Design Method of Freeform Surface Optical Systems with Low Coupling Position Error Sensitivity


Abstract
:1. Introduction
2. Theoretical Analysis of Coupling Position Error Sensitivity
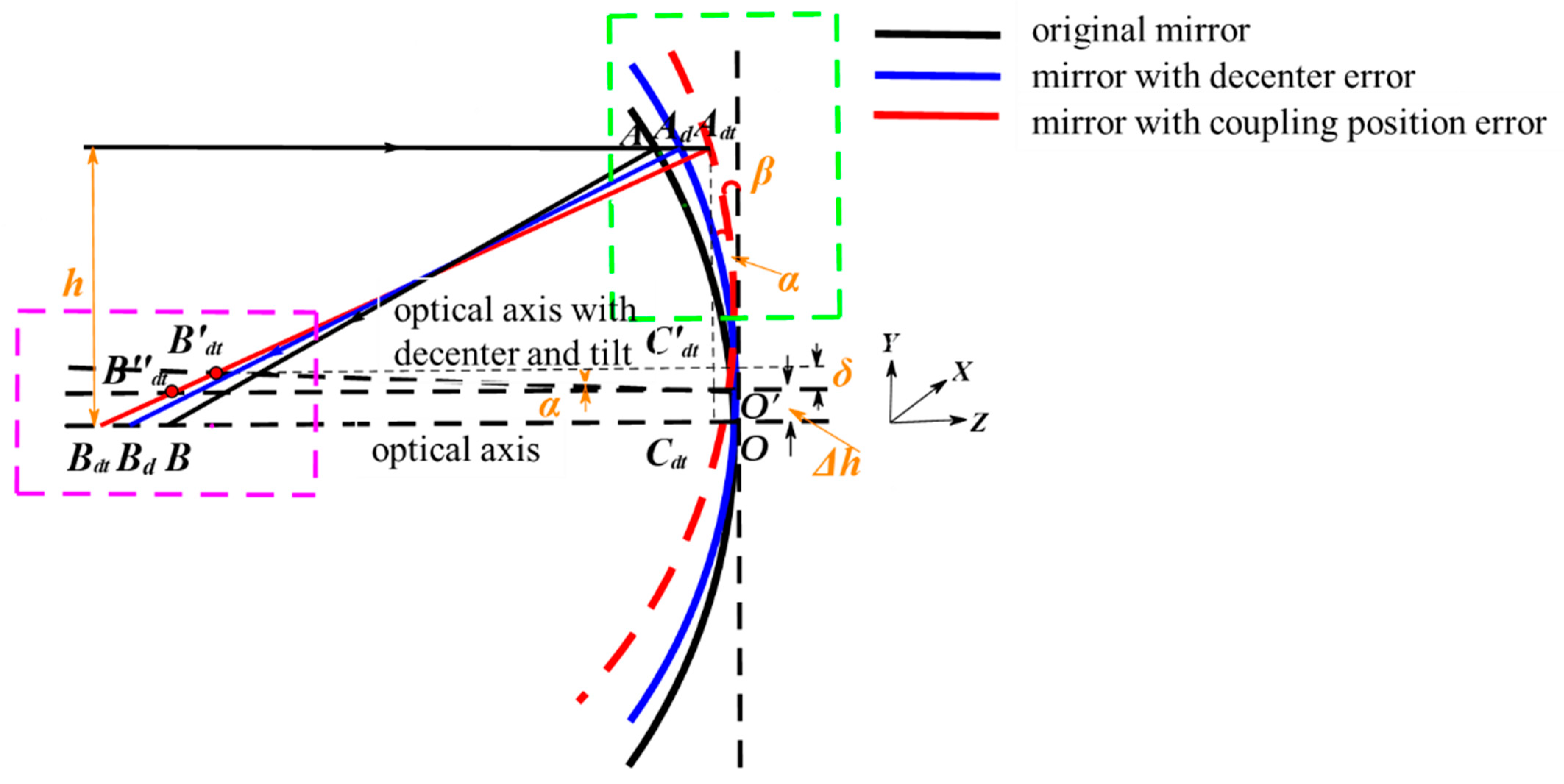
2.1. Mathematical Model of Coupling Position Error Sensitivity
2.2. Error Sensitivity Evaluation Function
3. Simulation and Verification of Desensitization Design Method
3.1. Desensitization Design Method
- (1)
- Construction of the initial freeform surface system according to the requirements of the optical system index.
- (2)
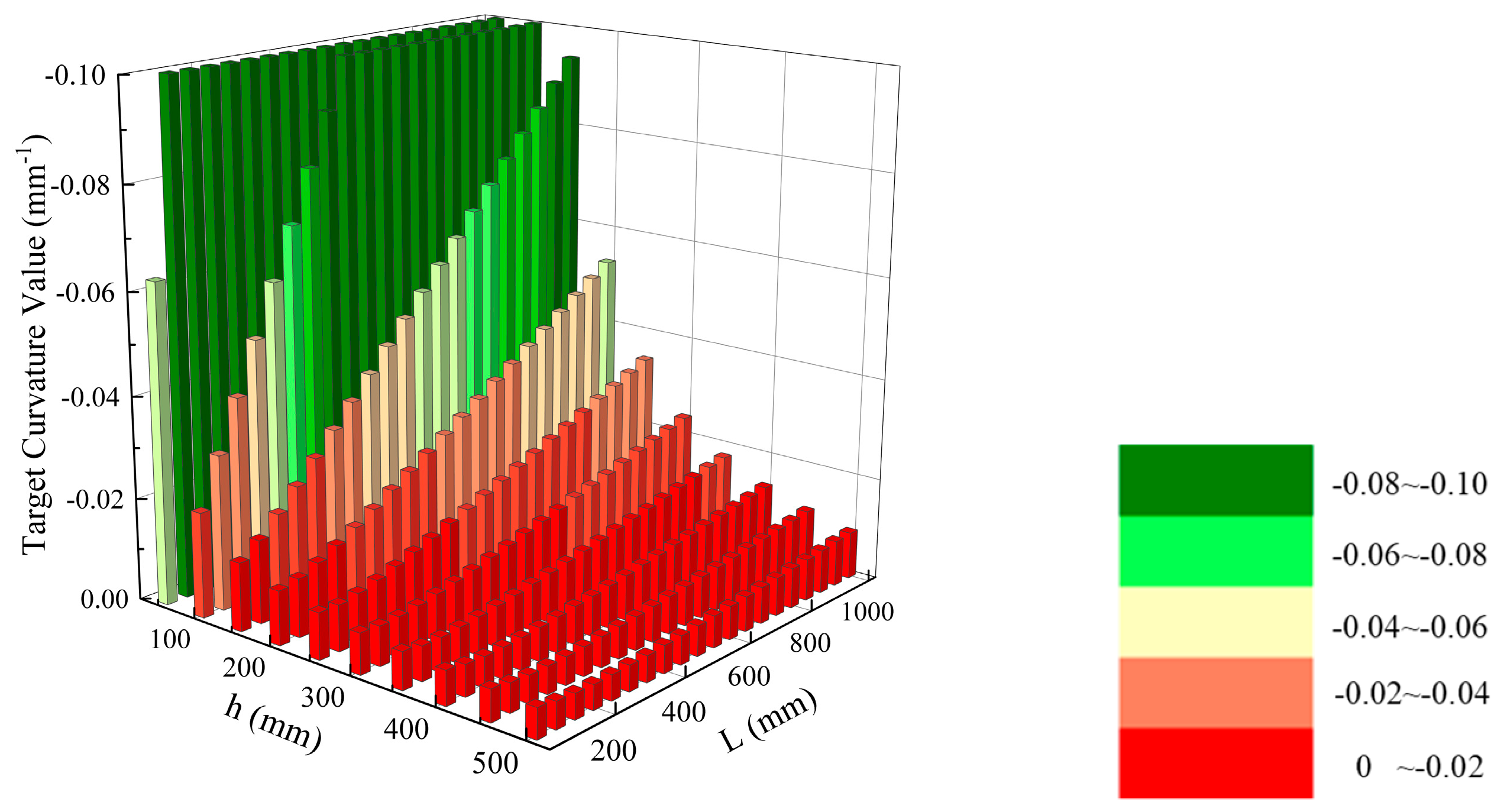
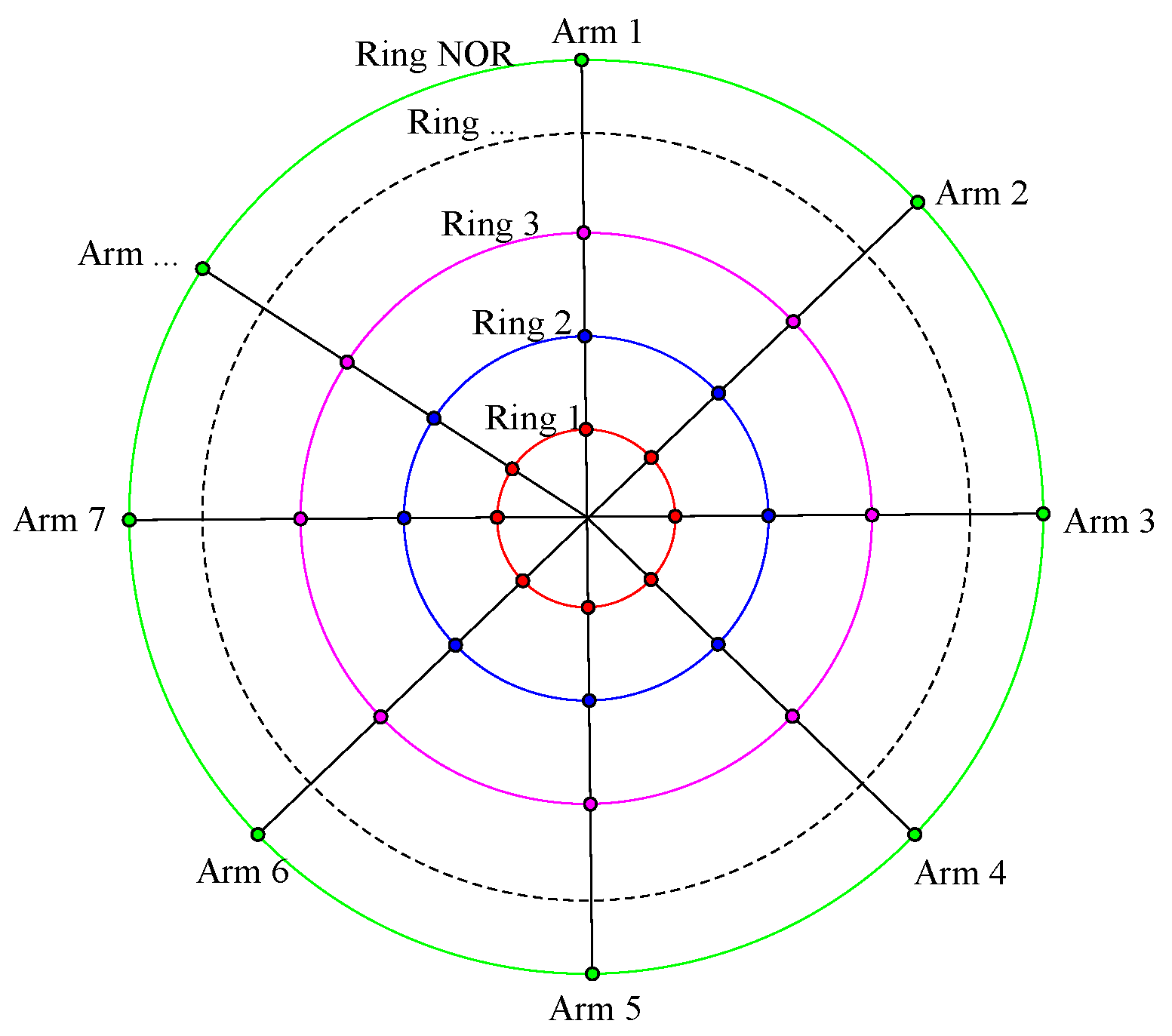
- Establishment of coupling position error sensitivity evaluation function. First, the microelement method is used to divide the freeform surface, and the target curvature value of each microquadric can be calculated according to Equation (10). Then, the system coupling position error sensitivity evaluation function can be constructed based on the idea of clustering and Equation (14)~(16).
- (3)
- Error sensitivity optimization. The optimization goal is to reduce the error sensitivity evaluation function value of the system. If the optical system meets the image performance requirements, the optical system needs to be continued to be optimized. If not, the system can be output as the final result.
3.2. Simulation of Desensitization Design Method
3.3. Verification of Desensitization Design Method
- In order to verify the correctness and effectiveness of the FCPESM method, we conducted coupling error sensitivity analysis on “System 1”, “System 14” and “System 17”, respectively. The tolerance of the system was set to tilt ± 0.01°, decenter ± 0.01 mm. We used the Monte Carlo tolerance analysis method with 2000 samples to calculate the error sensitivity of the optical systems, with ΔRMS WFE as the error sensitivity evaluation criterion. ΔRMS WFE is the change in the RMS WFE before and after the error perturbation.
- The coupling position error sensitivity ΔRMS WFE comparison of the full field of view of “System 1”, “System 14” and “System 17” is shown in Figure 8. It can be seen from Figure 8 that after perturbation by the coupling error, the average ΔRMS WFE of “System 1” is 0.00500λ and the average ΔRMS WFE of “System 17” is 0.00293λ. With the same coupling position error perturbation, the average ΔRMS WFE of “System 14” is 0.00220λ. The average ΔRMS WFE of “System 14” obtained using the FCPESM method was reduced by 56% compared with that of the optical system before desensitization. The coupling position error sensitivity of “System 14” was reduced by 25% compared with “System 17”, proving the effectiveness of the FCPESM method.


4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, Q.; Wang, H.; Wang, K.; Wang, Y.; Ji, Z.; Wang, D. Off-axis three-mirror freeform telescope with a large linear field of view based on an integration mirror. Appl. Opt. 2016, 55, 8962–8970. [Google Scholar] [CrossRef]
- Meng, Q.; Wang, H.; Wang, W.; Yan, Z. Desensitization design method of unobscured three-mirror anastigmatic optical systems with an adjustment-optimization-evaluation process. Appl. Opt. 2018, 57, 1472–1481. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Gong, T.; Jin, G.; Zhu, J. Design method for assembly-insensitive freeform reflective optical systems. Opt. Express 2018, 26, 27798–27811. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Zhu, J.; Jin, G. Compact freeform off-axis three-mirror imaging system based on the integration of primary and tertiary mirrors on one single surface. Chin. Opt. Lett. 2016, 14, 060801. [Google Scholar] [CrossRef]
- Rodgers, J.M. Unobscured mirror designs. In Proceedings of the International Optical Design Conference 2002, Tucson, AZ, USA, 23 December 2002; Volume 4832, pp. 33–60. [Google Scholar]
- Yang, T.; Zhu, J.; Hou, W.; Jin, G. Design method of freeform off-axis reflective imaging systems with a direct construction process. Opt. Express 2014, 22, 9193–9205. [Google Scholar] [CrossRef]
- Schifano, L.; Berghmans, F.; Dewitte, S.; Smeesters, L. Optical Design of a Novel Wide-Field-of-View Space-Based Spectrometer for Climate Monitoring. Sensors 2022, 22, 5841. [Google Scholar] [CrossRef] [PubMed]
- Cheng, D.; Wang, Y.; Hua, H.; Talha, M.M. Design of an optical see-through head-mounted display with a low f-number and large field of view using a freeform prism. Appl. Opt. 2009, 48, 2655–2668. [Google Scholar] [CrossRef]
- Hou, J.; Li, H.; Zheng, Z.; Liu, X. Distortion correction for imaging on non-planar surface using freeform lens. Opt. Commun. 2012, 285, 986–991. [Google Scholar] [CrossRef]
- Bauer, A.; Rolland, J.P. Visual space assessment of two all-reflective, freeform, optical see-through head-worn displays. Opt. Express 2014, 22, 13155–13163. [Google Scholar] [CrossRef] [PubMed]
- Cheng, D.; Wang, Y.; Hua, H.; Sasian, J. Design of a wide-angle, lightweight head-mounted display using free-form optics tiling. Opt. Lett. 2011, 36, 2098–2100. [Google Scholar] [CrossRef]
- Nie, Y.; Gross, H.; Zhong, Y.; Duerr, F. Freeform optical design for a nonscanning corneal imaging system with a convexly curved image. Appl. Opt. 2017, 56, 5630–5638. [Google Scholar] [CrossRef] [PubMed]
- Muslimov, E.; Hugot, E.; Jahn, W.; Vives, S.; Ferrari, M.; Chambion, B.; Gaschet, C. Combining freeform optics and curved detectors for wide field imaging: A polynomial approach over squared aperture. Opt. Express 2017, 25, 14598–14610. [Google Scholar] [CrossRef] [PubMed]
- Wojtanowski, J.; Jakubaszek, M.; Zygmunt, M. Freeform mirror design for novel laser warning receivers and laser angle of incidence sensors. Sensors 2020, 20, 2569. [Google Scholar] [CrossRef]
- Schifano, L.; Vervaeke, M.; Rosseel, D.; Verbaenen, J.; Thienpont, H.; Dewitte, S.; Berghmans, F.; Smeesters, L. Freeform Wide Field-of-View Spaceborne Imaging Telescope: From Design to Demonstrator. Sensors 2022, 22, 8233. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Wang, T.; Tao, S.; Zhang, D.; Ren, S.; Ma, B.; Zhang, C. Research on the Design and Alignment Method of the Optic-Mechanical System of an Ultra-Compact Fully Freeform Space Camera. Sensors 2023, 23, 9399. [Google Scholar] [CrossRef] [PubMed]
- Yang, T.; Zhu, J.; Jin, G. Design of a freeform, dual fields-of-view, dual focal lengths, off-axis three-mirror imaging system with a point-by-point construction-iteration process. Chin. Opt. Lett. 2016, 14, 100801. [Google Scholar] [CrossRef]
- Hao, Q.; Liu, Y.; Hu, Y.; Tao, X. Measurement techniques for aspheric surface parameters. Light Adv. Manuf. 2023, 4, 292–310. [Google Scholar] [CrossRef]
- Cheng, D.; Wang, Q.; Liu, Y.; Chen, H.; Ni, D.; Wang, X.; Yao, C.; Hou, Q.; Hou, W.; Luo, G.; et al. Design and manufacture AR head-mounted displays: A review and outlook. Light Adv. Manuf. 2021, 2, 350–369. [Google Scholar] [CrossRef]
- Thompson, K.P.; Schiesser, E.; Rolland, J.P. Why are freeform telescopes less alignment sensitive than a traditional unobscured TMA? In Proceedings of the SPIE Optifab, New York, NY, USA, 11 October 2015; Volume 9633, pp. 320–324. [Google Scholar]
- Deng, Y.; Jin, G.; Zhu, J. Design method for freeform reflective-imaging systems with low surface-figure-error sensitivity. Chin. Opt. Lett. 2019, 17, 092201. [Google Scholar] [CrossRef]
- Qin, Z.; Qi, Y.; Ren, C.; Wang, X.; Meng, Q. Desensitization design method for freeform TMA optical systems based on initial structure screening. Photonics 2022, 9, 544. [Google Scholar] [CrossRef]
- Funck, M.C.; Loosen, P. The effect of selective assembly on tolerance desensitization. In Proceedings of the International Optical Design Conference, Jackson Hole, WY, USA, 13–17 June 2010. [Google Scholar]
- Kuper, T. A new look at global optimization for optical design. Photonics Spectra 1992, 26, 151. [Google Scholar]
- Rogers, J.R. Using global synthesis to find tolerance-insensitive design forms. In Proceedings of the International Optical Design Conference, Vancouver, Canada, 4–8 June 2006. [Google Scholar]
- Kuper, T. Global optimization finds alternative lens designs. Laser Focus World 1992, 5, 193–195. [Google Scholar]
- Carrión-Higueras, L.; Calatayud, A.; Sasian, J. Improving as-built miniature lenses that use many aspheric surface coefficients with two desensitizing techniques. Opt. Eng. 2021, 60, 051208. [Google Scholar] [CrossRef]
- Hopkins, H.H.; Tiziani, H.J. A theoretical and experimental study of lens centring errors and their influence on optical image quality. Br. J. Appl. Phys. 1966, 17, 33. [Google Scholar] [CrossRef]
- Sasian, J. Lens desensitizing: Theory and practice. Appl. Opt. 2022, 61, A62–A67. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Tang, Y.; Wang, P.; Li, Y.; Zhu, D.; Shun, H.; Chen, B. Method of tolerance sensitivity reduction of optical system design. Opto-Electron. Eng. 2011, 38, 127–133. [Google Scholar]
- Zhang, K.; Zhong, X.; Wang, W.; Meng, Y.; Liu, J. Ultra-low-distortion optical system design based on tolerance sensitivity optimization. Opt. Commun. 2019, 437, 231–236. [Google Scholar] [CrossRef]
- Wang, L.; Sasian, J.M. Merit figures for fast estimating tolerance sensitivity in lens systems. In Proceedings of the International Optical Design Conference 2010, Jackson Hole, WY, USA, 9 September 2010; pp. 564–571. [Google Scholar]
- Isshiki, M.; Gardner, L.; Gregory, G.G. Automated control of manufacturing sensitivity during optimization. In Proceedings of the Optical Design and Engineering, St. Etienne, France, 18 February 2004; pp. 343–352. [Google Scholar]
- Isshiki, M.; Sinclair, D.C.; Kaneko, S. Lens design: Global optimization of both performance and tolerance sensitivity. In Proceedings of the International Optical Design Conference, Vancouver, Canada, 4–8 June 2006. [Google Scholar]
- Jeffs, M. Reduced manufacturing sensitivity in multi-element lens systems. In Proceedings of the International Optical Design Conference, Tucson, AZ, USA, 3–5 June 2002. [Google Scholar]
- Qin, Z.; Wang, X.; Ren, C.; Qi, Y.; Meng, Q. Design method for a reflective optical system with low tilt error sensitivity. Opt. Express 2021, 29, 43464–43479. [Google Scholar] [CrossRef]
- Qin, Z.; Meng, Q.; Wang, X. Desensitization design method of a freeform optical system based on local curve control. Opt. Lett. 2023, 48, 179–182. [Google Scholar] [CrossRef] [PubMed]
- Geng, Z.; Tong, Z.; Jiang, X. Review of geometric error measurement and compensation techniques of ultra-precision machine tools. Light Adv. Manuf. 2021, 2, 211–227. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Surface Type | Radius (mm) | Thickness (mm) | Conic | Order | x Tilt (mm) | y Decenter (mm) | |
|---|---|---|---|---|---|---|---|
| PM | xy polynomial | −2496.633 | −685.48 | −2.40 | 6 | 4.74 | −149.67 |
| SM | xy polynomial | −740.014 | 675.71 | 2.99 | 6 | −0.10 | −0.39 |
| TM | xy polynomial | −1034.194 | −733.64 | 0.28 | 6 | −11.59 | 143.49 |
| Surface Type | Radius (mm) | Thickness (mm) | Conic | Order | x Tilt (mm) | y Decenter (mm) | |
|---|---|---|---|---|---|---|---|
| PM | xy polynomial | −2527.665 | −694.32 | −2.49 | 6 | 4.80 | −151.69 |
| SM | xy polynomial | −747.80 | 685.22 | −5.06 | 6 | −0.11 | 0.178 |
| TM | xy polynomial | −1038.61 | −734.90 | 0.28 | 6 | −11.80 | 147.62 |
| Surface Type | Radius (mm) | Thickness (mm) | Conic | Order | x Tilt (mm) | y Decenter (mm) | |
|---|---|---|---|---|---|---|---|
| PM | xy polynomial | −2490.58 | −679.26 | −2.51 | 6 | 3.38 | −147.11 |
| SM | xy polynomial | −744.74 | 681.32 | −3.25 | 6 | −0.087 | −0.202 |
| TM | xy polynomial | −1042.69 | −739.98 | 0.29 | 6 | −11.48 | 144.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, Y.; Huang, Y.; Yan, C.; Shao, M. Design Method of Freeform Surface Optical Systems with Low Coupling Position Error Sensitivity. Sensors 2024, 24, 4387. https://doi.org/10.3390/s24134387
Xia Y, Huang Y, Yan C, Shao M. Design Method of Freeform Surface Optical Systems with Low Coupling Position Error Sensitivity. Sensors. 2024; 24(13):4387. https://doi.org/10.3390/s24134387
Chicago/Turabian StyleXia, Yu, Yawei Huang, Changxiang Yan, and Mingxiao Shao. 2024. "Design Method of Freeform Surface Optical Systems with Low Coupling Position Error Sensitivity" Sensors 24, no. 13: 4387. https://doi.org/10.3390/s24134387