
CORAL—Catamaran for Underwater Exploration: Development of a Multipurpose Unmanned Surface Vessel for Environmental Studies


Abstract
:1. Introduction
2. Materials and Methods
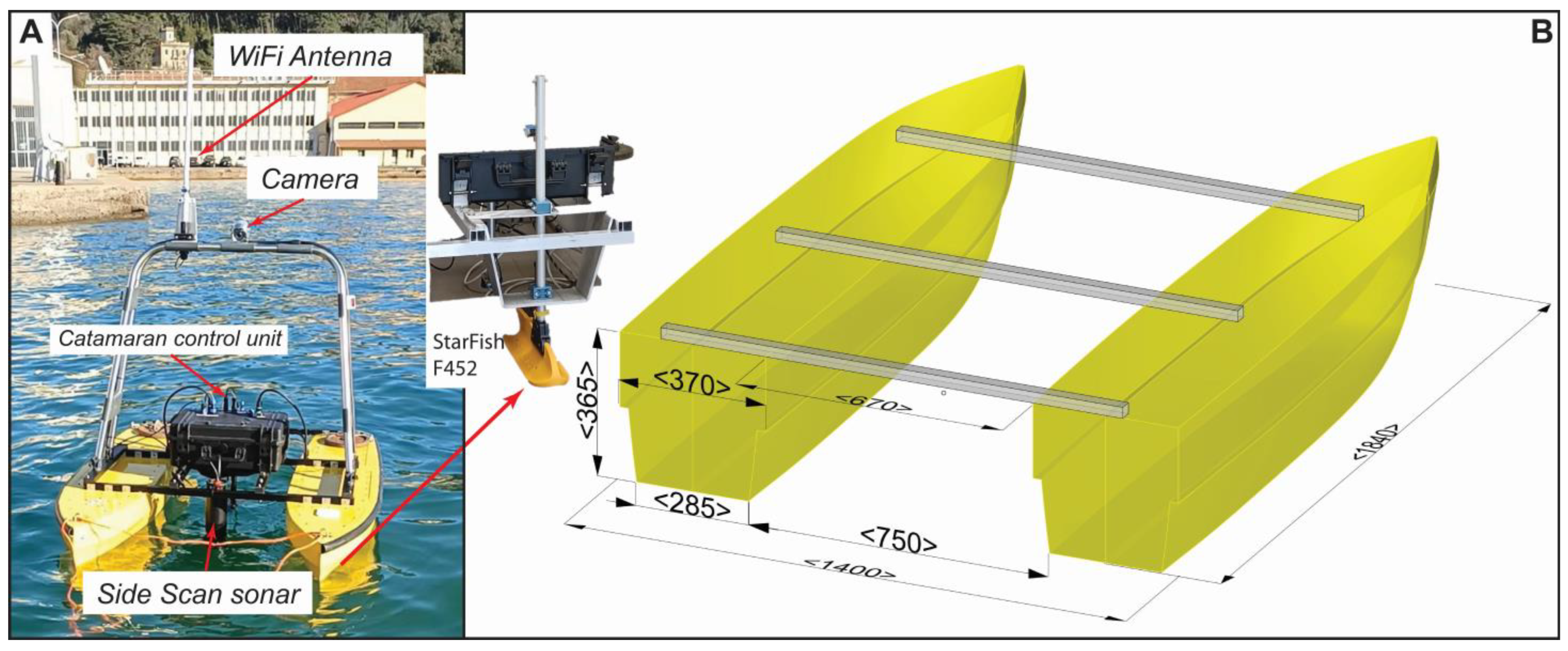
2.1. The Vessel Design
2.2. System Overview
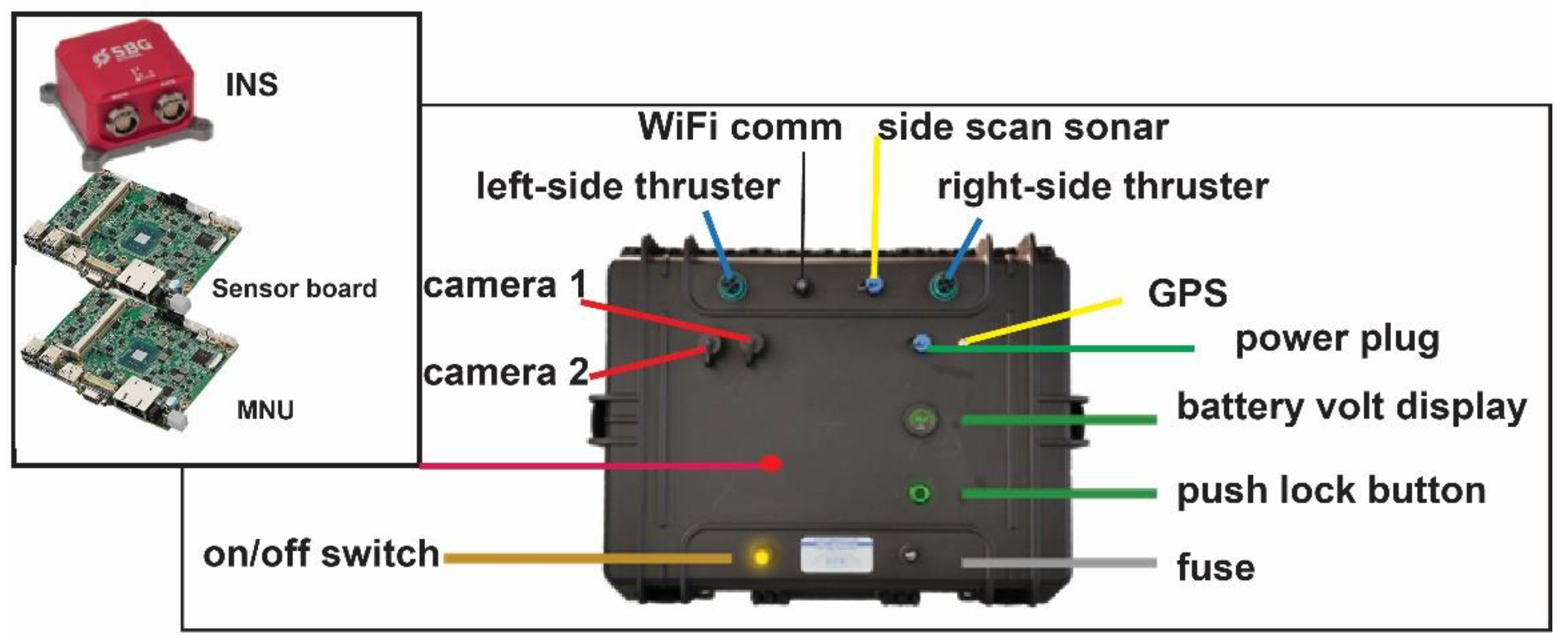
2.2.1. Command and Control Subsystem
- MNU board.
- SB.
- INS coupled to a GPS receiver.
- Ethernet switch.
- Thruster controllers.
- Opto Isolator boards and battery measurement system.
- 24 V LiFePO4 16 Ah.
- Upon power-up, the system enters “initializing status”, during which the unit activates a short-range 2.4 GHz Wi-Fi access point, enabling direct access to the MNU and SB for data download and/or upload of custom configuration. After approximately 5 min, if there is no active connection from other devices, the short-range link is disabled as part of the battery management system. The waterproof case contains the primary electronics, including an Ethernet switch, the INS, and the two motherboards, MNU and SB. The electronics and motherboards are powered by a secondary battery pack (24 V 16 Ah), separated from the main power source used for propulsion. This setup allows the maximum energy supply to be dedicated to the individual systems, thereby avoiding mutual interference.
2.2.2. Scientific Sensors Payload
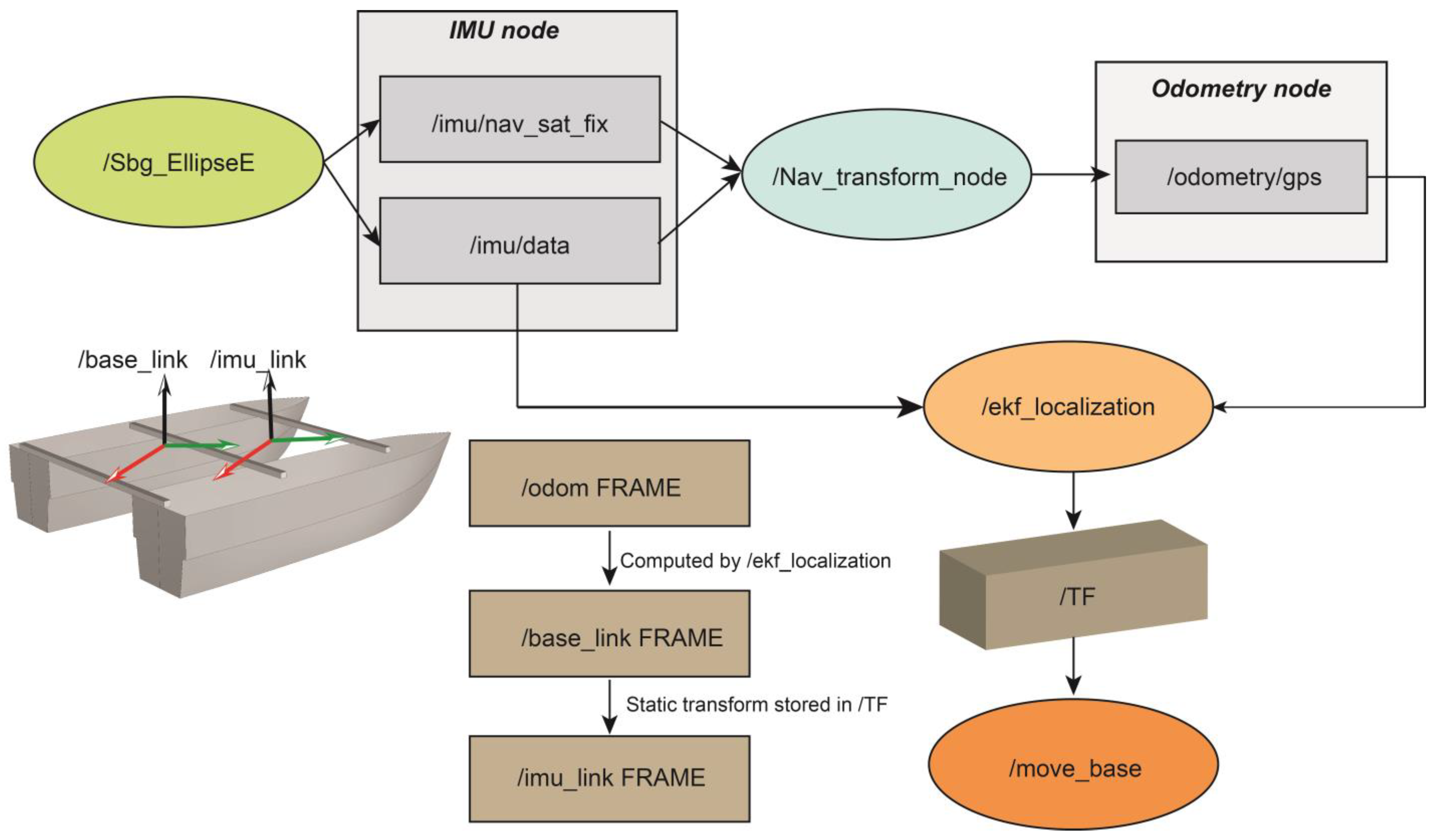
2.3. Software Implementation
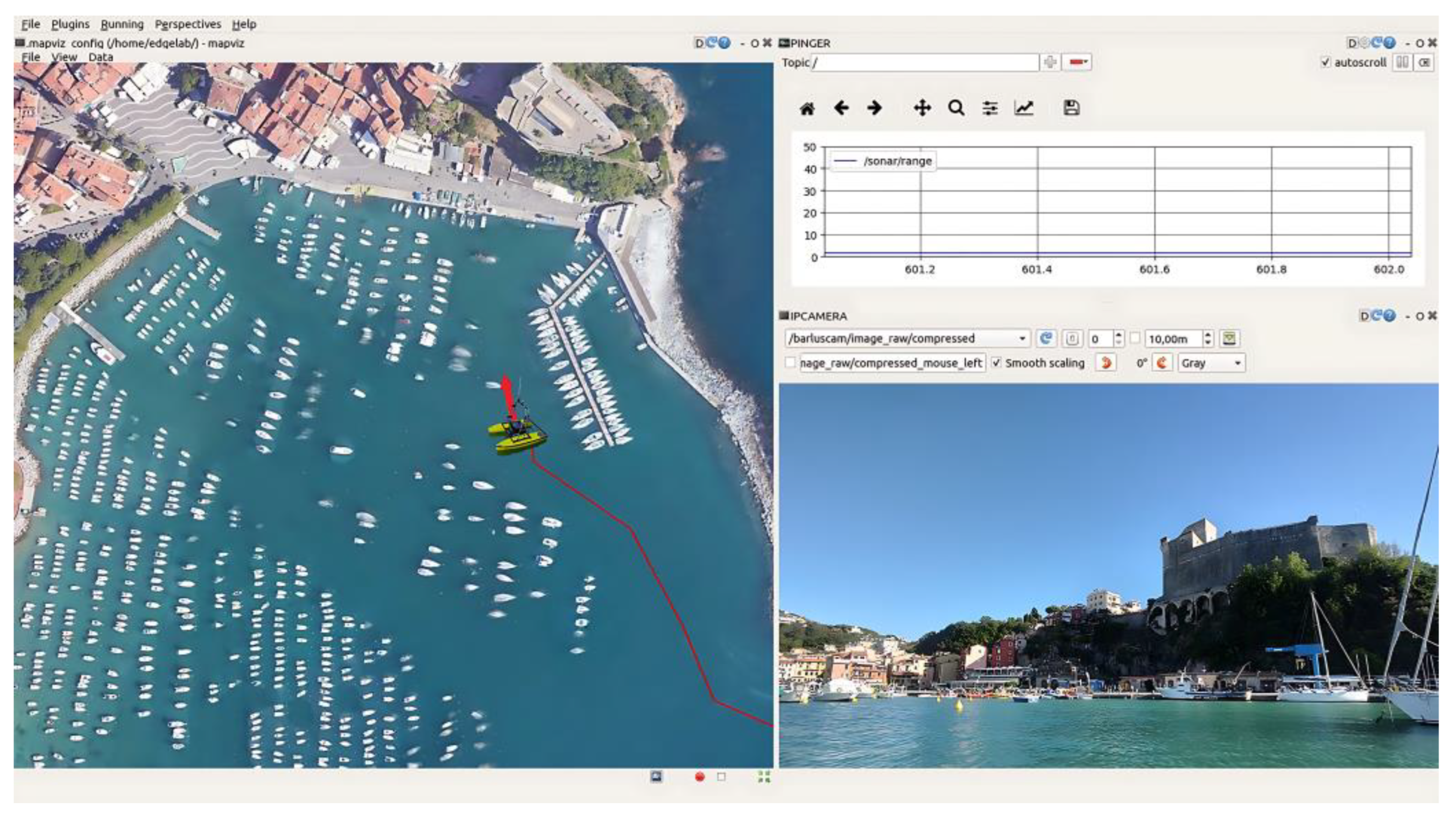
2.4. Communication System and Ground Control Unit
3. Results
- (1)
- Converting binary property files recorded by the Starfish Scanline acquisition software into XTF (Extended Triton Format) files, which are readable by Hips and Sips software.
- (2)
- Georeferencing the various track lines composing the survey and correcting the navigation by removing intervening spikes and portions of the line affected by high acoustic noise (e.g., turning points).
- (3)
- Applying the sonar imagery correction creating a beam pattern. This is unique and computed for each survey, and it introduces an across-track bias that needs to be removed from the imagery.
- (4)
- Checking the imagery along the tracks and adjusting the gain and colour palette. During this step, high-noise portions of soundings can be removed. Additionally, selected data can be corrected by applying despeckle filtering. This algorithm estimates the acoustic intensity inside a 3 × 3 pixels moving windows, replacing that value with the average of the surrounding pixels.
- (5)
- Creating the mosaic for the entire survey. The individual sonar images acquired along the track lines are then merged together using a weighted average blending filter.
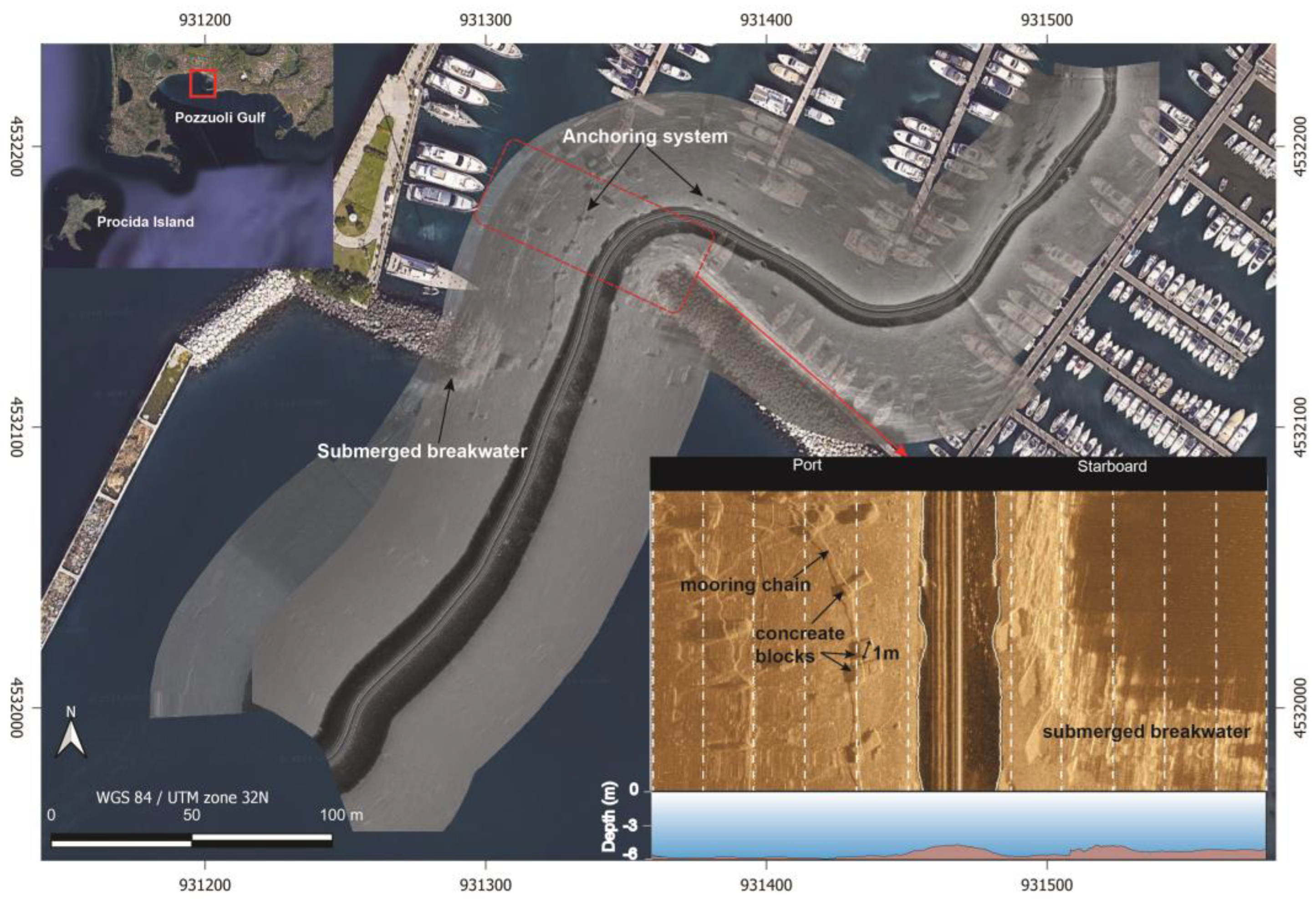
3.1. Pozzuoli Harbour
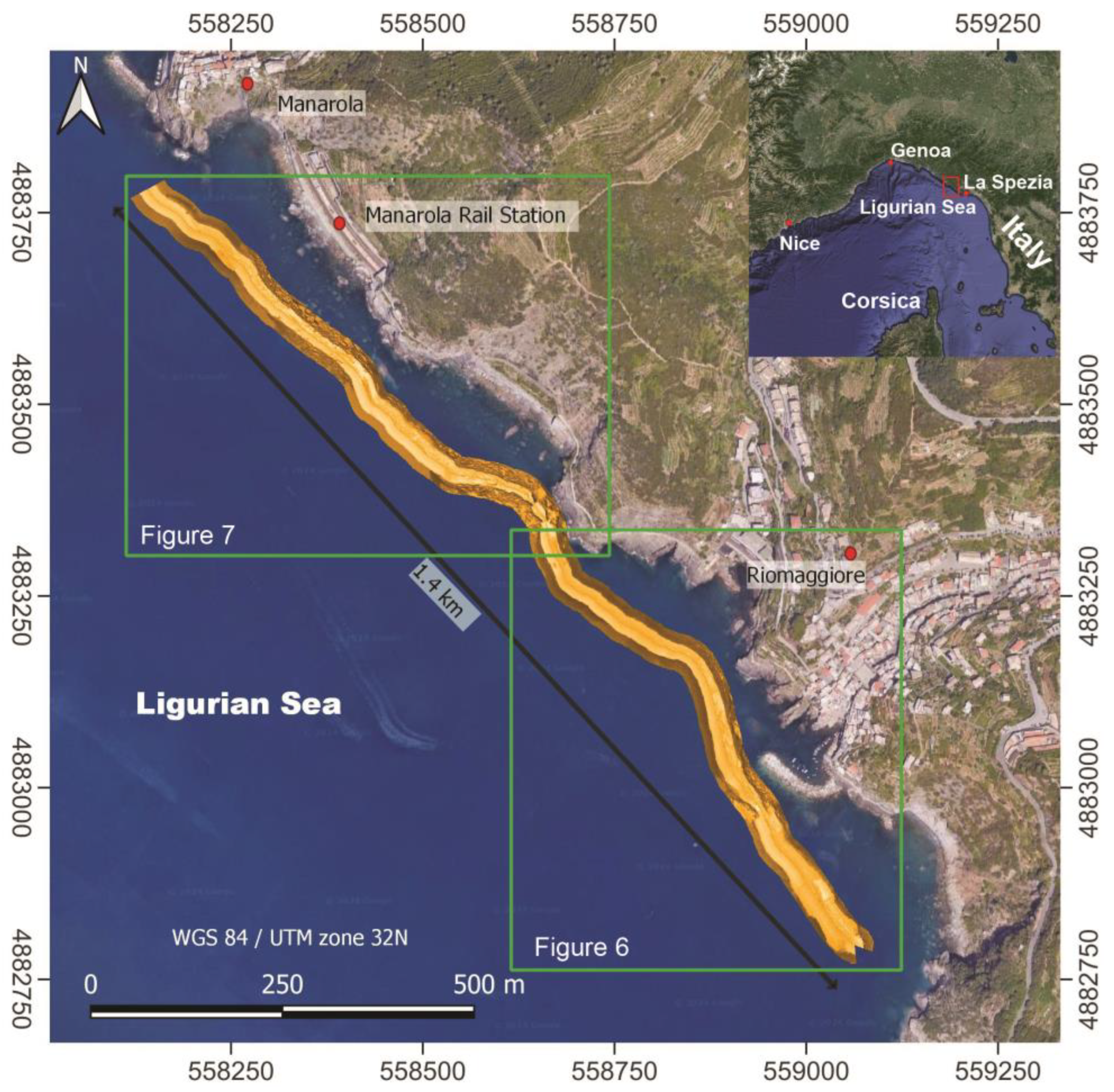
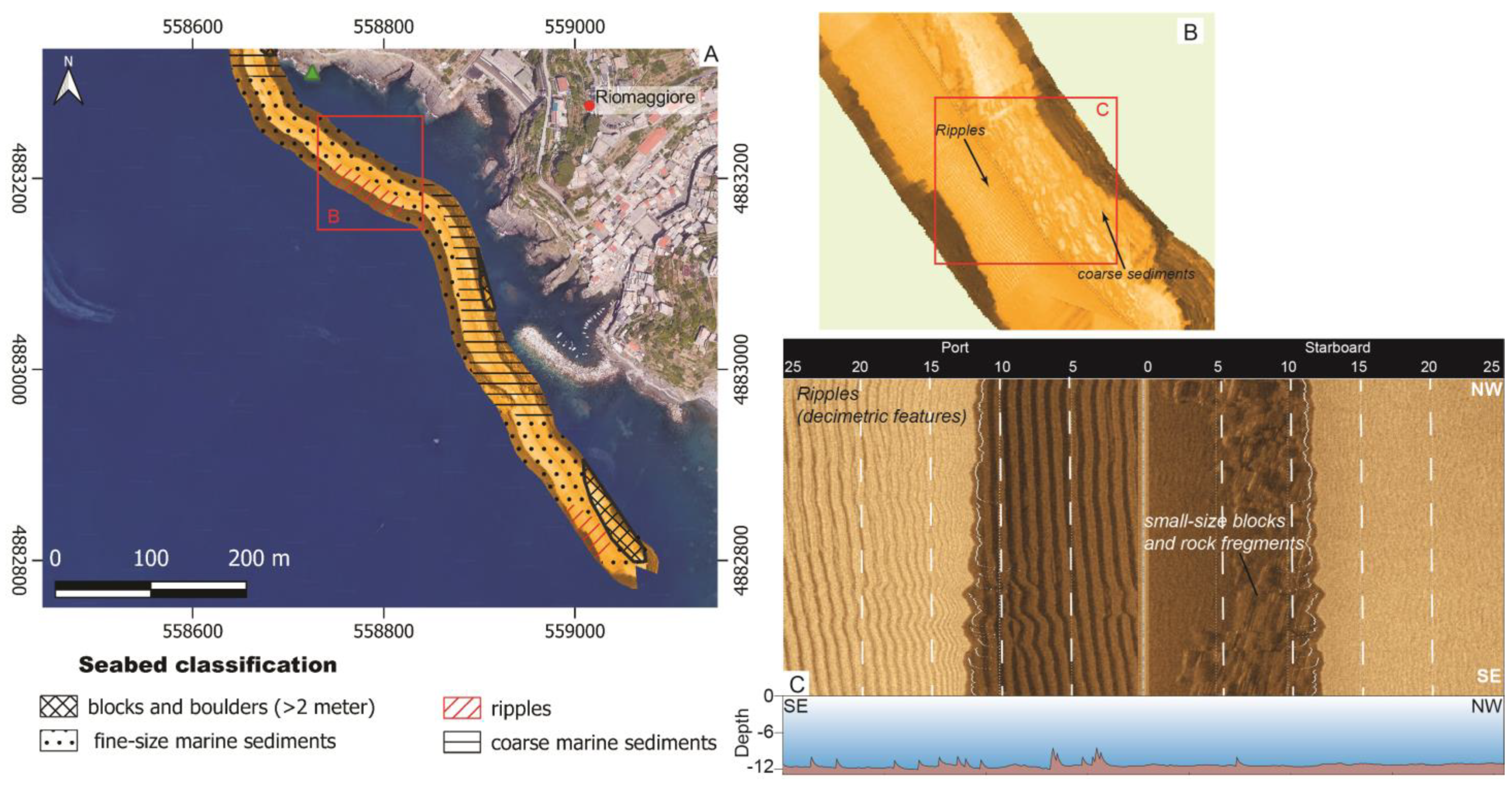
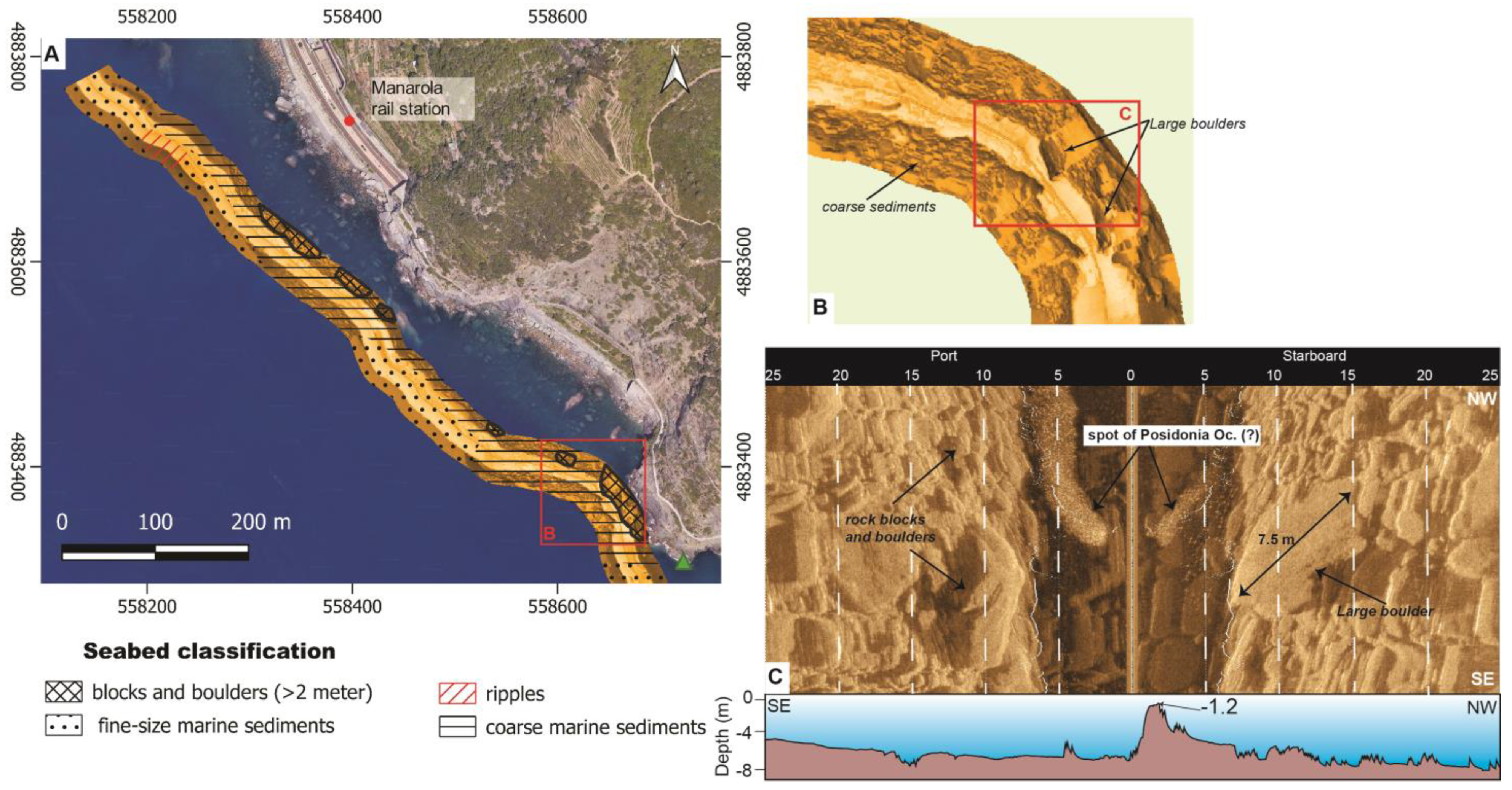
3.2. Riomaggiore Site
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, L.; Abraham, J.; Trenberth, K.E.; Fasullo, J.; Boyer, T.; Locarnini, R.; Zhang, B.; Yu, F.; Wan, L.; Chen, X.; et al. Upper Ocean Temperatures Hit Record High in 2020. Adv. Atmos. Sci. 2021, 38, 523–530. [Google Scholar] [CrossRef]
- Schroeder, K.; Chiggiato, J.; Bryden, H.L.; Borghini, M.; Ben Ismail, S. Abrupt Climate Shift in the Western Mediterranean Sea. Sci. Rep. 2016, 6, 23009. [Google Scholar] [CrossRef] [PubMed]
- Cramer, W.; Guiot, J.; Fader, M.; Garrabou, J.; Gattuso, J.-P.; Iglesias, A.; Lange, M.A.; Lionello, P.; Llasat, M.C.; Paz, S.; et al. Climate Change and Interconnected Risks to Sustainable Development in the Mediterranean. Nat. Clim. Change 2018, 8, 972–980. [Google Scholar] [CrossRef]
- Garrabou, J.; Gómez-Gras, D.; Medrano, A.; Cerrano, C.; Ponti, M.; Schlegel, R.; Bensoussan, N.; Turicchia, E.; Sini, M.; Gerovasileiou, V.; et al. Marine Heatwaves Drive Recurrent Mass Mortalities in the Mediterranean Sea. Glob. Change Biol. 2022, 28, 5708–5725. [Google Scholar] [CrossRef] [PubMed]
- Blondel, P. The Handbook of Sidescan Sonar; Springer: Berlin/Heidelberg, Germany, 2009; ISBN 978-3-540-49886-5. [Google Scholar]
- Giordano, F.; Mattei, G.; Parente, C.; Peluso, F.; Santamaria, R. Integrating Sensors into a Marine Drone for Bathymetric 3D Surveys in Shallow Waters. Sensors 2015, 16, 41. [Google Scholar] [CrossRef] [PubMed]
- Hwang, J.; Bose, N.; Fan, S. AUV Adaptive Sampling Methods: A Review. Appl. Sci. 2019, 9, 3145. [Google Scholar] [CrossRef]
- Chadwick, W.W.; Rubin, K.H.; Merle, S.G.; Bobbitt, A.M.; Kwasnitschka, T.; Embley, R.W. Recent Eruptions between 2012 and 2018 Discovered at West Mata Submarine Volcano (NE Lau Basin, SW Pacific) and Characterized by New Ship, AUV, and ROV Data. Front. Mar. Sci. 2019, 6, 495. [Google Scholar] [CrossRef]
- Stanghellini, G.; Del Bianco, F.; Gasperini, L. OpenSWAP, an Open Architecture, Low Cost Class of Autonomous Surface Vehicles for Geophysical Surveys in the Shallow Water Environment. Remote Sens. 2020, 12, 2575. [Google Scholar] [CrossRef]
- Orthmann, A.; Ziegwied, A. The Force Multiplier Effect Using Autonomous Surface Vessels for Hydrographic Survey in the Arctic. In Proceedings of the OCEANS 2017, Anchorage, AK, USA, 18–21 September 2017; pp. 1–4. [Google Scholar]
- Gentemann, C.L.; Scott, J.P.; Mazzini, P.L.F.; Pianca, C.; Akella, S.; Minnett, P.J.; Cornillon, P.; Fox-Kemper, B.; Cetinić, I.; Chin, T.M.; et al. Saildrone: Adaptively Sampling the Marine Environment. Bull. Am. Meteorol. Soc. 2020, 101, E744–E762. [Google Scholar] [CrossRef]
- Millar, D. The Importance of Seafloor Mapping to the New Blue Economy. In Preparing a Workforce for the New Blue Economy; Elsevier: Amsterdam, The Netherlands, 2021; pp. 323–332. ISBN 978-0-12-821431-2. [Google Scholar]
- Bailey, D. The NPL High Speed Round Bilge Displacement Hull Series; Maritime Technology Monograph; The Royal Institution of Naval Architects: London, UK, 1976; Volume 4. [Google Scholar]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An Open-Source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009; Volume 3, p. 5. [Google Scholar]
- Quigley, M.; Gerkey, B.; Smart, W.D. Programming Robots with ROS: A Practical Introduction to the Robot Operating System; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2015. [Google Scholar]
- Agnoletti, M.; Errico, A.; Santoro, A.; Dani, A.; Preti, F. Terraced Landscapes and Hydrogeological Risk. Effects of Land Abandonment in Cinque Terre (Italy) during Severe Rainfall Events. Sustainability 2019, 11, 235. [Google Scholar] [CrossRef]
- Giordan, D.; Cignetti, M.; Godone, D.; Peruccacci, S.; Raso, E.; Pepe, G.; Calcaterra, D.; Cevasco, A.; Firpo, M.; Scarpellini, P.; et al. A New Procedure for an Effective Management of Geo-Hydrological Risks across the “Sentiero Verde-Azzurro” Trail, Cinque Terre National Park, Liguria (North-Western Italy). Sustainability 2020, 12, 561. [Google Scholar] [CrossRef]
- Shirvani Dastgerdi, A.; Sargolini, M.; Broussard Allred, S.; Chatrchyan, A.M.; Drescher, M.; DeGeer, C. Climate Change Risk Reduction in Cultural Landscapes: Insights from Cinque Terre and Waterloo. Land. Use Policy 2022, 123, 106359. [Google Scholar] [CrossRef]
- Cevasco, A.; Brandolini, P.; Scopesi, C.; Rellini, I. Relationships between Geo-Hydrological Processes Induced by Heavy Rainfall and Land-Use: The Case of 25 October 2011 in the Vernazza Catchment (Cinque Terre, NW Italy). J. Maps 2013, 9, 289–298. [Google Scholar] [CrossRef]
- De Stefanis, A.; Marini, M.; Terranova, R.; De Luigi, G. I Movimenti Franosi Di Guvano e Rodalabia Nelle Cinque Terre Ei Loro Riflessi Sulla Morfologia Della Costa Ligure e Sugli Insediamenti. Mem. Soc. Geol. Ital. 1978, 19, 161–167. [Google Scholar]
- Abbate, E. Geologia Delle Cinque Terre e Dell’entroterra Di Levanto (Liguria Orientale); Arti Grafiche Pacini Mariotti: Pisa, Italy, 1969. [Google Scholar]
- Terranova, R.; Zanzucchi, G.; Bernini, M.; Brandolini, P.; Campobasso, S.; Faccini, F.; Zanzucchi, F. Geologia, Geomorfologia e Vini Del Parco Nazionale Delle Cinque Terre (Liguria, Italia). Boll. Della Soc. Geol. Ital. Spec. 2006, 6, 115–128. [Google Scholar]
- Raso, E.; Mandarino, A.; Pepe, G.; Calcaterra, D.; Cevasco, A.; Confuorto, P.; Di Napoli, M.; Firpo, M. Geomorphology of Cinque Terre National Park (Italy). J. Maps 2021, 17, 171–184. [Google Scholar] [CrossRef]
- Gianmarino, S.; Giglia, G. Gli Elementi Strutturali Della Piega Di La Spezia Nel Contesto Geodinamico Dell’Appennino Settentrionale. Boll. Della Soc. Geol. Ital. 1990, 109, 683–692. [Google Scholar]
- Raso, E.; Faccini, F.; Brandolini, P.; Firpo, M. The Lovers’ Lane (“Via Dell’Amore”) Rockfall Events: A History of Dangerous Collapses. In Proceedings of the ISRM EUROCK, Cappadocia, Turkey, 29–31 August 2016. [Google Scholar]
- Micheli, C.; D’Esposito, D.; Belmonte, A.; Peirano, A.; Valiante, L.M.; Procaccini, G. Genetic Diversity and Structure in Two Protected Posidonia Oceanica Meadows. Mar. Environ. Res. 2015, 109, 124–131. [Google Scholar] [CrossRef] [PubMed]
- Mattei, G.; Aucelli, P.P.C.; Ciaramella, A.; De Luca, L.; Greco, A.; Mellone, G.; Peluso, F.; Troisi, S.; Pappone, G. Multi-Method Technics and Deep Neural Networks Tools on Board ARGO USV for the Geoarchaeological and Geomorphological Mapping of Coastal Areas: The Case of Puteoli Roman Harbour. Sensors 2024, 24, 1090. [Google Scholar] [CrossRef] [PubMed]
- Makar, A. Coastal Bathymetric Sounding in Very Shallow Water Using USV: Study of Public Beach in Gdynia, Poland. Sensors 2023, 23, 4215. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length overall (LOA) | 1840 mm |
| Width of a single hull | 370 mm |
| breadth overall (BOA) | 1400 mm |
| Draft | 180 mm |
| Weight of the hulls | 60 kg |
| Total displacement | 115 kg |
| Propulsion | 2 × brushless thrusters, 12 V (205 W) |
| Maximum speed | 5 knots |
| Autonomy | 8 h (average speed: 3 knots) |
| Power supply (propulsion) | 2 × 12 V 180 Ah 2160 Wh |
| Addition of power supply (main electronics and sensors) | 1× lithium, 24 V, 16 Amp/h |
| Communication | Point-to-point 2.4/5 GHz Wi-Fi and/or 4G LTE |
| Camera | 2× IP Camera (Barlus, Shenzen, China ) |
| Side scan sonar | Starfish 452F (Blueprint Subsea, Ulverston, UK )–450 KHz nominal frequency |
| Single echo-sounder | Blue Robotics Ping Sonar, measurement range: 50 m |
| Navigation system | INS–SBG Ellipse-E with external GPS antenna |
| Velocity (Knt) | Rt (N) | Pe (W) |
|---|---|---|
| 0.5 | 0.727 | 0.221 |
| 1 | 1.949 | 1.004 |
| 1.5 | 8.496 | 6.973 |
| 2 | 12.827 | 13.196 |
| 2.5 | 19.512 | 25.946 |
| 3 | 27,521 | 42,472 |
| 3.5 | 37,208 | 68,142 |
| 4 | 79,931 | 164,477 |
| 4.5 | 126,062 | 295,373 |
| 5 | 147.166 | 378.536 |
| 5.5 | 156.979 | 448.695 |
| 6 | 162.408 | 501.295 |
| 6.5 | 162.327 | 547.453 |
| 7 | 166.597 | 599.926 |
| Specification | Main Navigation Unit (MNU) | Sensor Board (SB) |
|---|---|---|
| Model | MIO 5251J-U0A1E (Advantech Ltd., Taiwan) | RCO-1010 |
| CPU | Intel Celeron J1900 2 GHz (Quad-Core) | Intel Celeron J1900 4C |
| RAM | 8 GB DDR3L, 1333 MHz | 8 GB DDR3 1600 MHz |
| I/O interfaces | RS-232/485/422, USB3.0, I2C, SMBus, GPIO, Ethernet | RS-232/484/422, USB3.0, Ethernet |
| Power | Single 12 V DC power input | 9–48 VDC |
| Power consumption | 0.62 A @12 V (7.44 W) | 0.62 A @12 V (7.44 W) |
| Dimensions (L × W × H) | 146 × 102 × 19 mm | 150 × 49 × 105 |
| Weight | 0.5 kg | 0.8 kg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cocchi, L.; Muccini, F.; Locritani, M.; Spinelli, L.; Cocco, M. CORAL—Catamaran for Underwater Exploration: Development of a Multipurpose Unmanned Surface Vessel for Environmental Studies. Sensors 2024, 24, 4544. https://doi.org/10.3390/s24144544
Cocchi L, Muccini F, Locritani M, Spinelli L, Cocco M. CORAL—Catamaran for Underwater Exploration: Development of a Multipurpose Unmanned Surface Vessel for Environmental Studies. Sensors. 2024; 24(14):4544. https://doi.org/10.3390/s24144544
Chicago/Turabian StyleCocchi, Luca, Filippo Muccini, Marina Locritani, Leonardo Spinelli, and Michele Cocco. 2024. "CORAL—Catamaran for Underwater Exploration: Development of a Multipurpose Unmanned Surface Vessel for Environmental Studies" Sensors 24, no. 14: 4544. https://doi.org/10.3390/s24144544