
A Density Clustering RAPID Based on an Array-Compensated Damage Index for Quantitative Damage Diagnosis


Abstract
:1. Introduction
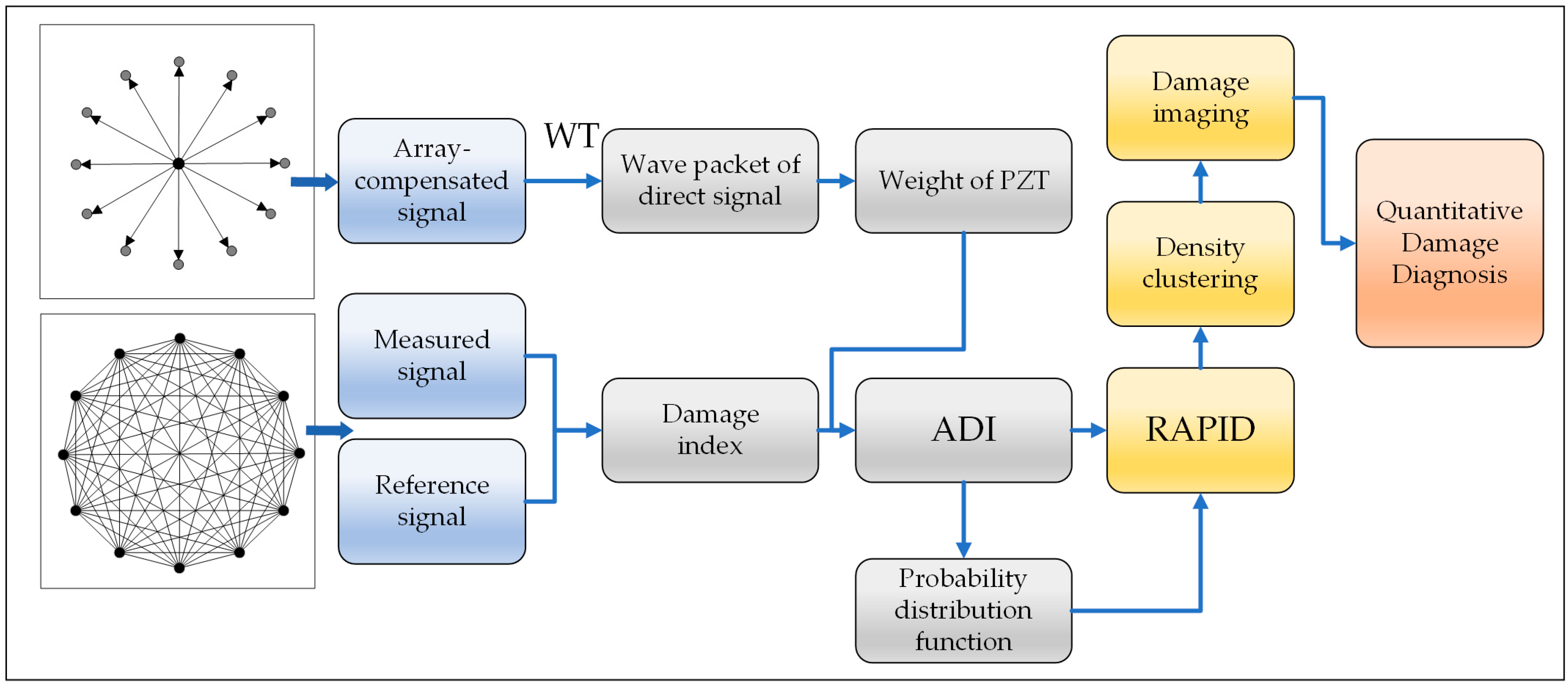
2. The Density Clustering RAPID Algorithm with an Array-Compensated Damage Index
2.1. The Principle of the Original RAPID Algorithm
2.2. The Damage Index Compensated by a Sensor Array
2.3. Optimizing Probability Distribution Function Based on ADI
2.4. Density Clustering for Quantitative Damage Diagnosis
3. Experimental Verification on Aluminum Plate
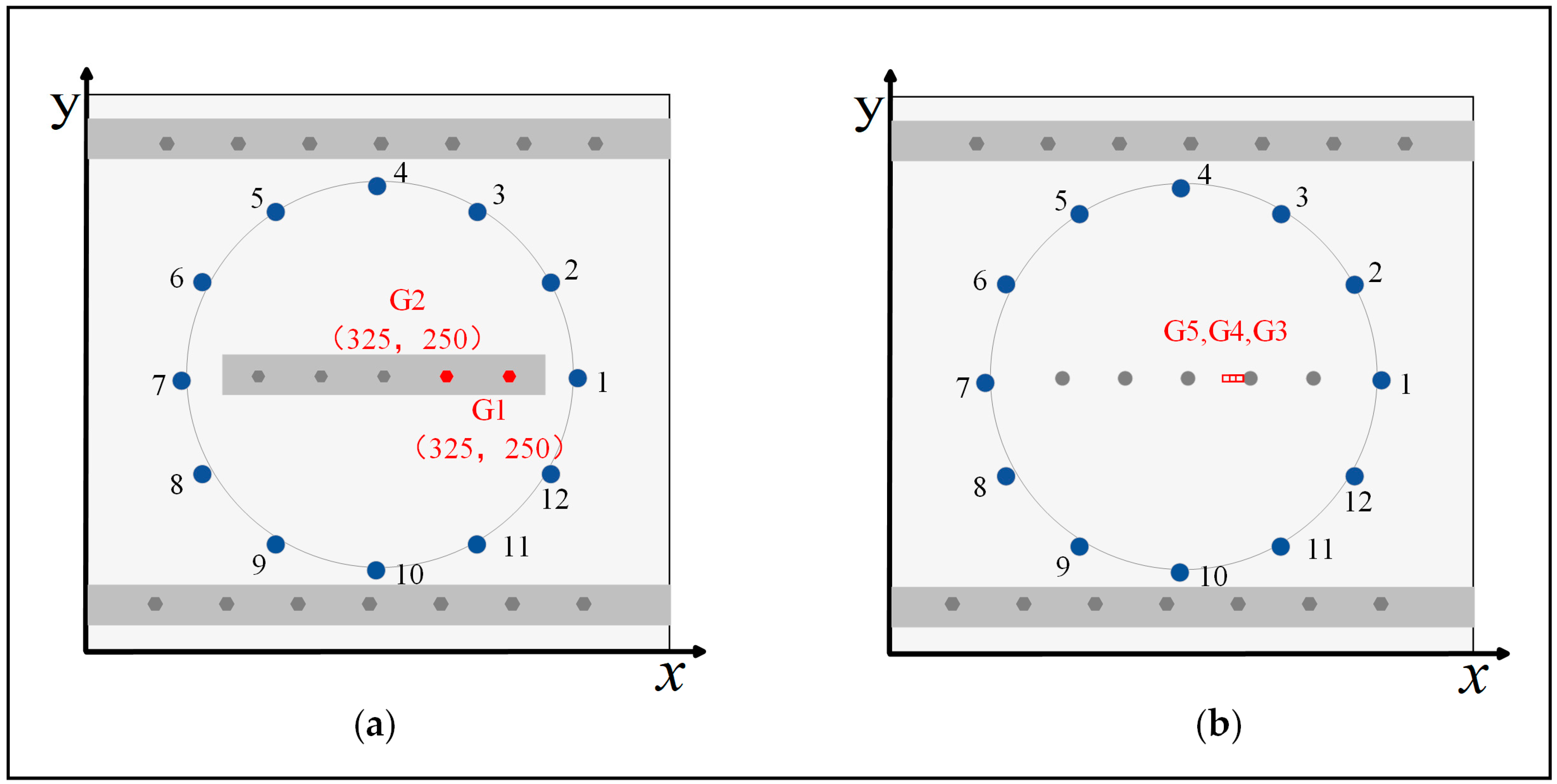
3.1. Experimental Setup
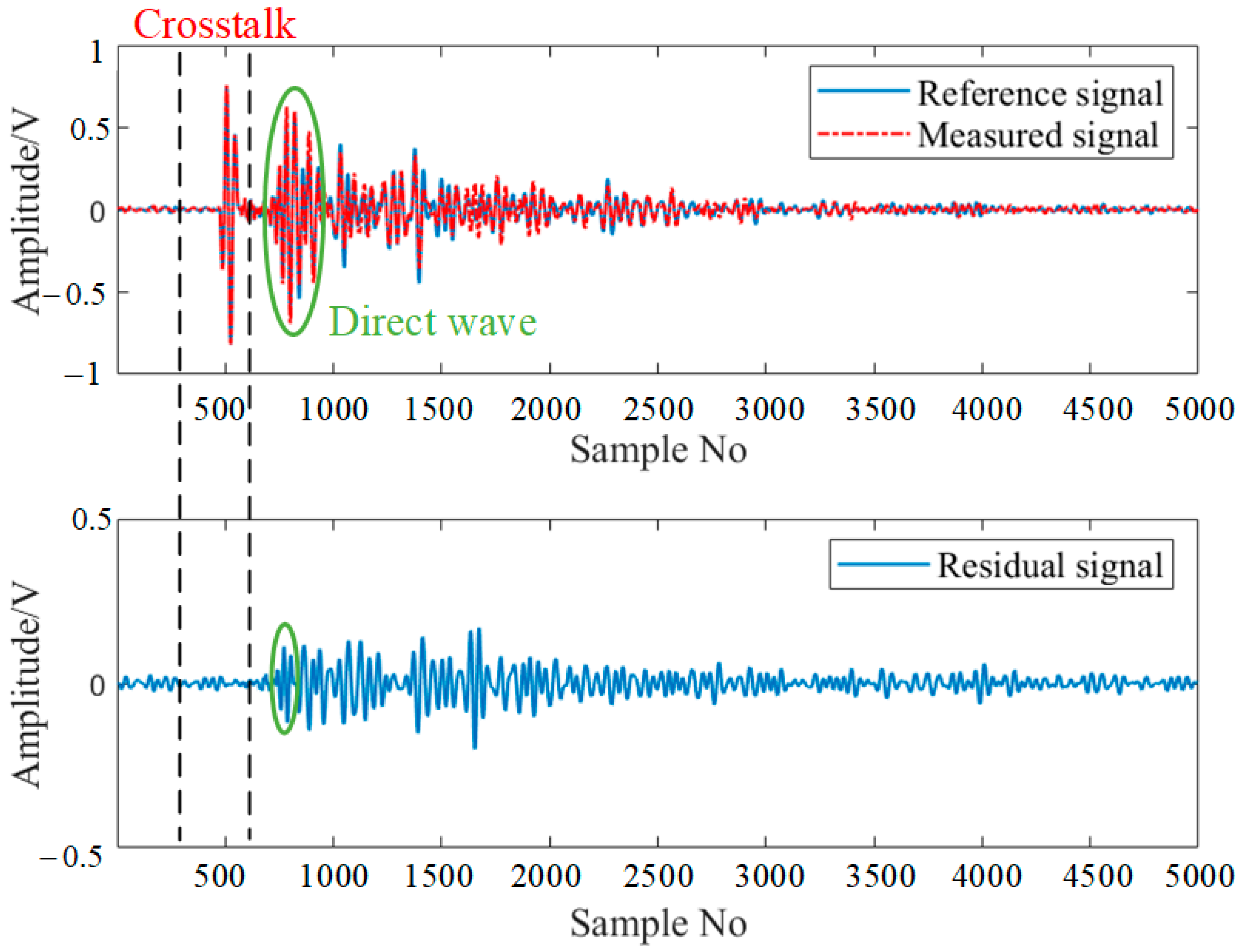
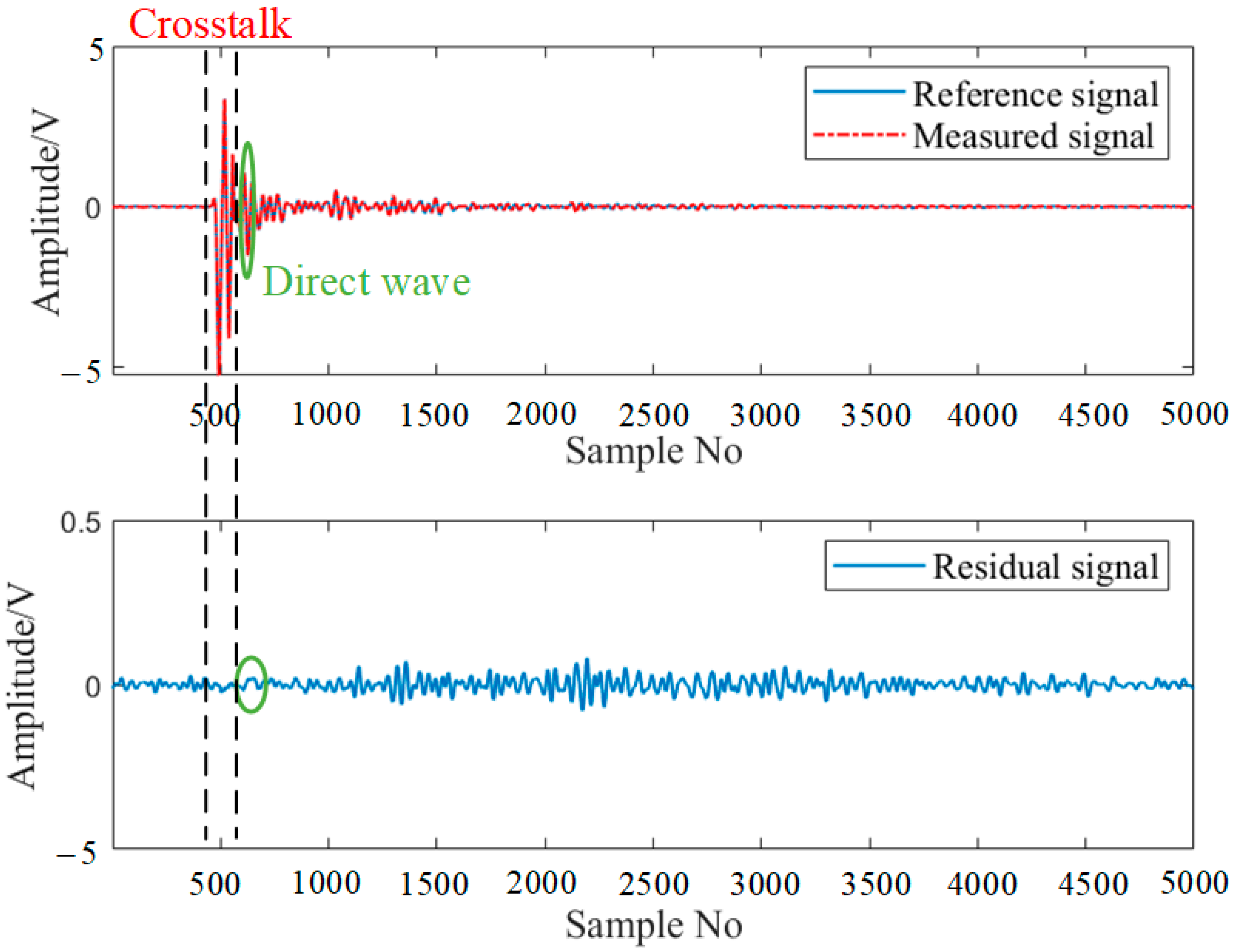
3.2. Typical Damage Scattered Signal
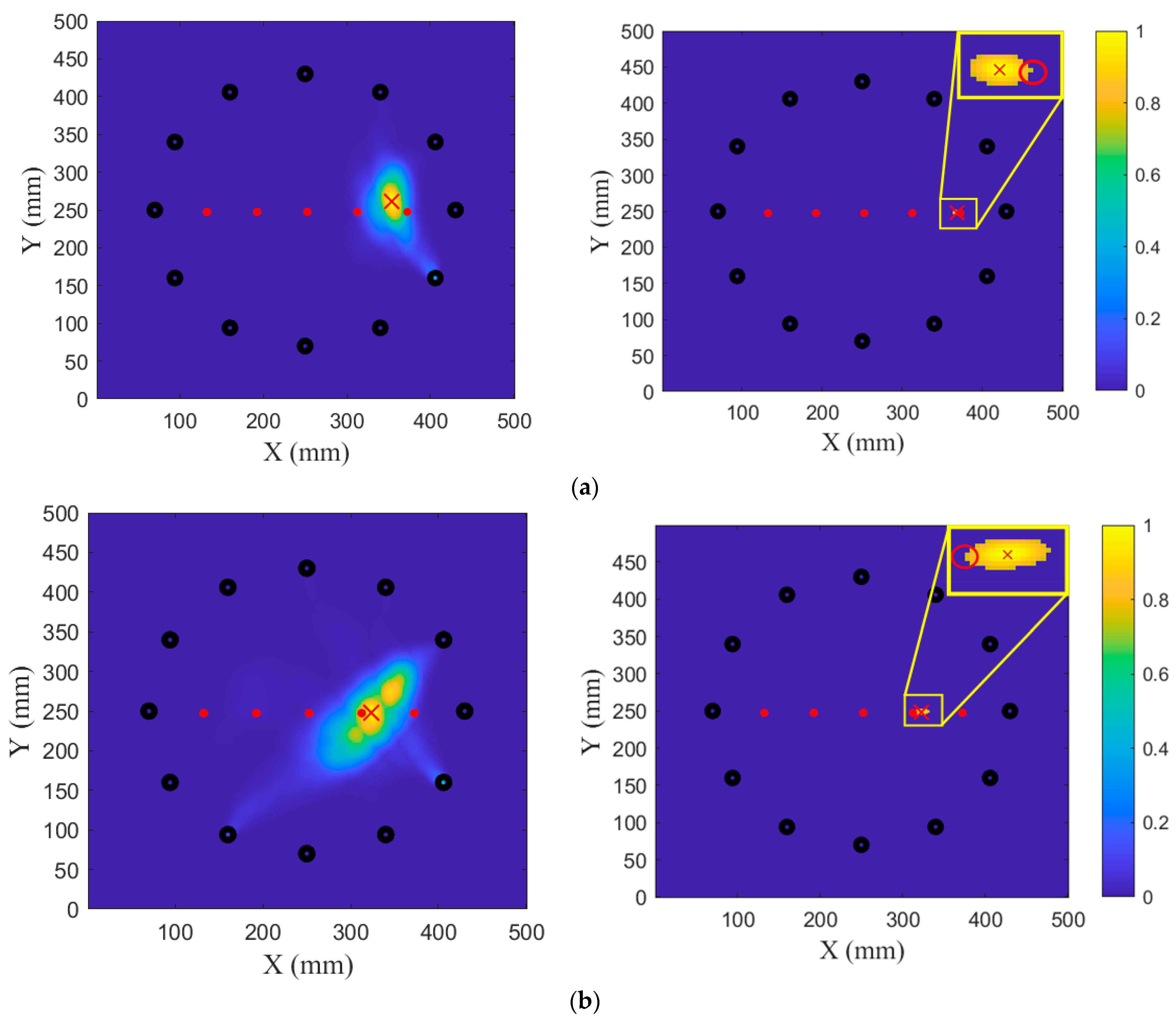
3.3. Damage Imaging Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ricci, F.; Monaco, E.; Boffa, N.D.; Maio, L.; Memmolo, V. Guided waves for structural health monitoring in composites: A review and implementation strategies. Prog. Aerosp. Sci. 2022, 129, 100790. [Google Scholar] [CrossRef]
- Weng, C.; Gu, X.; Jin, H. Coded Excitation for Ultrasonic Testing: A Review. Sensors 2024, 24, 2167. [Google Scholar] [CrossRef]
- Diamanti, K.; Soutis, C. Structural health monitoring techniques for aircraft composite structures. Prog. Aerosp. Sci. 2010, 46, 342–352. [Google Scholar] [CrossRef]
- Yu, Q.; Zhou, S.; Cheng, Y.; Deng, Y. Research on Delamination Damage Quantification Detection of CFRP Bending Plate Based on Lamb Wave Mode Control. Sensors 2024, 24, 1790. [Google Scholar] [CrossRef] [PubMed]
- Zheng, S.; Luo, Y.; Xu, C.; Xu, G. A Review of Laser Ultrasonic Lamb Wave Damage Detection Methods for Thin-Walled Structures. Sensors 2023, 23, 3183. [Google Scholar] [CrossRef]
- Xu, J.; Zhu, W.; Qiu, X.; Xiang, Y. A Novel Baseline-Free Method for Damage Localization Using Guided Waves Based on Hyperbola Imaging Algorithm. Sensors 2023, 23, 2050. [Google Scholar] [CrossRef] [PubMed]
- Karuppasamy, S.S.; Yang, C.-H. Adapting the Time-Domain Synthetic Aperture Focusing Technique (T-SAFT) to Laser Ultrasonics for Imaging the Subsurface Defects. Sensors 2023, 23, 8036. [Google Scholar] [CrossRef]
- Lee, Y.; Cho, Y. An Investigation on a Quantitative Tomographic SHM Technique for a Containment Liner Plate in a Nuclear Power Plant with Guided Wave Mode Selection. Sensors 2019, 19, 2819. [Google Scholar] [CrossRef]
- Hua, J.; Zhang, H.; Miao, Y.; Lin, J. Modified minimum variance imaging of Lamb waves for damage localization in aluminum plates and composite laminates. NDT E Int. 2022, 125, 102574. [Google Scholar] [CrossRef]
- He, J.; Yuan, F.G. Lamb wave-based subwavelength damage imaging using the DORT-MUSIC technique in metallic plates. Struct. Health Monit. 2016, 15, 65–80. [Google Scholar] [CrossRef]
- Qiu, L.; Liu, B.; Yuan, S.; Su, Z. Impact imaging of aircraft composite structure based on a model-independent spatial-wavenumber filter. Ultrasonics 2016, 64, 10–24. [Google Scholar] [CrossRef] [PubMed]
- Wilcox, P.D. Omni-directional guided wave transducer arrays for the rapid inspection of large areas of plate structures. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 699–709. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Ye, L.; Su, Z.; Lu, Y.; Li, F.; Meng, G. Probabilistic damage identification based on correlation analysis using guided wave signals in aluminum plates. Struct. Health Monit. 2010, 9, 133–144. [Google Scholar] [CrossRef]
- Zhao, X.; Gao, H.; Zhang, G.; Ayhan, B.; Yan, F.; Kwan, C.; Rose, J.L. Active health monitoring of an aircraft wing with embedded piezoelectric sensor/actuator network: I. Defect detection, localization and growth monitoring. Smart Mater. Struct. 2007, 16, 1208. [Google Scholar] [CrossRef]
- Hettler, J.; Tabatabaeipour, M.; Delrue, S.; Abeele, K.V.D. Linear and nonlinear guided wave imaging of impact damage in CFRP using a probabilistic approach. Materials 2016, 9, 901. [Google Scholar] [CrossRef]
- Jin, H.; Yan, J.; Liu, X.; Li, W.; Qing, X. Quantitative defect inspection in the curved composite structure using the modified probabilistic tomography algorithm and fusion of damage index. Ultrasonics 2021, 113, 106358. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Ye, L.; Lu, Y. A probabilistic diagnostic algorithm for identification of multiple notches using digital damage fingerprints (DDFs). J. Intell. Mater. Syst. Struct. 2009, 20, 1439–1450. [Google Scholar] [CrossRef]
- Wang, D.; Ye, L.; Lu, Y.; Li, F. A damage diagnostic imaging algorithm based on the quantitative comparison of Lamb wave signals. Smart Mater. Struct. 2010, 19, 065008. [Google Scholar] [CrossRef]
- Huo, H.; He, J.; Guan, X. A Bayesian fusion method for composite damage identification using Lamb wave. Struct. Health Monit. 2021, 20, 2337–2359. [Google Scholar] [CrossRef]
- Li, D.; Yu, H.; Xu, F.; Liu, D.P.; Zhang, J.Q.; Ta, D.A. An lp-norm approach to robust probabilistic inspection of plate-like structure defects with guided waves. Smart Mater. Struct. 2017, 26, 104003. [Google Scholar] [CrossRef]
- Zhou, C.; Su, Z.; Cheng, L. Probability-based diagnostic imaging using hybrid features extracted from ultrasonic Lamb wave signals. Smart Mater. Struct. 2011, 20, 125005. [Google Scholar] [CrossRef]
- Zhao, X.; Royer, R.L.; Owens, S.E.; Rose, J.L. Ultrasonic Lamb wave tomography in structural health monitoring. Smart Mater. Struct. 2011, 20, 105002. [Google Scholar] [CrossRef]
- Lee, J.; Sheen, B.; Cho, Y. Multi-defect tomographic imaging with a variable shape factor for the RAPID algorithm. J. Vis. 2016, 19, 393–402. [Google Scholar] [CrossRef]
- Lee, J.; Sheen, B.; Cho, Y. Quantitative tomographic visualization for irregular shape defects by guided wave long range inspection. Int. J. Precis. Eng. Manuf. 2015, 16, 1949–1954. [Google Scholar] [CrossRef]
- Sheen, B.; Cho, Y. A study on quantitative lamb wave tomogram via modified RAPID algorithm with shape factor optimization. Int. J. Precis. Eng. Manuf. 2012, 13, 671–677. [Google Scholar] [CrossRef]
- Li, W.; Cho, Y. Combination of nonlinear ultrasonics and guided wave tomography for imaging the micro-defects. Ultrasonics 2016, 65, 87–95. [Google Scholar] [CrossRef]
- Koduru, J.P.; Rose, J.L. Mode controlled guided wave tomography using annular array transducers for SHM of water loaded plate like structures. Smart Mater. Struct. 2013, 22, 125021. [Google Scholar] [CrossRef]
- Wu, Z.; Liu, K.; Wang, Y.; Zheng, Y. Validation and evaluation of damage identification using probability-based diagnostic imaging on a stiffened composite panel. J. Intell. Mater. Syst. Struct. 2015, 26, 2181–2195. [Google Scholar] [CrossRef]
- Dziendzikowski, M.; Dragan, K.; Katunin, A. Localizing impact damage of composite structures with modified RAPID algorithm and non-circular PZT arrays. Arch. Civ. Mech. Eng. 2017, 17, 178–187. [Google Scholar] [CrossRef]
- Wang, S.; Wu, W.; Shen, Y.; Liu, Y.; Jiang, S. Influence of the PZT sensor array configuration on Lamb wave tomography imaging with the RAPID algorithm for hole and crack detection. Sensors 2020, 20, 860. [Google Scholar] [CrossRef]
- Balasubramaniam, K.; Sikdar, S.; Ziaja, D.; Jurek, M.; Soman, R.; Malinowski, P. A global-local damage localization and quantification approach in composite structures using ultrasonic guided waves and active infrared thermography. Smart Mater. Struct. 2023, 32, 035016. [Google Scholar] [CrossRef]
- Zeng, L.; Lin, J.; Hua, J.; Shi, W. Interference resisting design for guided wave tomography. Smart Mater. Struct. 2013, 22, 055017. [Google Scholar] [CrossRef]
- Gonzalez-Jimenez, A.; Lomazzi, L.; Cadini, F.; Beligni, A.; Sbarufatti, C.; Giglio, M.; Manes, A. On the mitigation of the RAPID algorithm uneven sensing network issue employing averaging and Gaussian blur filtering techniques. Compos. Struct. 2021, 278, 114716. [Google Scholar] [CrossRef]
- Yan, F.; Royer, R.L., Jr.; Rose, J.L. Ultrasonic guided wave imaging techniques in structural health monitoring. J. Intell. Mater. Syst. Struct. 2010, 21, 377–384. [Google Scholar] [CrossRef]
- Ziaja, D.; Jurek, M. An Influence of Actuator Gluing on Elastic Wave Excited in the Structure. Materials 2024, 17, 2160. [Google Scholar] [CrossRef]
- Moix-Bonet, M.; Wierach, P.; Loendersloot, R.; Bach, M. Damage assessment in composite structures based on acousto-ultrasonics—Evaluation of performance. In Smart Intelligent Aircraft Structures (SARISTU) Proceedings of the Final Project Conference; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Jin, H.; Yan, J.; Li, W.; Qing, X. Monitoring of fatigue crack propagation by damage index of ultrasonic guided waves calculated by various acoustic features. Appl. Sci. 2019, 9, 4254. [Google Scholar] [CrossRef]
- Wang, Q.; Yuan, S.; Hong, M.; Su, Z. On time reversal-based signal enhancement for active lamb wave-based damage identification. Smart Struct. Syst. 2015, 15, 1463–1479. [Google Scholar] [CrossRef]
- Bao, Q.; Xie, T.; Hu, W.; Tao, K.; Wang, Q. Multi-type damage localization using the scattering coefficient-based RAPID algorithm with damage indexes separation and imaging fusion. Struct. Health Monit. 2024, 23, 1592–1605. [Google Scholar] [CrossRef]
- Gorgin, R.; Luo, Y.; Wu, Z. Environmental and operational conditions effects on Lamb wave based structural health monitoring systems: A review. Ultrasonics 2020, 105, 106114. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method Name | Mathematical Formula |
|---|---|
| FreAmpDiff | |
| Cross Corr | |
| RMSD | |
| FreDiff | |
| PhaseDiff | |
| CCD | |
| DiffCurveEnergy | |
| ScatAmp | |
| ChDiffSTD |
| Damage Type | Original RAPID | Proposed Method | ||
|---|---|---|---|---|
| Localization | Error | Localization | Error | |
| G1(370, 250) | (354, 262) | 20 | (366, 252) | 4 |
| G2(310, 250) | (323, 248) | 13 | (318, 249) | 8 |
| G3(309, 250) | / | / | (311, 250) | 2 |
| G4(307, 250) | / | / | (302, 248) | 5 |
| G5(305, 250) | / | / | (310, 249) | 5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, Q.; Xie, T.; Zhuang, Y.; Wang, Q. A Density Clustering RAPID Based on an Array-Compensated Damage Index for Quantitative Damage Diagnosis. Sensors 2024, 24, 4904. https://doi.org/10.3390/s24154904
Bao Q, Xie T, Zhuang Y, Wang Q. A Density Clustering RAPID Based on an Array-Compensated Damage Index for Quantitative Damage Diagnosis. Sensors. 2024; 24(15):4904. https://doi.org/10.3390/s24154904
Chicago/Turabian StyleBao, Qiao, Tian Xie, Yan Zhuang, and Qiang Wang. 2024. "A Density Clustering RAPID Based on an Array-Compensated Damage Index for Quantitative Damage Diagnosis" Sensors 24, no. 15: 4904. https://doi.org/10.3390/s24154904