
Robotic Grasping of Unknown Objects Based on Deep Learning-Based Feature Detection

Abstract
1. Introduction
2. Methodology
2.1. Architecture
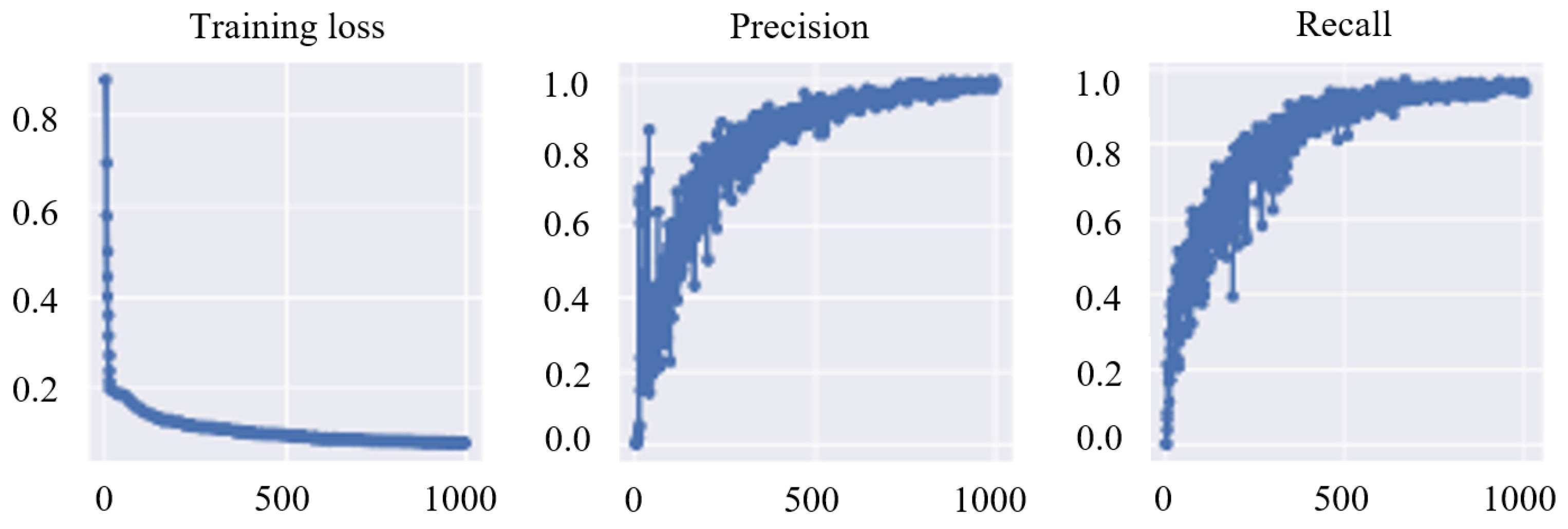
2.2. Feature Learning
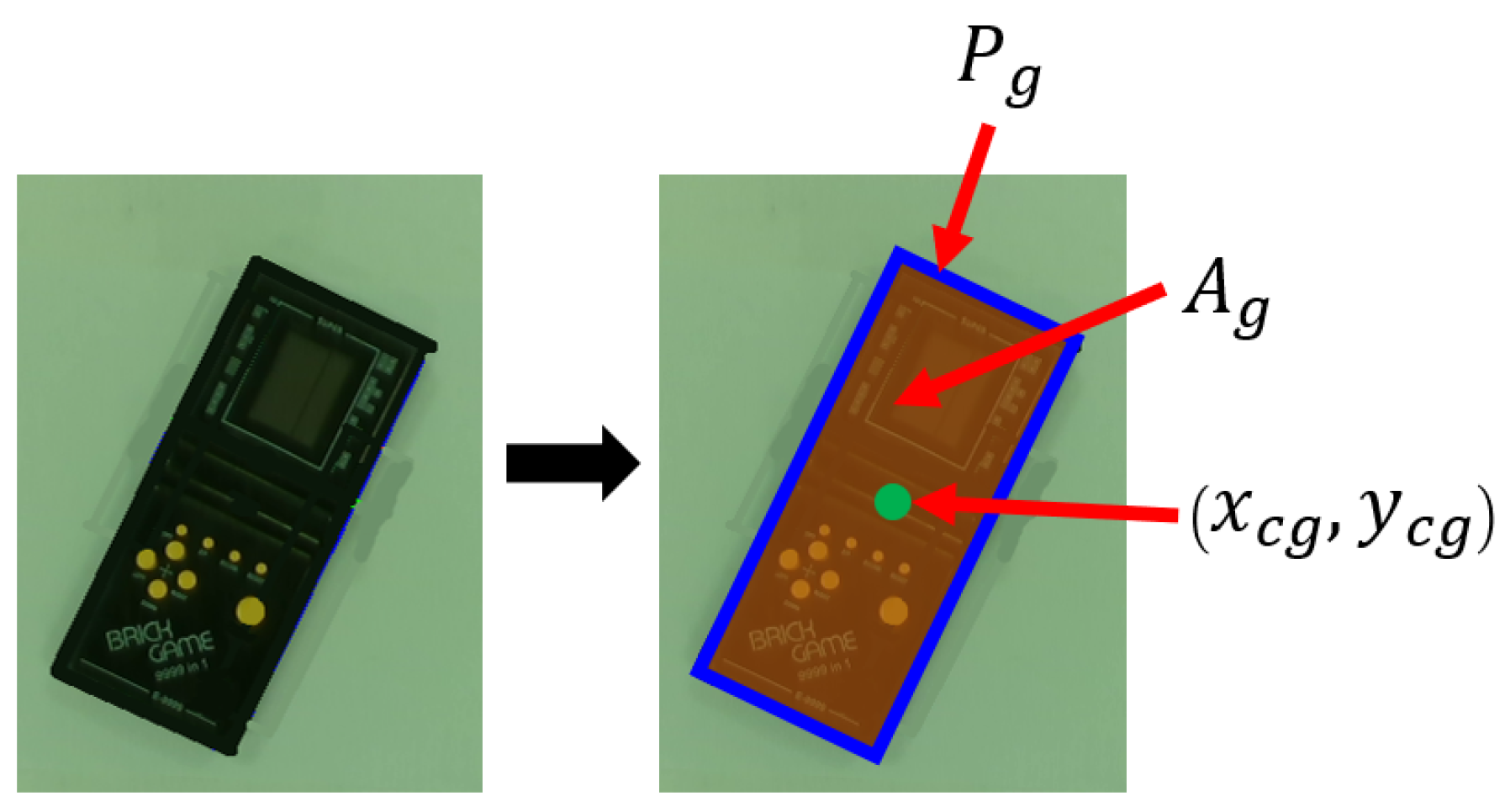
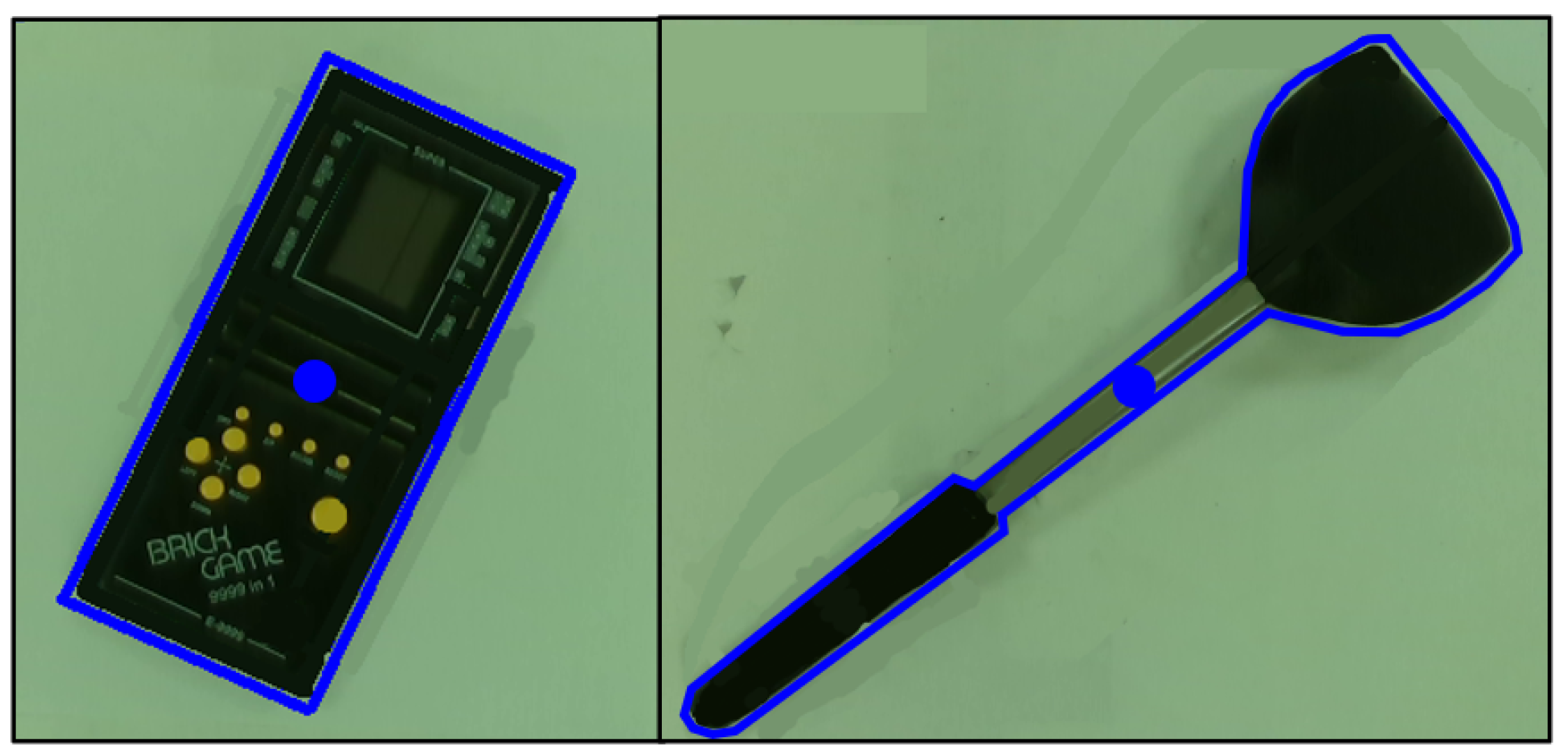
2.3. Abstract Shape Determination and Image Segmentation
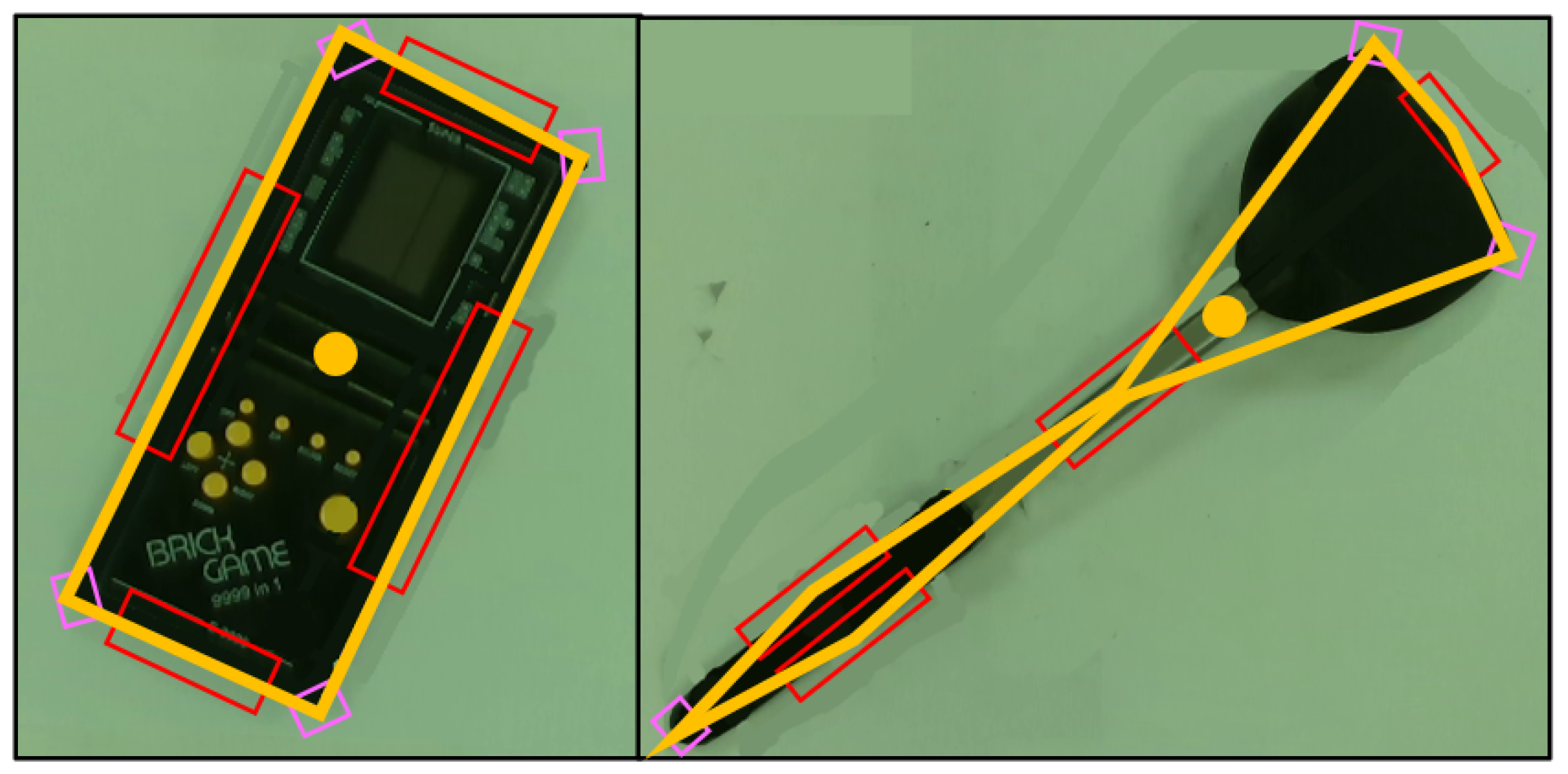
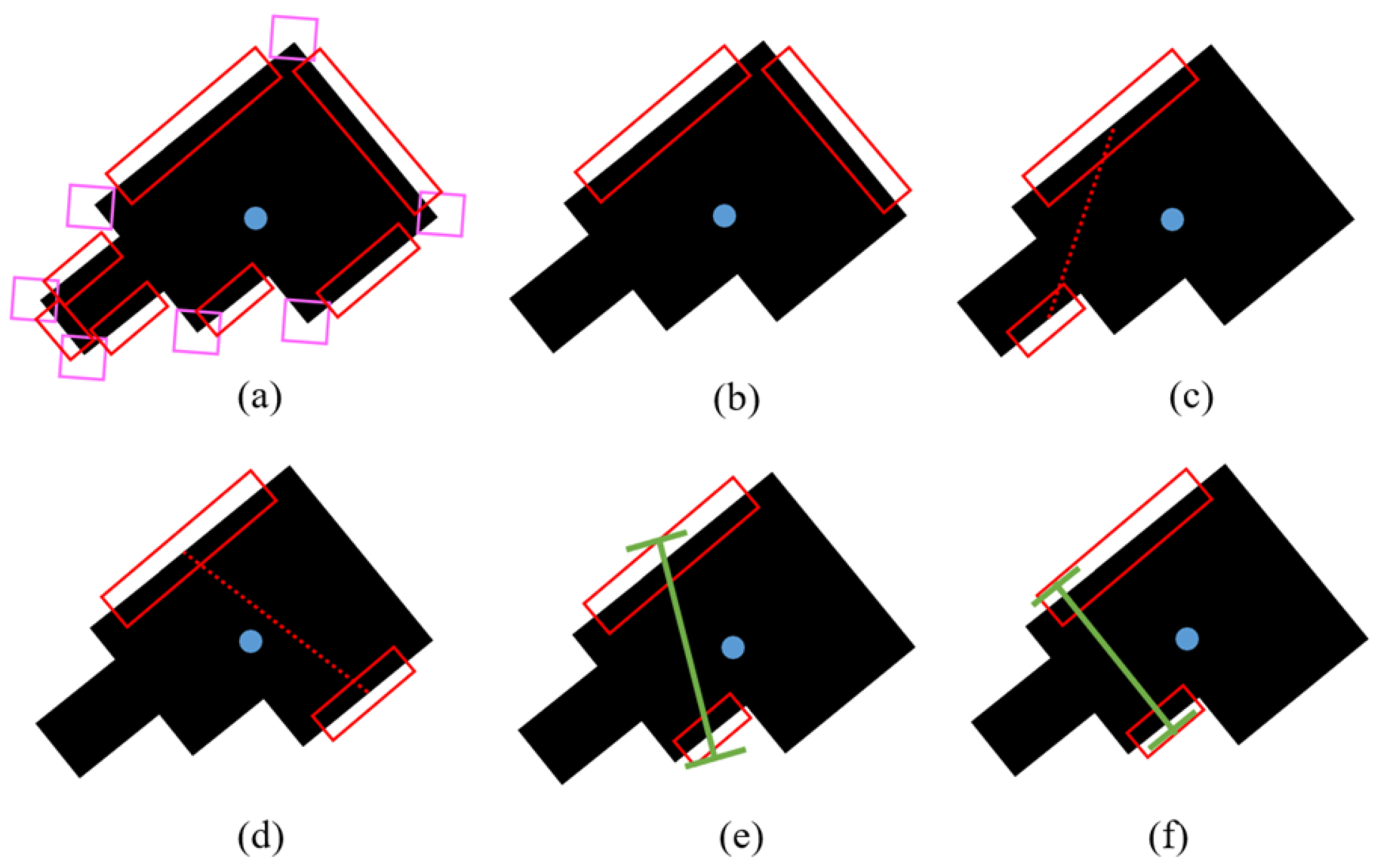
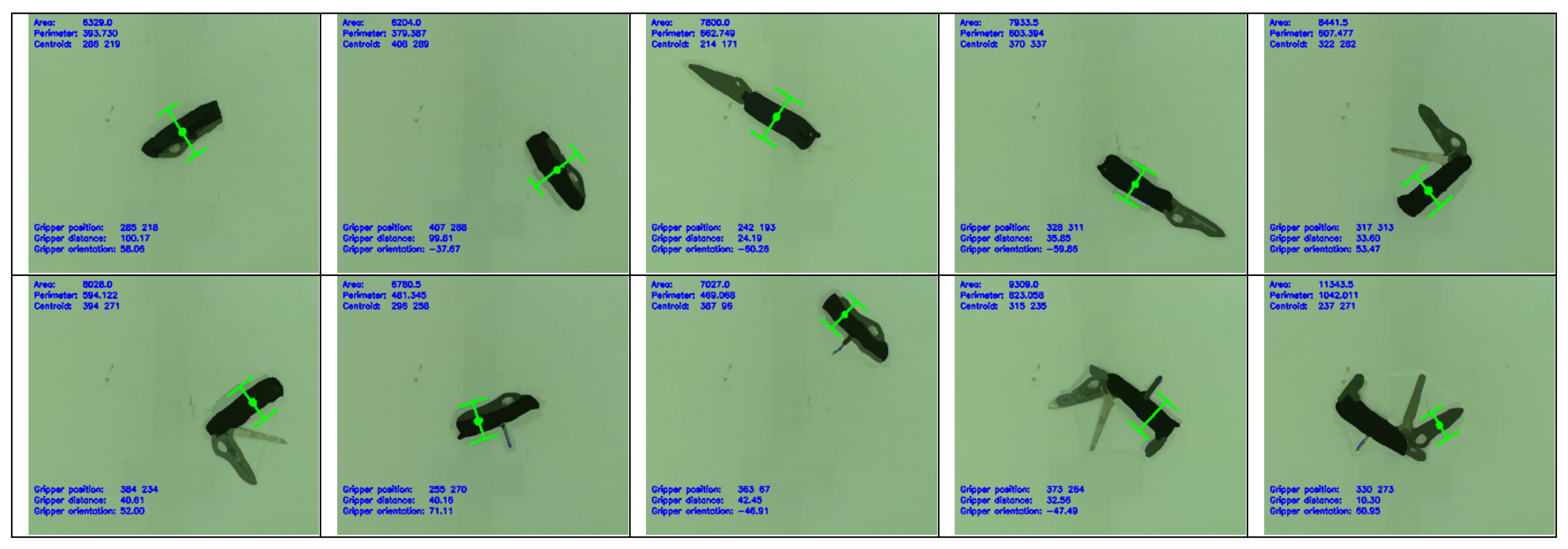
2.4. Determination of Grasp Position from Parallel Edges
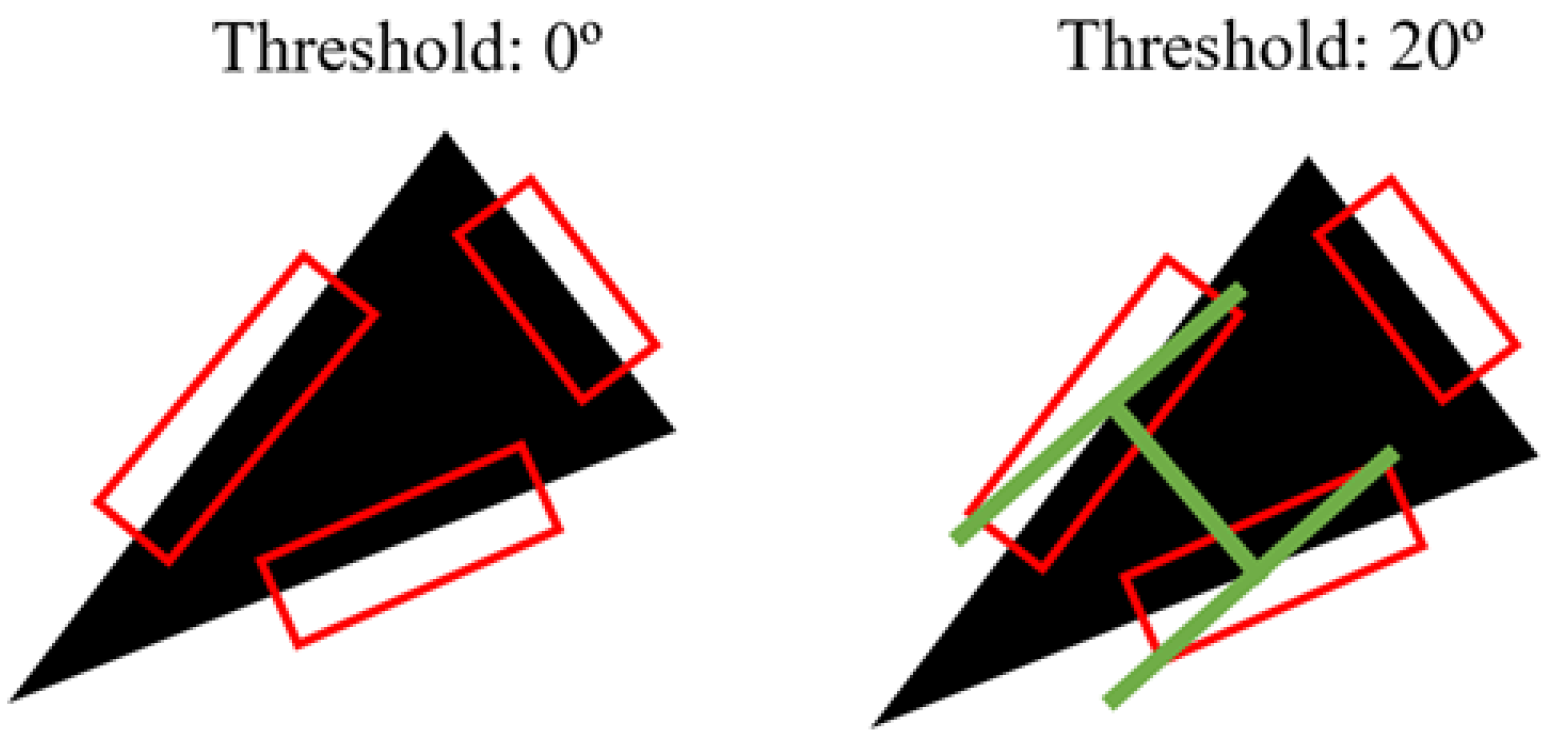
2.5. Moving Threshold of Edges
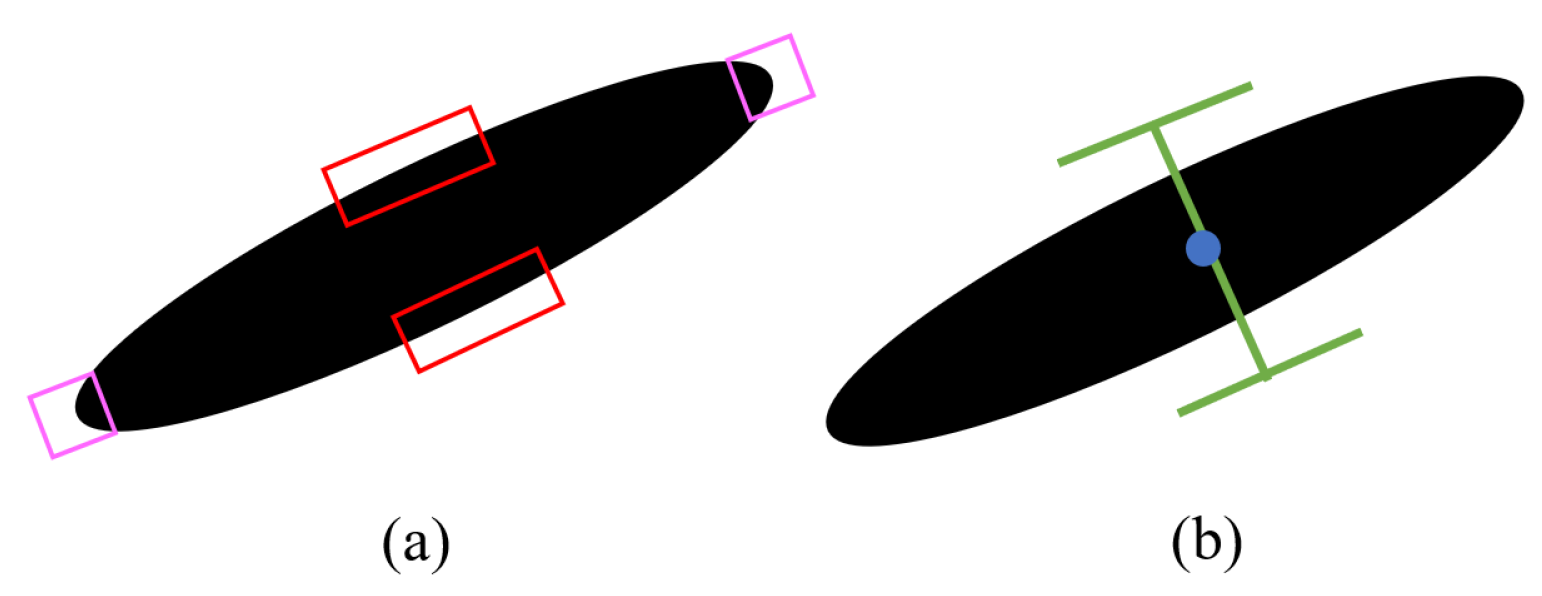
2.6. Objects without Parallel Detected Edges
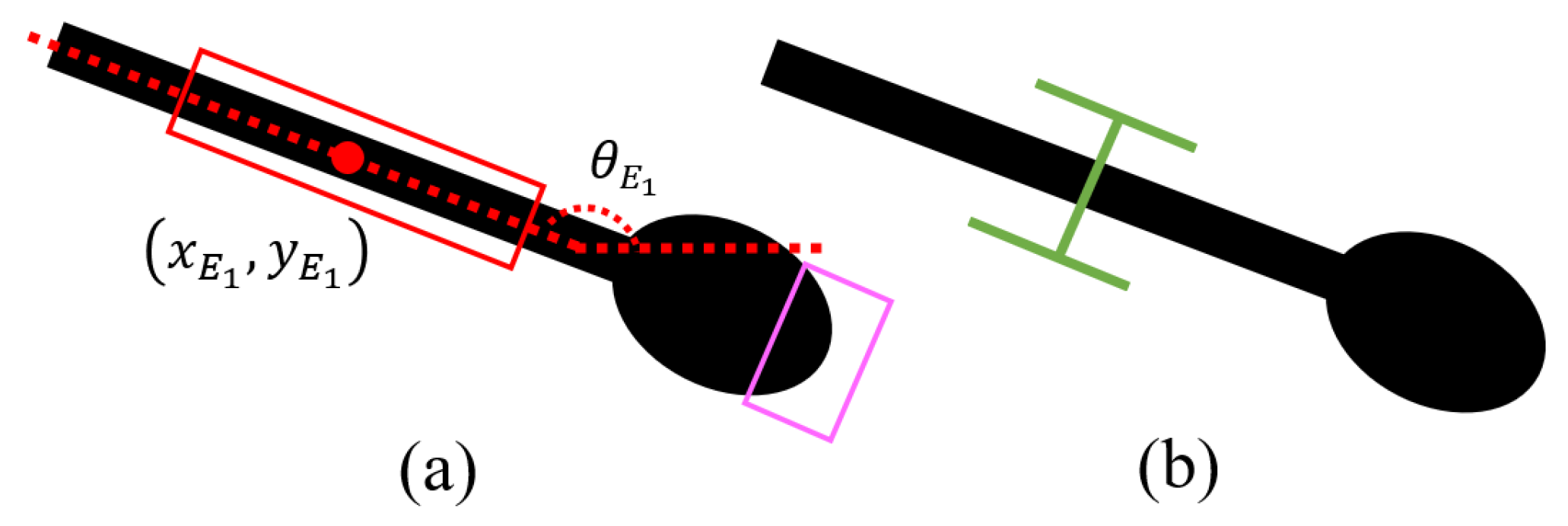
2.7. Objects without Straight Edges
2.8. Grasp Algorithm
| Algorithm 1 Feature and parameter extraction |
|
| Algorithm 2 Search for parallel straight edges |
|
| Algorithm 3 No parallel straight edges |
|
2.9. Derivation of Physical Grasp Pose
3. Experiments
3.1. Experimental Setup
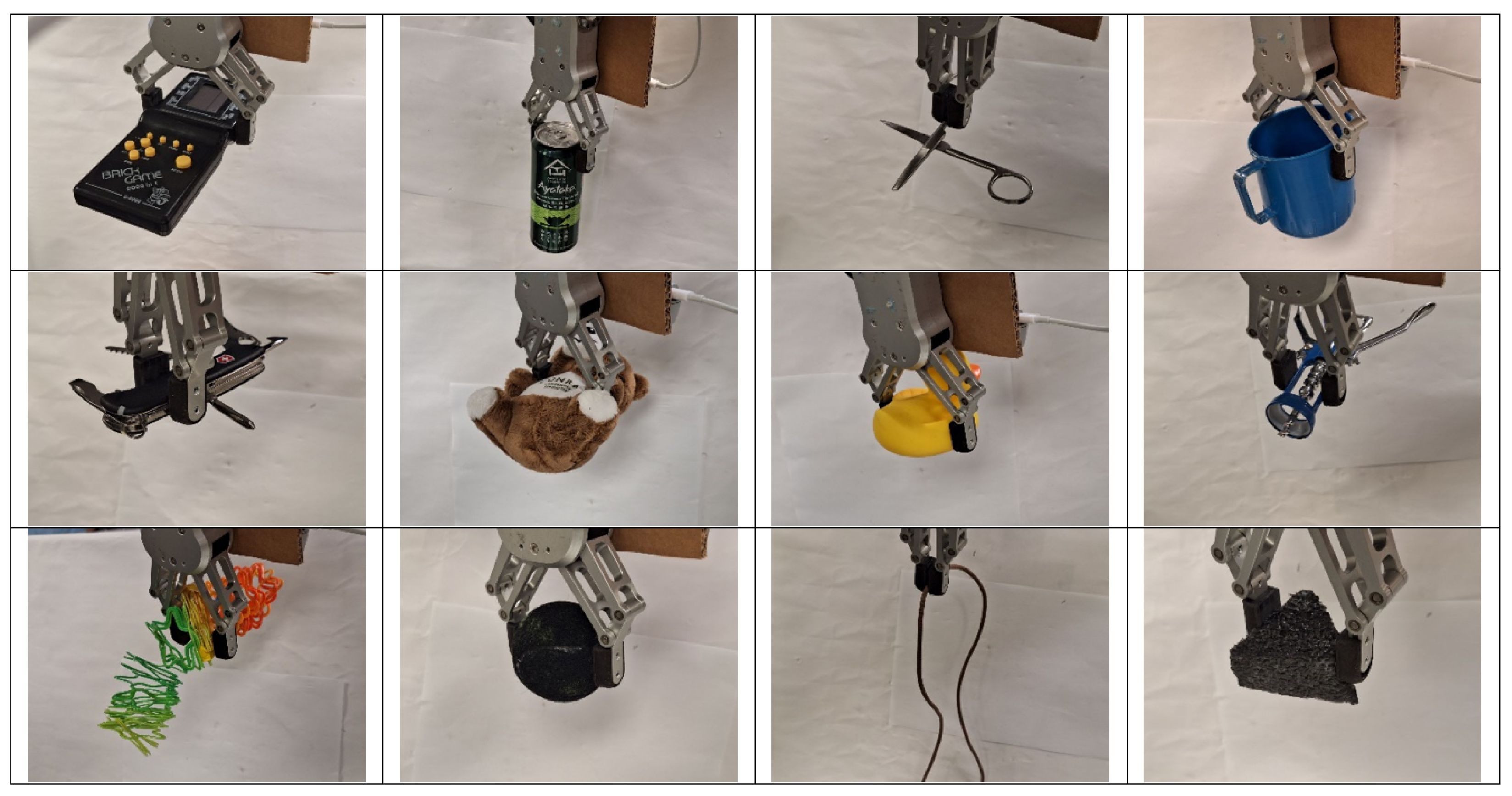
3.2. Object Test Sets
3.3. Results
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bicchi, A. Hands for Dexterous Manipulation and Robust Grasping: A Difficult Road Towards Simplicity. IEEE Trans. Robot. Autom. 2000, 16, 652–662. [Google Scholar] [CrossRef]
- Zhang, H.; Tang, J.; Sun, S.; Lan, X. Robotic grasping from classical to modern: A survey. arXiv 2022, arXiv:2202.03631. [Google Scholar]
- Souza, J.; Rocha, L.; Oliveira, P.; Moreira, A.; Boaventura-Cunha, J. Robotic grasping: From wrench space heuristics to deep learning policies. Robot. Comput.-Integr. Manuf. 2021, 71, 102176. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Tian, H.; Song, K.; Li, S.; Ma, S.; Xu, J.; Yan, Y. Data-driven robotic visual grasping detection for unknown objects: A problem-oriented review. Expert Syst. Appl. 2023, 211, 118624. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G. Imagenet classification with deep convolutional neural networks. In Proceedings of the Advances in Neural Information Processing Systems 25: 26th Annual Conference on Neural Information Processing Systems 2012, Lake Tahoe, NV, USA, 3–6 December 2012. [Google Scholar]
- Bohg, J.; Morales, A.; Asfour, T.; Kragic, D. Data-driven grasp synthesis—A survey. IEEE Trans. Robot. 2013, 30, 289–309. [Google Scholar] [CrossRef]
- Pinto, L.; Gupta, A. Supersizing Self-supervision: Learning to Grasp from 50K Tries and 700 Robot Hours. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3406–3413. [Google Scholar]
- Levine, S.; Pastor, P.; Krizhevsky, A.; Quillen, D. Learning hand-eye coordination for robotic grasping with deep learning and large scale data collection. In Proceedings of the International Symposium on Experimental Robotics (ISER), Nagasaki, Japan, 3–8 October 2016. [Google Scholar]
- Adarsh, P.; Rathi, P. YOLO v3-Tiny: Object Detection and Recognition using one stage improved model. In Proceedings of the International Conference on Advanced Computing & Communication Systems (ICACCS), Coimbatore, India, 6–7 March 2020; Volume 6, pp. 687–694. [Google Scholar]
- Kim, K.; Kim, S. YOLO-based robotic grasping. In Proceedings of the 21st International Conference on Control, Automation, and Systems, Jeju, Republic of Korea, 12–15 October 2021; pp. 1120–1122. [Google Scholar]
- Huang, Y.; Liu, D.; Liu, Z.; Wang, K.; Wang, Q.; Tan, J. A novel robotic grasping method for moving objects based on multi-agent deep reinforcement learning. Robot. Comput.-Integr. Manuf. 2024, 86, 102644. [Google Scholar] [CrossRef]
- Zhang, S.; Guo, Z.; Huang, J.; Ren, W.; Xia, L. Robotic Grasping Position of Irregular Object Based YOLO Algorithm. In Proceedings of the 5th International Conference on Automation, Control, and Robotics Engineering (CACRE), Dalian, China, 19–20 September 2020; pp. 642–646. [Google Scholar]
- Yang, J.; Chen, U.; Chang, K.; Chen, Y. A novel Robotic Grasp Detection Technique by Intergrating YOLO and Grasp Detection Deep Neural Networks. In Proceedings of the International Conference on Advanced Robotics and Intelligent Systems (ARIS), Taipei, Taiwan, 19–21 August 2020; Volume 1. [Google Scholar]
- Geng, Z.; Chen, G. A novel Real-time Grasping Method Cobimbed with YOLO and GDFCN. In Proceedings of the IEEE 10th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 17–19 June 2022; pp. 500–505. [Google Scholar]
- Li, Z.; Xu, B.; Wu, D.; Zhao, K.; Chen, S.; Lu, M.; Cong, J. A YOLO-GGCNN based grasping framework for mobile robots in unknown environments. Expert Syst. Appl. 2023, 225, 119993. [Google Scholar] [CrossRef]
- Saxena, A.; Driemeyer, J.; Kearns, J.; Ng, A. Robotic grasping of novel objects. In Advances in Neural Information Processing Systems; MIT Press: Cambridge, MA, USA, 2006; Volume 19. [Google Scholar]
- Mahler, J.; Liang, J.; Niyaz, S.; Laskey, M.; Doan, R.; Liu, X.; Ojea, J.A.; Goldberg, K. DexNet 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics. arXiv 2017, arXiv:1703.09312. [Google Scholar]
- Morrison, D.; Corke, P.; Leitner, J. Learning robust, real-time, reactive robotic grasping. Int. J. Robot. Res. 2020, 39, 183–201. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, Z.; Wang, L.; Zhu, X.; Huang, H.; Cao, Q. Digital twin enabled grasp outcomes assessment for unknown objects using visual tactile fusion perception. Robot. Comput.-Integr. Manuf. 2023, 84, 102601. [Google Scholar] [CrossRef]
- Eguíluz, A.; Rañó, I. Heuristic grasping of convex objects using 3D imaging and tactile sensing in uncalibrated grasping scenarios. Expert Syst. Appl. 2022, 208, 118114. [Google Scholar] [CrossRef]
- Kelly, M.; YOLOv5 for Oriented Object Detection. Roboflow. Available online: https://blog.roboflow.com/yolov5-for-oriented-object-detection/ (accessed on 11 May 2022).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Training | Attempts | Success |
|---|---|---|---|
| Size | Rate (%) | ||
| GPP [18] | 2500 | 32 | 87.50 |
| DexNet2.0 [19] | 6.7 million | 45 | 80.00 |
| GG-CNN [20] | 51,100 | 120 | 92.00 |
| Method | Training | Test Set | Attempts | Success |
|---|---|---|---|---|
| Size | Rate (%) | |||
| Proposed method | 400 | similar to GPP | 80 | 97.50 |
| similar to DexNet2.0 | 90 | 97.78 | ||
| similar to GG-CNN | 120 | 99.17 | ||
| Self-designed | 180 | 98.33 | ||
| All objects | 400 | 98.25 |
| Object | Success Rate (%) | Object | Success Rate (%) |
|---|---|---|---|
| Mouse | 100 | Kitchen knife | 100 |
| Duct tape | 100 | Marker | 100 |
| Canned drink | 100 | Toy shark | 100 |
| Stapler | 100 | Scissors | 100 |
| Mug | 100 | Rubber duck | 100 |
| Slinky toy | 90 | Keys | 90 |
| Stuffed toy | 100 | Screwdriver | 100 |
| Wire | 90 | Bowl | 100 |
| Sponge | 100 | Jar | 90 |
| Clothes peg | 100 | Circuit board | 100 |
| Toy Gun | 90 | Flashlight | 100 |
| Battery pack | 100 | Banana | 100 |
| Horn | 100 | Whistle | 100 |
| Spatula | 100 | Wine opener | 100 |
| Translucent box | 100 | Toothbrush | 100 |
| Swiss army knife | 100 | Spoon | 90 |
| Remote Control | 100 | Game console | 100 |
| Die | 100 | Triangle | 100 |
| Glasses | 90 | Ball | 100 |
| Electrical component | 100 | Clip | 100 |
| Overall success rate: 98.25% | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khor, K.S.; Liu, C.; Cheah, C.C. Robotic Grasping of Unknown Objects Based on Deep Learning-Based Feature Detection. Sensors 2024, 24, 4861. https://doi.org/10.3390/s24154861
Khor KS, Liu C, Cheah CC. Robotic Grasping of Unknown Objects Based on Deep Learning-Based Feature Detection. Sensors. 2024; 24(15):4861. https://doi.org/10.3390/s24154861
Chicago/Turabian StyleKhor, Kai Sherng, Chao Liu, and Chien Chern Cheah. 2024. "Robotic Grasping of Unknown Objects Based on Deep Learning-Based Feature Detection" Sensors 24, no. 15: 4861. https://doi.org/10.3390/s24154861
APA StyleKhor, K. S., Liu, C., & Cheah, C. C. (2024). Robotic Grasping of Unknown Objects Based on Deep Learning-Based Feature Detection. Sensors, 24(15), 4861. https://doi.org/10.3390/s24154861