
Research on the Collision Risk of Fusion Operation of Manned Aircraft and Unmanned Aircraft at Zigong Airport
Abstract
:1. Introduction
2. Integration of Operational Collision Risk Models
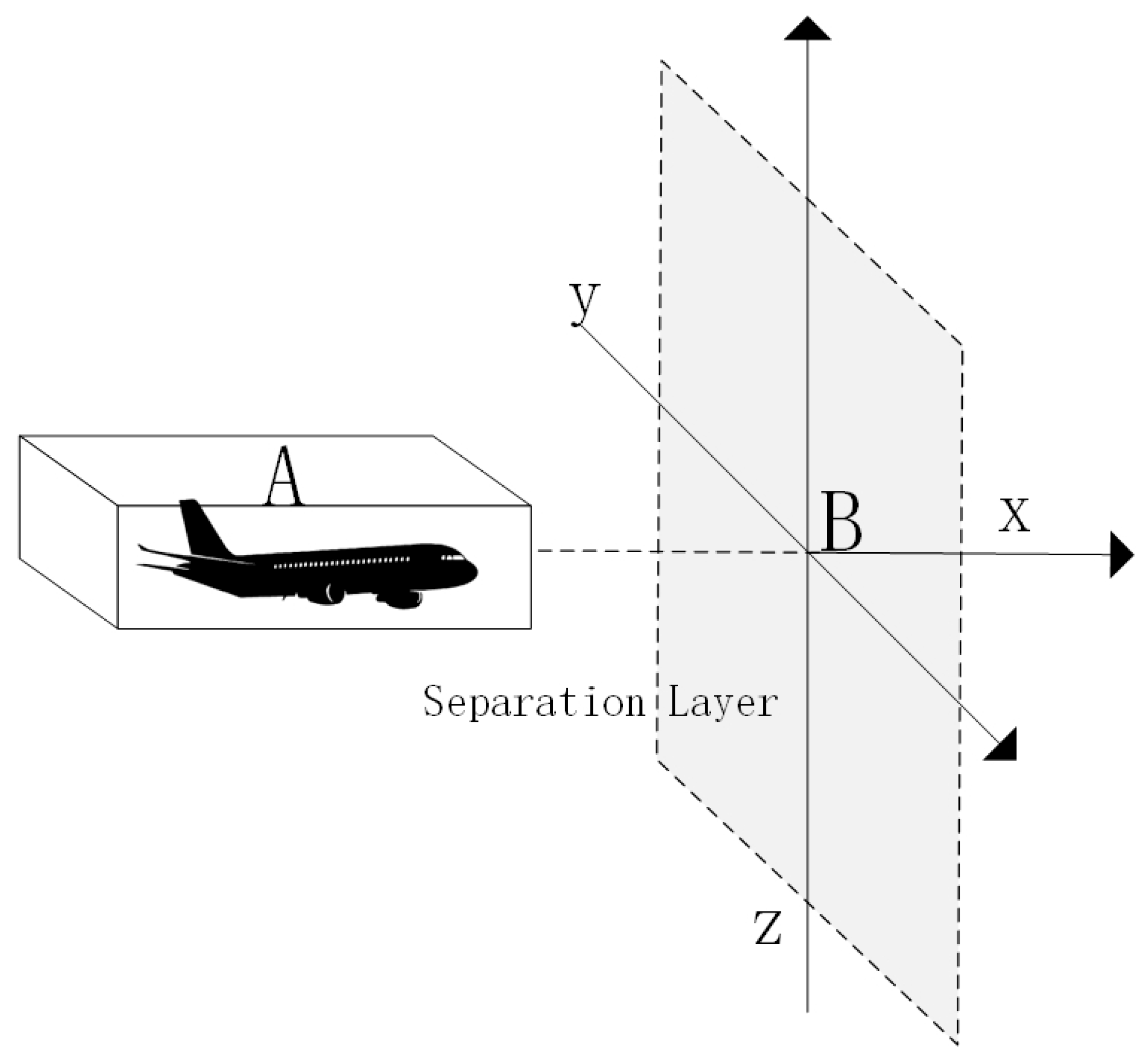
2.1. Event Crash Risk Model
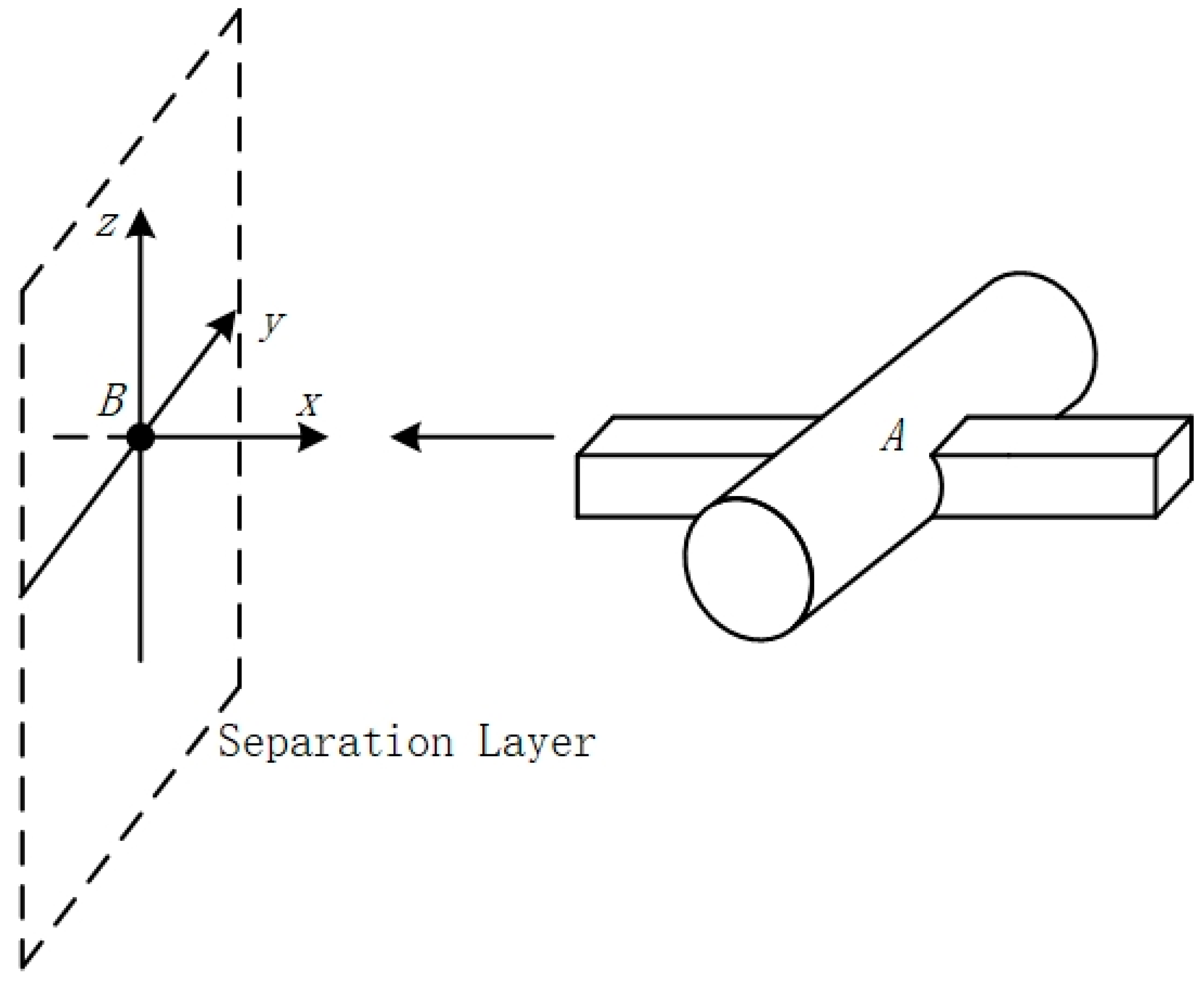
2.2. Improved Crash Risk Modeling
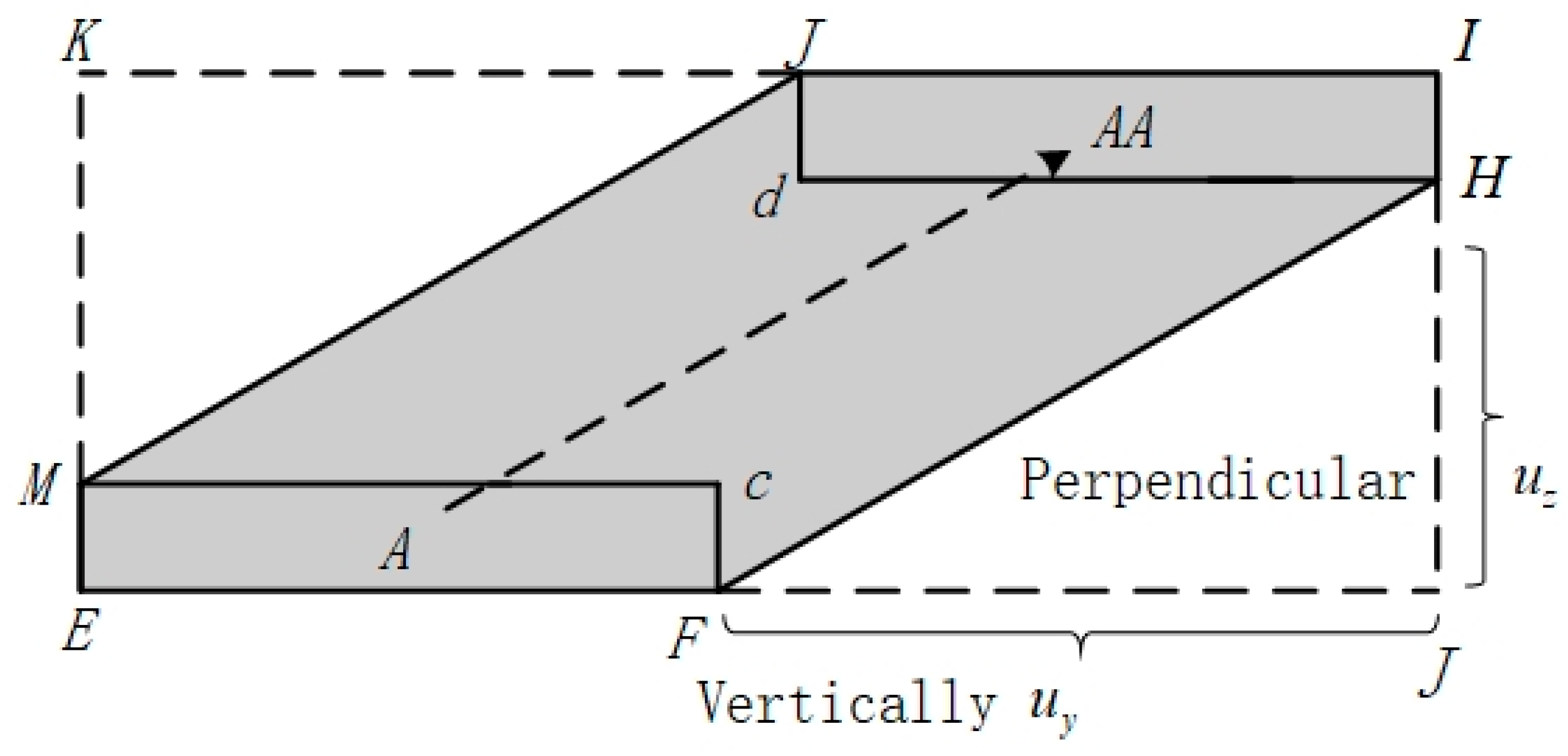
2.3. Error Safety Distance Margin
3. Error Analysis
3.1. Manned Aircraft Navigation Error Analysis
3.2. UAV Navigation Error Analysis
3.3. Wind Speed Error Analysis
4. Computing and Simulation
4.1. Example Calculations
- (1)
- This study is only a theoretical analysis and does not change the present operating regulations of the airport;
- (2)
- It is assumed that the error factors affecting the aircraft are independent of each other and do not interfere with each other;
- (3)
- The research scene of this paper is the fusion operation test area of Feng Ming Airport in Zigong, as shown in Figure 11.
4.2. Simulation Analysis
5. Conclusions
6. Outlook
- (1)
- Model: Future research can further expand the scope of application of models and consider more types of fusion operation scenarios of manned and unmanned aircraft. In particular, as technology evolves and new UAV designs emerge, research could focus on the performance of these new models in fusion operations and their synergistic performance with traditional manned aircraft. In addition, the fusion of vehicles of different scales, speeds and missions could be considered to explore a wider range of fusion operation possibilities.
- (2)
- Model algorithms: Future research could further optimize the algorithms in the collision risk model to improve the accuracy and reliability of the model. For example, more complex navigation and wind speed positioning error models can be introduced to take into account the influence of more environmental factors to more realistically reflect the risk situation in fusion operation. At the same time, new data fusion techniques and machine learning methods can be explored to improve the generalization ability and applicability of the model by using more actual operational data for model training and validation.
- (3)
- Application scenarios: In addition to theoretical research and model algorithm optimization, future research can also focus on the application and validation of fusion operation in practical application scenarios. For example, in the fields of urban air traffic management, disaster rescue, and military combat, the advantages and challenges of the fusion operation of manned aircraft and UAVs can be explored, and corresponding solutions and policy recommendations can be put forward. At the same time, we can cooperate with partners in related fields to build experimental platforms and test bases to verify the effectiveness of new theories and algorithms, and to promote the practical application and popularization of fusion operation technology.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Yi, J.; Li, S.; Liu, H.; Zhong, G. A Review of Low Altitude Airspace Capacity Assessment Studies. jtysgcxb 2023, 23, 78–93. [Google Scholar] [CrossRef]
- Lu, Z.; Wu, Q.H.; Zhou, F.H. Algorithms for manned aircraft/unmanned aircraft intelligent cooperative target search and trajectory planning. J. Commun. 2024, 45, 31–40. [Google Scholar] [CrossRef]
- Zhang, C. Discussion on Legislation for Safety Management of Drones along High-speed Railways. Chin. J. Saf. Sci. 2020, 30, 38. [Google Scholar] [CrossRef]
- Barrado, C.; Boyero, M.; Brucculeri, L.; Ferrara, G.; Hately, A.; Hullah, P.; Martin-Marrero, D.; Pastor, E.; Rushton, A.P.; Volkert, A. U-Space Concept of Operations: A Key Enabler for Opening Airspace to Emerging Low-Altitude Operations. Aerospace 2020, 7, 24. [Google Scholar] [CrossRef]
- AL-Dosari, K.; Deif, A.M.; Kucukvar, M.; Onat, N.; Fetais, N. Security Supply Chain Using UAVs: Validation and Development of a UAV-Based Model for Qatar’s Mega Sporting Events. Drones 2023, 7, 555. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, Q.; Xu, J.; Li, D. A Review of UAV Power Line Inspection. In Proceedings of the Advances in Guidance, Navigation and Control, Tianjin, China, 23–25 October 2020; Yan, L., Duan, H., Yu, X., Eds.; Springer: Singapore, 2022; pp. 3147–3159. [Google Scholar]
- Hafeez, A.; Husain, M.A.; Singh, S.P.; Chauhan, A.; Khan, M.T.; Kumar, N.; Chauhan, A.; Soni, S.K. Implementation of Drone Technology for Farm Monitoring & Pesticide Spraying: A Review. Inf. Process. Agric. 2023, 10, 192–203. [Google Scholar] [CrossRef]
- Seidaliyeva, U.; Akhmetov, D.; Ilipbayeva, L.; Matson, E.T. Real-Time and Accurate Drone Detection in a Video with a Static Background. Sensors 2020, 20, 3856. [Google Scholar] [CrossRef] [PubMed]
- Sudhakar, S.; Vijayakumar, V.; Sathiya Kumar, C.; Priya, V.; Ravi, L.; Subramaniyaswamy, V. Unmanned Aerial Vehicle (UAV) Based Forest Fire Detection and Monitoring for Reducing False Alarms in Forest-Fires. Comput. Commun. 2020, 149, 1–16. [Google Scholar] [CrossRef]
- Ye, M.; Zhao, J.; Guan, Q.; Zhang, X. Research on eVTOL Air Route Network Planning Based on Improved A* Algorithm. Sustainability 2024, 16, 561. [Google Scholar] [CrossRef]
- Guan, X.; Lyu, R.; Shi, H.; Chen, J. A Survey of Safety Separation Management and Collision Avoidance Approaches of Civil UAS Operating in Integration National Airspace System. Chin. J. Aeronaut. 2020, 33, 2851–2863. [Google Scholar] [CrossRef]
- Liu, Z. A Study on the Collision Risk of Same Altitude Cross-Harbor Route Based on REICH Model. J. Shenzhen Univ. (Sci. Technol. Ed.) 2020, 37, 136–142. [Google Scholar]
- Chen, R.; Wang, Z.; Qiu, J.; Liu, R. Collision Risk Analysis of Aircraft Event Model Based on Improved Structure. Nav. Electron. Eng. 2023, 43, 89–93. [Google Scholar]
- Cui, X.; Li, X.; Han, Y.; Liu, Y. Research on Collision Risk of Large Unmanned Aerial Vehicle Operating in Fusion Airspace. In Proceedings of the International Conference on Electronic Information Technology (EIT 2022), Chengdu, China, 18–20 March 2022; SPIE: San Diego, CA, USA, 2022; Volume 12254, pp. 560–566. [Google Scholar]
- Wu, Y.; Li, X.; Kang, B. Research on Safety Control Technology for UAV along the Railway. In Proceedings of the Fourth International Conference on Computer Science and Communication Technology (ICCSCT 2023), Wuhan, China, 26–28 July 2023; SPIE: San Diego, CA, USA, 2023; Volume 12918, pp. 259–269. [Google Scholar]
- Brooker, P. Longitudinal Collision Risk for ATC Track Systems: A Hazardous Event Model. J. Navig. 2006, 59, 55–70. [Google Scholar] [CrossRef]
- Wang, L.; Yang, J. A Collision Risk Assessment Model for Small Unmanned Aircraft in Low Altitude Airspace Based on Random Distribution of Velocity. jtxxyaq 2022, 40, 64–70. [Google Scholar] [CrossRef]
- Wan, J.Q.; Zhao, Y.F. Longitudinal collision risk study based on CNS performance and human factors. Aerosp. Comput. Technol. 2017, 47, 34–37. [Google Scholar]
- Yang, Y.; Zhang, Y.; Wang, J. A probabilistic prediction method of air traffic controller error based on CREAM and Bayesian network. China Prod. Saf. Sci. Technol. 2020, 16, 37–43. [Google Scholar]
- Huang, S.; Teo, R.S.H.; Tan, K.K. Collision Avoidance of Multi Unmanned Aerial Vehicles: A Review. Annu. Rev. Control 2019, 48, 147–164. [Google Scholar] [CrossRef]
- Chen, Y.-Y.; Zhang, J.-P.; Zou, X.; Wu, Q.-G. Civilian UAV Traffic Management System Architecture and Key Technologies. Sci. Technol. Eng. 2021, 21, 13221–13237. [Google Scholar]
- Yu, Q.-Y.; Pan, W.-J. Study on the control interval of shared airspace for drones. Sci. Ind. 2018, 102–107. [Google Scholar] [CrossRef]
- Kallinen, V.; McFadyen, A. Collision Risk Modeling and Analysis for Lateral Separation to Support Unmanned Traffic Management. Risk Anal. 2022, 42, 854–881. [Google Scholar] [CrossRef]
- Figuet, B.; Monstein, R.; Waltert, M.; Morio, J. Data-Driven Mid-Air Collision Risk Modelling Using Extreme-Value Theory. Aerosp. Sci. Technol. 2023, 142, 108646. [Google Scholar] [CrossRef]
- Thomas, M.; Lemaitre, M.; Wilson, M.L.; Viboud, C.; Yordanov, Y.; Wackernagel, H.; Carrat, F. Applications of Extreme Value Theory in Public Health. PLoS ONE 2016, 11, e0159312. [Google Scholar] [CrossRef]
- Méndez, F.J.; Menéndez, M.; Luceño, A.; Losada, I.J. Estimation of the Long-Term Variability of Extreme Significant Wave Height Using a Time-Dependent Peak Over Threshold (POT) Model. J. Geophys. Res. Ocean 2006, 111, C07024. [Google Scholar] [CrossRef]
- Zhou, C.; Huang, C.; Huang, L.; Xie, C.; Zhu, X.; Huang, T. Research on Lateral Safety Spacing for Fusion Operation Based on Unmanned and Manned Aircraft-Event Modeling. Sensors 2024, 24, 553. [Google Scholar] [CrossRef] [PubMed]
- Zhong, G.; Du, S.; Zhang, H.; Zhou, J.; Liu, H. Demarcation Method of Safety Separations for sUAV Based on Collision Risk Estimation. Reliab. Eng. Syst. Saf. 2024, 242, 109738. [Google Scholar] [CrossRef]
- Yue, R.; Su, B.; Zhu, X.; Cao, Z. Vertical Collision Risk Study of Airway Flight Processes Based on Improved Event Model. Adv. Aeronaut. Eng. 2021, 13, 129–134. [Google Scholar]
- Zhou, C.; Hu, K.; Zhou, F.; Zhao, T.; Zhu, X.; Ouyang, F. Evaluation of Lateral Safety Distance of between UAVs in Hybrid Operation Mode Based on CNS Performance. In Proceedings of the 2022 2nd International Conference on Big Data Engineering and Education (BDEE), Chengdu, China, 5–7 August 2022; pp. 120–124. [Google Scholar]
- Li, Q.; Gan, X.S.; Sun, J.; Wang, M.H. Lateral collision risk assessment between military UAVs and civil flights. bjhkhtdxxb 2021, 47, 724–730. [Google Scholar] [CrossRef]
- Yang, S. Large UAV Collision Modeling Methodology. Ph.D. Thesis, Hebei University of Science and Technology, Shijiazhuang, China, 2019. [Google Scholar]
- Krasuski, K.; Wierzbicki, D. Monitoring Aircraft Position Using EGNOS Data for the SBAS APV Approach to the Landing Procedure. Sensors 2020, 20, 1945. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Li, Y.; Diao, M.; Gao, W.; Qi, Z. Performance Enhancement of INS/CNS Integration Navigation System Based on Particle Swarm Optimization Back Propagation Neural Network. Ocean Eng. 2015, 108, 33–45. [Google Scholar] [CrossRef]
- Fellner, A.; Konieczka, R. Rotorcraft in the Performance Based Navigation International Civil Aviation Organization Implementation. Trans. Aerosp. Res. 2019, 2019, 53–64. [Google Scholar] [CrossRef]
- Zhu, L.; Wang, J.; Wang, Y.; Ji, Y.; Ren, J. DRL-RNP: Deep Reinforcement Learning-Based Optimized RNP Flight Procedure Execution. Sensors 2022, 22, 6475. [Google Scholar] [CrossRef] [PubMed]
- Al-Turjman, F. A Novel Approach for Drones Positioning in Mission Critical Applications. Trans. Emerg. Telecommun. Technol. 2022, 33, e3603. [Google Scholar] [CrossRef]
- Grejner-Brzezinska, D.; Toth, C.; Yi, Y. On Improving Navigation Accuracy of GPS/INS Systems. Photogramm. Eng. Remote Sens. 2005, 71, 377–389. [Google Scholar] [CrossRef]
- Hernández-Romero, E.; Valenzuela, A.; Rivas, D. Probabilistic Multi-Aircraft Conflict Detection and Resolution Considering Wind Forecast Uncertainty. Aerosp. Sci. Technol. 2020, 105, 105973. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typology | Accurate (NM) | Scope of Application |
|---|---|---|
| RNP AR APCH | ≤0.3 NM | Allow for flexible routing |
| RNP1 | ±1 NM | Terminal area approach and departure RNP APCH start, intermediate, and re-flight phases |
| RNP2 | ±2 NM | Domestic land routes |
| RNP4 | ±4 NM | Oceans and remote continents |
| RNP12.6 | ±12.6 NM | Maritime airspace |
| RNP20 | ±20 NM | ATS providing minimum airspace traffic |
| Affiliated Units | Error Source | System Navigation Error (With SA) | System Navigation Error (Without SA) |
|---|---|---|---|
| Space segment | Satellite clock stability | 3.0 | 3.0 |
| Satellite perturbation determinability | 1.0 | 1.0 | |
| Select available (SA) | 32.3 | 0 | |
| Else | 0.5 | 0.5 | |
| Control section | Anticipated errors in the ephemeris | 4.2 | 4.2 |
| Other (Thrust performance) | 0.9 | 0.9 | |
| Ionospheric delay | 5.0 | 5.0 | |
| User section | Tropospheric delay | 1.5 | 1.5 |
| Receiver noise | 1.5 | 1.5 | |
| Multipath error | 2.5 | 2.5 | |
| Else | 0.5 | 0.5 | |
| System UERE | Total error | 33.3 | 8.0 |
| Table of Statistics on Sorties for the Year 023 | ||||
|---|---|---|---|---|
| Date | Total Number of Sorties | Total Time | Drone Sorties | Drone Time |
| 2023 | 46,094 | 23,127 | 638 | 1480 |
| Data | Secrecy Drone | Cessna 172 |
|---|---|---|
| Cruising speed | 220 km/h | 229 km/h |
| Presses | 3.3 m | 2.72 |
| Wingspan | 20 m | 11 m |
| Fuselage | 10 m | 8.28 m |
| Temp | 10 °C | 10 °C |
| Maximum flight altitude | 8000 m | 4267 m |
| Vertical proximity ratio | 0.61 | 0.61 |
| Vertical overlap probability | 0.5 | 0.5 |
| Lateral interval loss rate | ||
| Navigational error | 66.6 m | ≤1.852 km |
| Wind speed error | ≤3 m/s | ≤3 m/s |
| Data | Event Model | Improvements to the Event Model |
|---|---|---|
| 10 km | ||
| 9.5 km | ||
| 9 km | ||
| 8.5 km | ||
| 8 km |
| Safety Distance | Error Condition |
|---|---|
| 10 km | Error-free |
| 8 km | Various factors error |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, L.; Huang, C.; Zhou, C.; Xie, C.; Zhao, Z.; Huang, T. Research on the Collision Risk of Fusion Operation of Manned Aircraft and Unmanned Aircraft at Zigong Airport. Sensors 2024, 24, 4842. https://doi.org/10.3390/s24154842
Huang L, Huang C, Zhou C, Xie C, Zhao Z, Huang T. Research on the Collision Risk of Fusion Operation of Manned Aircraft and Unmanned Aircraft at Zigong Airport. Sensors. 2024; 24(15):4842. https://doi.org/10.3390/s24154842
Chicago/Turabian StyleHuang, Longyang, Chi Huang, Chao Zhou, Chuanjiang Xie, Zerong Zhao, and Tao Huang. 2024. "Research on the Collision Risk of Fusion Operation of Manned Aircraft and Unmanned Aircraft at Zigong Airport" Sensors 24, no. 15: 4842. https://doi.org/10.3390/s24154842