

A Review of Wearable Optical Fiber Sensors for Rehabilitation Monitoring

Abstract
:1. Introduction
2. Working Principle of Wearable Optical Fiber Sensor
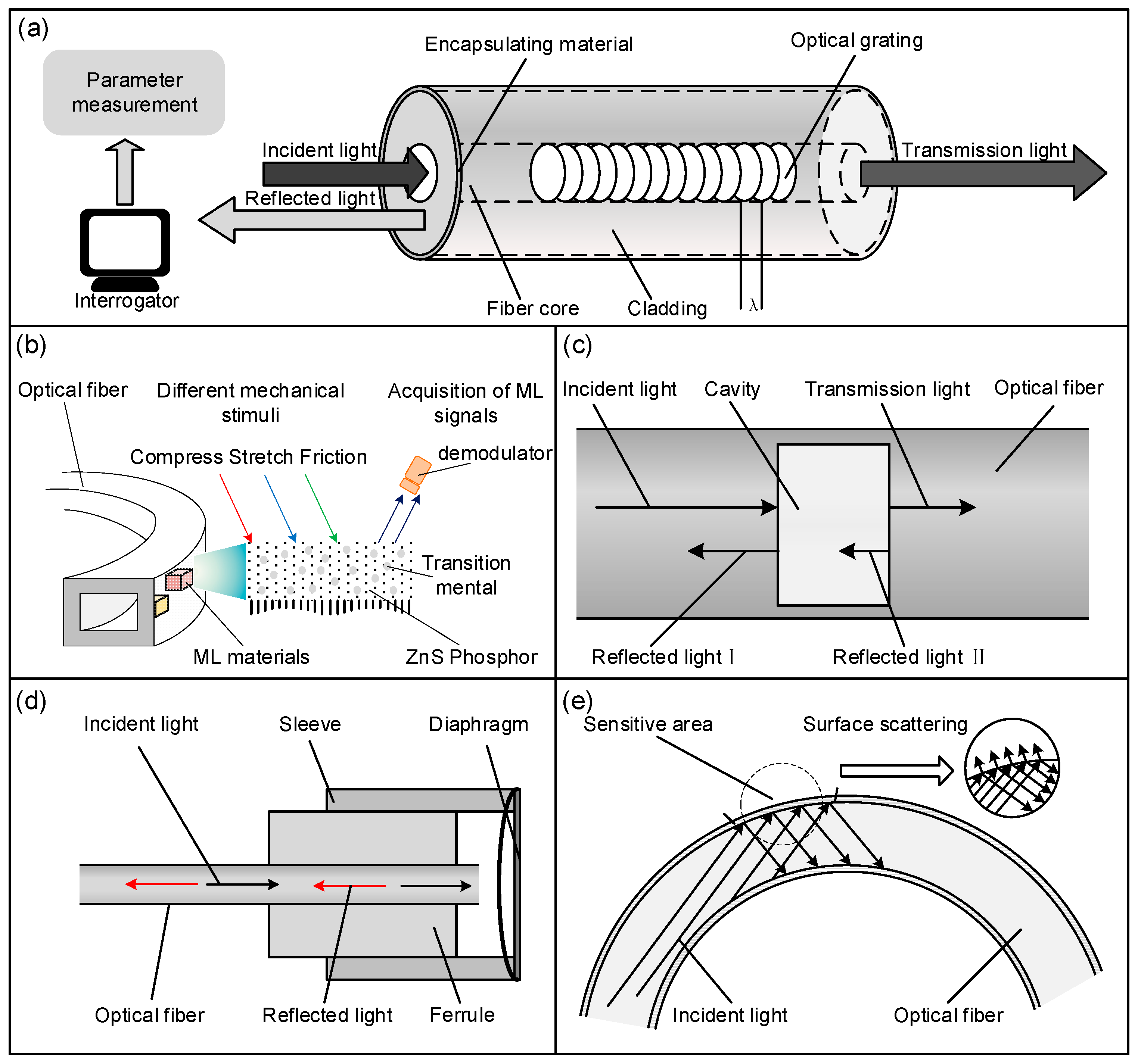
2.1. Fiber Bragg Grating Sensor
2.2. Self-Luminescent, Stretchable Optical Fiber Sensor
2.3. Optic Fiber Fabry–Perot Sensor
2.4. Polymer Optical Fiber Sensor
- Polishing: Specialized equipment and techniques are employed to polish the polymer optical fiber, and 3D printing may be utilized [61] to create smooth and sensitive regions, ensuring a smooth fiber surface for effective interaction with external media. Within this process, parameters such as the polishing length, depth, and curvature radius can influence the sensitivity of the sensor.
- Cladding Treatment: an appropriate cladding treatment is applied to the polished region to maintain optimal optical characteristics and mechanical integrity.
- Fixed Encapsulation: the polished optical fiber is securely encapsulated to safeguard the polished region and establish a connection with the sensor system.
2.5. Long-Period Fiber Grating Sensor
- Fiber Selection: choose an appropriate single-mode or specialty optical fiber as the base material.
- Grating Fabrication: use techniques such as ultraviolet light, CO2 lasers, or femtosecond lasers to inscribe periodic refractive index variations on the fiber, creating the LPFG structure.
- Chemical Etching: sometimes, chemical etching is required to adjust the parameters of the grating, such as by etching the outer cladding to enhance sensitivity to environmental conditions.
- Functional Coating: apply a specific material, like graphene oxide, onto the grating surface to provide chemical functionality, facilitating subsequent immobilization of biomolecules or other types of sensing applications.
2.6. Distributed Optical Fiber Sensor
2.7. Micro-/Nanofibers Sensor
- Electrospinning technology: This process uses high voltage to eject a polymer solution into fine fibers, creating fibers at the micro/nano-scale.
- Flame heating method: used for preparing silicon dioxide MNFs, this method heats standard optical fibers with a flame, gradually stretching and reducing their diameter.
- Laser heating method: A CO2 laser beam serves as the heat source for preparing MNFs with excellent surface smoothness and uniform diameter within a micro furnace.
- Chemical synthesis and nano-lithography: these techniques are used for fabricating polymer MNFs and include methods such as chemical synthesis, electrospinning, and physical drawing.
2.8. Performance Comparison of Wearable Optical Fiber Sensors
- Comparison of Advantages and Disadvantages: Self-luminescent, stretchable optical fiber sensors are superior in applications requiring no external power, yet they come with higher production costs and design complexities. In contrast, FBGs and Fabry–Perot sensors excel in precision monitoring for structural health, temperature, and strain measurements, though they have high production costs and require precise manufacturing processes. Diaphragm-type and polymer fiber optic sensors, however, provide better cost-effectiveness owing to simplified production processes and cost-efficient materials. LPFGs and DOFs offer highly sensitive detection of external physical quantities, but their practical use may require complex signal processing and data analysis.
- Materials and Costs: Material selection is crucial; self-luminescent, stretchable optical fiber sensors and FBG sensors often necessitate specific high-performance materials, influencing production costs. Fabry–Perot sensors utilize precision materials, yet their varied designs can accommodate cost control, to some extent. Diaphragm-type and polymer fiber optic sensors typically employ cost-effective, easily processed materials like polydimethylsiloxane (PDMS) and polycarbonate (PC). Material selection for LPFGs and DOFs hinges on sensing requirements and the ability to adapt to environmental conditions. Overall, material selection and cost management are pivotal in determining the broad application of sensors.
- Production and Manufacturing Processes: The unique nature of self-luminescent, stretchable optical fiber sensors demands intricate mechanical design and meticulous manufacturing processes. Producing FBGs and Fabry–Perot sensors requires sophisticated laser writing and precise controls, somewhat restricting their large-scale manufacturing. Diaphragm-type and polymer fiber optic sensors can utilize industrial polishing, 3D printing, and injection molding, thus lowering production barriers and costs. LPFGs fabrication entails creating periodic refractive index changes, potentially using UV exposure, CO2 lasers, or chemical etching. DOF production hinges on optical fiber selection, preparation, and sensor system integration and may include special treatments like doping or FBG fabrication.
3. The Application of Penetrable Optical Fiber Sensors in Finger Parameter Detection
3.1. Detection of Finger Movement
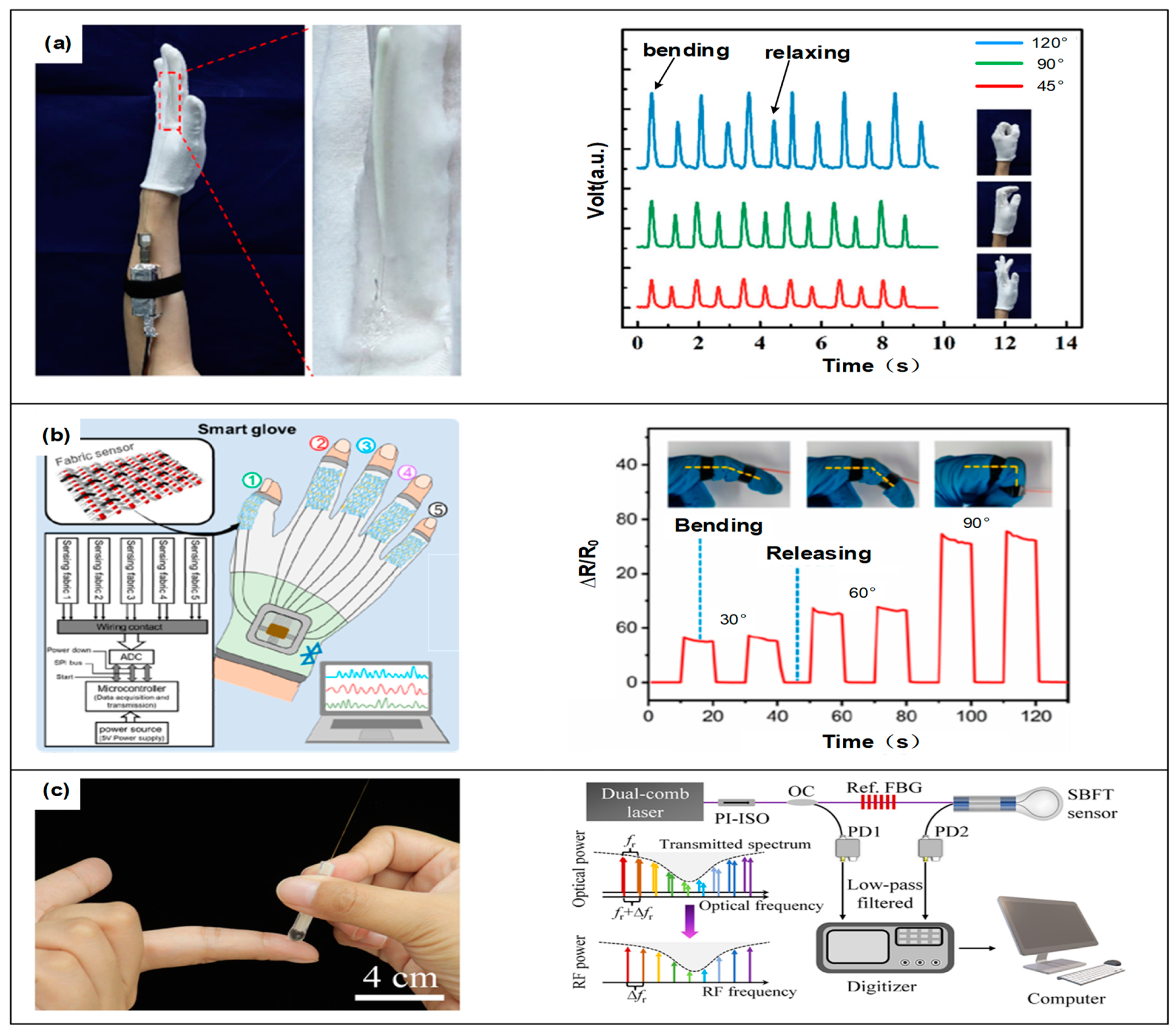
3.1.1. Gesture Recognition
3.1.2. Measurement of Finger Joint Angle
3.2. Detection of Finger Physiological Parameters
3.2.1. Blood Oxygen Saturation and Pulse Waveform
3.2.2. Skin Temperature
3.3. Detection of Finger Touch
4. Challenges and Future Research Directions of Wearable Optical Fiber Sensors
- They must exhibit high sensitivity and flexibility.
- The structure of the sensor must accurately detect changes at the measurement point, conform to the joints and muscles, accommodate the full range of human finger motion, and account for the effects of relative displacement and friction at the sensor-to-skin interface on measurement accuracy.
- Employing flexible encapsulation or manufacturing techniques, along with a thoughtful arrangement of optical fiber sensors, can fulfill the durability requirements necessary for wearable applications.
- It is essential to analyze the mechanical properties of flexible materials, ensure the stability and repeatability of their performance for long-term monitoring, and address the hysteresis inherent in flexible materials, which can affect measurement accuracy [103,104]. Hysteresis compensation techniques should be integrated to enhance the precision of the measured parameters.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- 2022 Revision of World Population Prospects. Available online: https://population.un.org/wpp/ (accessed on 20 May 2024).
- Maceira-Elvira, P.; Popa, T.; Schmid, A.C.; Hummel, F.C. Wearable technology in stroke rehabilitation: Towards improved diagnosis and treatment of upper-limb motor impairment. J. NeuroEng. Rehabil. 2019, 16, 142–159. [Google Scholar] [CrossRef]
- Lin, Y.; Shull, P.B. Novel, Soft, Water-Filled Acoustic Waveguides for Simultaneous Tactile Force and Location Sensing. IEEE Trans. Ind. Electron. 2023, 71, 8141–8155. [Google Scholar] [CrossRef]
- Nelson, B.W.; Low, C.A.; Jacobson, N.; Arean, P.; Torous, J.; Allen, N.B. Guidelines for wrist-worn consumer wearable assessment of heart rate in biobehavioral research. npj Digit. Med. 2020, 3, 30. [Google Scholar] [CrossRef]
- Feng, Y.; Ju, L.; Jia, H.; Liu, H.; Ding, X.; Zhang, W. Intentionally Light-Loss Carbon-Optic Fiber (COF) Twisted Sensor for Calf Strength Sensing via Monitoring Vastus Medialis. IEEE Sens. J. 2023, 23, 9271–9279. [Google Scholar] [CrossRef]
- Luo, J.; Liu, H.; Xing, H.; Zhu, R.; Chen, Z.; Xu, F. Large Curvature Bending Measurable Fiber-Optic Neurons for Multi-Joint Bending Perception. J. Light. Technol. 2023, 41, 5780–5787. [Google Scholar] [CrossRef]
- Zhang, L.; Tong, L. A bioinspired flexible optical sensor for force and orientation sensing. Opto-Electron. Adv. 2023, 6, 230051–230053. [Google Scholar] [CrossRef]
- Wang, X.; Chen, G.; Zhang, K.; Li, R.; Jiang, Z.; Zhou, H.; Gan, J.; He, M. Self-Healing Multimodal Flexible Optoelectronic Fiber Sensors. Chem. Mater. 2023, 35, 1345–1354. [Google Scholar] [CrossRef]
- Moreno, J.C.; Bueno, L. Wearable Robot Technologies, 1st ed.; Pons, J.L., Ed.; Wiley: Hoboken, NJ, USA, 2008; pp. 165–200. [Google Scholar]
- Jaramillo, I.E.; Jeong, J.G.; Lopez, P.R.; Lee, C.-H.; Kang, D.-Y.; Ha, T.-J.; Oh, J.-H.; Jung, H.; Lee, J.H.; Lee, W.H.; et al. Real-Time Human Activity Recognition with IMU and Encoder Sensors in Wearable Exoskeleton Robot via Deep Learning Networks. Sensors 2022, 22, 9690. [Google Scholar] [CrossRef]
- Othman, A.; Hamzah, N. Design and Development of an Adjustable Angle Sensor Based on Rotary Potentiometer for Measuring Finger Flexion. In Proceedings of the 2016 6th IEEE International Conference on Control System, Computing and Engineering (ICCSCE), Penang, Malaysia, 25–27 November 2016. [Google Scholar]
- Lorussi, F.; Galatolo, S.; De Rossi, D.E. Textile-Based Electrogoniometers for Wearable Posture and Gesture Capture Systems. IEEE Sens. J. 2009, 9, 1014–1024. [Google Scholar] [CrossRef]
- Yang, Y.S.; Bae, K.Y. The Modelling and Design of a Linear Variable Differential Transformer. Int. J. Precis. Eng. Manuf. 2022, 23, 153–162. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Frizera, A.; Vargas-Valencia, L.; dos Santos, W.M.; Bo, A.P.L.; Siqueira, A.A.G.; Pontes, M.J. Polymer Optical Fiber Sensors in Wearable Devices: Toward Novel Instrumentation Approaches for Gait Assistance Devices. IEEE Sens. J. 2018, 18, 7085–7092. [Google Scholar] [CrossRef]
- Zu, L.; Wang, X.; Liu, P.; Xie, J.; Zhang, X.; Liu, W.; Li, Z.; Zhang, S.; Li, K.; Giannetti, A.; et al. Ultrasensitive and Multiple Biomarker Discrimination for Alzheimer’s Disease via Plasmonic & Microfluidic Sensing Technologies. Adv. Sci. 2024, e2308783. [Google Scholar] [CrossRef]
- Bratash, O.; Buhot, A.; Leroy, L.; Engel, E. Optical fiber biosensors toward in vivo detection. Biosens. Bioelectron. 2024, 251, 116088. [Google Scholar] [CrossRef]
- Lopes, R.N.; Pinto, P.H.S.; Vargas, J.D.L.; Dante, A.; Macrae, A.; Allil, R.C.B.; Werneck, M.M. Development of an Immunocapture-Based Polymeric Optical Fiber Sensor for Bacterial Detection in Water. Polymers 2024, 16, 861. [Google Scholar] [CrossRef] [PubMed]
- Ashry, I.; Mao, Y.; Wang, B.; Hveding, F.; Bukhamsin, A.Y.; Ng, T.K.; Ooi, B.S. A Review of Distributed Fiber-Optic Sensing in the Oil and Gas Industry. J. Light. Technol. 2022, 40, 1407–1431. [Google Scholar] [CrossRef]
- Du, C.; Dutta, S.; Kurup, P.; Yu, T.; Wang, X. A review of railway infrastructure monitoring using fiber optic sensors. Sens. Actuators A Phys. 2020, 303, 111728. [Google Scholar] [CrossRef]
- Fan, L.; Bao, Y. Review of fiber optic sensors for corrosion monitoring in reinforced concrete. Cem. Concr. Comps. 2021, 120, 104029. [Google Scholar] [CrossRef]
- Alvarez-Montoya, J.; Carvajal-Castrillón, A.; Sierra-Pérez, J. In-flight and wireless damage detection in a UAV composite wing using fiber optic sensors and strain field pattern recognition. Mech. Syst. Signal Process. 2020, 136, 106526. [Google Scholar] [CrossRef]
- Cutolo, A.; Bernini, R.; Berruti, G.M.; Breglio, G.; Bruno, F.A.; Buontempo, S.; Catalano, E.; Consales, M.; Coscetta, A.; Cusano, A.; et al. Innovative Photonic Sensors for Safety and Security, Part II: Aerospace and Submarine Applications. Sensors 2023, 23, 2417. [Google Scholar] [CrossRef]
- Liu, Y.; Li, X.; Zhang, Y.-N.; Zhao, Y. Fiber-optic sensors based on Vernier effect. Measurement 2021, 167, 108451. [Google Scholar] [CrossRef]
- Zaltieri, M.; Massaroni, C.; Presti, D.L.; Bravi, M.; Sabbadini, R.; Miccinilli, S.; Sterzi, S.; Formica, D.; Schena, E. A Wearable Device Based on a Fiber Bragg Grating Sensor for Low Back Movements Monitoring. Sensors 2020, 20, 3825. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Qiu, L.; Ren, H. Distributed Curvature Sensing and Shape Reconstruction for Soft Manipulators with Irregular Cross Sections Based on Parallel Dual-FBG Arrays. IEEE/ASME Trans. Mechatron. 2020, 25, 406–417. [Google Scholar] [CrossRef]
- Zhang, W.; Jia, H.; Ju, L.; Shi, Y.; Ding, X.; Feng, Y. Bending-Sensitive Optical Waveguide Sensor with Carbon-Fiber Layer for Monitoring Grip Strength. IEEE Trans. Neural Syst. Rehabil. Eng. 2023, 31, 1922–1932. [Google Scholar] [CrossRef] [PubMed]
- Pan, J.; Zhang, Z.; Jiang, C.; Zhang, L.; Tong, L. A multifunctional skin-like wearable optical sensor based on an optical micro-/nanofibre. Nanoscale 2020, 12, 17538–17544. [Google Scholar] [CrossRef] [PubMed]
- Li, J.H.; Chen, J.H.; Xu, F. Sensitive and Wearable Optical Microfiber Sensor for Human Health Monitoring. Adv. Mater. Technol. 2018, 3, 1800296–1800303. [Google Scholar] [CrossRef]
- Presti, D.L.; Massaroni, C.; Zaltieri, M.; Sabbadini, R.; Carnevale, A.; Di Tocco, J.; Longo, U.G.; Caponero, M.A.; D’Amato, R.; Schena, E.; et al. A Magnetic Resonance-Compatible Wearable Device Based on Functionalized Fiber Optic Sensor for Respiratory Monitoring. IEEE Sens. J. 2021, 21, 14418–14425. [Google Scholar] [CrossRef]
- Leber, A.; Cholst, B. Stretchable Thermoplastic Elastomer Optical Fibers for Sensing of Extreme Deformations. Adv. Funct. Mater. 2018, 29, 1802629–1802636. [Google Scholar] [CrossRef]
- Bai, H.D.; Li, S.; Barreiros, J.; Tu, Y.; Pollock, C.R.; Shepherd, R.F. Stretchable distributed fiber-optic sensors. Science 2020, 370, 848–852. [Google Scholar] [CrossRef] [PubMed]
- Vargas-Valencia, L.S.; Schneider, F.B.A.; Leal-Junior, A.G.; Caicedo-Rodriguez, P.; Sierra-Arevalo, W.A.; Rodriguez-Cheu, L.E.; Bastos-Filho, T.F.; Frizera-Neto, A. Sleeve for Knee Angle Monitoring: An IMU-POF Sensor Fusion System. IEEE J. Biomed. Health Inf. 2021, 25, 465–474. [Google Scholar] [CrossRef]
- Fajardo, J.; Neto, A.R.; Ferman, V.; Muñoz, A.; Andrade, D.; Rohmer, E. A Wearable Robotic Glove based on Optical FMG Driven Controller. In Proceedings of the 2019 IEEE 4th International Conference on Advanced Robotics and Mechatronics (ICARM), Toyonaka, Japan, 3–5 July 2019. [Google Scholar]
- Lun, T.L.T.; Wang, K.; Ho, J.D.-L.; Lee, K.-H.; Sze, K.Y.; Kwok, K.-W. Real-Time Surface Shape Sensing for Soft and Flexible Structures Using Fiber Bragg Gratings. IEEE Rob. Autom. Lett. 2019, 4, 1454–1461. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, R.; Chen, W.; Liang, X.; Pfeifer, R. Shape Detection Algorithm for Soft Manipulator Based on Fiber Bragg Gratings. IEEE/ASME Trans. Mechatron. 2016, 21, 2977–2982. [Google Scholar] [CrossRef]
- He, Q.; Zhang, Q.C. A flexible temperature sensing finger using optical fiber grating for soft robot application. Optoelectron. Lett. 2021, 17, 400–406. [Google Scholar] [CrossRef]
- Wu, B.; Chen, H.; Xiao, S.; Wang, M.; Wang, Z.; Yan, F. High-Sensitivity Fiber-Optic Voltage Sensor Based on an Optoelectronic Oscillator Using a PZT-Stack and an Equivalent Phase-Shifted Fiber Bragg Grating. IEEE Sens. J. 2023, 23, 19332–19338. [Google Scholar] [CrossRef]
- Dang, W.; Li, Z.; Dan, J.; Nan, P.; Xin, G.; Lim, K.-S.; Ahmad, H.; Yang, H. High sensitivity fiber Bragg grating (FBG) sensor based on hollow core silica tube (HCST) sensitization for gas pressure and temperature discrimination. Opt. Fiber Technol. 2023, 75, 103202. [Google Scholar] [CrossRef]
- Ren, B.Y.; Chen, B.; Zhang, X.; Wu, H.; Fu, Y.; Peng, D. Mechanoluminescent optical fiber sensors for human-computer interaction. Sci. Bull. 2023, 68, 542–545. [Google Scholar] [CrossRef]
- Pevec, S.; Donlagic, D. Miniature all-fiber Fabry-Perot sensor for simultaneous measurement of pressure and temperature. Appl. Opt. 2012, 51, 4536–4541. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Wang, D.N.; Chen, W.P. Crescent shaped Fabry-Perot fiber cavity for ultra-sensitive strain measurement. Sci. Rep. 2016, 6, 38390. [Google Scholar] [CrossRef] [PubMed]
- Cibula, E.; Donlagic, D. In-line short cavity Fabry-Perot strain sensor for quasi distributed measurement utilizing standard OTDR. Opt. Express 2007, 15, 8719–8730. [Google Scholar] [CrossRef] [PubMed]
- Liao, C.R.; Hu, T.Y.; Wang, D.N. Optical fiber Fabry-Perot interferometer cavity fabricated by femtosecond laser micromachining and fusion splicing for refractive index sensing. Opt. Express 2012, 20, 22813–22818. [Google Scholar] [CrossRef]
- Tian, M.; Lu, P.; Chen, L.; Liu, D.; Yang, M.; Zhang, J. Femtosecond laser fabricated in-line micro multicavity fiber FP interferometers sensor. Opt. Commun. 2014, 316, 80–85. [Google Scholar] [CrossRef]
- Li, J.J.; Liu, Y.; Qu, S. Research Progress on Optical Fiber Functional Devices Fabricated by Femtosecond Laser Micro-Nano Processing. Laser Optoelecton. Prog. 2020, 57, 111402–111417. [Google Scholar]
- Yang, F.; Tan, Y.; Jin, W.; Lin, Y.; Qi, Y.; Ho, H.L. Hollow-core fiber Fabry–Perot photothermal gas sensor. Opt. Lett. 2016, 41, 3025–3028. [Google Scholar] [CrossRef] [PubMed]
- Jia, P.; Fang, G.; Liang, T.; Hong, Y.; Tan, Q.; Chen, X.; Liu, W.; Xue, C.; Liu, J.; Zhang, W.; et al. Temperature-compensated fiber-optic Fabry–Perot interferometric gas refractive-index sensor based on hollow silica tube for high-temperature application. Sens. Actuators B Chem. 2017, 244, 226–232. [Google Scholar] [CrossRef]
- Yu, Y.Q.; Chen, X.; Huang, Q.; Du, C.; Ruan, S.; Wei, H. Enhancing the pressure sensitivity of a Fabry-Perot interferometer using a simplified hollow-core photonic crystal fiber with a microchannel. Appl. Phys. B Laser Opt. 2015, 120, 461–467. [Google Scholar] [CrossRef]
- Lee, C.L.; Ho, H.Y.; Gu, J.-H.; Yeh, T.-Y.; Tseng, C.-H. Dual hollow core fiber-based Fabry-Perot interferometer for measuring the thermo-optic coefficients of liquids. Opt. Lett. 2015, 40, 459–462. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Chen, M.-Q.; Xia, F.; Lv, R.-Q. Small in-fiber Fabry-Perot low-frequency acoustic pressure sensor with PDMS diaphragm embedded in hollow-core fiber. Sens. Actuators A Phys. 2018, 270, 162–169. [Google Scholar] [CrossRef]
- Li, M.; Liu, Y.; Gao, R.; Li, Y.; Zhao, X.; Qu, S. Ultracompact fiber sensor tip based on liquid polymer-filled Fabry-Perot cavity with high temperature sensitivity. Sens. Actuators B Chem. 2016, 233, 496–501. [Google Scholar] [CrossRef]
- Zhu, C.; Huang, J. Highly Sensitive Humidity Sensor Based on Optical Fiber Fabry-Perot Interferometer. In Proceedings of the 2023 IEEE Sensors, Vienna, Austria, 29 October–1 November 2023. [Google Scholar]
- Liu, Z.; Zhao, B.; Zhang, Y.; Zhang, Y.; Sha, C.; Yang, J.; Yuan, L. Optical fiber temperature sensor based on Fabry-Perot interferometer with photopolymer material. Sens. Actuators A Phys. 2022, 347, 113894. [Google Scholar] [CrossRef]
- Monteiro, C.S.; Ferreira, M.S.; Silva, S.O.; Kobelke, J.; Schuster, K.; Bierlich, J.; Frazão, O. Fiber Fabry-Perot interferometer for curvature sensing. Photonic Sens. 2016, 6, 339–344. [Google Scholar] [CrossRef]
- Wang, S.; Lu, P.; Zhang, J.; Xu, H.; Yao, Q.; Chen, Y.; Liu, L.; Liao, H.; Sun, Y.; Ni, W.; et al. An Infrasound Sensor Based on Extrinsic Fiber-Optic Fabry–Perot Interferometer Structure. IEEE Photonics Technol. Lett. 2016, 28, 1264–1267. [Google Scholar] [CrossRef]
- Jiang, M.; Gerhard, E. A simple strain sensor using a thin film as a low-finesse fiber-optic Fabry–Perot interferometer. Sens. Actuators A Phys. 2001, 88, 41–46. [Google Scholar] [CrossRef]
- Wang, D.; Fan, S.; Jin, W. Graphene diaphragm analysis for pressure or acoustic sensor applications. Microsyst. Technol. 2013, 21, 117–122. [Google Scholar] [CrossRef]
- Wang, J.; Ai, F.; Sun, Q.; Liu, T.; Li, H.; Yan, Z.; Liu, D. Diaphragm-based optical fiber sensor array for multipoint acoustic detection. Opt. Express 2018, 26, 25293–25304. [Google Scholar] [CrossRef]
- Wang, J.; Liu, K.; Sun, Q.; Ni, X.; Ai, F.; Wang, S.; Yan, Z.; Liu, D. Diaphragm-based optical fiber sensor for pulse wave monitoring and cardiovascular diseases diagnosis. J. Biophotonics 2019, 12, 201900084–201900093. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Frizera, A.; Pontes, M.J. Sensitive zone parameters and curvature radius evaluation for polymer optical fiber curvature sensors. Opt. Laser Technol. 2018, 100, 272–281. [Google Scholar] [CrossRef]
- Li, C.; Liu, J.; Chi, Z.; Zhang, H.; Peng, X. Wearable Wrist Joint Movement Detection Using Two Sensitivity-Enhanced Plastic Optical Fibers. In Proceedings of the 2018 IEEE Sensors, New Delhi, India, 28–31 October 2018. [Google Scholar]
- Wang, L.; Zhang, W.; Chen, L.; Bai, Z.; Liu, F.; Yan, T. Torsion sensor based on two cascaded long period fiber gratings fabricated by CO2 laser pulse irradiation and HF etching technique respectively. J. Mod. Opt. 2016, 64, 541–545. [Google Scholar] [CrossRef]
- Chan, K.-H.; Lin, H.-J.; Hwang, S.-J. Long-period fiber gratings based on blue phase liquid crystal/polymer composites. Liq. Cryst. 2021, 49, 50–58. [Google Scholar] [CrossRef]
- Esposito, F.; Sansone, L.; Srivastava, A.; Cusano, A.M.; Campopiano, S.; Giordano, M.; Iadicicco, A. Label-free detection of vitamin D by optical biosensing based on long period fiber grating. Sens. Actuators B Chem. 2021, 347, 130637. [Google Scholar] [CrossRef]
- Zhu, C.; Huang, S.; Tang, C.; Yang, G.; Zhao, Y.; Li, H. Miniature Temperature-Independent Curvature Sensor Based on a Phase-Shifted Long-Period Fiber Grating Using Deep Tapering. IEEE Sens. J. 2023, 23, 14174–14181. [Google Scholar] [CrossRef]
- Ran, J.; Chen, Y.; Wang, G.; Zhong, Z.; Zhang, J.; Xu, O.; Huang, Q.; Lei, X. Mechanically Induced Long-Period Fiber Gratings and Applications. Photonics 2024, 11, 223. [Google Scholar] [CrossRef]
- Li, J.; Zhang, M. Physics and applications of Raman distributed optical fiber sensing. Light. Sci. Appl. 2022, 11, 128. [Google Scholar] [CrossRef] [PubMed]
- Bai, Q.; Wang, Q.; Wang, D.; Wang, Y.; Gao, Y.; Zhang, H.; Zhang, M.; Jin, B. Recent Advances in Brillouin Optical Time Domain Reflectometry. Sensors 2019, 19, 1862. [Google Scholar] [CrossRef] [PubMed]
- Lu, P.; Lalam, N.; Badar, M.; Liu, B.; Chorpening, B.T.; Buric, M.P.; Ohodnicki, P.R. Distributed optical fiber sensing: Review and perspective. Appl. Phys. Rev. 2019, 6, 041302. [Google Scholar] [CrossRef]
- Leal-Junior, A.G.; Ribeiro, D.; Avellar, L.M.; Silveira, M.; Díaz, C.A.R.; Frizera-Neto, A.; Blanc, W.; Rocon, E.; Marques, C. Wearable and Fully-Portable Smart Garment for Mechanical Perturbation Detection with Nanoparticles Optical Fibers. IEEE Sens. J. 2021, 21, 2995–3003. [Google Scholar] [CrossRef]
- Yin, J.; Reddy, V.S.; Chinnappan, A.; Ramakrishna, S.; Xu, L. Electrospun Micro/Nanofiber with Various Structures and Functions for Wearable Physical Sensors. Polym. Rev. 2022, 63, 715–762. [Google Scholar] [CrossRef]
- Ma, S.; Wang, X.; Li, P.; Yao, N.; Xiao, J.; Liu, H.; Zhang, Z.; Yu, L.; Tao, G.; Li, X.; et al. Optical Micro/Nano Fibers Enabled Smart Textiles for Human–Machine Interface. Adv. Fiber Mater. 2022, 4, 1108–1117. [Google Scholar] [CrossRef]
- Dang, H.; Chen, M.; Li, J.; Liu, W. Sensing performance improvement of resonating sensors based on knotting micro/nanofibers: A review. Measurement 2021, 170, 108706. [Google Scholar] [CrossRef]
- Zhang, L.; Tang, Y.; Tong, L. Micro-/Nanofiber Optics: Merging Photonics and Material Science on Nanoscale for Advanced Sensing Technology. iScience 2020, 23, 100810. [Google Scholar] [CrossRef]
- Shi, S.; Si, Y.F.; Han, Y.; Wu, T.; Iqbal, M.I.; Fei, B.; Li, R.K.Y.; Hu, J.; Qu, J. Recent Progress in Protective Membranes Fabricated via Electrospinning: Advanced Materials, Biomimetic Structures, and Functional Applications. Adv. Mater. 2022, 34, 2107938–2107968. [Google Scholar] [CrossRef]
- Cai, D.; Tong, T.; Zhang, Z.; Pan, J.; Zhang, L.; Tong, L. Functional Film Coated Optical Micro/Nanofibers for High-Performance Gas Sensing. IEEE Sens. J. 2019, 19, 9229–9234. [Google Scholar] [CrossRef]
- Li, X.; Chen, N.; Zhou, X.; Gong, P.; Wang, S.; Zhang, Y.; Zhao, Y. A review of specialty fiber biosensors based on interferometer configuration. J. Biophotonics 2021, 14, e202100068. [Google Scholar] [CrossRef]
- Ma, S.; Wang, Z.; Zhu, Y.; Tang, Y.; Fan, G.; Ma, B.; Ye, T.; Wei, L. Micro/nanofiber fabrication technologies for wearable sensors: A review. J. Micromech. Microeng. 2022, 32, 064002–064022. [Google Scholar] [CrossRef]
- Li, T.L.; Su, Y.F.; Chen, F.; Zheng, H.; Meng, W.; Liu, Z.; Ai, Q.; Liu, Q.; Tan, Y.; Zhou, Z. Bioinspired Stretchable Fiber-Based Sensor toward Intelligent Human-Machine Interactions. ACS Appl. Mater. Interfaces 2022, 14, 22666–22677. [Google Scholar] [CrossRef] [PubMed]
- Chen, M.H.; He, Y.C.; Liang, H.; Zhou, H.; Wang, X.; Heng, X.; Zhang, Z.; Gan, J.; Yang, Z. Stretchable and Strain-Decoupled Fluorescent Optical Fiber Sensor for Body Temperature and Movement Monitoring. ACS Photonics 2022, 9, 1415–1424. [Google Scholar] [CrossRef]
- Wang, S.P.; Wang, X.Y.; Wang, S.; Yu, W.; Yu, L.; Hou, L.; Tang, Y.; Zhang, Z.; Ni, Y.; Cao, C.; et al. Optical-Nanofiber-Enabled Gesture-Recognition Wristband for Human-Machine Interaction with the Assistance of Machine Learning. Adv. Intell. Syst. 2023, 5, 2200412–2200419. [Google Scholar] [CrossRef]
- Rao, H.C.; Luo, B.B.; Wu, D.; Yi, P.; Chen, F.; Shi, S.; Zou, X.; Chen, Y.; Zhao, M. Study on the Design and Performance of a Glove Based on the FBG Array for Hand Posture Sensing. Sensors 2023, 23, 8495. [Google Scholar] [CrossRef] [PubMed]
- Liang, H.H.; He, Y.C.; Chen, M.; Jiang, L.; Zhang, Z.; Heng, X.; Yang, L.; Hao, Y.; Wei, X.; Gan, J.; et al. Self-Powered Stretchable Mechanoluminescent Optical Fiber Strain Sensor. Adv. Intell. Syst. 2021, 3, 2100035–2100043. [Google Scholar] [CrossRef]
- Yang, W.F.; Gong, W.; Gu, W.; Liu, Z.; Hou, C.; Li, Y.; Zhang, Q.; Wang, H. Self-Powered Interactive Fiber Electronics with Visual-Digital Synergies. Adv. Mater. 2021, 33, 2104681–2104690. [Google Scholar] [CrossRef]
- Ge, Q.-Q.; Zhou, T.; Gong, T.-Y.; Liang, Y.; Ngiejungbwen, L.A.; Chen, M.-Y. Highly sensitive measurement of finger joint angle based on a double-U tapered POF embedded in PDMS film. Opt. Fiber Technol. 2023, 76, 103236. [Google Scholar] [CrossRef]
- Socorro-Leranoz, A.B.; Diaz, S.; Castillo, S.; Dreyer, U.J.; Martelli, C.; da Silva, J.C.C.; Uzqueda, I.; Gomez, M.; Zamarreno, C.R. Optical System Based on Multiplexed FBGs to Monitor Hand Movements. IEEE Sens. J. 2021, 21, 14081–14089. [Google Scholar] [CrossRef]
- Li, Z.; Tang, X.; Zhao, T.; Chen, K.; Zhang, T. Highly sensitive skin-like wearable optical sensor for human physiological signals monitoring. Opt. Fiber Technol. 2024, 82, 103652. [Google Scholar] [CrossRef]
- Guo, J.J.; Zhou, B.Q.; Zong, R.; Pan, L.; Li, X.; Yu, X.; Yang, C.; Kong, L.; Dai, Q. Stretchable and Highly Sensitive Optical Strain Sensors for Human-Activity Monitoring and Healthcare. ACS Appl. Mater. Interfaces 2019, 11, 33589–33598. [Google Scholar] [CrossRef]
- Li, Y.P.; Tan, S.J.; Yang, L.; Li, L.; Fang, F.; Sun, Q. Optical Microfiber Neuron for Finger Motion Perception. Adv. Fiber Mater. 2022, 4, 226–234. [Google Scholar] [CrossRef]
- Qu, X.Y.; Wu, Y.C.; Ji, P.; Wang, B.; Liang, Q.; Han, Z.; Li, J.; Wu, Z.; Chen, S.; Zhang, G.; et al. Crack-Based Core-Sheath Fiber Strain Sensors with an Ultralow Detection Limit and an Ultrawide Working Range. ACS Appl. Mater. Interfaces 2022, 14, 29167–29175. [Google Scholar] [CrossRef] [PubMed]
- Ballaji, H.K.; Correia, R.; Korposh, S.; Hayes-Gill, B.R.; Hernandez, F.U.; Salisbury, B.; Morgan, S.P. A Textile Sleeve for Monitoring Oxygen Saturation Using Multichannel Optical Fibre Photoplethysmography. Sensors 2020, 20, 6568. [Google Scholar] [CrossRef]
- Pant, S.; Umesh, S.; Asokan, S. A Novel Approach to Acquire the Arterial Pulse by Finger Plethysmography Using Fiber Bragg Grating Sensor. IEEE Sens. J. 2020, 20, 5921–5928. [Google Scholar] [CrossRef]
- Song, X.D.; Wang, Q.; Liu, Q.; Yu, L.; Wang, S.; Yao, N.; Tong, L.; Zhang, L. Twisted Optical Micro/Nanofibers Enabled Detection of Subtle Temperature Variation. ACS Appl. Mater. Interfaces 2023, 15, 47177–47183. [Google Scholar] [CrossRef] [PubMed]
- Li, L.; He, R.; Soares, M.S.; Savovic, S.; Hu, X.; Marques, C.; Min, R.; Li, X. Embedded FBG-Based Sensor for Joint Movement Monitoring. IEEE Sens. J. 2021, 21, 26793–26798. [Google Scholar] [CrossRef]
- Liu, W.; Yin, Z.; Song, D.; Yan, X.; Zhang, X.; Wang, F.; Suzuki, T.; Ohishi, Y.; Cheng, T. A ratiometric fluorescent fiber sensor based on integrated silica and tellurite glass for real-time human thermal monitoring. Ceram. Int. 2023, 49, 26049–26056. [Google Scholar] [CrossRef]
- Massari, L.; Fransvea, G.; D’abbraccio, J.; Filosa, M.; Terruso, G.; Aliperta, A.; D’alesio, G.; Zaltieri, M.; Schena, E.; Palermo, E.; et al. Functional mimicry of Ruffini receptors with fibre Bragg gratings and deep neural networks enables a bio-inspired large-area tactile-sensitive skin. Nat. Mach. Intell. 2022, 4, 425–435. [Google Scholar] [CrossRef]
- Sun, S.; He, S.; Han, Y.; Long, Y.; He, Z. Soft Bionic Skin with Touch-Slip and Thermal Perception Using Double-Layer Distributed FBG Sensing Array. IEEE Sens. J. 2022, 22, 4096–4105. [Google Scholar] [CrossRef]
- Yue, X.; Lu, R.; Yang, Q.; Song, E.; Jiang, H.; Ran, Y.; Guan, B.-O. Flexible Wearable Optical Sensor Based on Optical Microfiber Bragg Grating. J. Light. Technol. 2023, 41, 1858–1864. [Google Scholar] [CrossRef]
- Yao, N.; Wang, X.; Ma, S.; Song, X.; Wang, S.; Shi, Z.; Pan, J.; Wang, S.; Xiao, J.; Liu, H.; et al. Single optical microfiber enabled tactile sensor for simultaneous temperature and pressure measurement. Photonics Res. 2022, 10, 2040–2046. [Google Scholar] [CrossRef]
- Shang, C.; Fu, B.; Tuo, J.; Guo, X.; Li, Z.; Wang, Z.; Xu, L.; Guo, J. Soft Biomimetic Fiber-Optic Tactile Sensors Capable of Discriminating Temperature and Pressure. ACS Appl. Mater. Interfaces 2023, 15, 53264–53272. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Su, Y.; Zheng, H.; Chen, F.; Li, X.; Tan, Y.; Zhou, Z. An Artificial Intelligence-Motivated Skin-Like Optical Fiber Tactile Sensor. Adv. Intell. Syst. 2023, 5, 2200460–2200470. [Google Scholar] [CrossRef]
- Leal, A.; Avellar, L.; Jaimes, J.; Díaz, C.; dos Santos, W.; Siqueira, A.A.G.; Pontes, M.J.; Marques, C.; Frizera, A. Polymer Optical Fiber-Based Integrated Instrumentation in a Robot-Assisted Rehabilitation Smart Environment: A Proof of Concept. Sensors 2020, 20, 3199. [Google Scholar] [CrossRef] [PubMed]
- To, C.; Hellebrekers, T.; Jung, J.; Yoon, S.J.; Park, Y.-L. A Soft Optical Waveguide Coupled with Fiber Optics for Dynamic Pressure and Strain Sensing. IEEE Rob. Autom. Lett. 2018, 3, 3821–3827. [Google Scholar] [CrossRef]
- Leal, A.G.; Frizera, A.; Pontes, M.J. Dynamic Compensation Technique for POF Curvature Sensors. J. Light. Technol. 2018, 36, 1112–1117. [Google Scholar] [CrossRef]
- Dhanabalan, S.S.; Sriram, S.; Walia, S.; Avaninathan, S.R.; Carrasco, M.F.; Bhaskaran, M. Wearable Label-Free Optical Biodetectors: Progress and Perspectives. Adv. Photonics Res. 2020, 2, 2000076–2000093. [Google Scholar] [CrossRef]
- Zhang, C.; Ye, W.B. Bioinspired Artificial Sensory Nerve Based on Nafion Memristor. Adv. Funct. Mater. 2019, 29, 1808783–1808792. [Google Scholar] [CrossRef]
- Jiang, Y.; Ji, S.; Sun, J.; Huang, J.; Li, Y.; Zou, G.; Salim, T.; Wang, C.; Li, W.; Jin, H.; et al. A universal interface for plug-and-play assembly of stretchable devices. Nature 2023, 614, 456–462. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; Tan, Z.; Li, G.; Yang, J. A Sensitized Plastic Fiber Sensor for Multi-Point Bending Measurement Based on Deep Learning. IEEE Photonics J. 2021, 13, 1–7. [Google Scholar] [CrossRef]
- Hou, B.; Yi, L.; Li, C.; Zhao, H.; Zhang, R.; Zhou, B.; Liu, X. An interactive mouthguard based on mechanoluminescence-powered optical fibre sensors for bite-controlled device operation. Nat. Electron. 2022, 5, 682–693. [Google Scholar] [CrossRef]
- Wang, K.; Mizuno, Y.; Dong, X.; Kurz, W.; Koehler, M.; Kienle, P.; Lee, H.; Jakobi, M.; Koch, A.W. Multimode optical fiber sensors: From conventional to machine learning-assisted. Meas. Sci. Technol. 2023, 35, 022002–022027. [Google Scholar] [CrossRef]
- Martínez-Manuel, R.; Esquivel-Hernández, J.; Valentín-Coronado, L.M.; LaRochelle, S. Fiber-Optic Sensor for Directional Bending Monitoring Based on a Pattern Recognition Algorithm. IEEE Sens. J. 2023, 23, 4819–4824. [Google Scholar] [CrossRef]
- Zhong, T.; Cheng, M.; Lu, S.; Dong, X.; Li, Y. RCEN: A Deep-Learning-Based Background Noise Suppression Method for DAS-VSP Records. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Kot, P.; Muradov, M.; Gkantou, M.; Kamaris, G.S.; Hashim, K.; Yeboah, D. Recent Advancements in Non-Destructive Testing Techniques for Structural Health Monitoring. Appl. Sci. 2021, 11, 2750. [Google Scholar] [CrossRef]
- Ma, Z.; Song, Z.; Huang, X.; Guo, T.; Yuan, W.; Chen, H.; Zhang, T.; Wang, W. A Zero-Cross Detection Algorithm for Cavity-Length Interrogation of Fiber-Optic Fabry–Perot Sensors. Sensors 2019, 19, 38681. [Google Scholar] [CrossRef] [PubMed]
- Lin, M.-T. Quadri-directional optical bending sensor using side-emitting POF integrated with wearable device technology in smart glove. Int. J. Cloth. Sci. Tech. 2022, 34, 502–515. [Google Scholar] [CrossRef]
- Lu, M.; Wang, C.; Fan, R.; Lin, M.; Guang, J.; Peng, W. Review of Fiber-Optic Localized Surface Plasmon Resonance Sensors: Geometries, Fabrication Technologies, and Bio-Applications. Photonic Sens. 2024, 14, 240202. [Google Scholar] [CrossRef]
- Tian, X.; Qiu, X.; Li, H.; Lu, J.; Yang, C. Dynamically light-switched polarization-sensitive absorber based on semiconductor-incorporated metamaterial structure. Opt. Mater. 2024, 149, 115139. [Google Scholar] [CrossRef]
- Zhou, H.; Wang, X.; He, Y.; Liang, H.; Chen, M.; Liu, H.; Qasem, A.; Xiong, P.; Peng, D.; Gan, J.; et al. Distributed Strain Sensor Based on Self-Powered, Stretchable Mechanoluminescent Optical Fiber. Adv. Intell. Syst. 2023, 5, 2300482–2300495. [Google Scholar] [CrossRef]
- Yuan, C.; Fu, J.; Qu, F.; Zhou, Q. A combined MEMS thermal vacuum sensor with a wide pressure range. J. Micromech. Microeng. 2023, 34, 015006–015014. [Google Scholar] [CrossRef]
- Feng, Z.; Tang, Y.; Cheng, Y.; Sima, C.; Yuan, L. High-Spatial-Resolution Quasi-Distributed Fiber Sensing Technique Based on Cascaded FP Cavities and DSP Algorithm. J. Light. Technol. 2024, 42, 2186–2192. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
| Reference | Application | Type of Optical Fiber Sensors | Performance |
|---|---|---|---|
| [80] | Gesture recognition | SMF Sensor | Capable of recognizing up to 12 basic gestures with an accuracy rate as high as 94%. |
| [85] | Finger joint angle | POF Sensor | The sensitivity can reach 0.070 dB/°. |
| [87] | Pulse waveform | SCF Sensor | At pressures below 200 Pa, the sensitivity is 2.2 kPa−1; within the pressure range of 200–600 Pa, the sensitivity is 0.91 kPa−1. |
| [91] | Oxygen saturation and Heart rate | POF Sensor | Capable of rapidly responding to external pressure changes, with a response time of 5 milliseconds. |
| [93] | Temperature monitoring | MNF Sensor | Demonstrated a temperature sensitivity as high as −30 nm/°C. Capable of achieving a resolution of 0.0012 °C. |
| [96] | Tactile and temperature monitoring | FBG Sensor | Tactile sensitivity of 7.287 nm/MPa. Temperature sensitivity of 13 pm/°C. |
| [82] | Touch sensing and body temperature | FBG Sensor | A pressure sensitivity of 0.03 nm/kPa, a bending angle sensitivity of 0.19 nm/°, and a temperature sensitivity of 0.04 nm/°C. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, Y.; Wei, H.; Wang, C.; Liu, B. A Review of Wearable Optical Fiber Sensors for Rehabilitation Monitoring. Sensors 2024, 24, 3602. https://doi.org/10.3390/s24113602
Li X, Li Y, Wei H, Wang C, Liu B. A Review of Wearable Optical Fiber Sensors for Rehabilitation Monitoring. Sensors. 2024; 24(11):3602. https://doi.org/10.3390/s24113602
Chicago/Turabian StyleLi, Xiangmeng, Yongzhen Li, Huifen Wei, Chaohui Wang, and Bo Liu. 2024. "A Review of Wearable Optical Fiber Sensors for Rehabilitation Monitoring" Sensors 24, no. 11: 3602. https://doi.org/10.3390/s24113602
APA StyleLi, X., Li, Y., Wei, H., Wang, C., & Liu, B. (2024). A Review of Wearable Optical Fiber Sensors for Rehabilitation Monitoring. Sensors, 24(11), 3602. https://doi.org/10.3390/s24113602