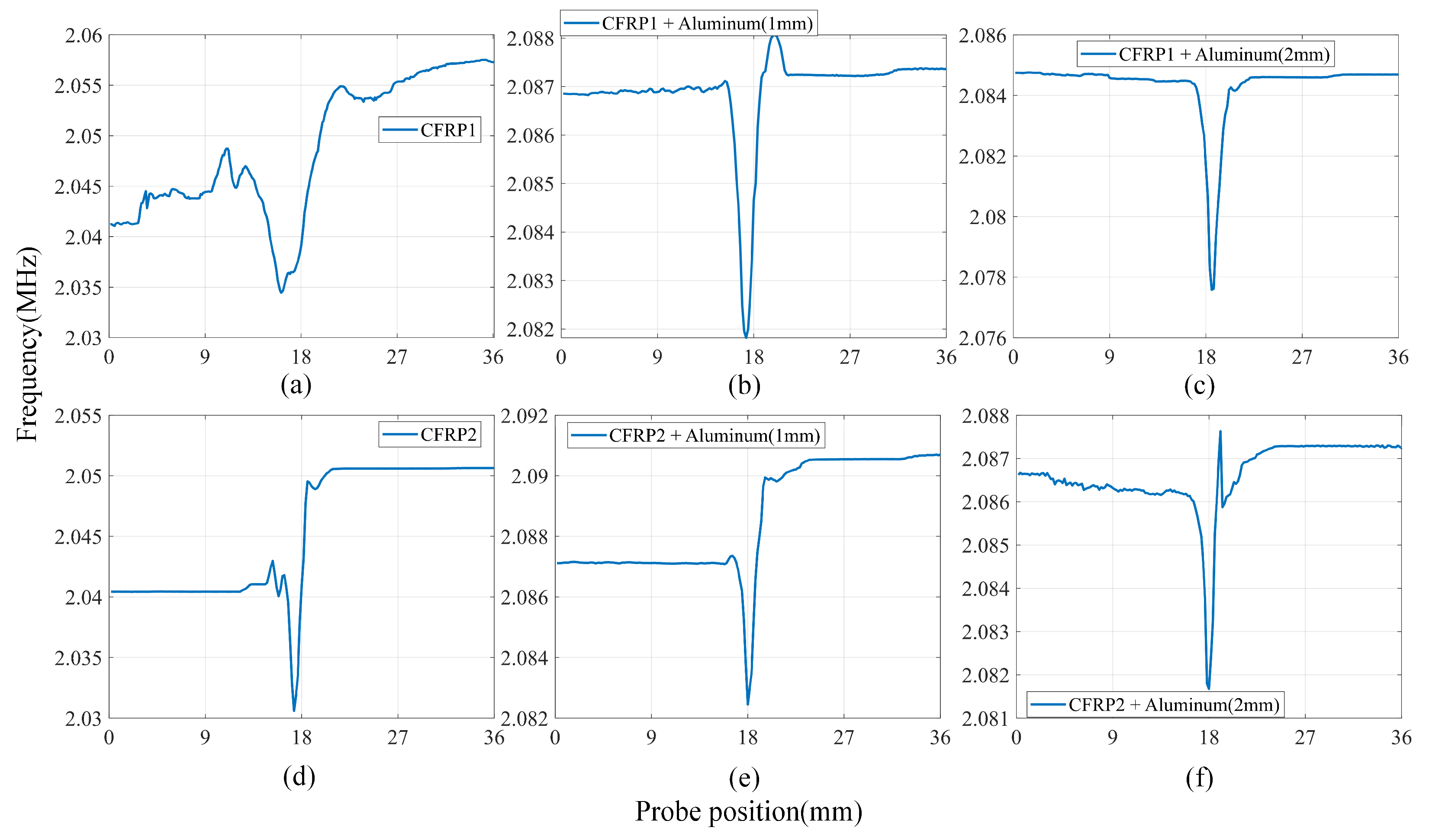
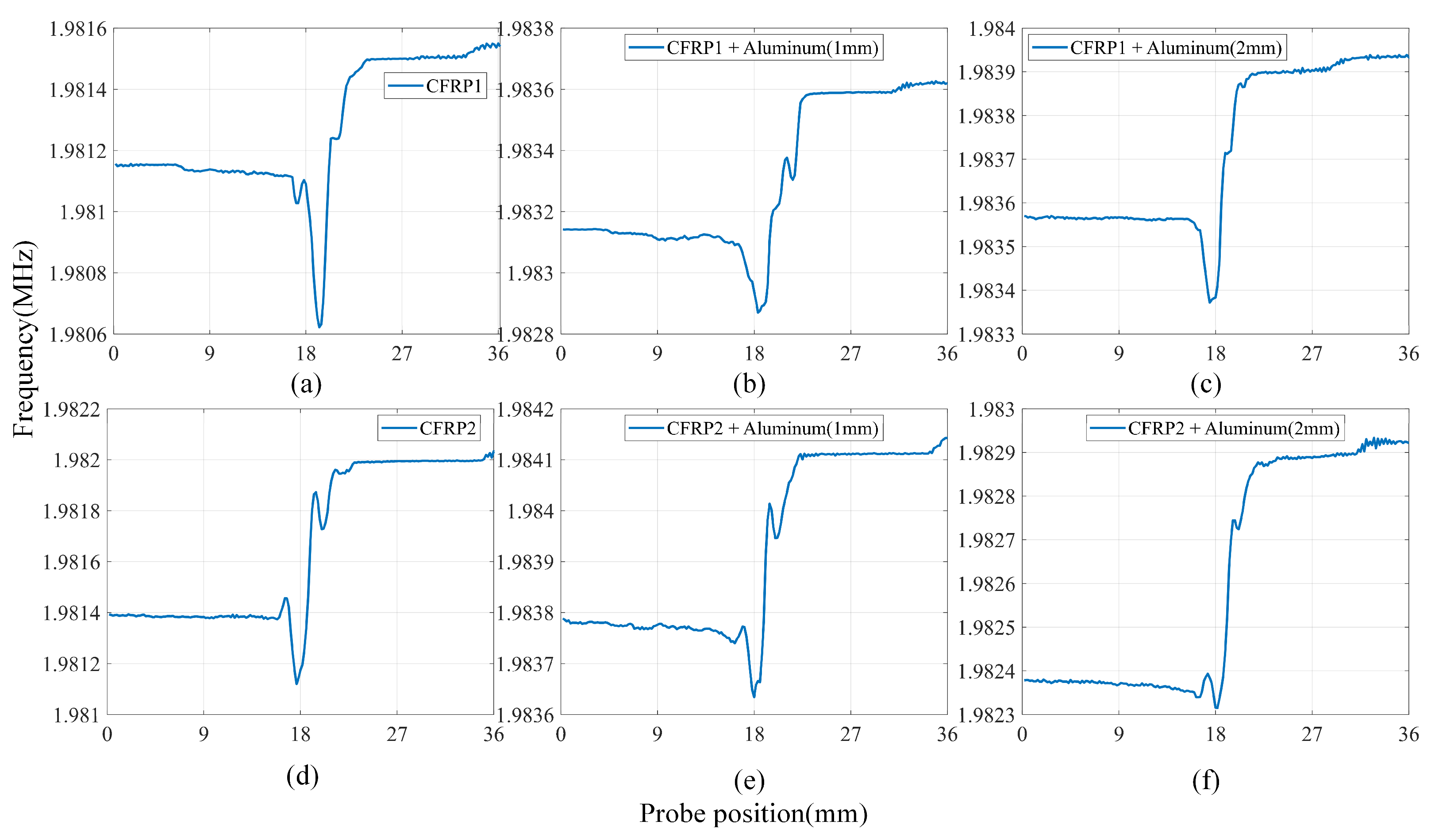
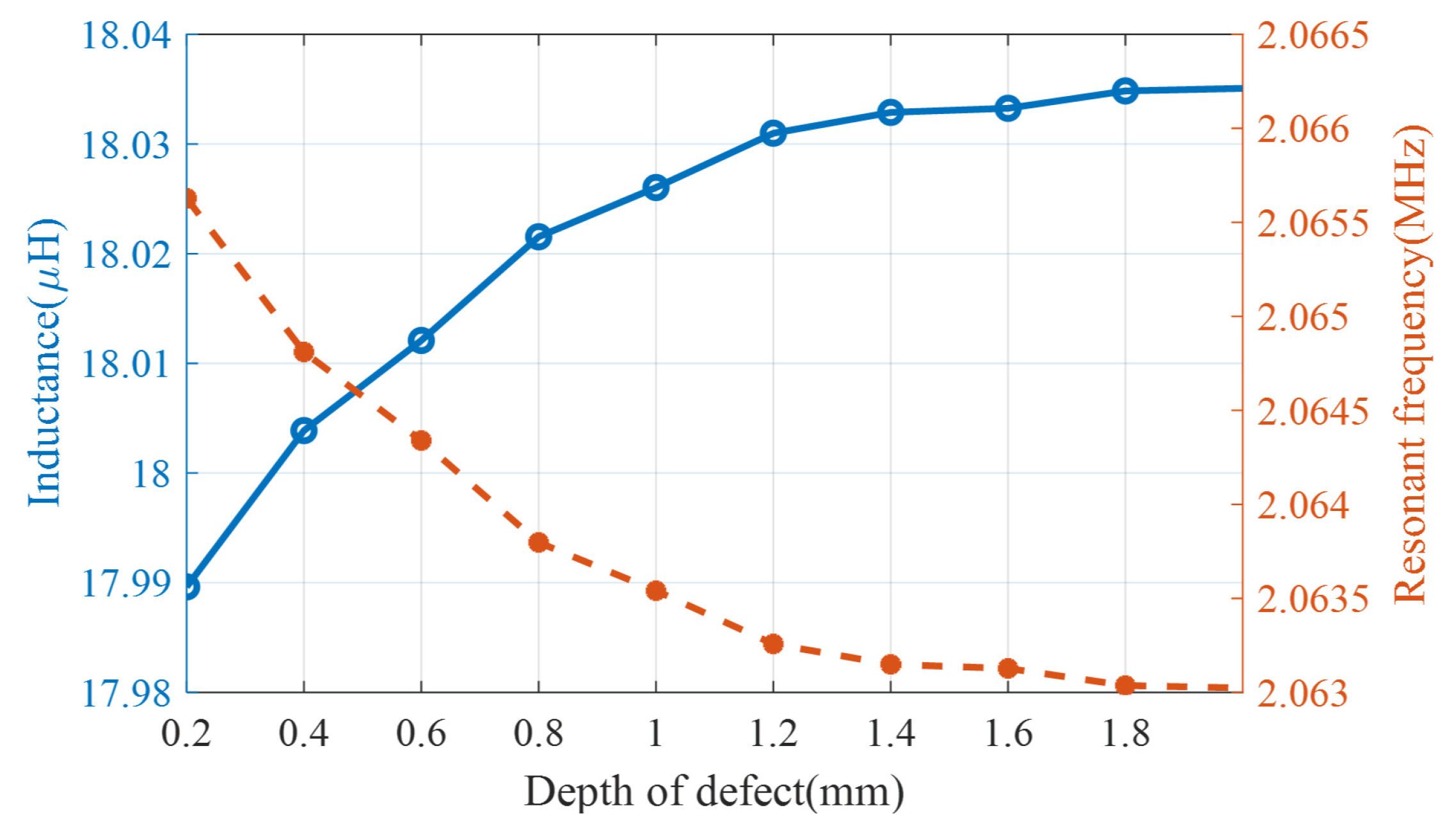
4.3. Depth Measurement of CFRP Defects
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wen, D.; Fan, M.; Cao, B.; Ye, B.; Tian, G. Extraction of LOI Features from Spectral Pulsed Eddy Current Signals for Evaluation of Ferromagnetic Samples. IEEE Sens. J. 2019, 19, 189–195. [Google Scholar] [CrossRef]
- Wang, H.; Li, W.; Feng, Z. Noncontact Thickness Measurement of Metal Films Using Eddy-Current Sensors Immune to Distance Variation. IEEE Trans. Instrum. Meas. 2015, 64, 2557–2564. [Google Scholar] [CrossRef]
- Salas Avila, J.R.; Lu, M.; Huang, R.; Chen, Z.; Zhu, S.; Yin, W. Accurate measurements of plate thickness with variable lift-off using a combined inductive and capacitive sensor. NDT E Int. 2020, 110, 102202. [Google Scholar] [CrossRef]
- Ali, A.; Asif, A.; Tian, G.Y.; Aziz, F.; Ul Abdin, M.Z. Directly-digitized pulsed eddy current based quantification of aluminum sheet thickness. Meas. Sci. Technol. 2023, 34, 125902. [Google Scholar] [CrossRef]
- Chen, Z.; Fan, M.; Cao, B.; Hu, B.; Sha, J. Characterization of image sequences of a defect using pulsed eddy current signals. J. Magn. Magn. Mater. 2021, 534, 168007. [Google Scholar] [CrossRef]
- Yu, Z.; Fu, Y.; Jiang, L.; Yang, F. Detection of circumferential cracks in heat exchanger tubes using pulsed eddy current testing. NDT E Int. 2021, 121, 102444. [Google Scholar] [CrossRef]
- Lu, M.; Yin, L.; Peyton, A.J.; Yin, W. A Novel Compensation Algorithm for Thickness Measurement Immune to Lift-Off Variations Using Eddy Current Method. IEEE Trans. Instrum. Meas. 2016, 65, 2773–2779. [Google Scholar] [CrossRef]
- Lu, M.; Xu, H.; Zhu, W.; Yin, L.; Zhao, Q.; Peyton, A.; Yin, W. Conductivity Lift-off Invariance and measurement of permeability for ferrite metallic plates. NDT E Int. 2018, 95, 36–44. [Google Scholar] [CrossRef]
- Usanov, D.A.; Postelga, A.E. Simultaneous determination of electrical conductivity and thickness of the semiconductor layers in the dielectric-semiconductor structures as per microwave reflection spectra. In Proceedings of the 2011 21st International Crimean Conference “Microwave & Telecommunication Technology”, Sevastopol, Ukraine, 12–16 September 2011; pp. 672–673. [Google Scholar]
- Zhao, Q.; Zhang, K.; Zhu, S.; Xu, H.; Cao, D.; Zhao, L.; Zhang, R.; Yin, W. Review on the Electrical Resistance/Conductivity of Carbon Fiber Reinforced Polymer. Appl. Sci. 2019, 9, 2390. [Google Scholar] [CrossRef]
- Chen, W.; Wu, D.; Wang, X.; Wang, T. A self-frequency-conversion eddy current testing method. Measurement 2022, 195, 111129. [Google Scholar] [CrossRef]
- Wu, D.; Cheng, F.; Yang, F.; Huang, C. Non-destructive testing for carbon-fiber-reinforced plastic (CFRP) using a novel eddy current probe. Compos. Part B Eng. 2019, 177, 107460. [Google Scholar] [CrossRef]
- Koyama, K.; Hoshikawa, H.; Kojima, G. Eddy Current Nondestructive Testing for Carbon Fiber- Reinforced Composites. J. Press. Vessel. Technol. 2013, 135, 041501. [Google Scholar] [CrossRef]
- Mizukami, K.; Ibrahim AS b Ogi, K.; Matvieieva, N.; Kharabet, I.; Schulze, M.; Heuer, H. Enhancement of sensitivity to delamination in eddy current testing of carbon fiber composites by varying probe geometry. Compos. Struct. 2019, 226, 111227. [Google Scholar] [CrossRef]
- Matsunaga, W.; Mizukami, K.; Mizutani, Y.; Todoroki, A. Applicability of eddy current testing in CFRP using electrodes on CFRP surface and control of the testing range. Adv. Compos. Mater. 2022, 31, 538–551. [Google Scholar] [CrossRef]
- Kosukegawa, H.; Kiso, Y.; Yoshikawa, Y.; Urayama, R.; Takagi, T. Characterization of laminated structure on scarfed slope of CFRP by utilizing eddy current testing with differential type probe. Int. J. Appl. Electromagn. Mech. 2019, 59, 1227–1238. [Google Scholar] [CrossRef]
- Cheng, J.; Qiu, J.; Ji, H.; Wang, E.; Takagi, T.; Uchimoto, T. Application of low frequency ECT method in noncontact detection and visualization of CFRP material. Compos. Part B Eng. 2017, 110, 141–152. [Google Scholar] [CrossRef]
- Pasadas, D.J.; Ramos, H.G.; Baskaran, P.; Ribeiro, A.L. ECT in composite materials using double excitation coils and resonant excitation/sensing circuits. Measurement 2020, 161, 107859. [Google Scholar] [CrossRef]
- Pasadas, D.J.; Barzegar, M.; Ribeiro, A.L.; Ramos, H.G. Locating and Imaging Fiber Breaks in CFRP Using Guided Wave Tomography and Eddy Current Testing. Sensors 2022, 22, 7377. [Google Scholar] [CrossRef] [PubMed]
- Farooq, M.; Iqbal, T.; Vazquez, P.; Farid, N.; Thampi, S.; Wijns, W.; Shahzad, A. Thin-Film Flexible Wireless Pressure Sensor for Continuous Pressure Monitoring in Medical Applications. Sensors 2020, 20, 6653. [Google Scholar] [CrossRef]
- Woodard, S.E.; Wang, C.; Taylor, B.D. Wireless temperature sensing using temperature-sensitive dielectrics within responding electric fields of open-circuit sensors having no electrical connections. Meas. Sci. Technol. 2010, 21, 075201. [Google Scholar] [CrossRef]
- Nopper, R.; Niekrawietz, R.; Reindl, L. Wireless Readout of Passive LC Sensors. IEEE Trans. Instrum. Meas. 2010, 59, 2450–2457. [Google Scholar] [CrossRef]
- Masud, M.; Vazquez, P.; Rehman, M.R.U.; Elahi, A.; Wijns, W.; Shahzad, A. Measurement Techniques and Challenges of Wireless LC Resonant Sensors: A Review. IEEE Access 2023, 11, 95235–95252. [Google Scholar] [CrossRef]
- Huang, Q.A.; Dong, L.; Wang, L.F. LC Passive Wireless Sensors Toward a Wireless Sensing Platform: Status, Prospects, and Challenges. J. Microelectromech. Syst. 2016, 25, 822–841. [Google Scholar] [CrossRef]
- Tian, G.; Yang, C.; Lu, X.; Wang, Z.; Liang, Z.; Li, X. Inductance-to-digital converters (LDC) based integrative multi-parameter eddy current testing sensors for NDT&E. NDT E Int. 2023, 138, 102888. [Google Scholar]
- Zhang, M.; Zhou, C.; Zeng, L.; Hou, X.; Xu, J.; Xu, L.; Wang, F.; Zhuang, W.; Chen, Y.; Chen, M.; et al. Noninvasive Cerebral Blood Flow Monitoring Using Inductive Sensing Technology. IEEE Trans. Instrum. Meas. 2023, 72, 1–10. [Google Scholar] [CrossRef]
- Brezulianu, A.; Geman, O.; Zbancioc, M.D.; Hagan, M.; Aghion, C.; Hemanth, D.J.; Son, L.H. IoT Based Heart Activity Monitoring Using Inductive Sensors. Sensors 2019, 19, 3284. [Google Scholar] [CrossRef]
- Rapp, B.; Hussam, A. Sensing and simulation of self-inductance of a flat, circular coil in the presence of four water-based nanofluids. J. Appl. Phys. 2023, 133, 134302. [Google Scholar] [CrossRef]
- Kong, L.; Li, G.; Wang, Y.; Cheng, L.; Lin, L. Non-contact cardiopulmonary signal monitoring based on magnetic eddy current induction. Rev. Sci. Instrum. 2023, 94, 074101. [Google Scholar] [CrossRef] [PubMed]
- Nabavi, M.R.; Nihtianov, S.N. Design Strategies for Eddy-Current Displacement Sensor Systems: Review and Recommendations. IEEE Sens. J. 2012, 12, 3346–3355. [Google Scholar] [CrossRef]
- Mohan, S.S.; del Mar Hershenson, M.; Boyd, S.P.; Lee, T.H. Simple accurate expressions for planar spiral inductances. IEEE J. Solid-State Circuits 1999, 34, 1419–1424. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, J.; Liu, S.; Ma, M.; Fang, H.; Cheng, J.; Zhang, D. Non-Destructive Testing of Carbon Fibre Reinforced Plastics (CFRP) Using a Dual Transmitter-Receiver Differential Eddy Current Test Probe. Sensors 2022, 22, 6761. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.; Li, X.; Xie, S.; Yang, S.; Chen, Z. Reconstruction of cracks in a carbon fiber-reinforced polymer laminate plate from signals of eddy current testing. J. Compos. Mater. 2020, 54, 3527–3536. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Closely Wound Coil | Spaced Planar Coil | |
|---|---|---|
| inner diameter | 11 mm | |
| outer diameter | 25 mm | |
| height | 1 mm | |
| turn width | 1 mm | |
| turn spacing | 0 mm | 1 mm |
| number of turns | 7 | 4 |
| Parameter | Value |
|---|---|
| inner diameter | 2 mm |
| outer diameter | 14 mm |
| turn width | 0.15 mm |
| turn spacing | 0.15 mm |
| number of turns | 20 |
| Length | Width | Thicknesses | Defect Length | Defect Width | Defect Depth | |
|---|---|---|---|---|---|---|
| Aluminium0 | 200 mm | 200 mm | 3 mm | 22 mm | 2 mm | 1 mm |
| CFRP1/CFRP2 | 220 mm | 200 mm | 2 mm | 10 mm | 0.5 mm | 0.8 mm |
| Aluminium1 | 200 mm | 200 mm | 1 mm | without defect | ||
| Aluminium2 | 200 mm | 200 mm | 2 mm | |||
| Probe Types | Signal Types | Amplitude at Defect | Amplitude at No Defect | The Signal Change Rate |
|---|---|---|---|---|
| LC Resonator | Frequency (MHz) | 2.88134 | 3.01086 | 4.30% |
| Concentric T-R probe | Voltage (mV) | −0.95905 | −0.99877 | 3.98% |
| Side-by-side T-R probe | Voltage (mV) | −14.7706 | −14.7994 | 0.19% |
| 0° | 30° | 60° | 90° | |
|---|---|---|---|---|
| LC Resonator | 5.7313 mm | 3.5821 mm | 3.2239 mm | 1.6119 mm |
| Concentric T-R probe | 7.6800 mm | 5.8800 mm | 5.4000 mm | 5.7600 mm |
| Side-by-side T-R probe | 7.9200 mm | 10.8000 mm | 7.2000 mm | 5.4000 mm |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, M.; Liu, S.; Zhang, R.; Zhang, Q.; Wu, Y.; Chen, B. Non-Destructive Testing of Carbon Fiber-Reinforced Plastics (CFRPs) Using a Resonant Eddy Current Sensor. Sensors 2024, 24, 3449. https://doi.org/10.3390/s24113449
Ma M, Liu S, Zhang R, Zhang Q, Wu Y, Chen B. Non-Destructive Testing of Carbon Fiber-Reinforced Plastics (CFRPs) Using a Resonant Eddy Current Sensor. Sensors. 2024; 24(11):3449. https://doi.org/10.3390/s24113449
Chicago/Turabian StyleMa, Ming, Shiyu Liu, Ronghua Zhang, Qiong Zhang, Yi Wu, and Bailiang Chen. 2024. "Non-Destructive Testing of Carbon Fiber-Reinforced Plastics (CFRPs) Using a Resonant Eddy Current Sensor" Sensors 24, no. 11: 3449. https://doi.org/10.3390/s24113449
APA StyleMa, M., Liu, S., Zhang, R., Zhang, Q., Wu, Y., & Chen, B. (2024). Non-Destructive Testing of Carbon Fiber-Reinforced Plastics (CFRPs) Using a Resonant Eddy Current Sensor. Sensors, 24(11), 3449. https://doi.org/10.3390/s24113449