

Dual-Slope Path Loss Model for Integrating Vehicular Sensing Applications in Urban and Suburban Environments




Abstract
1. Introduction
2. Methodology
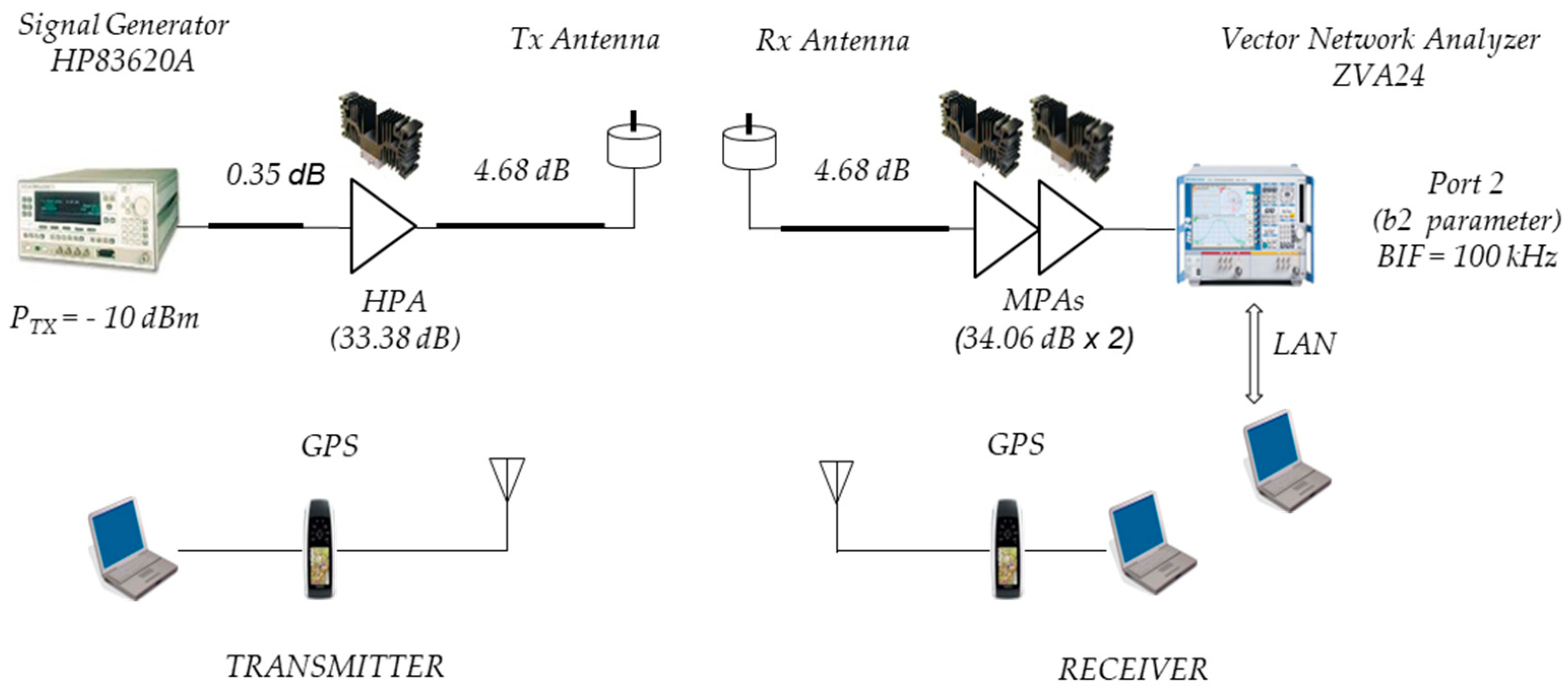
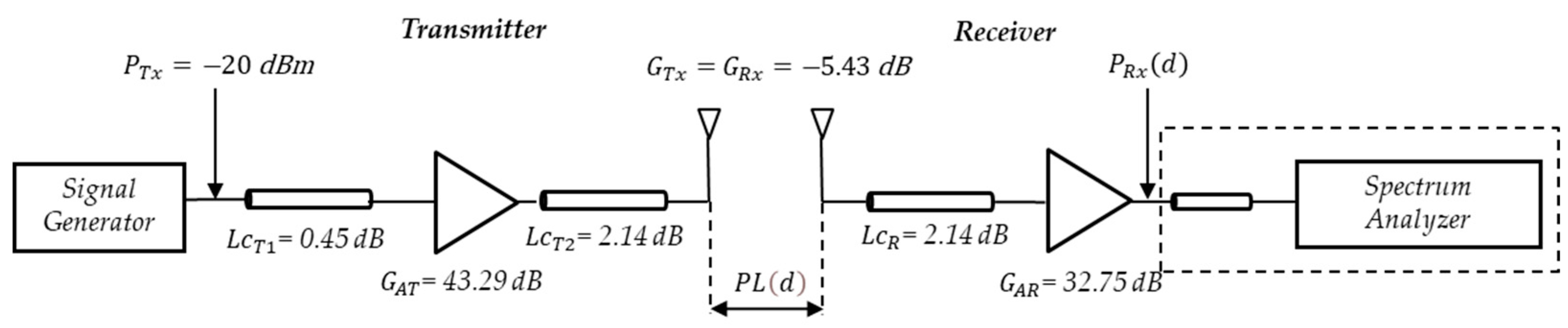
2.1. Measurement System
2.2. Scenarios
3. Link Budget and Dual-Slope Path Loss Measurement Results
3.1. Link Budget at 5.9 GHz and at 700 MHz
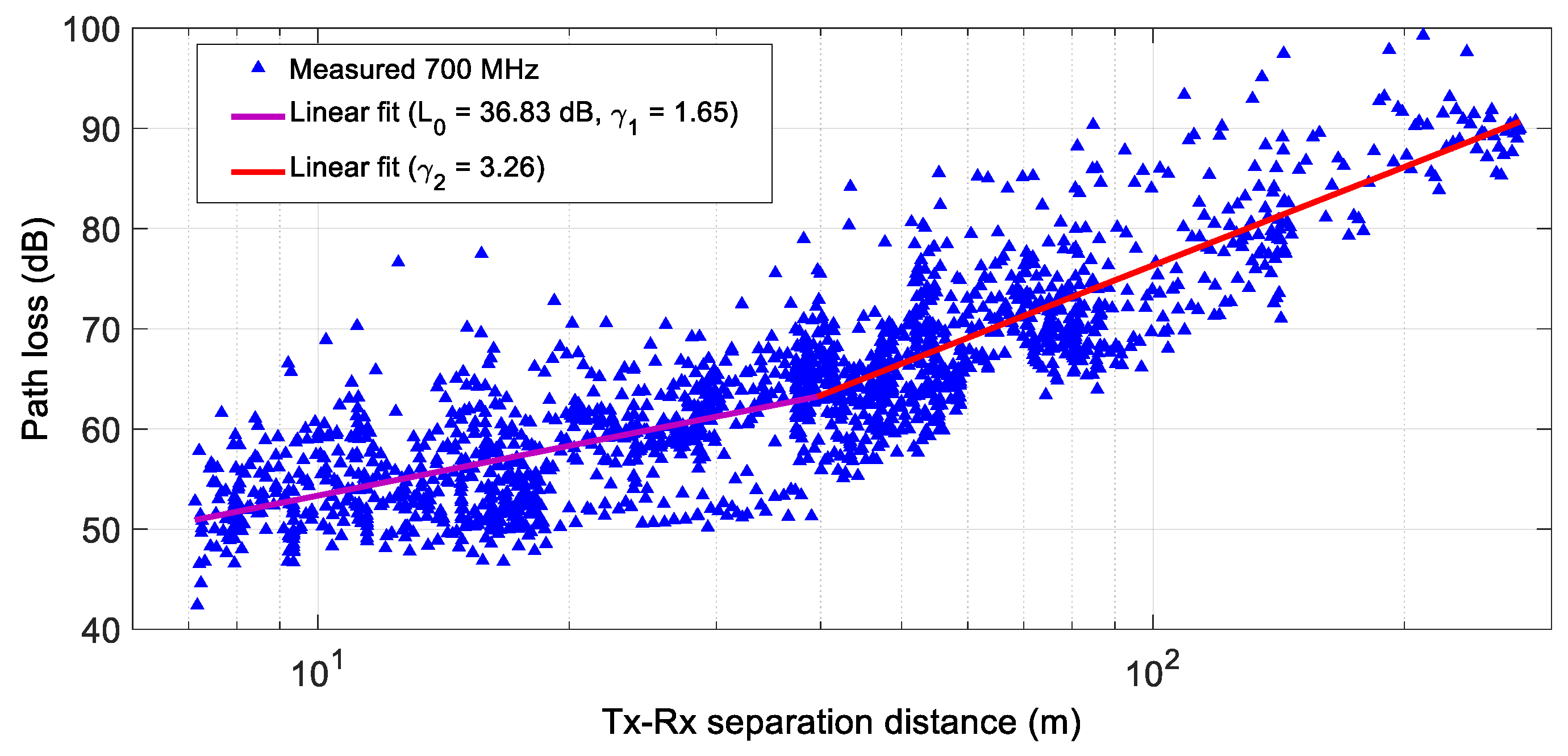
3.2. Dual-Slope Path Loss Model Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guo, R.; Vallati, M.; Wang, Y.; Zhang, H.; Chen, Y.; Wang, F.-Y. Sustainability Opportunities and Ethical Challenges of AI-Enabled Connected Autonomous Vehicles Routing in Urban Areas. IEEE Trans. Intell. Veh. 2023, 9, 1–4. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Cheng, N.; Zhou, H.; Xu, W.; Li, M.; Shen, X. Characterizing urban vehicle-to-vehicle communications for reliable safety applications. IEEE Trans. Intell. Transp. Syst. 2019, 21, 2586–2602. [Google Scholar] [CrossRef]
- Lu, R.; Zhang, L.; Ni, J.; Fang, Y. 5G vehicle-to-everything services: Gearing up for security and privacy. Proc. IEEE 2019, 108, 373–389. [Google Scholar] [CrossRef]
- Wei, Z.; Mao, B.; Guo, H.; Xun, Y.; Liu, J.; Kato, N. An Intelligent Path Loss Prediction Approach based on Integrated Sensing and Communications for Future Vehicular Networks. IEEE Open J. Comput. Soc. 2024, 5, 170–180. [Google Scholar] [CrossRef]
- ITU. M.2150: Detailed Specifications of the Terrestrial Radio Interfaces of International Mobile Telecommunications-2020 (IMT-2020). Available online: https://www.itu.int/rec/R-REC-M.2150/en (accessed on 6 June 2023).
- Muñoz, J.; Mancipe, D.; Fernández, H.; Rubio, L.; Peñarrocha, V.M.R.; Reig, J. Path Loss Characterization in an Outdoor Corridor Environment for IoT-5G in a Smart Campus University at 850 MHz and 3.5 GHz Frequency Bands. Sensors 2023, 23, 9237. [Google Scholar] [CrossRef] [PubMed]
- Nawaz, M.; Tang, J.K.-T.; Bibi, K.; Xiao, S.; Ho, H.-P.; Yuan, W. Robust Cognitive Capability in Autonomous Driving Using Sensor Fusion Techniques: A Survey. IEEE Trans. Intell. Transp. Syst. 2023, 25, 3228–3243. [Google Scholar] [CrossRef]
- Liu, S. Innovations on the Vehicle-to-Everything Infrastructure. In Engineering Autonomous Vehicles and Robots: The DragonFly Modular-Based Approach; Wiley-IEEE Press: Piscataway, NJ, USA, 2019. [Google Scholar]
- Brambilla, M.; Nicoli, M.; Soatti, G.; Deflorio, F. Augmenting vehicle localization by cooperative sensing of the driving environment: Insight on data association in urban traffic scenarios. IEEE Trans. Intell. Transp. Syst. 2019, 21, 1646–1663. [Google Scholar] [CrossRef]
- Magsinoy, E.R.; Von Galang, G.D.; He, M.L.X.; Inomata, R.C. Cooperative vehicles for monitoring urban roads based on behavioral rules. In Proceedings of the 2019 IEEE 9th Symposium on Computer Applications & Industrial Electronics (ISCAIE), Kota Kinabalu, Malaysia, 27–28 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 103–107. [Google Scholar]
- Federal Communications Commission. Dedicated Short Range Communications (DSRC) Service. Available online: https://www.fcc.gov/wireless/bureau-divisions/mobility-division/dedicated-short-range-communications-dsrc-service (accessed on 17 May 2024).
- ASTM E2213-03; ASTM E2213-03 Standard Specification for Telecommunications and Information Exchange between Roadside and Vehicle Systems—5 GHz Band Dedicated Short Range Communications (DSRC) Medium Access Control (MAC) and Physical Layer (PHY) Specifications. Available online: https://www.standards.its.dot.gov/Standard/390 (accessed on 9 May 2024).
- Mecklenbrauker, C.F.; Molisch, A.F.; Karedal, J.; Tufvesson, F.; Paier, A.; Bernado, L.; Zemen, T.; Klemp, O.; Czink, N. Vehicular Channel Characterization and Its Implications for Wireless System Design and Performance. Proc. IEEE 2011, 99, 1189–1212. (In English) [Google Scholar] [CrossRef]
- Karedal, J.; Czink, N.; Paier, A.; Tufvesson, F.; Molisch, A.F. Path Loss Modeling for Vehicle-to-Vehicle Communications. IEEE Trans. Veh. Technol. 2011, 60, 323–328. (In English) [Google Scholar] [CrossRef]
- Zhou, T.; Li, C.; Zhang, W.; Ai, B.; Liu, L.; Liang, Y. Narrow-Beam Channel Measurements and Characterization in Vehicle-to-Infrastructure Scenarios for 5G-V2X Communications. IEEE Internet Things J. 2024, 11, 16074–16086. [Google Scholar] [CrossRef]
- Granda, F.; Azpilicueta, L.; Celaya-Echarri, M.; Lopez-Iturri, P.; Vargas-Rosales, C.; Falcone, F. Spatial V2X traffic density channel characterization for urban environments. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2761–2774. [Google Scholar] [CrossRef]
- Hindia, M.N.; Al-Samman, A.M.; Rahman, T.A.; Yazdani, T. Outdoor large-scale path loss characterization in an urban environment at 26, 28, 36, and 38 GHz. Phys. Commun. 2018, 27, 150–160. [Google Scholar] [CrossRef]
- Abbas, T.; Sjöberg, K.; Karedal, J.; Tufvesson, F. A measurement based shadow fading model for vehicle-to-vehicle network simulations. Int. J. Antennas Propag. 2015, 2015, 190607. [Google Scholar] [CrossRef]
- Chen, R.; Zhong, Z. Analysis on V2V connectivity under dual-slope path loss model in urban scenarios. In Proceedings of the 2014 XXXIth URSI General Assembly and Scientific Symposium (URSI GASS), Beijing, China, 16–23 August 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1–4. [Google Scholar]
- Eldeeb, H.B.; Miramirkhani, F.; Uysal, M. A path loss model for vehicle-to-vehicle visible light communications. In Proceedings of the 2019 15th International Conference on Telecommunications (ConTEL), Graz, Austria, 3–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar]
- Chen, R.; Sheng, Z.; Ni, M.; Zhong, Z.; Michelson, D.G. Channel capacity under measurement-based model for cooperative vehicular ad hoc networks. In Proceedings of the 2015 IEEE International Symposium on Antennas and Propagation & USNC/URSI National Radio Science Meeting, Vancouver, BC, Canada, 19–24 July 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 302–303. [Google Scholar]
- Li, W.; Hu, X.; Jiang, T. Path loss models for IEEE 802.15. 4 vehicle-to-infrastructure communications in rural areas. IEEE Internet Things J. 2018, 5, 3865–3875. [Google Scholar] [CrossRef]
- Dhanavanthan, B. Propagation Loss Measurements and Two Slope Modelling in Vehicular Environments for Intelligent Transportation Systems; SAE Technical Paper, 0148-7191; SAE International: Warrendale, PA, USA, 2017. [Google Scholar]
- Kurt, S.; Tavli, B. Path-Loss Modeling for Wireless Sensor Networks: A review of models and comparative evaluations. IEEE Antennas Propag. Mag. 2017, 59, 18–37. [Google Scholar] [CrossRef]
- Rubio, L.; Reig, J.; Fernández, H. Propagation aspects in vehicular networks. In Vehicular Technologies: Increasing Connectivity; Intech Open: London, UK, 2011; pp. 376–414. [Google Scholar]
- Cheng, L.; Henty, B.E.; Stancil, D.D.; Bai, F.; Mudalige, P. Mobile vehicle-to-vehicle narrow-band channel measurement and characterization of the 5.9 GHz dedicated short range communication (DSRC) frequency band. IEEE J. Sel. Areas Commun. 2007, 25, 1501–1516. [Google Scholar] [CrossRef]
- Cheng, L.; Henty, B.E.; Bai, F.; Stancil, D.D. Highway and rural propagation channel modeling for vehicle-to-vehicle communications at 5.9 GHz. In Proceedings of the 2008 IEEE Antennas and Propagation Society International Symposium, San Diego, CA, USA, 5–11 July 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 1–4. [Google Scholar]
- Yang, M.; Ai, B.; He, R.; Ma, Z.; Mi, H.; Fei, D.; Zhong, Z.; Li, Y.; Li, J. Dynamic V2V channel measurement and modeling at street intersection scenarios. IEEE Trans. Antennas Propag. 2023, 71, 4417–4432. [Google Scholar] [CrossRef]
- Huang, J.; Wang, C.-X.; Yang, Y.; Liu, Y.; Sun, J.; Zhang, W. Channel measurements and modeling for 400–600-MHz bands in urban and suburban scenarios. IEEE Internet Things J. 2020, 8, 5531–5543. [Google Scholar] [CrossRef]
- Kryszkiewicz, P.; Sroka, P.; Sybis, M.; Kliks, A. Path loss and shadowing modeling for vehicle-to-vehicle communications in terrestrial TV band. IEEE Trans. Antennas Propag. 2022, 71, 984–998. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Channel Sounder at 700 MHz | Channel Sounder at 5.9 GHz |
|---|---|---|
| Transmitted power | −20 dBm | −10 dBm |
| Points number | 401 | 5000 |
| Resolution bandwidth | 30 kHz | 100 kHz |
| SPAN | 0 | 0 |
| Dynamic range | 80 dB | 80 dB |
| Scenario | 700 MHz | |||||
| (dB) | (dB) | (dB) | (m) | |||
| 1 (Urban H-D) | 1.45 | 37.34 | 4.52 | 3.43 | 5.00 | 35.16 |
| 2 (Urban L-D) | 2.13 | 31.42 | 5.47 | 3.76 | 6.66 | 35.44 |
| 3 (Suburban) | 1.04 | 38.78 | 4.28 | 4.92 | 5.67 | 58.40 |
| Scenario | 5.9 GHz | |||||
| (dB) | (dB) | (dB) | (m) | |||
| 2 (Urban L-D) | 2.46 | 45.88 | 4.49 | 6.26 | 5.01 | 132.42 |
| 3 (Suburban) | 1.72 | 52.40 | 4.80 | 9.69 | 5.25 | 306.04 |
| Scenario | (dB) | (dB) | (m) | Frequency Band | Related Works | ||
|---|---|---|---|---|---|---|---|
| Suburban | 2.00–2.10 | 5.60–2.60 | 3.80–4.00 | 4.40–8.40 | 100 | 5.9 GHz | Ref. [26] |
| Highway | 1.90 | 2.50 | 4.00 | 0.90 | 220 | 5.9 GHz | Ref. [27] |
| Rural | 2.30 | 3.20 | 4.00 | 0.40 | 226 | ||
| Urban intersection 1 | 1.54 | 3.64 | 3.96 | 4.81 | 24.5 | 5.9 GHz | Ref. [28] |
| Urban intersection 2 | 1.56 | 3.64 | 5.34 | 4.81 | 40 | ||
| Urban intersection 3 | 1.53 | 3.64 | 4.86 | 4.81 | 45 | ||
| Urban | 0.10 | 3.03 | 5.24 | 7.40 | 120 | 500 MHz | Ref. [29] |
| Suburban | 1.47 | 6.63 | 6.42 | 9.22 | 200 | ||
| Urban | 1.60 | 2.20 | 3.14 | 4.50 | 35 | 725 MHz | Ref. [30] |
| Scenario | Conditions | (dB) | (m) | Frequency Band | Related Works | ||
| Highway | LOS | 1.66 | 2.88 | 3.95 | 104 | 5.6 GHz | Ref. [18] |
| OLOS | ---- | 3.18 | 6.12 | ||||
| Urban | LOS | 1.81 | 2.85 | 4.15 | 104 | ||
| OLOS | 1.93 | 2.74 | 6.67 | 104 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fernández, H.; Rubio, L.; Rodrigo Peñarrocha, V.M.; Reig, J. Dual-Slope Path Loss Model for Integrating Vehicular Sensing Applications in Urban and Suburban Environments. Sensors 2024, 24, 4334. https://doi.org/10.3390/s24134334
Fernández H, Rubio L, Rodrigo Peñarrocha VM, Reig J. Dual-Slope Path Loss Model for Integrating Vehicular Sensing Applications in Urban and Suburban Environments. Sensors. 2024; 24(13):4334. https://doi.org/10.3390/s24134334
Chicago/Turabian StyleFernández, Herman, Lorenzo Rubio, Vicent M. Rodrigo Peñarrocha, and Juan Reig. 2024. "Dual-Slope Path Loss Model for Integrating Vehicular Sensing Applications in Urban and Suburban Environments" Sensors 24, no. 13: 4334. https://doi.org/10.3390/s24134334
APA StyleFernández, H., Rubio, L., Rodrigo Peñarrocha, V. M., & Reig, J. (2024). Dual-Slope Path Loss Model for Integrating Vehicular Sensing Applications in Urban and Suburban Environments. Sensors, 24(13), 4334. https://doi.org/10.3390/s24134334