

Model Predictive Control (MPC) of a Countercurrent Flow Plate Heat Exchanger in a Virtual Environment


 , and
, and
Abstract
1. Introduction
2. Description of the Counter Current Flow Plate Heat Exchanger
2.1. Mathematical Modeling of the Countercurrent Flow Parallel Plate Heat Exchanger
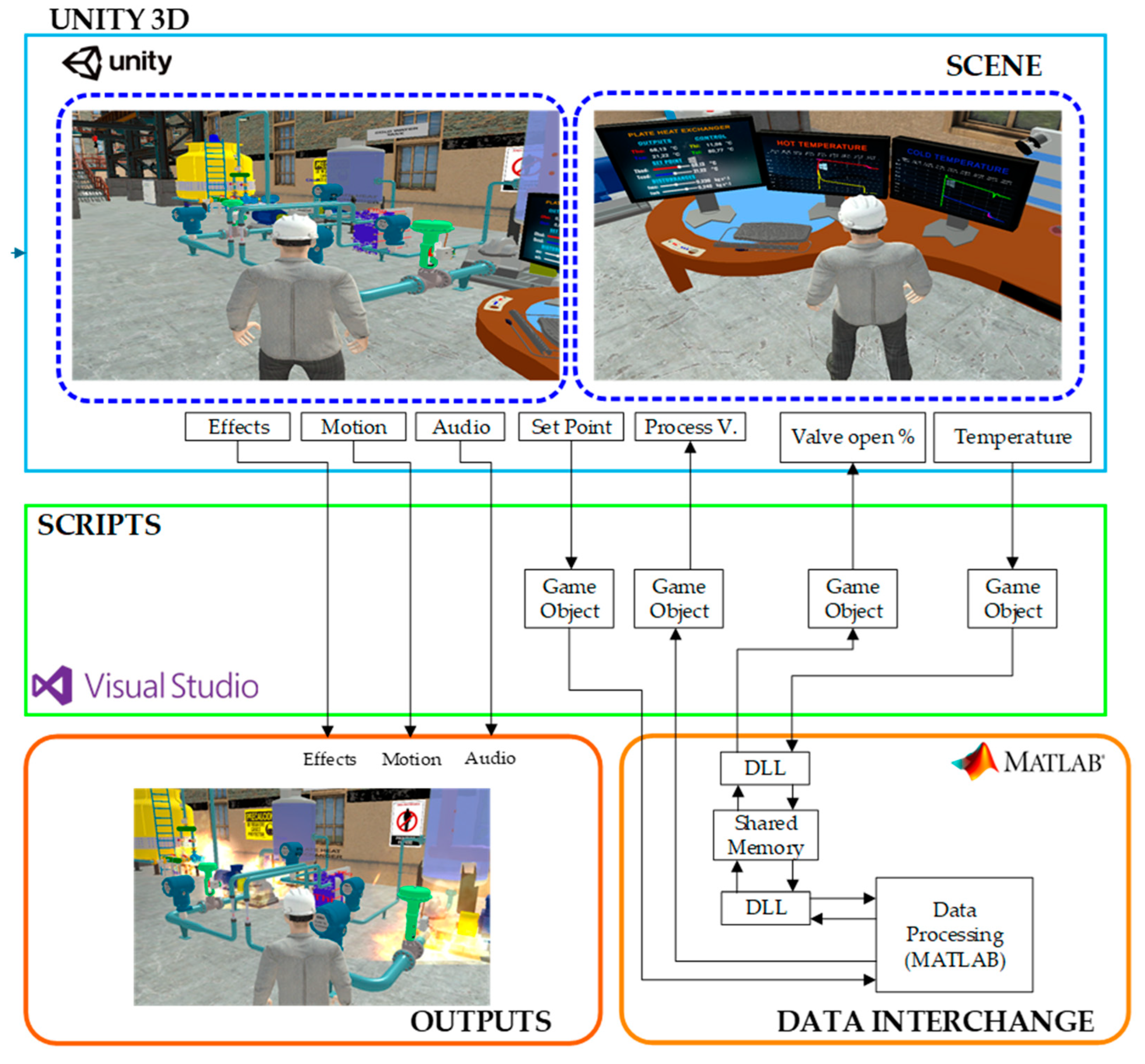
2.2. Virtual Environment Developed
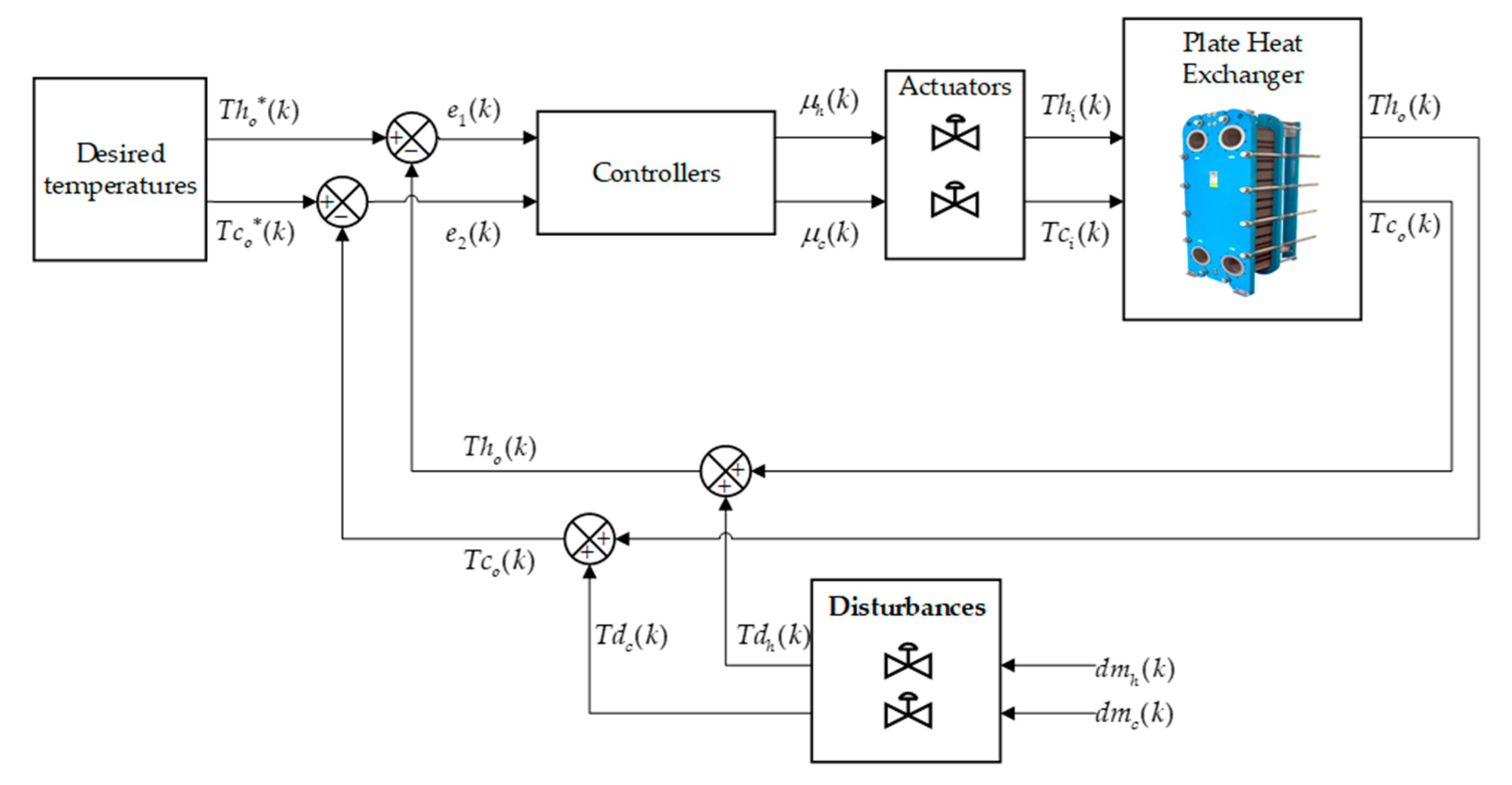
3. Design of System Control Strategies
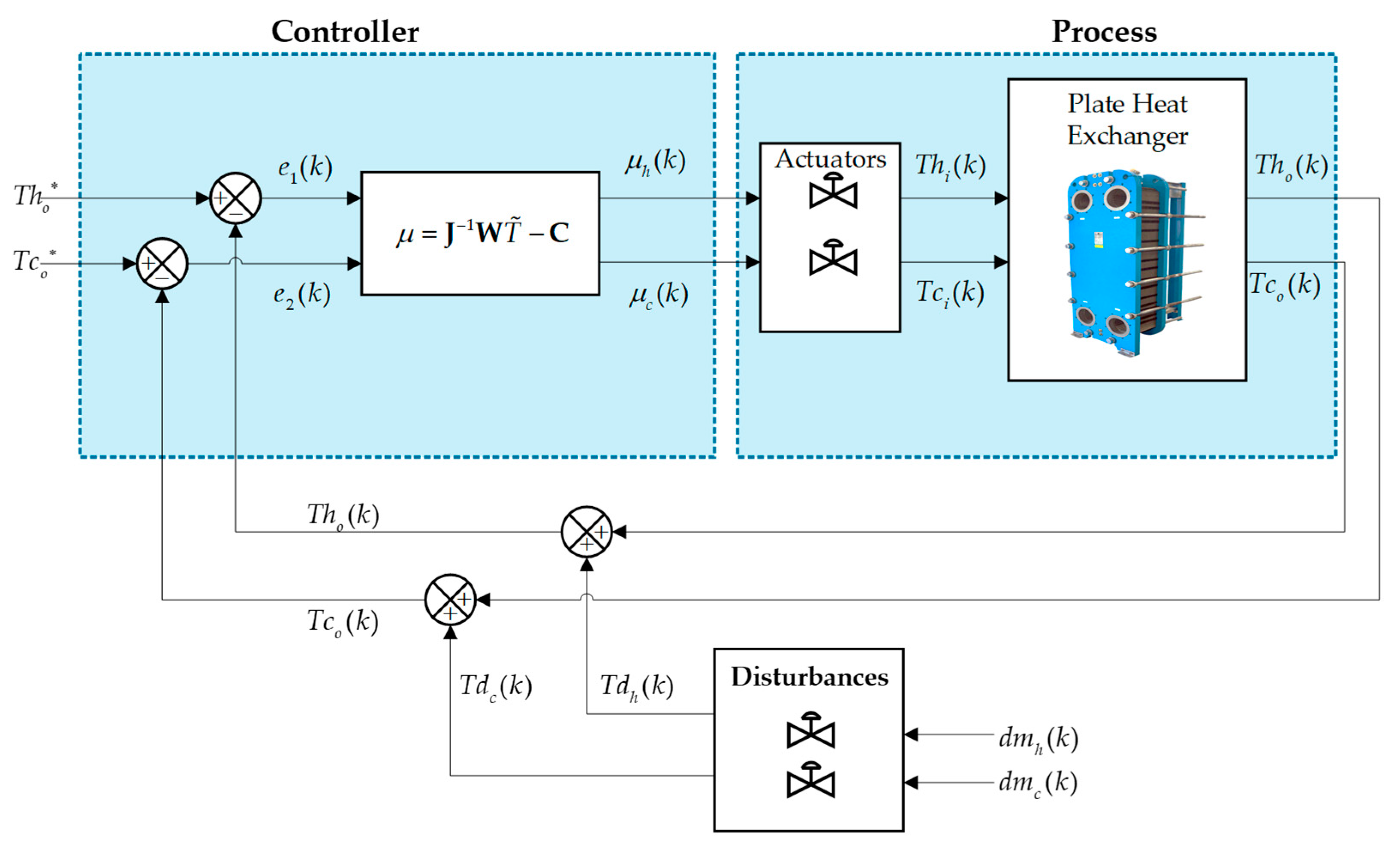
3.1. Control Based on the Inverse of the Plant
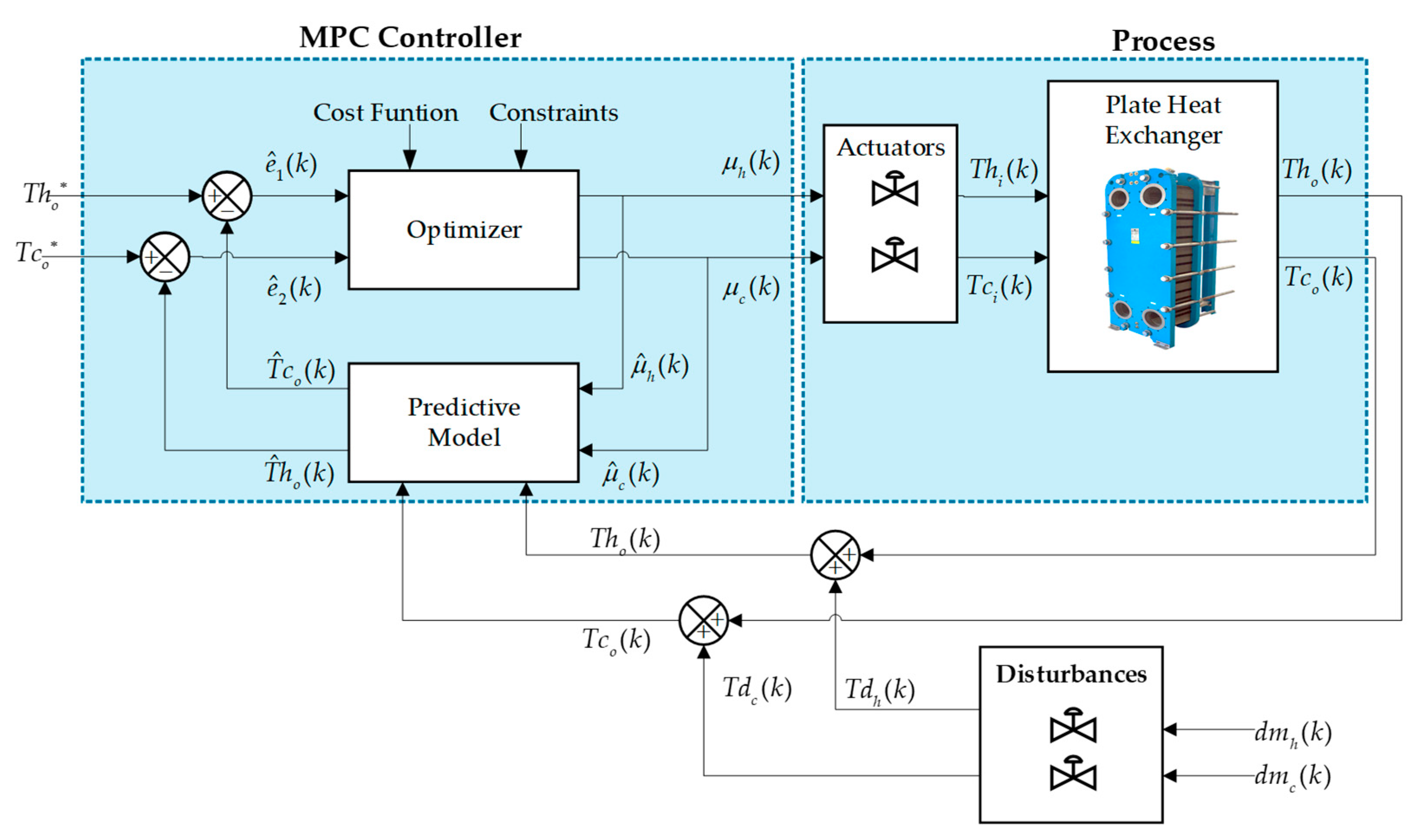
3.2. Predictive Control (MPC)
4. Results
4.1. Virtual Countercurrent Flow Plate Heat Exchanger Environment
4.2. Performance of the Proposed Controllers for the Countercurrent Plate Heat Exchanger
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Amores, D.; Villagómez, J.; Llanos, J.; Ortiz, D. Control of a Virtual Cascade Integrated System with Constant Steam Feed Boiler to a Reactor for the Production of Aluminum Chloride Using a Model Predictive Control MPC. In Proceedings of the 2022 IEEE International Conference on Automation/XXV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Curicó, Chile, 24–28 October 2022; p. 8. [Google Scholar] [CrossRef]
- Arsenyeva, O.; Tovazhnyanskyy, L.; Kapustenko, P.; Klemeš, J.J.; Varbanov, P.S. Review of Developments in Plate Heat Exchanger Heat Transfer Enhancement for Single-Phase Applications in Process Industries. Energies 2023, 16, 4976. [Google Scholar] [CrossRef]
- Xu, K.; Smith, R.; Zhang, N. Design and Optimization of Plate Heat Exchanger Networks; Elsevier Masson SAS: Paris, France, 2017; Volume 40, ISBN 9780444639653. [Google Scholar]
- Pivarčiová, E.; Qazizada, M.E. Heat Transfer and Global Energy Balance in a Plate Heat Exchanger. Manuf. Technol. 2018, 18, 992–1000. [Google Scholar] [CrossRef]
- Mota, F.A.S.; Carvalho, E.P.; Ravagnani, M.A.S.S. Modeling and Design of Plate Heat Exchanger Chapter. Heat Transf. Stud. Appl. 2015, 32, 137–144. [Google Scholar] [CrossRef]
- Zhang, J.; Zhu, X.; Mondejar, M.E.; Haglind, F. A review of heat transfer enhancement techniques in plate heat exchangers. Renew. Sustain. Energy Rev. 2019, 86, 305–328. [Google Scholar] [CrossRef]
- Al-Dawery, S.K.; Alrahawi, A.M.; Al-Zobai, K.M. Dynamic modeling and control of plate heat exchanger. Int. J. Heat Mass Transf. 2012, 55, 6873–6880. [Google Scholar] [CrossRef]
- Bobič, M.; Gjerek, B.; Golobič, I.; Bajsić, I. Dynamic behaviour of a plate heat exchanger: Influence of temperature disturbances and flow configurations. Int. J. Heat Mass Transf. 2020, 163, 120439. [Google Scholar] [CrossRef]
- Zobiri, F.; Witrant, E.; Bonne, F. PDE Observer Design for Counter-Current Heat Flows in a Heat-Exchanger. IFAC-PapersOnLine 2017, 50, 7127–7132. [Google Scholar] [CrossRef]
- El-Said, E.M.S.; Abd Elaziz, M.; Elsheikh, A.H. Machine learning algorithms for improving the prediction of air injection effect on the thermohydraulic performance of shell and tube heat exchanger. Appl. Therm. Eng. 2021, 185, 116471. [Google Scholar] [CrossRef]
- Tuncer, A.D.; Sözen, A.; Khanlari, A.; Gürbüz, E.Y.; Variyenli, H.İ. Analysis of thermal performance of an improved shell and helically coiled heat exchanger. Appl. Therm. Eng. 2021, 184, 116272. [Google Scholar] [CrossRef]
- Egea, A.; García, A.; Herrero-Martín, R.; Pérez-García, J. Experimental performance of a novel scraped surface heat exchanger for latent energy storage for domestic hot water generation. Renew. Energy 2022, 193, 870–878. [Google Scholar] [CrossRef]
- Kleszcz, S.; Mazur, P.; Zych, M.; Jaszczur, M. An experimental investigation of the thermal efficiency and pressure drop for counterflow heat exchangers intended for recuperator. EPJ Web Conf. 2022, 269, 01027. [Google Scholar] [CrossRef]
- Wang, D.; Wu, Q.; Wang, G.; Zhang, H.; Yuan, H. Experimental and numerical study of plate heat exchanger based on topology optimization. Int. J. Therm. Sci. 2024, 195, 108659. [Google Scholar] [CrossRef]
- Alklaibi, A.M.; Sundar, L.S.; Chandra Mouli, K.V.V. Experimental investigation on the performance of hybrid Fe3O4 coated MWCNT/Water nanofluid as a coolant of a Plate heat exchanger. Int. J. Therm. Sci. 2022, 171, 107249. [Google Scholar] [CrossRef]
- Ghalandari, M.; Irandoost Shahrestani, M.; Maleki, A.; Safdari Shadloo, M.; El Haj Assad, M. Applications of intelligent methods in various types of heat exchangers: A review. J. Therm. Anal. Calorim. 2021, 145, 1837–1848. [Google Scholar] [CrossRef]
- Sarzosa, M.; Yandún, A.; Garcés, L. Análisis del Rendimiento de un Reactor Químico Isotérmico Mediante Controladores PID, SSC y SMC. Rev. Politéc. 2018, 40, 19–24. [Google Scholar]
- Bastida, H.; Ugalde-Loo, C.E.; Abeysekera, M.; Qadrdan, M. Dynamic modeling and control of a plate heat exchanger. In Proceedings of the 2017 IEEE Conference on Energy Internet and Energy System Integration (EI2), Beijing, China, 26–28 November 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Vega, D.M.; Acevedo, H.G. Advanced Control System Design for a Plate Heat Exchanger. In Proceedings of the 2020 IX International Congress of Mechatronics Engineering and Automation (CIIMA), Cartagena, Colombia, 4–6 November 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Poorani, V.J.; Anand, L.D.V. Comparison of PID controller and Smith predictor controller for heat exchanger. In Proceedings of the 2013 IEEE International Conference ON Emerging Trends in Computing, Communication and Nanotechnology (ICECCN), Tirunelveli, India, 25–26 March 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 217–221. [Google Scholar]
- Saranya, S.N.; Sivakumar, V.M.; Thirumarimurugan, M.; Sowparnika, G.C. An analysis on modeling and optimal control of the heat exchangers using PI and PID controllers. In Proceedings of the 2017 4th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 6–7 January 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–8. [Google Scholar]
- Flores-Bungacho, F.; Guerrero, J.; Llanos, J.; Ortiz-Villalba, D.; Navas, A.; Velasco, P. Development and Application of a Virtual Reality Biphasic Separator as a Learning System for Industrial Process Control. Electronics 2022, 11, 636. [Google Scholar] [CrossRef]
- Aimacaña-Cueva, L.; Gahui-Auqui, O.; Llanos-Proaño, J.; Ortiz-Villalba, D. Advanced Control Algorithms for a Horizontal Three-Phase Separator in a Hardware in the Loop Simulation Environment. In International Conference on Applied Technologies; Springer: Cham, Switzerland, 2023; Volume 1535, pp. 399–414. ISBN 978-3-031-03883-9. [Google Scholar]
- Orrala, T.; Burgasi, D.; Llanos, J.; Ortiz-Villalba, D. Model Predictive Control Strategy for a Combined-Cycle Power-Plant Boiler. In Proceedings of the 2021 IEEE International Conference on Automation/XXIV Congress of the Chilean Association of Automatic Control (ICA-ACCA), Valparaíso, Chile, 22–26 March 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Skrjanc, I.; Matko, D. Predictive functional control based on fuzzy model for heat-exchanger pilot plant. IEEE Trans. Fuzzy Syst. 2000, 8, 705–712. [Google Scholar] [CrossRef]
- Khadir, M.T. Enthalpy predictive functional control of a pasteurisation plant based on a plate heat exchanger. Int. J. Model. Identif. Control 2011, 13, 78. [Google Scholar] [CrossRef]
- Michel, A.; Kugi, A. Model based control of compact heat exchangers independent of the heat transfer behavior. J. Process Control 2014, 24, 286–298. [Google Scholar] [CrossRef]
- Wang, Y.; You, S.; Zheng, W.; Zhang, H.; Zheng, X.; Miao, Q. State space model and robust control of plate heat exchanger for dynamic performance improvement. Appl. Therm. Eng. 2018, 128, 1588–1604. [Google Scholar] [CrossRef]
- Martins, A.; Costelha, H.; Neves, C. Shop Floor Virtualization and Industry 4.0. In Proceedings of the 2019 IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Porto, Portugal, 24–26 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar]
- Erdogdu, F.; Sarghini, F.; Marra, F. Mathematical Modeling for Virtualization in Food Processing. Food Eng. Rev. 2017, 9, 295–313. [Google Scholar] [CrossRef]
- Marra, F. Virtualization of processes in food engineering. J. Food Eng. 2016, 176, 1. [Google Scholar] [CrossRef]
- Muyón, K.; Chimbana, L.; Llanos, J.; Ortiz-Villalba, D. PID and Model Predictive Control (MPC) Strategies Design for a Virtual Distributed Solar Collector Field. In International Conference on Smart Technologies, Systems and Applications; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2023; Volume 1705, pp. 453–467. [Google Scholar] [CrossRef]
- Chanchay, D.J.; Feijoo, J.D.; Llanos, J.; Ortiz-Villalba, D. Virtual Festo MPS® PA Workstation for Level and Temperature Process Control. In Recent Advances in Electrical Engineering, Electronics and Energy: Proceedings of the CIT 2020 Volume 1; Lecture Notes in Electrical Engineering; Springer: Cham, Switzerland, 2021; Volume 762, pp. 164–180. ISBN 9783030722074. [Google Scholar]
- Khan, A.R.; Baker, N.S.; Wardle, A.P. The dynamic characteristics of a countercurrent plate heat exchanger. Int. J. Heat Mass Transf. 1988, 31, 1269–1278. [Google Scholar] [CrossRef]
- Boukezzoula, R.; Galichet, S.; Foulloy, L. Nonlinear internal model control: Application of inverse model based fuzzy control. IEEE Trans. Fuzzy Syst. 2003, 11, 814–829. [Google Scholar] [CrossRef]
- Kumar, A.S.; Ahmad, Z. Model Predictive Control (MPC) and Its Current Issues in Chemical Engineering. Chem. Eng. Commun. 2012, 199, 472–511. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Inverse-Based Control of the Plant | MPC Control |
|---|---|---|
| Steady-state error |
| Parameters | Inverse-Based Control of the Plant | MPC Control |
|---|---|---|
| Steady-state error |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Siza, J.; Llanos, J.; Velasco, P.; Moya, A.P.; Sumba, H. Model Predictive Control (MPC) of a Countercurrent Flow Plate Heat Exchanger in a Virtual Environment. Sensors 2024, 24, 4511. https://doi.org/10.3390/s24144511
Siza J, Llanos J, Velasco P, Moya AP, Sumba H. Model Predictive Control (MPC) of a Countercurrent Flow Plate Heat Exchanger in a Virtual Environment. Sensors. 2024; 24(14):4511. https://doi.org/10.3390/s24144511
Chicago/Turabian StyleSiza, Jairo, Jacqueline Llanos, Paola Velasco, Alexander Paul Moya, and Henry Sumba. 2024. "Model Predictive Control (MPC) of a Countercurrent Flow Plate Heat Exchanger in a Virtual Environment" Sensors 24, no. 14: 4511. https://doi.org/10.3390/s24144511
APA StyleSiza, J., Llanos, J., Velasco, P., Moya, A. P., & Sumba, H. (2024). Model Predictive Control (MPC) of a Countercurrent Flow Plate Heat Exchanger in a Virtual Environment. Sensors, 24(14), 4511. https://doi.org/10.3390/s24144511