






Design and Implementation of a Generalized Safety Fault Diagnosis System for China Space Station Scientific Experimental Rack

Abstract
1. Introduction
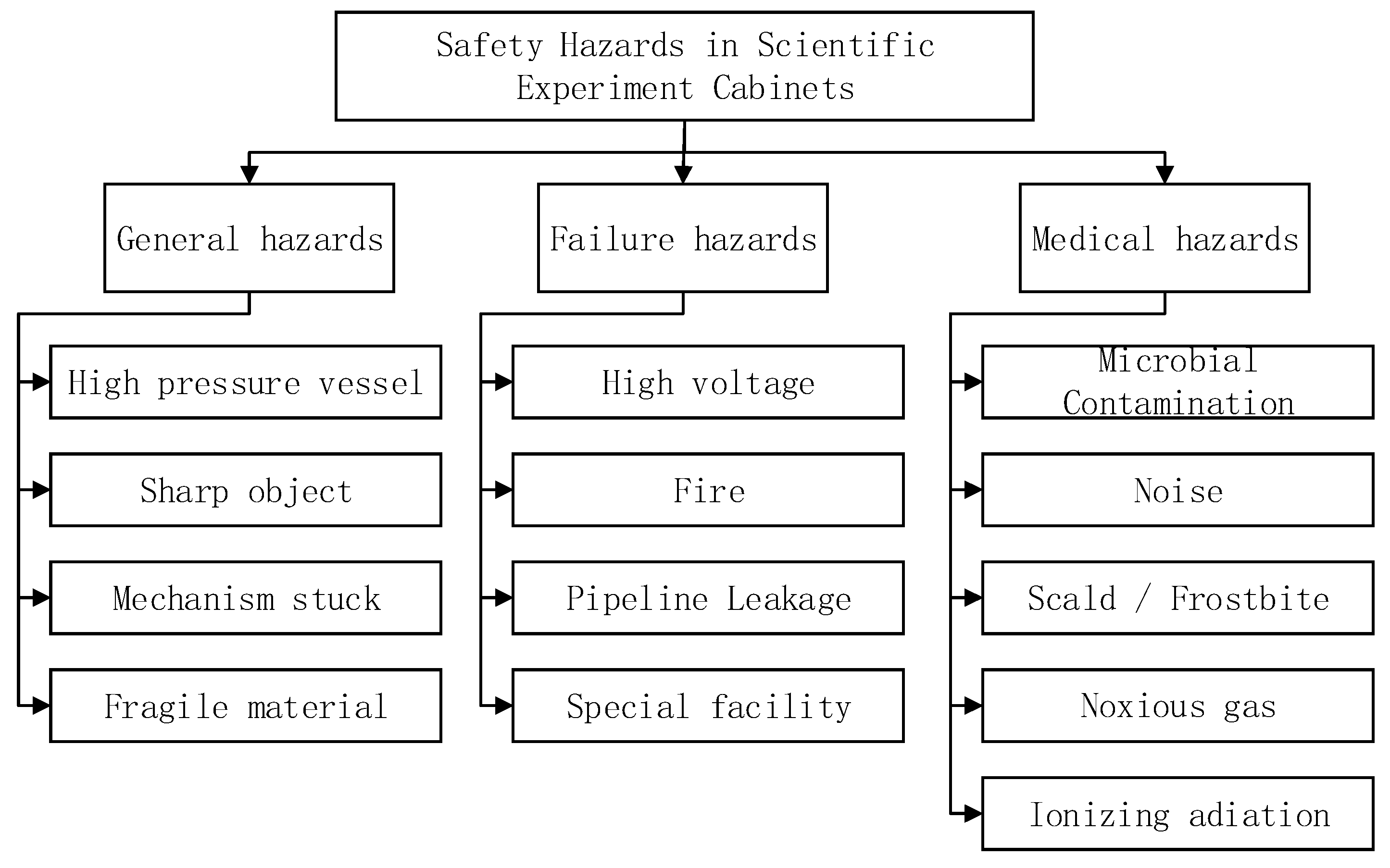
2. Safety-Related Hazard Analysis of the Scientific Experimental Rack
3. System Design Requirements Analysis
3.1. Functional Requirements for Safety Diagnosis
- The system must include a collection and monitoring function for the payload temperature of the SER, and have fault detection, alarm, and processing capabilities;
- The system must include a collection and monitoring function for the working voltage and (or) current of the payload of the SER, and have fault detection, alarm, and processing capabilities;
- The system must include a collecting and monitoring function for the internal pressure of the pressure vessel in the payload of the SER, and have fault detection, alarm, and processing capabilities;
- The system must include a collecting and monitoring function for the thermal control fan speed of the SER, and have fault detection, alarm, and processing capabilities;
- The system must include a unified number management, in-orbit measurement and control, and data transmission function for the payload of the SER, and have fault detection, alarm, and processing capabilities.
3.2. Performance Requirements for Safe Diagnosis
- The flow measurement range of the thermal liquid is 0~170 L/h, and the measurement accuracy is better than ±5%;
- The work pressure measurement range of the thermal liquid is 20~500 kPa, the static measurement accuracy is better than ±0.8% FS;
- The temperature measurement range of the thermal liquid is −10~60 °C, the accuracy is better than ±0.3 °C in the range of 0~40 °C, and better than ±1 °C in other ranges;
- The range of voltage acquisition in the analog telemetry data is 0~5 V, and the accuracy is better than ±50 mV;
- The pulse width of the internal OC programmed output of the system is 80 ± 10 ms;
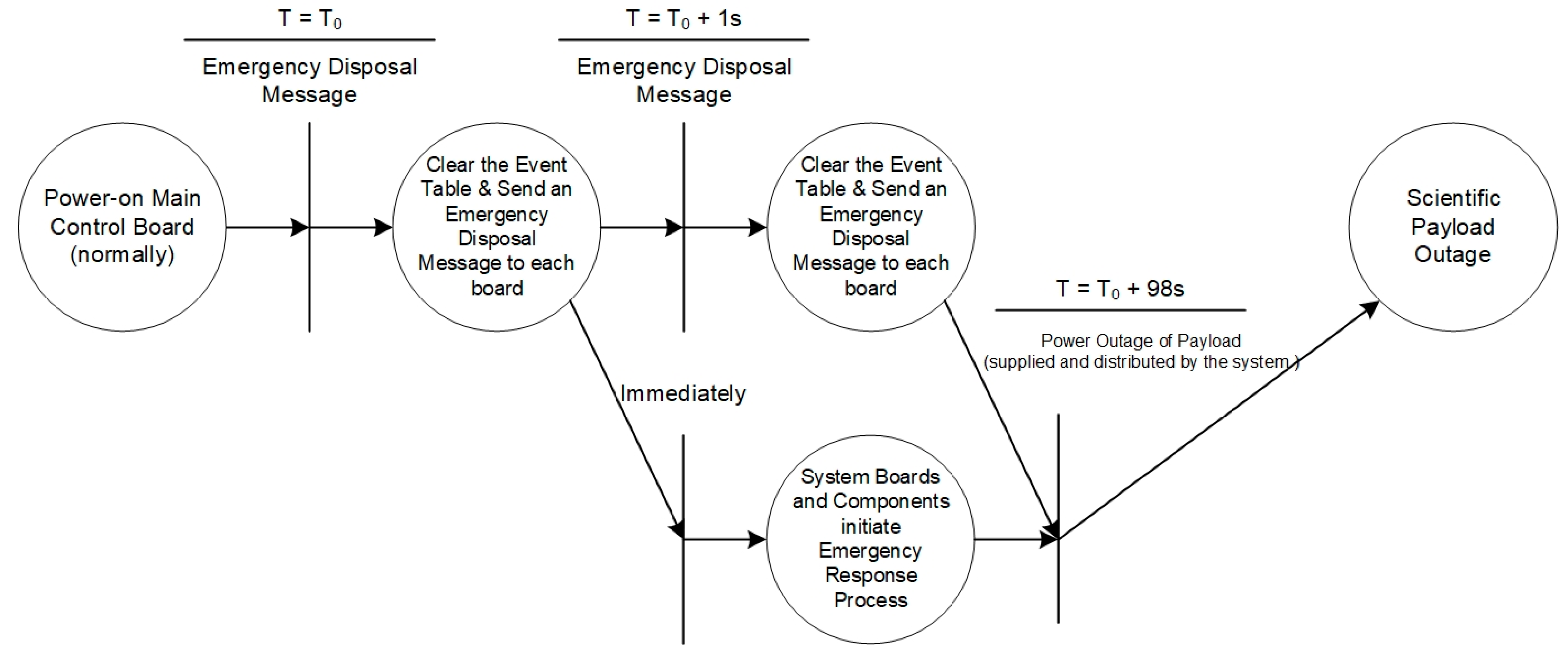
- The time error of emergency power-off disposal is ≤1 s.
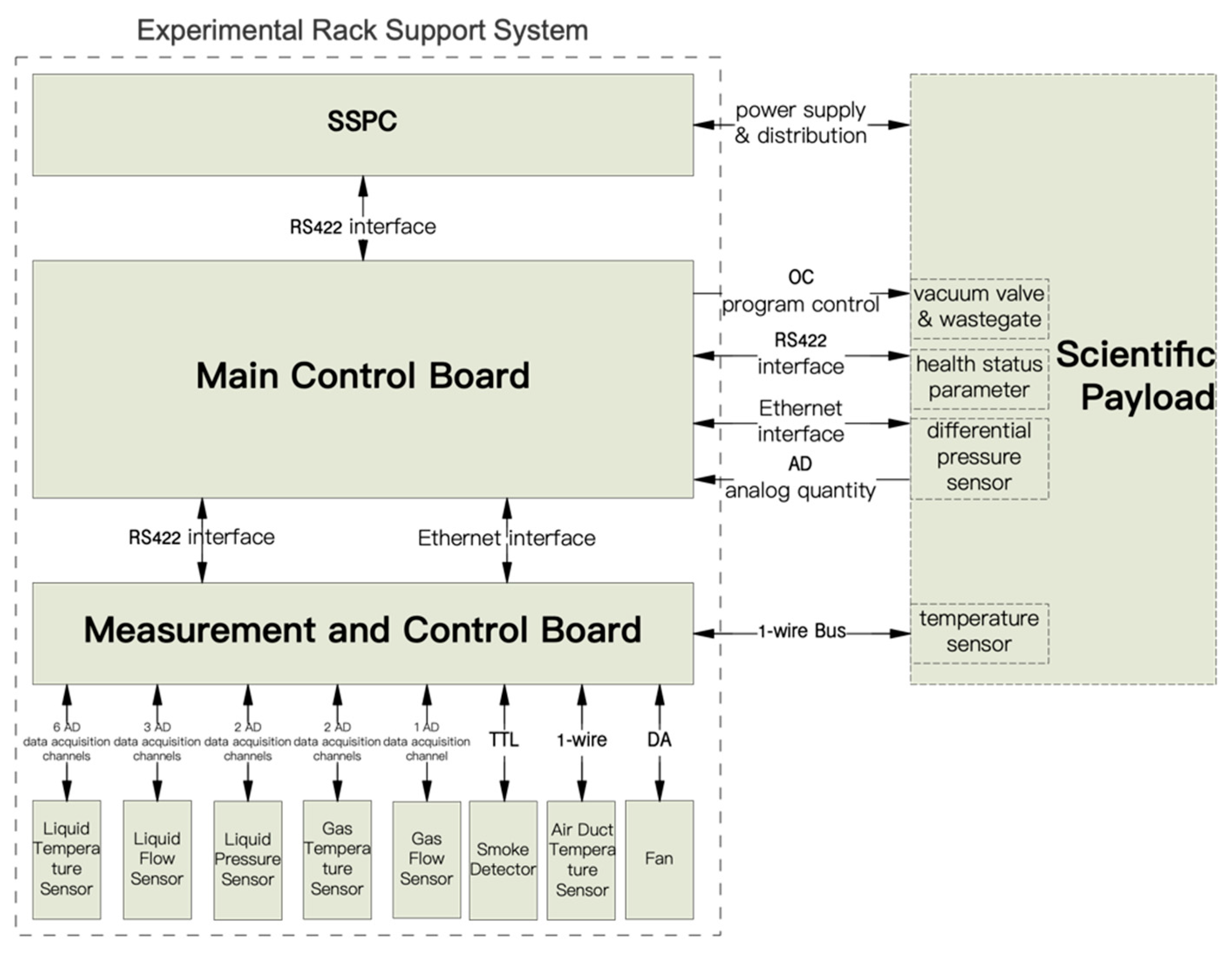
4. System Hardware Design Framework
5. System Software Function Realization
5.1. Software Interface Analysis
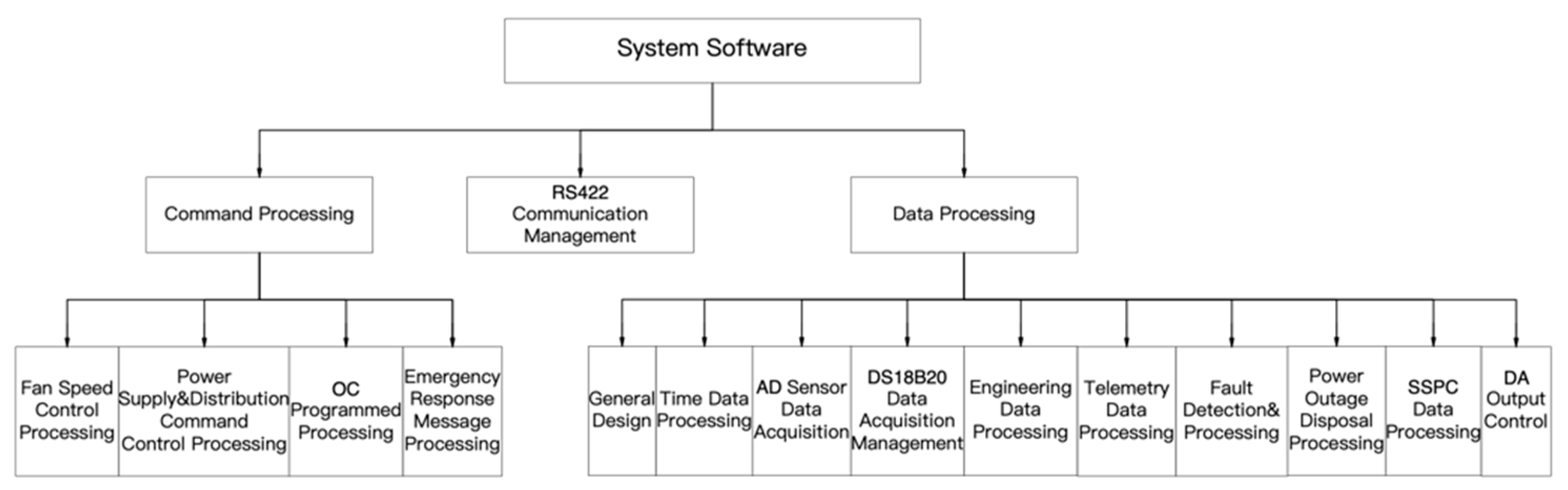
5.2. Software Configuration Architecture
5.2.1. Communication Management Module
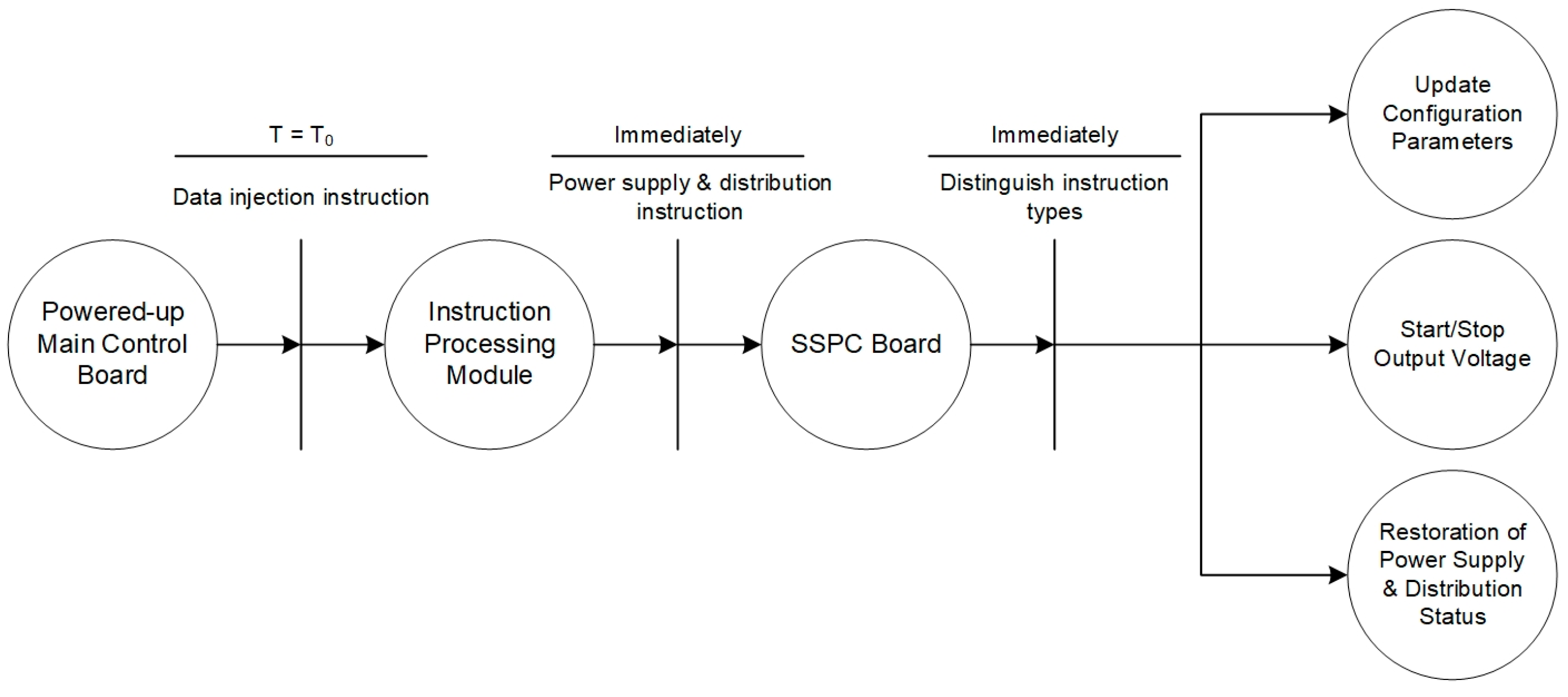
5.2.2. Instruction Processing Module
5.2.3. Data Processing Module
6. On-Orbit Fault Diagnosis Algorithm Implementation
6.1. Leakage of Thermal Liquid: Simultaneous Pressure-Temperature Anomalies
6.2. Excessive Temperature Payloads: High Temperature of the Liquid at Inlet, High Temperature or Fire of the Payload or Air Duct Inside Rack
- (1)
- High temperature of the liquid at inlet
- (2)
- High temperature or fire of the payload or air duct inside rack
- (a)
- The temperature of any one of the eight groups (16) of DS18B20 sensors on the air duct (GF1~GF8) collected by the RTD is ≥a °C and the duration of this state (t) reaches b s; the payload power supply current (i) collected by the RCS is ≥c or the payload power supply state of RCS (Z) is “d” (a, b, c, d are constants).
- (b)
- The air inlet temperature (T5) of the RTD is ≥a °C and the smoke sensor (Y) of the RTD detects the presence of smoke (‘c’); the duration (t) of the state is up to b s (a, b, c are constants).
6.3. Short-Circuit, Over-Current, etc.
6.4. Pressure Anomalies in Pressure Vessel
- (1)
- When the differential pressure sensor used is a positive differential pressure sensor and negative pressure occurs in the pressure vessel, the differential pressure sensors (P1 and P2) directly taken by RCS are ≥a Pa. The number of consecutive groups (N) of this state reaches b, and the power supply and distribution status of payload (L) is “c” or “d” (a, b, c, d are constants).
- (2)
- When the differential pressure sensor used is a positive and negative differential pressure sensor (one sensor can collect negative and positive pressure at the same time), and negative pressure occurs in the pressure vessel, the differential pressure sensors directly collected by the RCS (P1 & P2) ≤ a Pa and the number of consecutive groups of this state (N) reaches b. The power supply and distribution status of payload (L) is “c “ or “d” (a, b, c, d are constants).
- (3)
- When overpressure occurs in the pressure vessel, the differential pressure sensors (P1 and P2) of the RCS direct mining are ≥a Pa. The number of consecutive groups (N) of this state reaches b, and the power supply and distribution status of payload (L) is “c” or “d” (a, b c, d are constants).
6.5. Abnormal Operation of Fan
6.6. Failure of Critical Devices Related to the Safety of the Scientific Payload Itself
- (1)
- When the failure level (L) = a||b||c of the payload health status parameter captured by the RCS and the number of consecutive groups (N) of this status reach d (a, b, c, d are constants), failure is considered to have occurred.
- (2)
- When the failure level (L) = e of the payload health status parameter collected by the RCS and the number of consecutive groups (N) of this status reach d (e and d are constants), then failure is considered to have occurred.
- (3)
- When the failure level (L) = f of the payload health status parameter captured by the RCS and the number of consecutive groups (N) of this status reach d (f and d are constants), then failure is considered to have occurred.
7. System Application and Analysis
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhou, J. Chinese Space Station Project Overall Vision. Manned Spacefl. 2013, 19, 1–10. [Google Scholar]
- Haifeng, Y.; Xuedi, X.; Xuyang, Y. System-level safety assurance technology and application for space station mission manned spacecraft. Spacecr. Eng. 2023, 32, 35–42. [Google Scholar]
- Wei, W.; Gong, W. Research on safety determination technology of space application payloads for space station engineering. Manned Spacefl. 2015, 21, 146–152. [Google Scholar]
- Microsemi Headquarters. IGL002 FPGA and SmartFusion2 SoC FPGA; DS0128 Datasheet [Revision 12]. Available online: https://www.microsemi.com/document-portal/doc_download/132042-igloo2-fpga-datasheet (accessed on 15 June 2024).
- Arm Ltd. Arm Cortex-M3 Processor Datasheet. Arm Developer. Available online: https://developer.arm.com/documentation/102831/latest (accessed on 15 June 2024).
- Zhao, Y.; Ou, L.; Li, H.; Zhang, X.; Yang, Y. Design and realization of an intelligent power distribution system based on FPGA and SSPC. Comput. Meas. Control 2016, 24, 220–222. [Google Scholar] [CrossRef]
- Xutao, Y.; Zhen, Z. Design of small intelligent distributor based on multi-channel SSPC. Electromech. Eng. Technol. 2021, 50, 148–151. [Google Scholar]
- Gang, L.; Yanfeng, Z. 1-Wire bus digital temperature sensor DS18B20 principle and application. Mod. Electron. Technol. 2005, 21, 77–79. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Interface Name | Interface Identification | Function Introduction |
|---|---|---|
| RS422 interface between main control board and the SSPC board | I/F W01 | (1) The main control board receives the engineering data fed back from the SSPC board through this interface, which includes the payload voltage and current values collected by the SSPC board, as well as the abnormal status of the payload in case of overcurrent, short-circuit, and other abnormal phenomena; (2) The SSPC board receives instructions sent by the main control board through this interface and can supply and distribute 100 V and 28 V to the payload. |
| RS422 interface between main control board and measurement and control boards | I/F W02 | (1) The main control board sends data injection instructions, etc. to the measurement and control board through this interface, and can control the speed of the fan in the thermal control system; (2) The measurement and control board sends digital telemetry data and engineering data to the main control board through this interface, which includes liquid temperature, flow rate, pressure, gas temperature, gas flow rate, smoke detector status, fan speed, and other information collected by the measurement and control board. |
| RS422 interface between the main control board and the scientific payloads | I/F W03 | (1) The main control board sends data injection instructions, timecode and other messages to the scientific payload through this interface; (2) The scientific payload sends digital telemetry data and engineering data to the main control board through this interface, which contains the health status parameter. |
| OC programmable interface of the main control board to the scientific payloads | I/F W04 | The main control board sends OC pulses to the scientific payload through this interface; the scientific payload can use this interface to control its internal related modules, for example, it can control the switch of the self-locking valves of the vacuum and exhaust lines through OC program control. |
| AD interface of the main control board to the scientific payloads | I/F W05 | The main control board collects the corresponding analog data of the scientific payload through this interface, and then downlinks it through the digital telemetry data; the scientific payload can monitor its own status through the digital telemetry data of the main control board, for example, it can monitor the pressure situation of the internal environment of the scientific payload through this AD interface. |
| 1-wire bus interface between the board and the scientific payloads | I/F W06 | The measurement and control board can collect the temperature of the DS18B20 temperature sensor of the scientific payload through this interface. |
| AD interface between the board and each sensor | I/F W07 | The measurement and control board can collect liquid temperature, liquid flow, liquid pressure, gas temperature, gas flow and other analog telemetry data through this interface. |
| Digital Pulse Signal Interface between Control Board and Smoke Detector | I/F W08 | The interface allows the board to collect the smoke detected by the smoke detector. |
| DA chip control interface between the measurement and control board and the wind turbine | I/F W09 | The measurement and control board can control the fan speed through the DA output (0~5 VDC) of this interface and collect the fan speed signal FPS through this interface. |
| 1-wire bus interface between the measurement and control board and the air duct DS18B20 | I/F W10 | The measurement and control board can collect the temperature of the DS18B20 temperature sensor of the air duct through this interface. |
| Supply and distribution interface of the SSPC board to scientific payloads | I/F W11 | The SSPC board provides 100 V and 28 V power supply to the scientific payload, and also collects the current operating voltage and current of the scientific payload. |
| Ethernet interface between the main control board and measurement and control boards | I/F W12 | (1) Serves as a backup interface for I/F W02; (2) The main control board sends data injection instructions, etc. to the measurement and control board through this interface, and can control the speed of the fan in the thermal control system; (3) The measurement and control board sends digital telemetry data and engineering data to the main control board through this interface, which includes liquid temperature, flow rate, pressure, gas temperature, gas flow rate, smoke detector status, fan speed, and other information collected by the measurement and control board. |
| Ethernet interface between the main control board and the scientific payloads | I/F W13 | (1) Serves as a backup interface for I/F W03; (2) The main control board sends data injection instructions, timecode and other messages to the scientific payload through this interface; (3) The scientific payload sends digital telemetry data and engineering data to the main control board through this interface, which contains the health status parameter. |
| Time Code | 100 V Maximum Current of Main Channel 1 (A) | 100 V Main Channel 1 Status | SSPC Channel Name | SSPC Reference Current (A) | SSPC Short Circuit Current (A) |
|---|---|---|---|---|---|
| 44:12.7 | 2.46 | 2 | 5 | 11.99 | 23.99 |
| 44:13.2 | 2.46 | 2 | 6 | 11.99 | 23.99 |
| 44:13.7 | 2.46 | 2 | 7 | 11.99 | 23.99 |
| 44:14.2 | 2.46 | 2 | 8 | 11.99 | 23.99 |
| 44:14.7 | 2.46 | 2 | 9 | 3 | 8.99 |
| 44:15.2 | 11.17 | 4 | 10 | 3 | 8.99 |
| 44:15.7 | 11.17 | 4 | 11 | 4 | 7.99 |
| 44:16.3 | 11.17 | 4 | 12 | 4 | 7.99 |
| 44:16.8 | 11.17 | 4 | 13 | 6 | 11.99 |
| 44:17.3 | 11.17 | 4 | 14 | 6 | 11.99 |
| 44:17.8 | 11.17 | 4 | 15 | 6 | 11.99 |
| 44:18.3 | 11.17 | 4 | 16 | 5 | 14.99 |
| 44:18.8 | 11.17 | 4 | 17 | 6 | 11.99 |
| 44:19.3 | 11.17 | 4 | 18 | 4 | 11.99 |
| 44:19.8 | 11.17 | 4 | 19 | 6 | 11.99 |
| 44:20.3 | 11.17 | 4 | 20 | 6 | 11.99 |
| 44:20.8 | 11.17 | 4 | 21 | 6 | 11.99 |
| 44:21.3 | 11.17 | 4 | 22 | 6 | 11.99 |
| 44:21.8 | 11.17 | 4 | 23 | 2 | 7.99 |
| 44:22.3 | 11.17 | 4 | 24 | 2 | 7.99 |
| 44:22.8 | 11.17 | 4 | 1 | 5 | 10 |
| 44:23.4 | 11.17 | 4 | 2 | 5 | 10 |
| 44:23.9 | 11.17 | 4 | 3 | 11.99 | 23.99 |
| 44:24.4 | 11.17 | 4 | 4 | 11.99 | 23.99 |
| Payload Time | Payload Health Status Word | Rack Time | Alarm Parameter | Rack Health Status Word |
|---|---|---|---|---|
| 18:45:36.261 | 00H | 18:45:38.585 | 0000H | 00H |
| 18:45:36.761 | 00H | 18:45:39.094 | 0000H | 00H |
| 18:45:37.261 | 00H | 18:45:39.585 | 0000H | 00H |
| 18:45:37.761 | 00H | 18:45:40.106 | 0000H | 00H |
| 18:45:38.161 | AAH | 18:45:40.606 | 0000H | 00H |
| 18:45:38.661 | AAH | 18:45:41.126 | 0000H | 00H |
| 18:45:39.161 | AAH | 18:45:41.628 | 0000H | A1H |
| 18:45:39.661 | AAH | 18:45:42.123 | 0000H | A1H |
| 18:45:40.161 | AAH | 18:45:42.643 | E30AH | A1H |
| 18:45:40.661 | AAH | 18:45:43.144 | E30AH | A1H |
| 18:45:41.161 | AAH | 18:45:43.655 | E30AH | A1H |
| 18:45:41.661 | AAH | 18:45:44.155 | E30AH | A1H |
| 18:45:42.161 | AAH | 18:45:44.663 | E30AH | A1H |
| 18:45:42.561 | AAH | 18:45:45.163 | E30AH | A1H |
| 18:45:43.061 | AAH | 18:45:45.673 | E30AH | A1H |
| 18:45:40.161 | AAH | 18:45:42.643 | E30AH | A1H |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Zou, T.; Guo, L.; Zhang, C.; Zhang, L. Design and Implementation of a Generalized Safety Fault Diagnosis System for China Space Station Scientific Experimental Rack. Sensors 2024, 24, 5102. https://doi.org/10.3390/s24165102
Wang Y, Zou T, Guo L, Zhang C, Zhang L. Design and Implementation of a Generalized Safety Fault Diagnosis System for China Space Station Scientific Experimental Rack. Sensors. 2024; 24(16):5102. https://doi.org/10.3390/s24165102
Chicago/Turabian StyleWang, Yifeng, Tianji Zou, Lin Guo, Chenchen Zhang, and Lu Zhang. 2024. "Design and Implementation of a Generalized Safety Fault Diagnosis System for China Space Station Scientific Experimental Rack" Sensors 24, no. 16: 5102. https://doi.org/10.3390/s24165102
APA StyleWang, Y., Zou, T., Guo, L., Zhang, C., & Zhang, L. (2024). Design and Implementation of a Generalized Safety Fault Diagnosis System for China Space Station Scientific Experimental Rack. Sensors, 24(16), 5102. https://doi.org/10.3390/s24165102