
Drone-Borne Magnetic Gradiometry in Archaeological Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
Drone-Borne and Ground Magnetic Surveys’ Design
3. Results
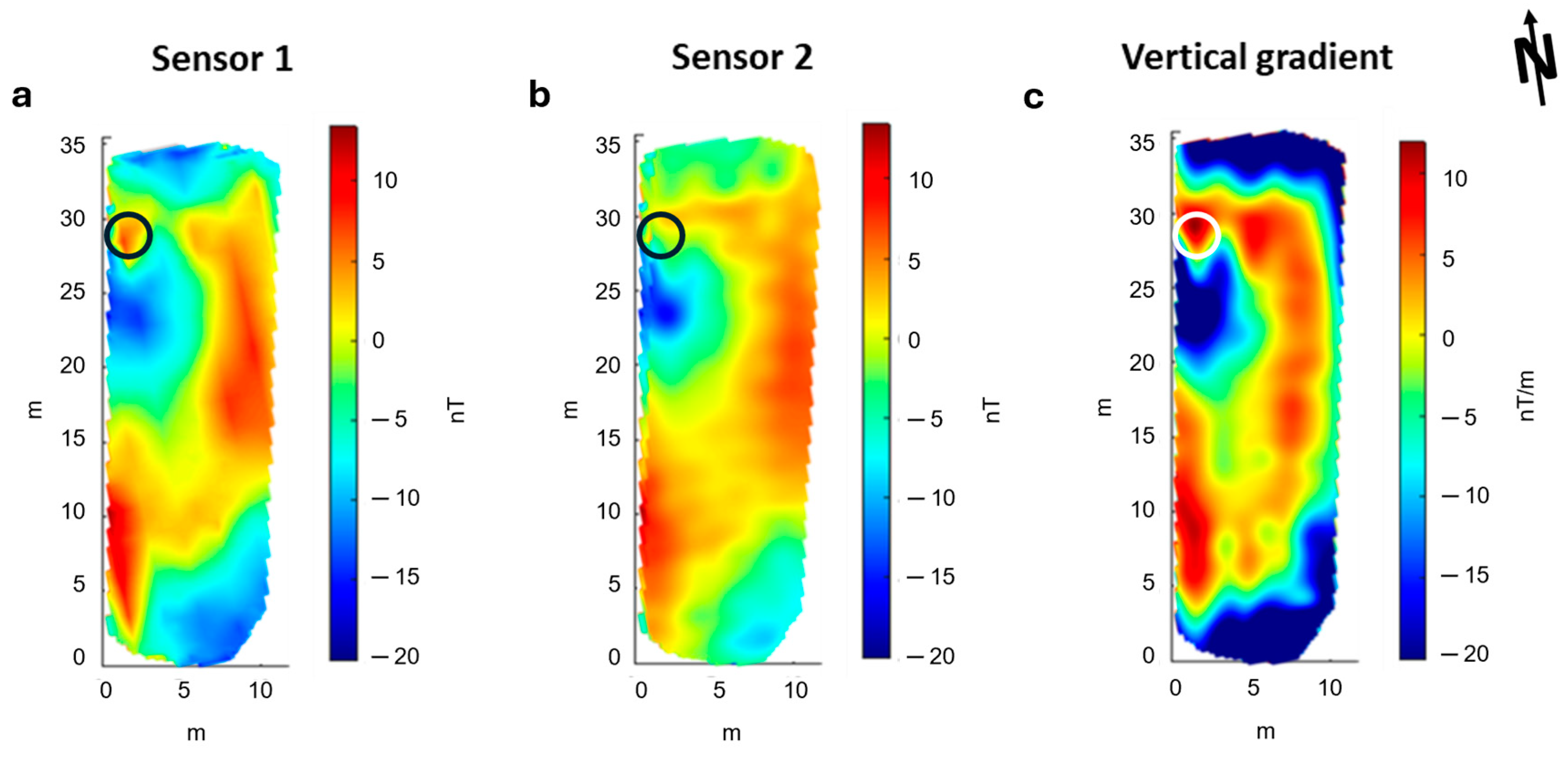
3.1. UAV Magnetic Survey
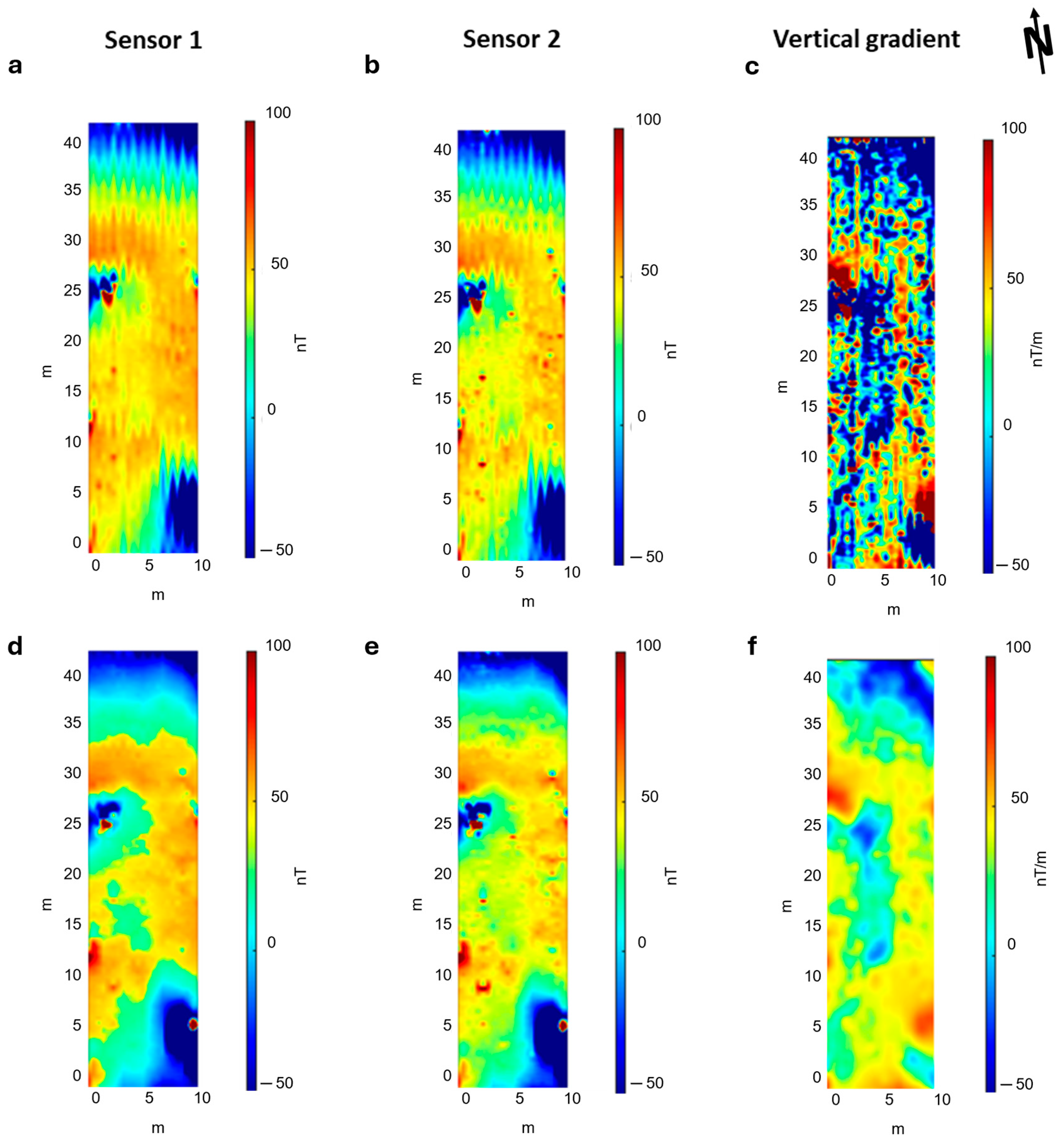
3.2. Ground Magnetic Survey
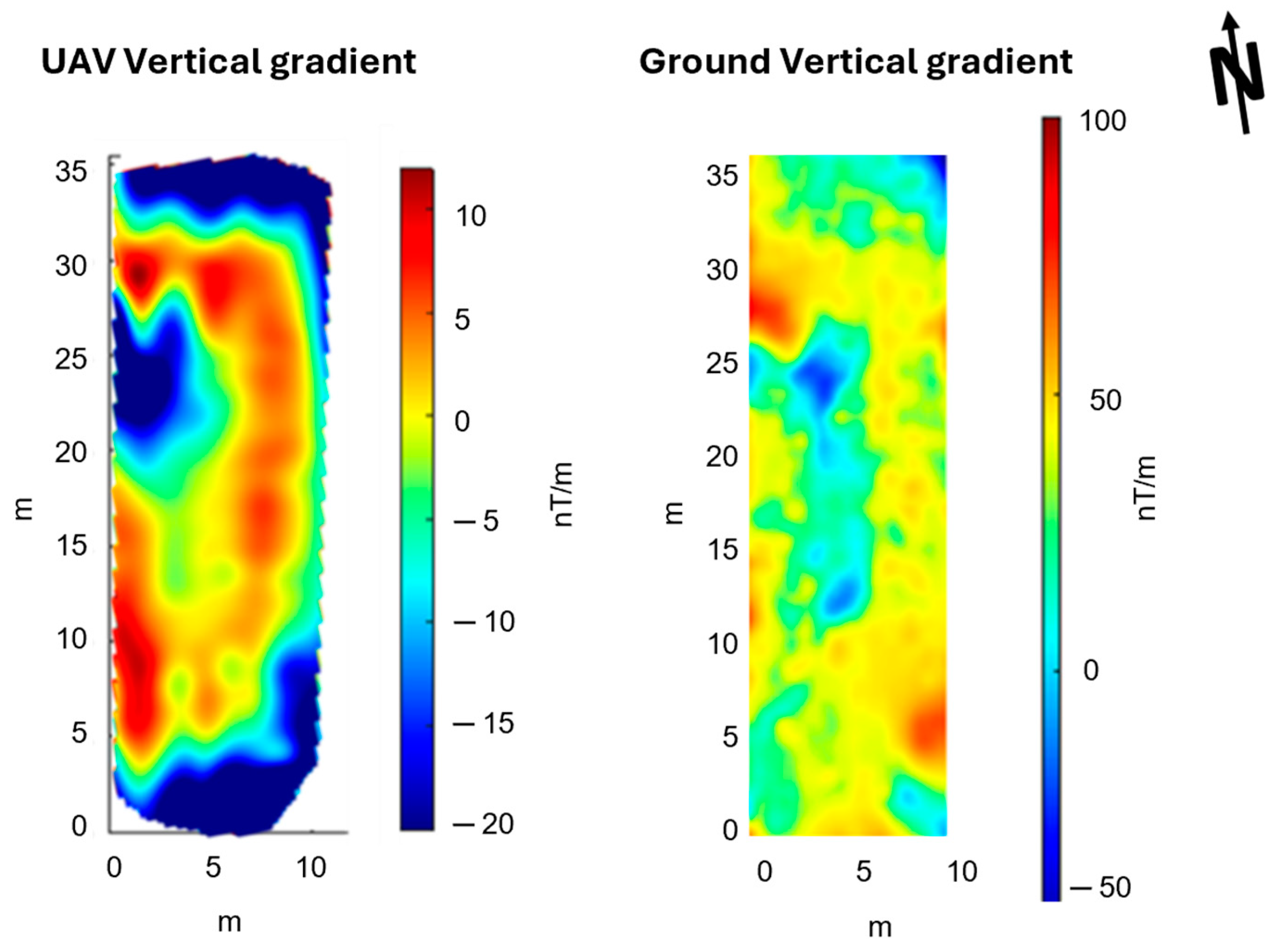
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carrara, E.; Carrozzo, M.T.; Fedi, M.; Florio, G.; Negri, S.; Paoletti, V.; Paolillo, G.; Quarta, T.; Rapolla, A.; Roberti, N. Resistivity and radar surveys at the archaeological site of Ercolano. J. Environ. Eng. Geophys. 2001, 6, 123–132. [Google Scholar] [CrossRef]
- Pozdnyakova, O.A.; Balkov, E.V.; Dyadkov, P.G.; Marchenko, Z.V.; Grishin, A.E.; Evmenov, N.D. Integrative geophysical studies at the Novaya Kurya-1 cemetery in the Kulunda steppe. Archaeol. Ethnol. Anthropol. Eurasia 2022, 49, 69–79. [Google Scholar] [CrossRef]
- Bianco, L.; La Manna, M.; Russo, V.; Fedi, M. Magnetic and GPR Data Modelling via Multiscale Methods in San Pietro in Crapolla Abbey, Massa Lubrense (Naples). Archaeol. Prospect. 2024, 31, 139–147. [Google Scholar] [CrossRef]
- Parvar, K.; Braun, A.; Layton-Matthews, D.; Burns, M. UAV magnetometry for chromite exploration in the Samail ophiolite sequence, Oman. J. Unmanned Veh. Syst. 2018, 6, 57–69. [Google Scholar] [CrossRef]
- Malehmir, A.; Dynesius, L.; Paulusson, K.; Paulusson, A.; Johansson, H.; Bastani, M.; Wedmark, M.; Marsden, P. The potential of rotary-wing UAV-based magnetic surveys for mineral exploration: A case study from central Sweden. Lead. Edge 2017, 36, 552–557. [Google Scholar] [CrossRef]
- Cunningham, M.; Samson, C.; Wood, A.; Cook, I. Aeromagnetic surveying with a rotary-wing unmanned aircraft system: A case study from a zinc deposit in Nash Creek, New Brunswick, Canada. Pure Appl. Geophys. 2018, 175, 3145–3158. [Google Scholar] [CrossRef]
- Parshin, A.V.; Morozov, V.A.; Blinov, A.V.; Kosterev, A.N.; Budyak, A.E. Low-altitude geophysical magnetic prospecting based on multirotor UAV as a promising replacement for traditional ground survey. Geo-Spat. Inf. Sci. 2018, 21, 67–74. [Google Scholar] [CrossRef]
- Walter, C.; Braun, A.; Fotopoulos, G. High-resolution unmanned aerial vehicle aeromagnetic surveys for mineral exploration targets. Geophys. Prospect. 2020, 68, 334–349. [Google Scholar] [CrossRef]
- Shahsavani, H. An aeromagnetic survey carried out using a rotary-wing UAV equipped with a low-cost magneto-inductive sensor. Int. J. Remote Sens. 2021, 42, 8805–8818. [Google Scholar] [CrossRef]
- Kim, B.; Jeong, S.; Bang, E.; Shin, S.; Cho, S. Investigation of iron ore mineral distribution using aero-magnetic exploration techniques: Case study at Pocheon, Korea. Minerals 2021, 11, 665. [Google Scholar] [CrossRef]
- Mu, Y.; Zhang, X.; Xie, W.; Zheng, Y. Automatic detection of near-surface targets for unmanned aerial vehicle (UAV) magnetic survey. Remote Sens. 2020, 12, 452. [Google Scholar] [CrossRef]
- Nikulin, A.; de Smet, T.S. A UAV-based magnetic survey method to detect and identify orphaned oil and gas wells. Lead. Edge 2019, 38, 447–452. [Google Scholar] [CrossRef]
- de Smet, T.S.; Nikulin, A.; Romanzo, N.; Graber, N.; Dietrich, C.; Puliaiev, A. Successful application of drone-based aeromagnetic surveys to locate legacy oil and gas wells in Cattaraugus county, New York. J. Appl. Geophys. 2021, 186, 104250. [Google Scholar] [CrossRef]
- Accomando, F.; Vitale, A.; Bonfante, A.; Buonanno, M.; Florio, G. Performance of two different flight configurations for drone-borne magnetic data. Sensors 2021, 21, 5736. [Google Scholar] [CrossRef]
- Maire, P.L.; Bertrand, L.; Munschy, M.; Diraison, M.; Géraud, Y. Aerial magnetic mapping with a UAV and a fluxgate magnetometer: A new method for rapid mapping and upscaling from the field to regional scale. Geophys. Prospect. 2020, 68, 2307–2319. [Google Scholar] [CrossRef]
- Accomando, F.; Bonfante, A.; Buonanno, M.; Natale, J.; Vitale, S.; Florio, G. The drone-borne magnetic survey as the optimal strategy for high-resolution investigations in presence of extremely rough terrains: The case study of the Taverna San Felice quarry dike. J. Appl. Geophys. 2023, 217, 105186. [Google Scholar] [CrossRef]
- Gailler, L.; Labazuy, P.; Régis, E.; Bontemps, M.; Souriot, T.; Bacques, G.; Carton, B. Validation of a new UAV magnetic prospecting tool for volcano monitoring and geohazard assessment. Remote Sens. 2021, 13, 894. [Google Scholar] [CrossRef]
- Schmidt, V.; Becken, M.; Schmalzl, J. A UAV-borne magnetic survey for archaeological prospection of a Celtic burial site. First Break. 2020, 38, 61–66. [Google Scholar] [CrossRef]
- Luoma, S.; Zhou, X. Construction of a fluxgate magnetic gradiometer for integration with an unmanned aircraft system. Remote Sens. 2020, 12, 2551. [Google Scholar] [CrossRef]
- Stele, A.; Kaub, L.; Linck, R.; Schikorra, M.; Fassbinder, J.W. Drone-based magnetometer prospection for archaeology. J. Archaeol. Sci. 2023, 158, 105818. [Google Scholar] [CrossRef]
- Pisciotta, A.; Vitale, G.; Scudero, S.; Martorana, R.; Capizzi, P.; D’Alessandro, A. A lightweight prototype of a magnetometric system for unmanned aerial vehicles. Sensors 2020, 21, 4691. [Google Scholar] [CrossRef] [PubMed]
- Slack, H.; Lynch, V.M.; Langan, L. The geomagnetic gradiometer. Geophysics 1967, 32, 877–892. [Google Scholar] [CrossRef]
- Florio, G.; Cella, F.; Speranza, L.; Castaldo, R.; Pierobon Benoit, R.; Palermo, R. Multiscale Techniques for 3D Imaging of Magnetic Data for Archaeo-Geophysical Investigations in the Middle East: The Case of Tell Barri (Syria). Archaeol. Prospect. 2019, 26, 379–395. [Google Scholar] [CrossRef]
- Paoletti, V.; Fedi, M.; Florio, G.; Rapolla, A. Localized Cultural Denoising of High-Resolution Aeromagnetic Data. Geophys. Prospect. 2007, 55, 421–432. [Google Scholar] [CrossRef]
- Blakely, R.J. Potential Theory in Gravity and Magnetic Applications; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Schmidt, V.; Coolen, J.; Fritsch, T.; Klingen, S. Towards drone-based magnetometer measurements for archaeological prospection in challenging terrain. Drone Syst. Appl. 2024, 12, 1–15. [Google Scholar] [CrossRef]
- Sassu, R. Tra polis e chora. Santuari extraurbani e aree di culto rurali nel comprensorio metapontino. In Il Ruolo del Culto Nelle Comunità Dell’italia Antica tra IV e I. sec. a.C. Strutture, Funzioni e Interazioni Culturali; Lippolis, E., Sassu, R., Eds.; Thiasos Monografie: Roma, Italy, 2018; Volume 10. (In Italian) [Google Scholar]
- Mertens, D. L’architettura in Metaponto. In Proceedings of the Atti del Tredicesimo Convegno di Studi Sulla Magna Grecia, Taranto, Italy, 14–19 October 1973; pp. 187–235. (In Italian). [Google Scholar]
- Hollinshead, M.B. “Adyton,” “Opisthodomos,” and the Inner Room of the Greek Temple, Hesperia. J. Am. Sch. Class. Stud. Athens 1999, 68, 189–218. [Google Scholar] [CrossRef]
- Cancelliere, S.; Lazzarini, L. Le calcareniti mediterranee, con particolare riferimento a quelle della Magna Grecia, e un esempio di studio: Le Tavole Palatine The Mediterranean Calcarenites, with particular reference to Magna Graecia, a case study: The Tavole Palatine. Segni Immagin. Stor. Cent. Costieri Euro-Mediterr. 2019, 4, 27. [Google Scholar]
- Breiner, S. Applications Manual for Portable Magnetometers; Geometrics: Sunnyvale, CA, USA, 1973; Volume 395. [Google Scholar]
- Walter, C.; Braun, A.; Fotopoulos, G. Impact of 3-D attitude variations of a UAV magnetometry system on magnetic data quality. Geophys. Prospect. 2019, 67, 465–479. [Google Scholar] [CrossRef]
- Parvar, K. Development and Evaluation of Unmanned Aerial Vehicle (UAV) Magnetometry Systems. Master’s Thesis, Department of Geological Sciences and Geological Engineering, Queen’s University, Kingston, ON, Canada, 2016; pp. 1–141. [Google Scholar]
- Walter, C.; Braun, A.; Fotopoulos, G. Characterizing electromagnetic interference signals for unmanned aerial vehicle geophysical surveys. Geophysics 2021, 86, J21–J32. [Google Scholar] [CrossRef]
- Kaub, L.; Keller, G.; Bouligand, C.; Glen, J.M. Magnetic surveys with Unmanned Aerial Systems: Software for assessing and comparing the accuracy of different sensor systems, suspension designs and compensation methods. Geochem. Geophys. Geosystems 2021, 22, e2021GC009745. [Google Scholar] [CrossRef]
- Olhede, S.C.; Walden, A.T. Generalized morse wavelets. IEEE Trans. Signal Process. 2022, 50, 2661–2670. [Google Scholar] [CrossRef]
- Fedi, M.; Cella, F.; Florio, G.; La Manna, M.; Paoletti, V. Geomagnetometry for Archaeology. In Sensing the Past—From Artifact to Historical Site; Masini, N., Soldovieri, F., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 203–230. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Accomando, F.; Florio, G. Drone-Borne Magnetic Gradiometry in Archaeological Applications. Sensors 2024, 24, 4270. https://doi.org/10.3390/s24134270
Accomando F, Florio G. Drone-Borne Magnetic Gradiometry in Archaeological Applications. Sensors. 2024; 24(13):4270. https://doi.org/10.3390/s24134270
Chicago/Turabian StyleAccomando, Filippo, and Giovanni Florio. 2024. "Drone-Borne Magnetic Gradiometry in Archaeological Applications" Sensors 24, no. 13: 4270. https://doi.org/10.3390/s24134270