
A Compact, Low-Cost, and Low-Power Turbidity Sensor for Continuous In Situ Stormwater Monitoring


Abstract
:1. Introduction
2. Materials and Methods
2.1. Turbidity Measurement Mechanism
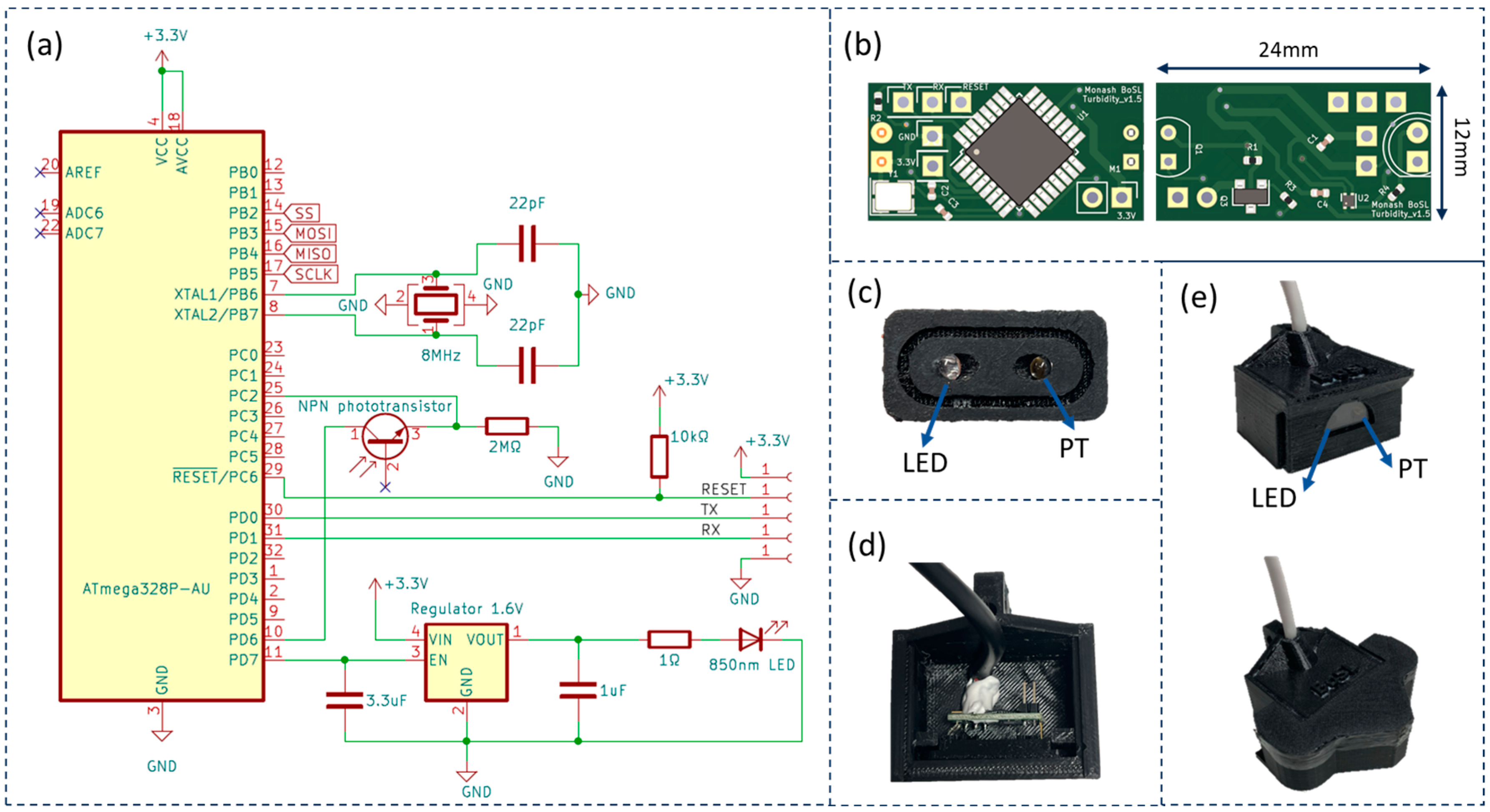
2.2. Electrical and Physical Overview
2.3. Removal of Ambient Interference
2.4. Sensor Operation
2.5. Sensor Cost
2.6. Power Consumption
2.7. Labortory Calibration
2.8. Field Validation
2.8.1. Validation Sites
2.8.2. Sensor Installation
2.8.3. Monitoring Regime
2.8.4. Sensor Maintenance and Calibration
- Step 1: Before cleaning. We used the diluted standard turbidity solutions (25, 50, 100, 150, and 250 NTU) for calibration; the preparation methods were the same as the lab calibration process (dilute the 4000 NTU standard turbidity solution). With the sensor becoming dirty after a period of field installation, such as mud or algae settling on the surface, it needed a general clean to avoid contamination of the turbidity solution. When cleaning the sensor, only the sensor body was cleaned, and the sensor surface where the LED and PT transmit/read remained untouched, so the biofilm impact of the sensor was able to be captured. When recording the monitoring data, the sensor probe was submerged in the turbidity solution, the reading of the sensors was taken and recorded, first, then checked against the turbidimeter to test the actual turbidity of the solution, which makes sure that an identical turbidity reading is captured. Both the low-cost sensor and the turbidity meter take three continuous readings and the average is calculated for comparison.
- Step 2: Cleaning. The probe of the sensor was carefully cleaned by DI water and delicate task wipers (Kimwipes); the sensor probe was wiped gently multiple times until no dirt or biofilm was obvious on the wiper.
- Step 3: After cleaning. After the probe was cleaned, the checking process was repeated as per Step 1, exactly, to assess after cleaning conditions.
2.8.5. Data Combination and Adjustments Based on Calibration Curves
2.8.6. Data Validation
- Criterion 1: Sensor monitoring status (in-water, for monitoring, or not). The sensor monitoring status was used to determine if the sensor was immersed in the water for monitoring purposes. This test verified whether the sensor remained fully submerged in the water, ensuring reliable monitoring of turbidity. If the water depth was insufficient, such that it fell below the top surface of the turbidity sensor, the collected data were identified as invalid. The sensor could be out of water for calibration and checking, for instance.
- Criterion 2: Missing data. Missing data at specific timestamps occurred due to various factors such as battery issues, hardware malfunctions, or software problems. In these cases, when the sensor failed to collect data, the corresponding data points at these timestamps were considered invalid or missing.
- Criterion 3: Turbidity (inside or outside the calibrated range of the sensor). After applying the calibration curves to the raw data from the two sensors, the calibrated turbidity values should fall within the calibrated range. Since the turbidity solutions used for calibration ranged from 0 NTU to 250 NTU, the reliable detection range for both sensors was set within the same range (0–250 NTU). Therefore, any calibrated turbidity values that fell outside this reliable detection range for their respective sensors were identified as not valid.
- Criterion 4: Continuous trend data. If the monitoring data exhibit a continuous trend of either increasing or decreasing for a period exceeding 7 days, and this trend remains consistent regardless of weather changes, the entirety of the continuous trend data is considered invalid and is assumed to have been caused by rapid build-up of material on the sensors surface.
- Criterion 5: Significant fouling. When conducting maintenance, if the presence of dirt, sediments, algae, or snails was observed on the surface of the sensor, it could have a substantial impact on the sensor readings. As it is difficult to determine precisely when the dirt started to accumulate on the sensor, the data collected during the monitoring period between the last maintenance and the current maintenance were regarded as uncertain.
- Criterion 6: Duration after the last maintenance. If the sensor had not undergone maintenance for a period exceeding two weeks, the data collected beyond the two-week mark from the last maintenance were designated as uncertain.
- Criterion 7: Filtering erratic values. To filter out erratic increases or decreases in sensor data, as well as unrealistic gradients that do not align with physical processes and local environmental conditions, the Page-Hinckley test was applied [63,64]. This testing method involves comparing the absolute sum of the difference between the residue and the cumulative average with a threshold. Determining the appropriate threshold involves an iterative process with a moving window. The moving average and threshold values need to be set differently for each sensor, considering their specific characteristics. Since the residue of turbidity results follows a normal distribution, around 10% of the total data can be expected to be removed based on this criterion. A sensitivity matrix can be constructed for each sensor, illustrating the amount of data to be removed with different moving window sizes and thresholds. This matrix enables the selection of the optimal combination of moving window and threshold values to effectively filter out inconsistent or erroneous data points.
2.8.7. Time Series Data Comparison
2.8.8. Statistical Analysis of the Comparison between the Two Sensors
2.8.9. Biofouling Impact of the Sensors
2.8.10. Permanent Drifting of Sensors
- Correlation between in-water time and relative difference. The relationship between the in-water time and the relative difference between the calibration curves was examined.
- Bias after deployment. The comparison of the after-cleaning calibration curves aimed to identify any significant bias or offset that may have occured in the sensors’ readings after being deployed in the water.
3. Results and Discussion
3.1. Power Consumption
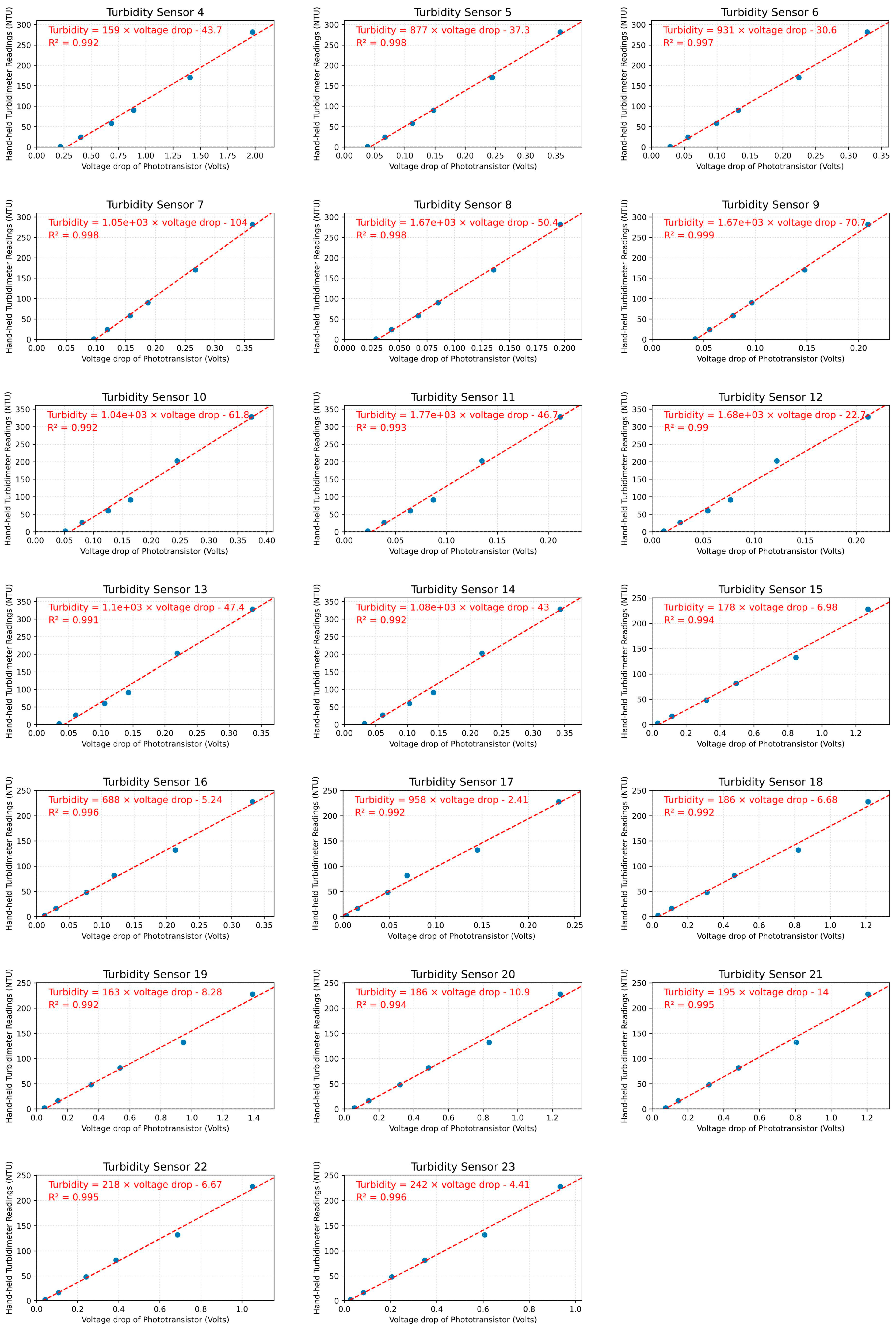
3.2. Laboratory Calibration
3.3. Field Validation
3.3.1. Data Cleaning
3.3.2. Time Series Data Comparison
3.3.3. Statistical Analysis of the Comparison between Our Low-Cost Sensor and the GreenSpan Sensor
3.3.4. Biofouling Impact of the Sensors
3.3.5. Drift of the Sensors
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Low-Cost Sensor Lab Test Results
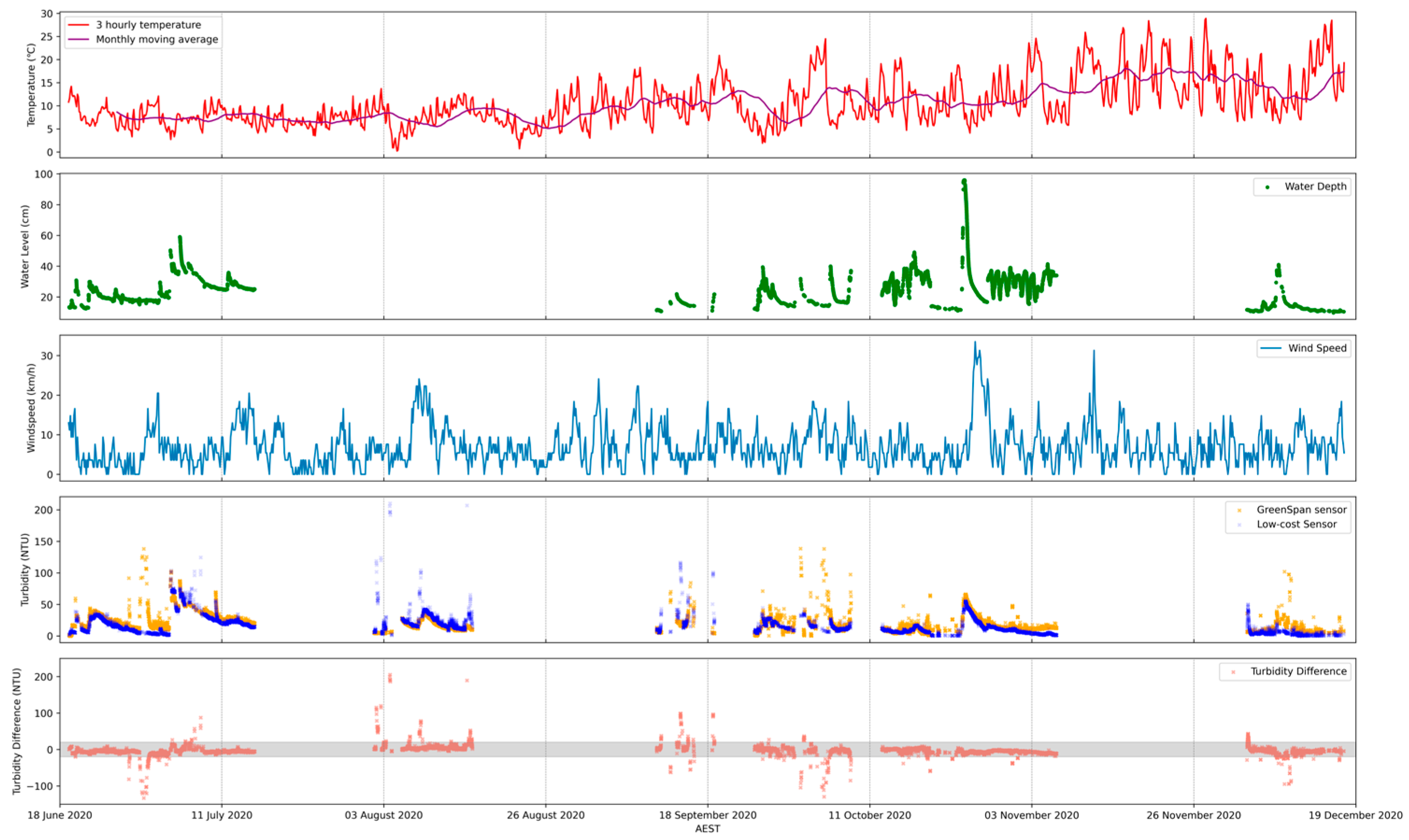
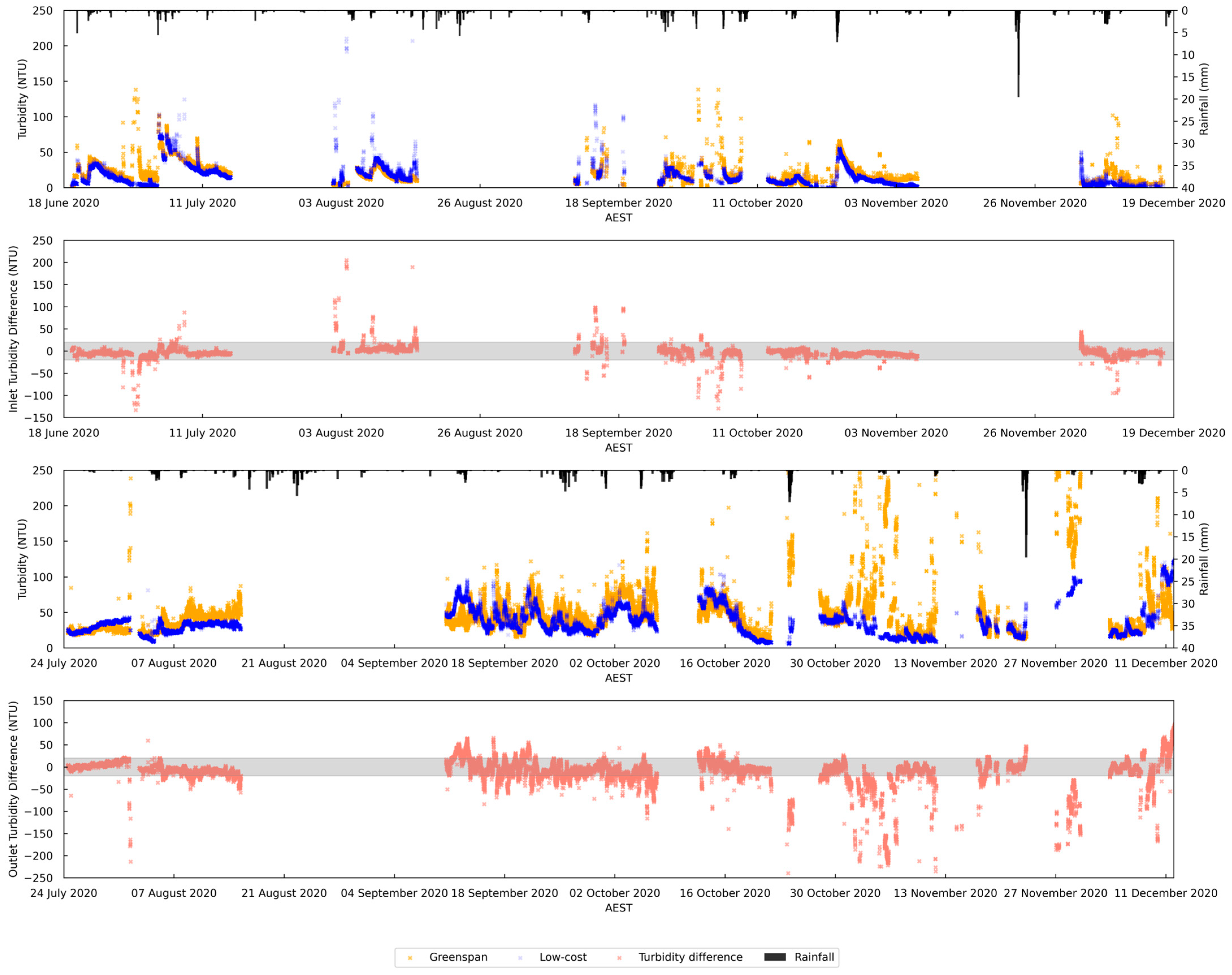
Appendix B. Sensor Time Series Data with the Weather Data

Appendix C. Evidence of the Debris on the Low-Cost Turbidity Sensor Surface

Appendix D. Relative Difference for Biofouling Issue

Appendix E. Relative Difference for Drift Issue

References
- Gaffield, S.J.; Goo, R.L.; Richards, L.A.; Jackson, R.J. Public health effects of inadequately managed stormwater runoff. Am. J. Public Health 2003, 93, 1527–1533. [Google Scholar] [CrossRef] [PubMed]
- Landsberg, J.H. The effects of harmful algal blooms on aquatic organisms. Rev. Fish. Sci. 2002, 10, 113–390. [Google Scholar] [CrossRef]
- Loucks, D.P.; Van Beek, E. Water Resource Systems Planning and Management: An Introduction to Methods, Models, and Applications; Springer: Berlin/Heidelberg, Germany, 2017; ISBN 3319442341. [Google Scholar]
- Withanachchi, S.S.; Ghambashidze, G.; Kunchulia, I.; Urushadze, T.; Ploeger, A. Water quality in surface water: A preliminary assessment of heavy metal contamination of the Mashavera river, Georgia. Int. J. Environ. Res. Public Health 2018, 15, 621. [Google Scholar] [CrossRef] [PubMed]
- Jaskuła, J.; Sojka, M.; Fiedler, M.; Wróżyński, R. Analysis of spatial variability of river bottom sediment pollution with heavy metals and assessment of potential ecological hazard for the Warta river, Poland. Minerals 2021, 11, 327. [Google Scholar] [CrossRef]
- Wilbers, G.J.; Becker, M.; Nga, L.T.; Sebesvari, Z.; Renaud, F.G. Spatial and temporal variability of surface water pollution in the Mekong Delta, Vietnam. Sci. Total Environ. 2014, 485–486, 653–665. [Google Scholar] [CrossRef] [PubMed]
- Nafi, Z.; Rohaizah, N.; Zaharin, A. Spatial variation impact of landscape patterns and land use on water quality across an urbanized watershed in Bentong, Malaysia. Ecol. Indic. 2021, 122, 107254. [Google Scholar] [CrossRef]
- Shi, B.; Bach, P.M.; Lintern, A.; Zhang, K.; Coleman, R.A.; Metzeling, L.; McCarthy, D.T.; Deletic, A. Understanding spatiotemporal variability of in-stream water quality in urban environments—A case study of Melbourne, Australia. J. Environ. Manag. 2019, 246, 203–213. [Google Scholar] [CrossRef] [PubMed]
- Bonhomme, C.; Petrucci, G. Should we trust build-up/wash-off water quality models at the scale of urban catchments? Water Res. 2017, 108, 422–431. [Google Scholar] [CrossRef]
- Dotto, C.B.S.; Kleidorfer, M.; Deletic, A.; Fletcher, T.D.; McCarthy, D.T.; Rauch, W. Stormwater quality models: Performance and sensitivity analysis. Water Sci. Technol. 2010, 62, 837–843. [Google Scholar] [CrossRef]
- Shi, B. Detecting and Understanding Urban Illicit Discharges by Utilising Newly Developed Low-Cost and IoT-Based Technologies. Doctoral Dissertation, Monash University, Clayton, Australia, 2021. [Google Scholar]
- Liu, Y.; Chen, Y.; Fang, X. A review of turbidity detection based on computer vision. IEEE Access 2018, 6, 60586–60604. [Google Scholar] [CrossRef]
- Huey, G.M.; Meyer, M.L. Turbidity as an indicator of water quality in diverse watersheds of the Upper Pecos River Basin. Water 2010, 2, 273–284. [Google Scholar] [CrossRef]
- Lambrou, T.P.; Anastasiou, C.C.; Panayiotou, C.G. A nephelometric turbidity system for monitoring residential drinking water quality. In Sensor Applications, Experimentation, and Logistics; Springer: Berlin/Heidelberg, Germany, 2010; Volume 29, pp. 43–55. [Google Scholar] [CrossRef]
- Lloyd, D.S. Turbidity as a water quality standard for salmonid habitats in Alaska. N. Am. J. Fish. Manag. 1987, 7, 34–45. [Google Scholar] [CrossRef]
- McCoy, W.F.; Olson, B.H. Relationship among turbidity, particle counts and bacteriological quality within water distribution lines. Water Res. 1986, 20, 1023–1029. [Google Scholar] [CrossRef]
- World Health Organization. Water Quality and Health-Review of Turbidity: Information for Regulators and Water Suppliers; World Health Organization: Geneva, Switzerland, 2017. [Google Scholar]
- Kitchener, B.G.B.; Wainwright, J.; Parsons, A.J. A review of the principles of turbidity measurement. Prog. Phys. Geogr. 2017, 41, 620–642. [Google Scholar] [CrossRef]
- Bin Omar, A.F.; MatJafri, M.Z. Bin Turbidimeter design and analysis: A review on optical fiber sensors for the measurement of water turbidity. Sensors 2009, 9, 8311–8335. [Google Scholar] [CrossRef] [PubMed]
- Farrell, C.; Hassard, F.; Jefferson, B.; Leziart, T.; Nocker, A.; Jarvis, P. Turbidity composition and the relationship with microbial attachment and UV inactivation efficacy. Sci. Total Environ. 2018, 624, 638–647. [Google Scholar] [CrossRef] [PubMed]
- Reilly, J.K.; Kippin, J.S. Relationship of Bacterial Counts With Turbidity and Free Chlorine in Two Distribution Systems. J. Am. Water Work. Assoc. 1983, 75, 309–312. [Google Scholar] [CrossRef]
- Romero, D.A.D.; Cristina, M.; Silva, D.A.; Cha, B.J.M. Biosand Filter as a Point-of-Use Water Treatment Technology: Influence of Turbidity on Microorganism Removal Efficiency. Water 2020, 12, 2302. [Google Scholar] [CrossRef]
- Kerkez, B.; Gruden, C.; Lewis, M.; Montestruque, L.; Quigley, M.; Wong, B.; Bedig, A.; Kertesz, R.; Braun, T.; Cadwalader, O.; et al. Smarter stormwater systems. Environ. Sci. Technol. 2016, 50, 7267–7273. [Google Scholar] [CrossRef]
- Duchrow, R.M.; Everhart, W.H. Turbidity measurement. Trans. Am. Fish. Soc. 1971, 100, 682–690. [Google Scholar] [CrossRef]
- McCarthy, D.T.; Hathaway, J.M.; Hunt, W.F.; Deletic, A. Intra-event variability of Escherichia coli and total suspended solids in urban stormwater runoff. Water Res. 2012, 46, 6661–6670. [Google Scholar] [CrossRef] [PubMed]
- Turbidity Sensor TS-1000A from Greenspan. Australian Made Sensors. Available online: https://www.essearth.com/product/ts1000-turbidity-sensor/ (accessed on 10 April 2024).
- Henckens, G.J.; Veldkamp, R.G.; Schuit, T.D. On Monitoring of Turbidity in Sewers. In Global Solutions for Urban Drainage; American Society of Civil Engineers: Reston, VA, USA, 2004. [Google Scholar]
- Adzuan, M.A.; Azman, A.A.; Rahiman, M.H.F. Design and development of infrared turbidity sensor for Aluminium Sulfate coagulant process. In Proceedings of the 2017 IEEE 8th Control and System Graduate Research Colloquium, ICSGRC, Shah Alam, Malaysia, 4–5 August 2017. [Google Scholar]
- Aiestaran, P.; Arrue, J.; Zubia, J. Design of a sensor based on plastic optical fibre (POF) to measure fluid flow and turbidity. Sensors 2009, 9, 3790–3800. [Google Scholar] [CrossRef] [PubMed]
- Azman, A.A.; Rahiman, M.H.F.; Taib, M.N.; Sidek, N.H.; Abu Bakar, I.A.; Ali, M.F. A low cost nephelometric turbidity sensor for continual domestic water quality monitoring system. In Proceedings of the 2016 IEEE International Conference on Automatic Control and Intelligent Systems (I2CACIS), Selangor, Malaysia, 22 October 2016; pp. 202–207. [Google Scholar] [CrossRef]
- Bilro, L.; Prats, S.A.; Pinto, J.L.; Keizer, J.J.; Nogueira, R.N. Design and performance assessment of a plastic optical fibre-based sensor for measuring water turbidity. Meas. Sci. Technol. 2010, 21, 107001. [Google Scholar] [CrossRef]
- García, A.; Pérez, M.A.; Ortega, G.J.G.; Dizy, J.T. A new design of low-cost four-beam turbidimeter by using optical fibers. IEEE Trans. Instrum. Meas. 2007, 56, 907–912. [Google Scholar] [CrossRef]
- Kirkey, W.D.; Bonner, J.S.; Fuller, C.B. Low-Cost Submersible Turbidity Sensors Using Low-Frequency Source Light Modulation. IEEE Sens. J. 2018, 18, 9151–9162. [Google Scholar] [CrossRef]
- Wei, J.; Qin, F.; Li, G.; Li, X.; Liu, X.; Dai, X. Chirp modulation enabled turbidity measurement for large scale monitoring of fresh water. Meas. J. Int. Meas. Confed. 2021, 184, 109989. [Google Scholar] [CrossRef]
- Wiranto, G.; Hermida, I.D.P.; Fatah, A. Waslaluddin Design and realisation of a turbidimeter using TSL250 photodetector and Arduino microcontroller. In Proceedings of the IEEE International Conference on Semiconductor Electronics, ICSE, Kuala Lumpur, Malaysia, 17–19 August 2016. [Google Scholar]
- Parra, L.; Rocher, J.; Escrivá, J.; Lloret, J. Design and development of low cost smart turbidity sensor for water quality monitoring in fish farms. Aquac. Eng. 2018, 81, 10–18. [Google Scholar] [CrossRef]
- Kelley, C.D.; Krolick, A.; Brunner, L.; Burklund, A.; Kahn, D.; Ball, W.P.; Weber-Shirk, M. An affordable open-source turbidimeter. Sensors 2014, 14, 7142–7155. [Google Scholar] [CrossRef] [PubMed]
- Metzger, M.; Konrad, A.; Blendinger, F.; Modler, A.; Meixner, A.J.; Bucher, V.; Brecht, M. Low-cost GRIN-Lens-based nephelometric turbidity sensing in the range of 0.1–1000 NTU. Sensors 2018, 18, 1115. [Google Scholar] [CrossRef]
- Bayram, A.; Yalcin, E.; Demic, S.; Gunduz, O.; Solmaz, M.E. Development and application of a low-cost smartphone-based turbidimeter using scattered light. Appl. Opt. 2018, 57, 5935–5940. [Google Scholar] [CrossRef]
- Kitchener, B.G.B.; Dixon, S.D.; Howarth, K.O.; Parsons, A.J.; Wainwright, J.; Bateman, M.D.; Cooper, J.R.; Hargrave, G.K.; Long, E.J.; Hewett, C.J.M. A low-cost bench-top research device for turbidity measurement by radially distributed illumination intensity sensing at multiple wavelengths. HardwareX 2019, 5, e00052. [Google Scholar] [CrossRef]
- Wang, Y.; Rajib, S.M.S.M.; Collins, C.; Grieve, B. Low-Cost Turbidity Sensor for Low-Power Wireless Monitoring of Fresh-Water Courses. IEEE Sens. J. 2018, 18, 4689–4696. [Google Scholar] [CrossRef]
- Snazelle, T.T. Field Comparison of Five In Situ Turbidity Sensors; US Geological Survey: Reston, VA, USA, 2020. [Google Scholar]
- Sampedro, Ó.; Salgueiro, J.R. Turbidimeter and RGB sensor for remote measurements in an aquatic medium. Meas. J. Int. Meas. Confed. 2015, 68, 128–134. [Google Scholar] [CrossRef]
- Jiang, H.; Hu, Y.; Yang, H.; Wang, Y.; Ye, S. A Highly Sensitive Deep-Sea In-Situ Turbidity Sensor with Spectrum Optimization Modulation-Demodulation Method. IEEE Sens. J. 2020, 20, 6441–6449. [Google Scholar] [CrossRef]
- Samah, A.H.A.; Rahman, M.F.A.; Omar, A.F.; Ahmad, K.A.; Yahaya, S.Z. Sensing mechanism of water turbidity using LED for in situ monitoring system. In Proceedings of the 2017 IEEE 7th International Conference on Underwater System Technology: Theory and Applications (USYS), Kuala Lumpur, Malaysia, 18–20 December 2017. [Google Scholar] [CrossRef]
- ISO7027; Water Quality-Determination of Turbidity-Part 1. ISO: Geneva, Switzerland, 2016.
- Bradley, L.J.; Wright, N.G. Optimising SD Saving Events to Maximise Battery Lifetime for Arduino TM/Atmega328P Data Loggers. IEEE Access 2020, 8, 214832–214841. [Google Scholar] [CrossRef]
- Catsamas, S.; Shi, B.; Wang, M.; Xiao, J.; Kolotelo, P.; McCarthy, D. A Low-Cost Radar-Based IoT Sensor for Noncontact Measurements of Water Surface Velocity and Depth. Sensors 2023, 23, 6314. [Google Scholar] [CrossRef] [PubMed]
- Semiconductors, V. Vishay Semiconductors High Speed Infrared Emitting Diode, 850 nm, SYMBOL Vishay Semiconductors. 1–5. Available online: https://www.vishay.com/docs/83160/vsly5850.pdf (accessed on 13 June 2024).
- McFalls, J.; Rounce, D.; Yi, Y.-J.; Cleveland, T.; Storey, B.; Murphy, H.; Barrett, M.; Dalton, D.; Lawler, D.; Morse, A. Performance Testing of Coagulants to Reduce Stormwater Runoff Turbidity; Texas Department of Transportation. Research and Technology Implementation Office: Houston, TX, USA, 2014. [Google Scholar]
- Trebitz, A.S.; Brazner, J.C.; Brady, V.J.; Axler, R.; Tanner, D.K. Turbidity tolerances of Great Lakes coastal wetland fishes. N. Am. J. Fish. Manag. 2007, 27, 619–633. [Google Scholar] [CrossRef]
- Shi, B.; Catsamas, S.; Kolotelo, P.; Wang, M.; Lintern, A.; Jovanovic, D.; Bach, P.M.; Deletic, A.; McCarthy, D.T. A low-cost water depth and electrical conductivity sensor for detecting inputs into urban stormwater networks. Sensors 2021, 21, 3056. [Google Scholar] [CrossRef] [PubMed]
- Schnurr, P.J.; Espie, G.S.; Allen, D.G. The effect of light direction and suspended cell concentrations on algal biofilm growth rates. Appl. Microbiol. Biotechnol. 2014, 98, 8553–8562. [Google Scholar] [CrossRef]
- B3D—PETG Filament—1.75 mm—Black—1kg Spool Details. Available online: https://www.b3d.com.au/DispProd.asp?CatID=19&SubCatID=138&ProdID=PETG175Black1 (accessed on 8 June 2023).
- Thermo Scientific Thermo Scientific Orion AQUAfast AQ4500 Turbidimeter. 2009. Available online: https://www.fondriest.com/pdf/thermo_aq4500_manual_09.pdf (accessed on 13 June 2024).
- Davies-Colley, R.J.; Smith, D.G. Turbidity suspeni) ed sediment, and water clarity: A review 1. JAWRA J. Am. Water Resour. Assoc. 2001, 37, 1085–1101. [Google Scholar] [CrossRef]
- Birch, G.F.; Matthai, C.; Fazeli, M.S.; Suh, J.Y. Efficiency of a constructed wetland in removing contaminants from stormwater. Wetlands 2004, 24, 459–466. [Google Scholar] [CrossRef]
- Garcia Chanc, L.M.; Van Brunt, S.C.; Majsztrik, J.C.; White, S.A. Short- and long-term dynamics of nutrient removal in floating treatment wetlands. Water Res. 2019, 159, 153–163. [Google Scholar] [CrossRef] [PubMed]
- Greenway, M. Wetlands and Ponds for Stormwater Treatment in Subtropical Australia: Their Effectiveness in Enhancing Biodiversity and Improving Water Quality? J. Contemp. Water Res. Educ. 2010, 146, 22–38. [Google Scholar] [CrossRef]
- Guerrero, J.; Mahmoud, A.; Alam, T.; Chowdhury, M.A.; Adetayo, A.; Ernest, A.; Jones, K.D. Water quality improvement and pollutant removal by two regional detention facilities with constructedwetlands in South Texas. Sustainability 2020, 12, 2844. [Google Scholar] [CrossRef]
- BoSL Board v0.4—BoSL Wiki. Available online: https://www.bosl.com.au/wiki/BoSL_Board_v0.4 (accessed on 10 April 2024).
- Mourad, M.; Bertrand-Krajewski, J.L. A method for automatic validation of long time series of data in urban hydrology. Water Sci. Technol. 2002, 45, 263–270. [Google Scholar] [CrossRef]
- Gama, J.; Sebastião, R.; Rodrigues, P.P.; Gama, J.; Sebastião, R.; Rodrigues, P.P. On evaluating stream learning algorithms. Mach Learn 2013, 90, 317–346. [Google Scholar] [CrossRef]
- Mouss, H.; Mouss, D.; Mouss, N.; Sefouhi, L. Test of Page-Hinckley, an approach for fault detection in an agro-alimentary production system. In Proceedings of the 2004 5th Asian Control Conference (IEEE Cat. No.04EX904), Melbourne, Australia, 20–23 July 2004; pp. 815–818. [Google Scholar] [CrossRef]
- Sedgwick, P. Pearson’s correlation coefficient. BMJ 2012, 345, e4483. [Google Scholar] [CrossRef]
- Bridge, P.D.; Sawilowsky, S.S. Increasing Physicians’ Awareness of the Impact of Statistics on Research Outcomes: Comparative Power of the t-test and Wilcoxon Rank-Sum Test in Small Samples Applied Research. J. Clin. Epidemiol. 1999, 52, 229–235. [Google Scholar] [CrossRef]
- Solano-Rivera, V.; Geris, J.; Granados-Bolaños, S.; Brenes-Cambronero, L.; Artavia-Rodríguez, G.; Sánchez-Murillo, R.; Birkel, C. Exploring extreme rainfall impacts on flow and turbidity dynamics in a steep, pristine and tropical volcanic catchment. Catena 2019, 182, 104118. [Google Scholar] [CrossRef]
- Bever, A.J.; MacWilliams, M.L.; Fullerton, D.K. Influence of an observed decadal decline in wind speed on turbidity in the San Francisco Estuary. Estuaries Coasts 2018, 41, 1943–1967. [Google Scholar] [CrossRef]
- Schnurr, P.J.; Allen, D.G. Factors affecting algae biofilm growth and lipid production: A review. Renew. Sustain. Energy Rev. 2015, 52, 418–429. [Google Scholar] [CrossRef]
- Carroll, M.; Chigounis, D.; Gilbert, S.; Gundersen, K.; Hayashi, K.; Janzen, C.; Johengen, T.; Koles, T.; McKissack, T.; McIntyre, M. Performance Verification Statement for the YSI 6600 EDS Sonde and 6136 Turbidity Sensor. 2006. Available online: https://repository.oceanbestpractices.org/bitstream/handle/11329/801/32.pdf?sequence=1 (accessed on 13 June 2024).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parts | Cost in USD |
|---|---|
| LED | 1.20 |
| Phototransistor | 3.20 |
| PCB | 15.00 |
| Potting compound | 1.00 |
| Epoxy cover | 0.10 |
| 3D-printing house | 3.00 |
| Price in total | 23.50 |
| Mode | Time | Current | Battery Charge Use |
|---|---|---|---|
| Working Mode with active LED | 1 s | 88 mA | 0.024 mAh |
| Working Mode with inactive LED | 1 s | 4 mA | 0.0011 mAh |
| Sleeping Mode | 58 s | <0.1 µA | <0.0001 µAh |
| Yearly Power use | 13.43 Ah |
| Sensor | Criterion 1: If in Water (%) | Criterion 2: Missing Data (%) | Criterion 3: Beyond Detecting Range (%) | Criterion 4: Continuous Trend Data (%) | Criterion 5: Dirt on Prob (%) | Criterion 6: Long Time after Maintenance (%) | Criterion 7: Erratic Gradients Values (%) | Total (%) |
|---|---|---|---|---|---|---|---|---|
| Inlet low-cost | 0.0 | 3.9 | 20.9 | 8.5 | 0.0 | 20.8 | 9.6 | 63.6 |
| Inlet GreenSpan | 0.0 | 7.0 | 12.3 | 0.0 | 0.0 | 26.1 | 10.8 | 56.2 |
| Outlet low-cost | 0.0 | 5.8 | 3.4 | 3.6 | 0.0 | 32.3 | 12.8 | 57.8 |
| Outlet GreenSpan | 0.0 | 0.0 | 1.5 | 0.0 | 0.0 | 39.2 | 11.4 | 52.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, M.; Shi, B.; Catsamas, S.; Kolotelo, P.; McCarthy, D. A Compact, Low-Cost, and Low-Power Turbidity Sensor for Continuous In Situ Stormwater Monitoring. Sensors 2024, 24, 3926. https://doi.org/10.3390/s24123926
Wang M, Shi B, Catsamas S, Kolotelo P, McCarthy D. A Compact, Low-Cost, and Low-Power Turbidity Sensor for Continuous In Situ Stormwater Monitoring. Sensors. 2024; 24(12):3926. https://doi.org/10.3390/s24123926
Chicago/Turabian StyleWang, Miao, Baiqian Shi, Stephen Catsamas, Peter Kolotelo, and David McCarthy. 2024. "A Compact, Low-Cost, and Low-Power Turbidity Sensor for Continuous In Situ Stormwater Monitoring" Sensors 24, no. 12: 3926. https://doi.org/10.3390/s24123926