
High Power Pulsed LED Driver for Vibration Measurements

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- -
- Short-time light pulses can be produced to avoid blurred images
- -
- High-intensity illumination can be provided by using high-power devices and collimating optics
- -
- Cameras synchronization can be relaxed since they will acquire data only when the light pulse is active.
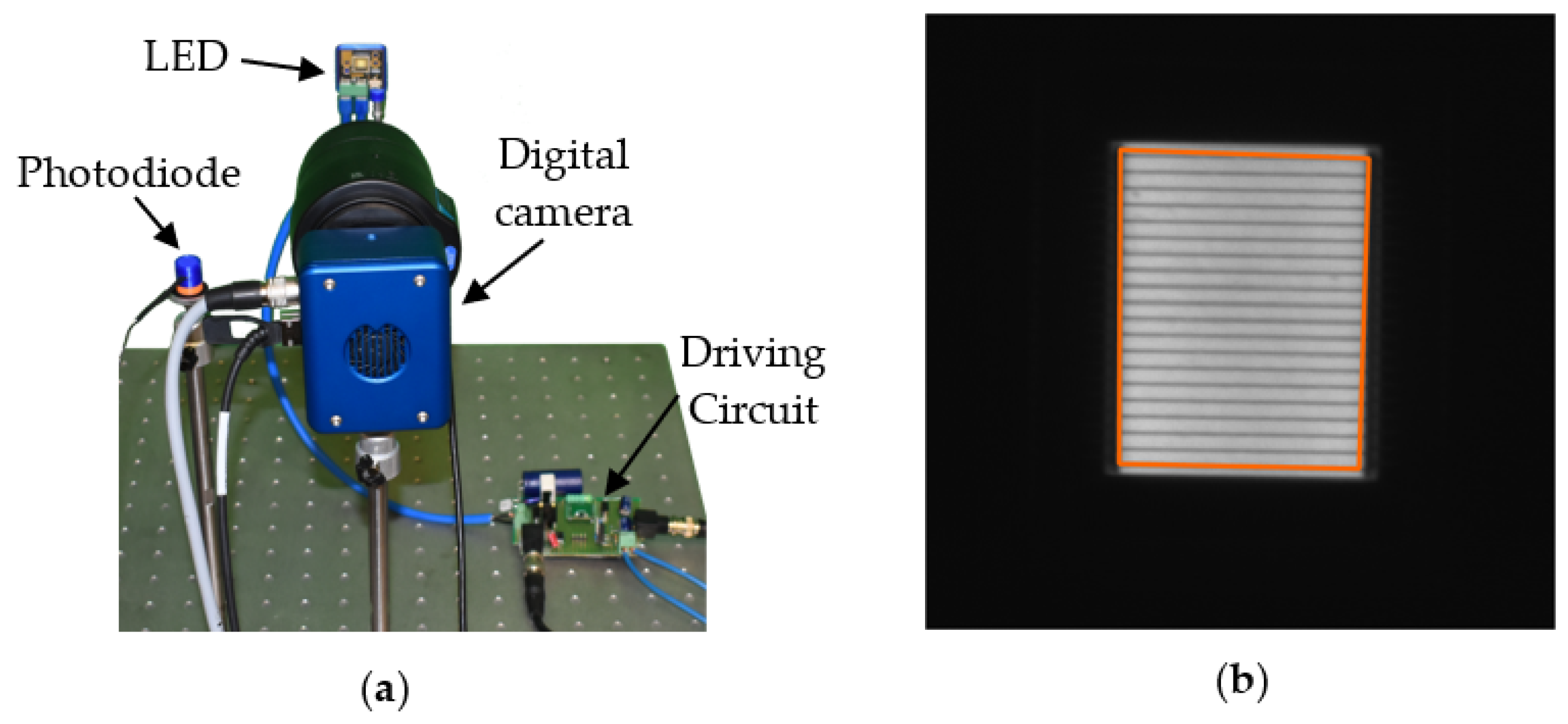
2. Materials and Methods
3. Experimental Results
3.1. Performance Estimation Criteria
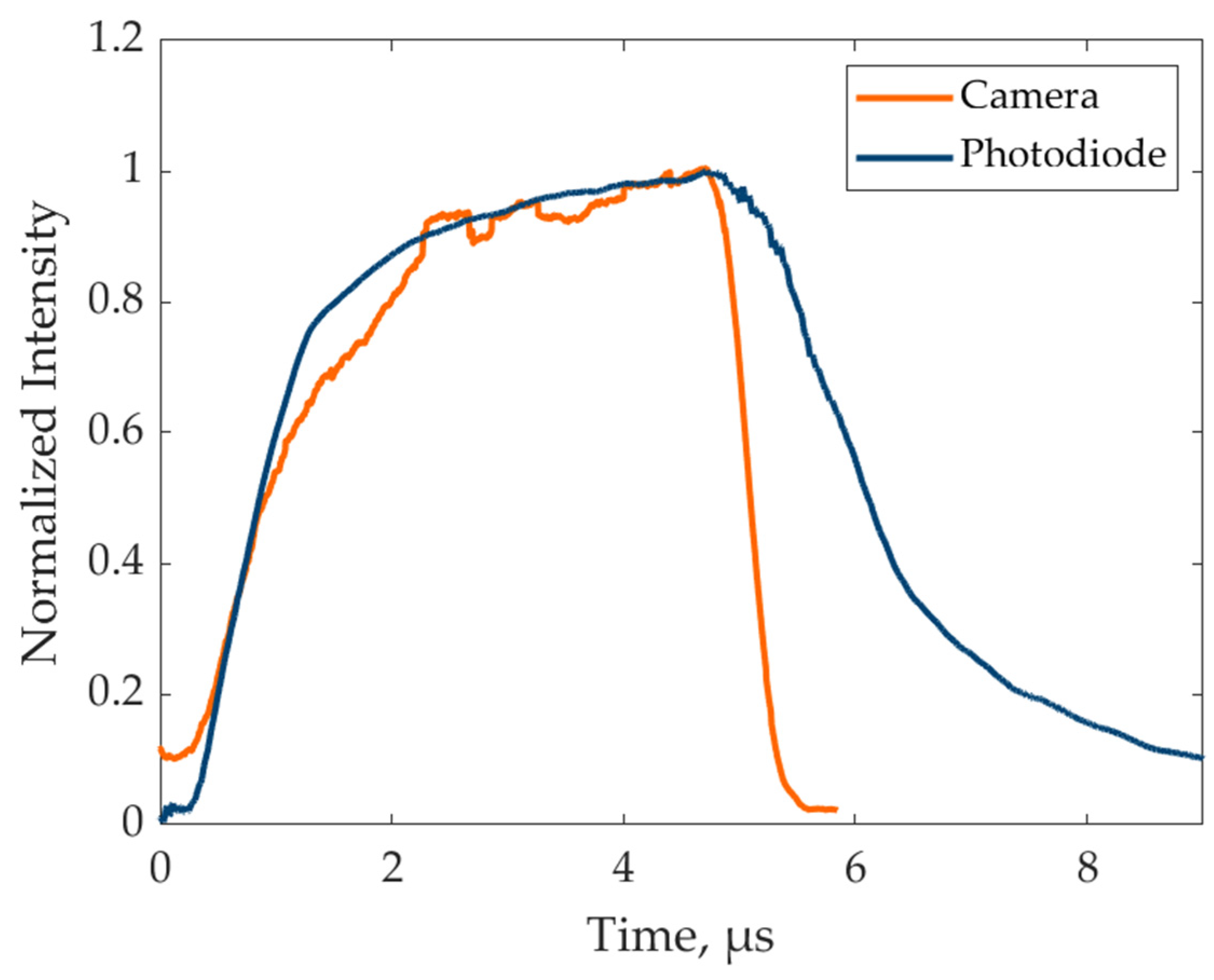
3.2. Direct Photodiode Acquisition
3.3. Indirect Camera Acquisition
3.4. Experimental Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Neri, P. Augmented-Resolution Digital Image Correlation Algorithm for Vibration Measurements. Measurement 2024, 231, 114565. [Google Scholar] [CrossRef]
- Dorn, C.; Yang, Y. Automated Modal Identification by Quantification of High-Spatial-Resolution Response Measurements. Mech. Syst. Signal Process. 2023, 186, 109816. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, Z.; Fang, Z.; Su, Y.; Zhang, Q. Rotating Vibration Measurement Using 3D Digital Image Correlation. Exp. Mech. 2023, 63, 565–579. [Google Scholar] [CrossRef]
- Li, S.; Azad, F.A.; Yang, Y. Super-Sensitivity Full-Field Measurement of Structural Vibration with an Adaptive Incoherent Optical Method. Mech. Syst. Signal Process. 2023, 202, 110666. [Google Scholar] [CrossRef]
- Neri, P. Frequency-Band down-Sampled Stereo-DIC: Beyond the Limitation of Single Frequency Excitation. Mech. Syst. Signal Process. 2022, 172, 108980. [Google Scholar] [CrossRef]
- Yu, L.P.; Pan, B. Full-Frame, High-Speed 3D Shape and Deformation Measurements Using Stereo-Digital Image Correlation and a Single Color High-Speed Camera. Opt. Lasers Eng. 2017, 95, 17–25. [Google Scholar] [CrossRef]
- Javh, J.; Slavič, J.; Boltežar, M. High Frequency Modal Identification on Noisy High-Speed Camera Data. Mech. Syst. Signal Process. 2018, 98, 344–351. [Google Scholar] [CrossRef]
- Lin, R.; Sheng, Z.; Chen, B.; Gao, Z.; Fu, Y. Modal Shapes Measurements of a Rotating Disc Using Stroboscopic 3D Digital Image Correlation and Down-Sampling Strategy. In Proceedings of the International Conference on Optical and Photonic Engineering (icOPEN 2022), Online, China, 24–27 November 2022. [Google Scholar]
- Kato, Y.; Watahiki, S. Vibration Mode Identification Method for Structures Using Image Correlation and Compressed Sensing. Mech. Syst. Signal Process. 2023, 199, 110495. [Google Scholar] [CrossRef]
- Nasution, A.M.T.; Ibrahim, I.A.; Asani, P.A.A.; Anggara, Y. Performance Evaluation of the Webcam-Based Contactless Respiratory Rate Monitoring System. Instrum. Mes. Metrol. 2022, 21, 217–223. [Google Scholar] [CrossRef]
- Molina-Viedma, Á.J.; Felipe-Sesé, L.; Pastor-Cintas, M.; López-Alba, E.; Díaz, F.A. Evaluation of Modal Identification under Base Motion Excitation Using Vision Techniques. Mech. Syst. Signal Process. 2022, 179, 109405. [Google Scholar] [CrossRef]
- Zhou, S.; Liao, Z.; Sun, K.; Zhang, Z.; Qian, Y.; Liu, P.; Du, P.; Jiang, J.; Lv, Z.; Qi, S. High-Power AlGaN-Based Ultrathin Tunneling Junction Deep Ultraviolet Light-Emitting Diodes. Laser Photonics Rev. 2024, 18, 2300464. [Google Scholar] [CrossRef]
- Zhou, S.; Wan, Z.; Lei, Y.; Tang, B.; Tao, G.; Du, P.; Zhao, X. InGaN Quantum Well with Gradually Varying Indium Content for High-Efficiency GaN-Based Green Light-Emitting Diodes. Opt. Lett. 2022, 47, 1291–1294. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Zhao, X.; Du, P.; Zhang, Z.; Liu, X.; Liu, S.; Guo, L.J. Application of Patterned Sapphire Substrate for III-Nitride Light-Emitting Diodes. Nanoscale 2022, 14, 4887–4907. [Google Scholar] [CrossRef] [PubMed]
- Rammohan, A.; Ramesh Kumar, C.; Chandramohan, V.P. Experimental Analysis on Estimating Junction Temperature and Service Life of High Power LED Array. Microelectron. Reliab. 2021, 120, 114121. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, J.; Zhao, H.; Hong, Z.; Wang, S.; Li, F.; Lu, X. Improved LED Junction Temperature Measurement System Based on LabVIEW. In Proceedings of the 9th International Symposium on Sensors, Mechatronics, and Automation (ISSMAS 2023), Nanjing, China, 11–13 August 2023. [Google Scholar]
- Ušakovs, I.; Ivanovskis, L. Advanced Loop Heat Pipe Application for Cooling High Power LED Lights. Case Stud. Therm. Eng. 2024, 57, 104320. [Google Scholar] [CrossRef]
- Basavaraja, R.; Anitha, M.; Pradeep, M. Hybrid Low Frequency Switching Linear LED Driver for Controlling Dimming Range. Int. J. Eng. Adv. Technol. 2019, 8, 588–592. [Google Scholar]
- Willert, C.; Stasicki, B.; Klinner, J.; Moessner, S. Pulsed Operation of High-Power Light Emitting Diodes for Imaging Flow Velocimetry. Meas. Sci. Technol. 2010, 21, 075402. [Google Scholar] [CrossRef]
- Buchmann, N.A.; Willert, C.; Soria, J. Pulsed, High-Power LED Volume Illumination for Tomographic Particle Image Velocimetry. In Proceedings of the 17th Australasian Fluid Mechanics Conference 2010, Auckland, New Zealand, 5–9 December 2010. [Google Scholar]
- Tuljak, M.; Lajevec, D.; Štanc, R.; Zemljič Jokhadar, Š.; Derganc, J. Low-Cost Programable Stroboscopic Illumination with Sub-Microsecond Pulses for High-Throughput Microfluidic Applications. HardwareX 2022, 12, e00367. [Google Scholar] [CrossRef]
- Sousa, P.J.; Carneiro, F.; Viriato Ramos, N.; Tavares, P.J.; Moreira, P.M.G.P. Development of LED-Based Illumination System for High-Speed Digital Image Correlation. Procedia Struct. Integr. 2019, 17, 828–834. [Google Scholar] [CrossRef]
- Sousa, P.J.; Barros, F.; Tavares, P.J.; Moreira, P.M.G.P. Experimental and Numerical Analysis of Deformation in a Rotating RC Helicopter Blade. Int. J. Turbomach. Propuls. Power 2020, 5, 13. [Google Scholar] [CrossRef]
- Luminus, Inc. Luminus PT-121-TE. Available online: https://download.luminus.com/datasheets/Luminus_PT-121_Datasheet.pdf (accessed on 5 June 2024).
- Barone, S.; Neri, P.; Paoli, A.; Razionale, A.V. Low-Frame-Rate Single Camera System for 3D Full-Field High-Frequency Vibration Measurements. Mech. Syst. Signal Process. 2019, 123, 143–152. [Google Scholar] [CrossRef]







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neri, P.; Ciarpi, G.; Neri, B. High Power Pulsed LED Driver for Vibration Measurements. Sensors 2024, 24, 4103. https://doi.org/10.3390/s24134103
Neri P, Ciarpi G, Neri B. High Power Pulsed LED Driver for Vibration Measurements. Sensors. 2024; 24(13):4103. https://doi.org/10.3390/s24134103
Chicago/Turabian StyleNeri, Paolo, Gabriele Ciarpi, and Bruno Neri. 2024. "High Power Pulsed LED Driver for Vibration Measurements" Sensors 24, no. 13: 4103. https://doi.org/10.3390/s24134103