
Study on the Impact of Pole Spacing on Magnetic Flux Leakage Detection under Oversaturated Magnetization
Abstract
:1. Introduction
2. Methods
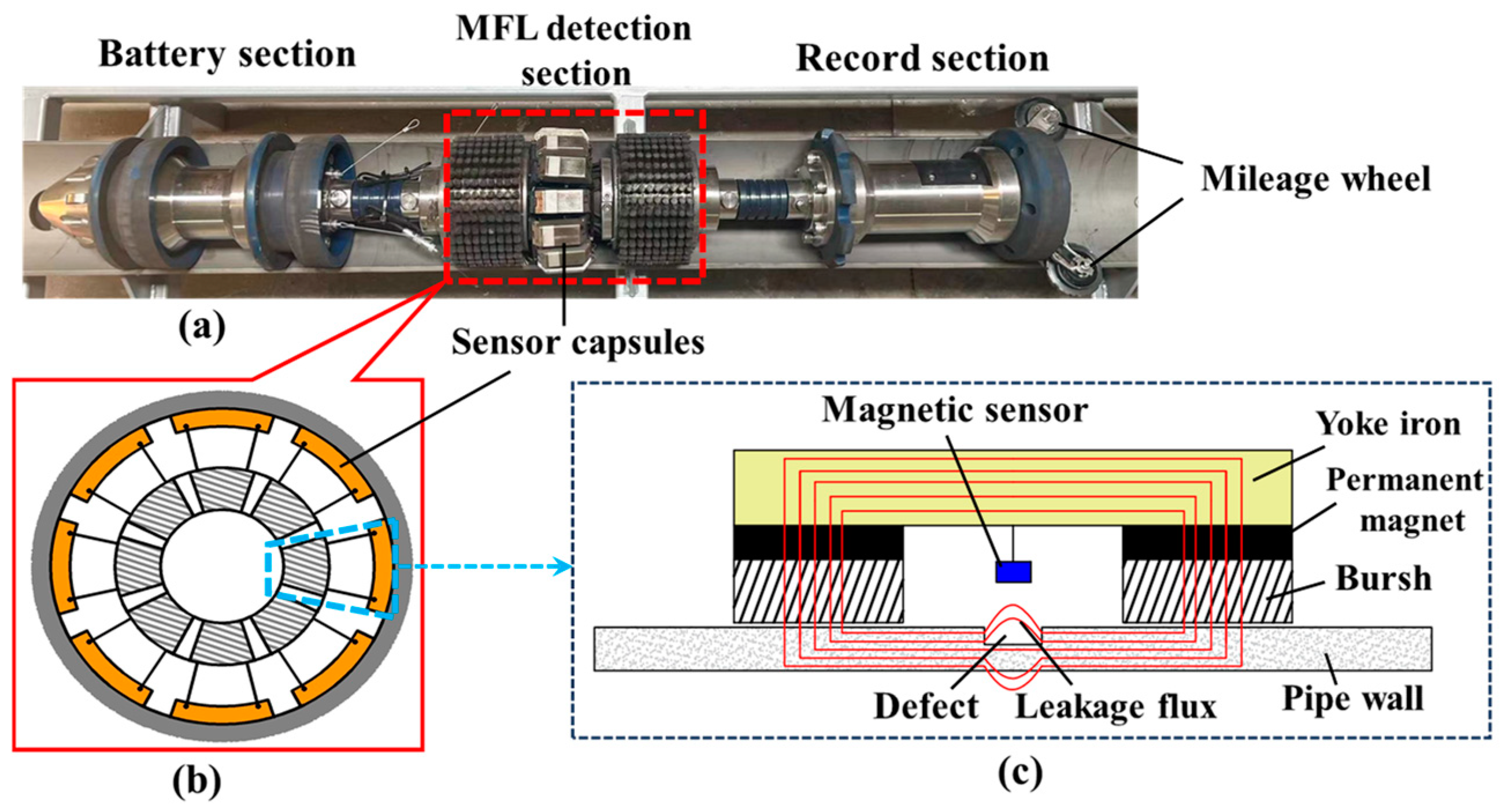
2.1. The Model of MFL Detection
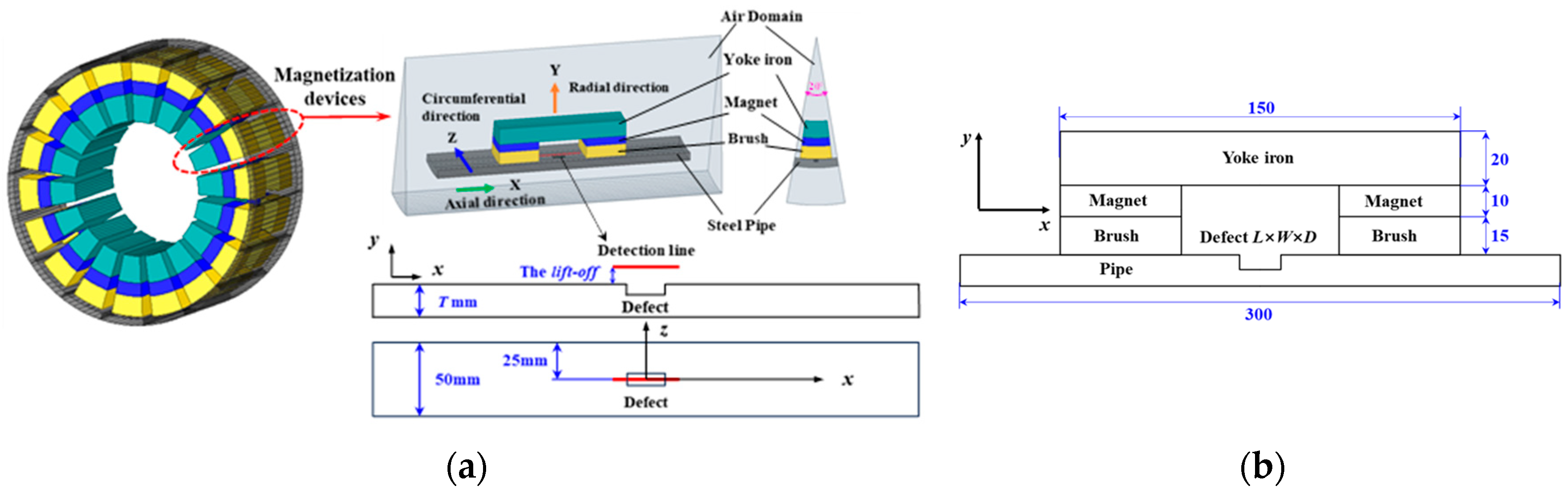
2.2. Finite Element Model of MFL Detection
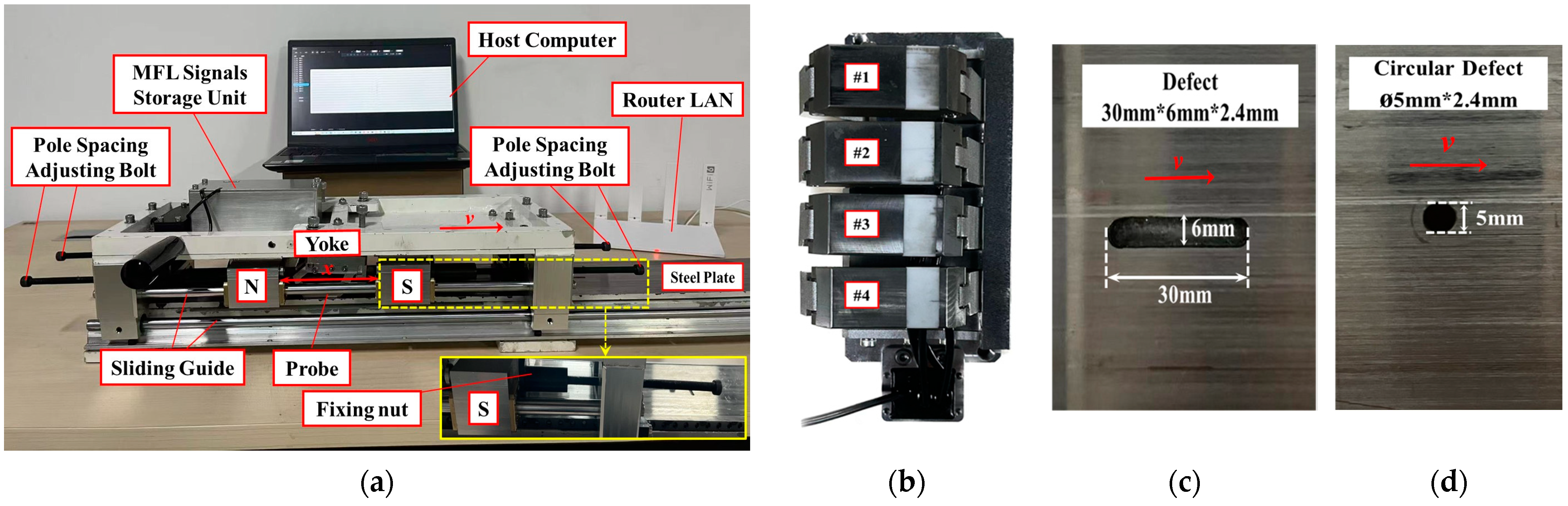
2.3. Physical Experiments
3. Results of Simulation and Experiments
3.1. FEM Simulation
3.1.1. For Rectangular Defects
3.1.2. For Circular Defects
3.2. Physical Experiments
4. Discussion
4.1. The Effect of Defect Depth on the Characteristics of MFL Signals
4.2. The Effect of Defect Length on the Characteristics of MFL Signals
4.3. The Effect of Wall Thickness on the Characteristics of MFL Signals
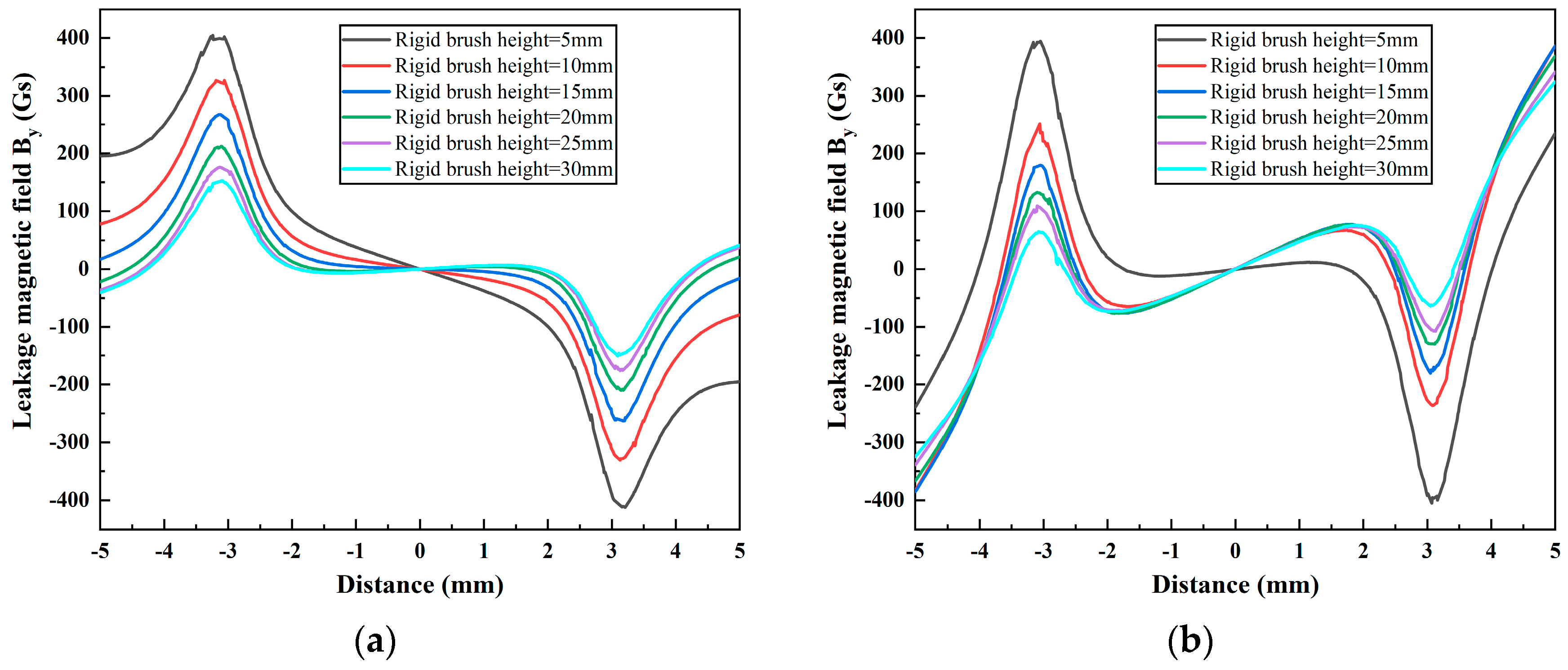
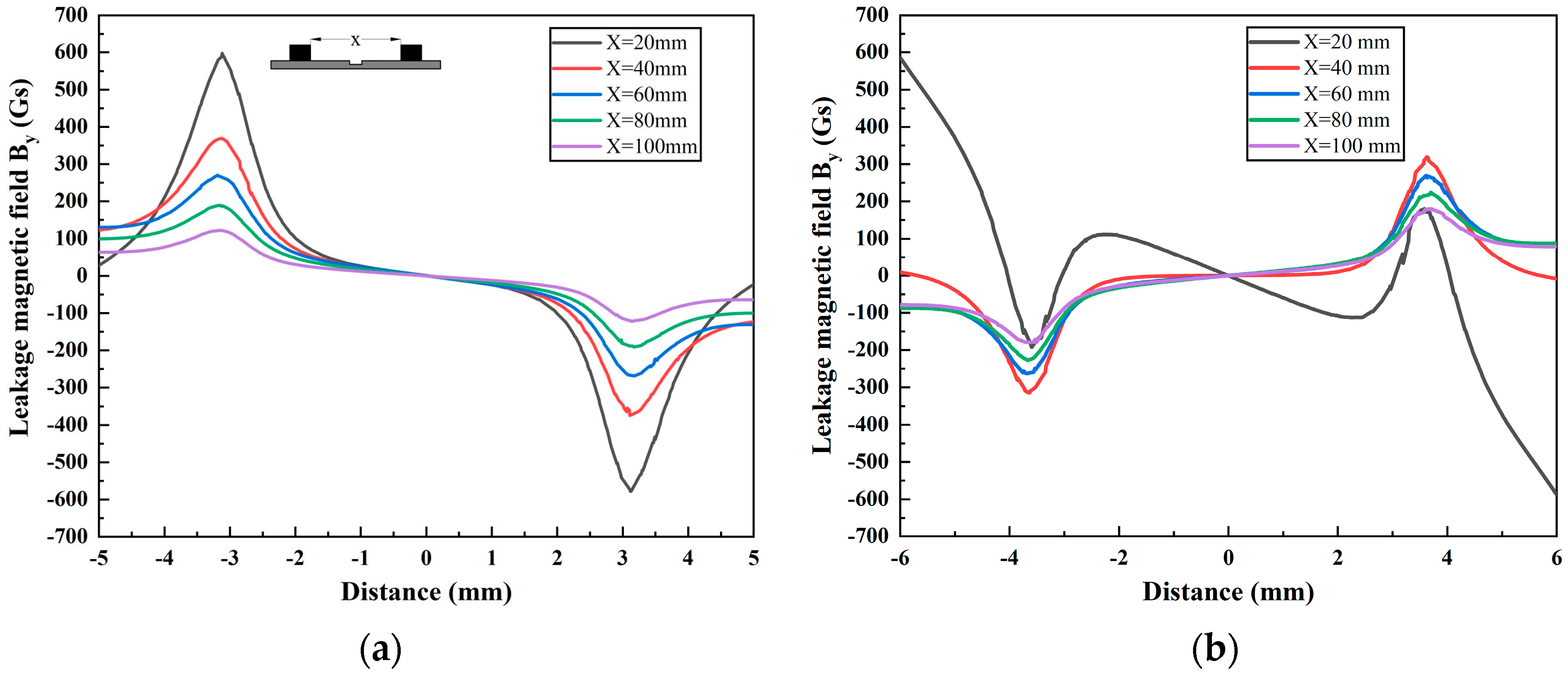
4.4. The Effect of the Geometrical Height of the Magnetic Pole and Rigid Brush on the Characteristics of MFL Signals
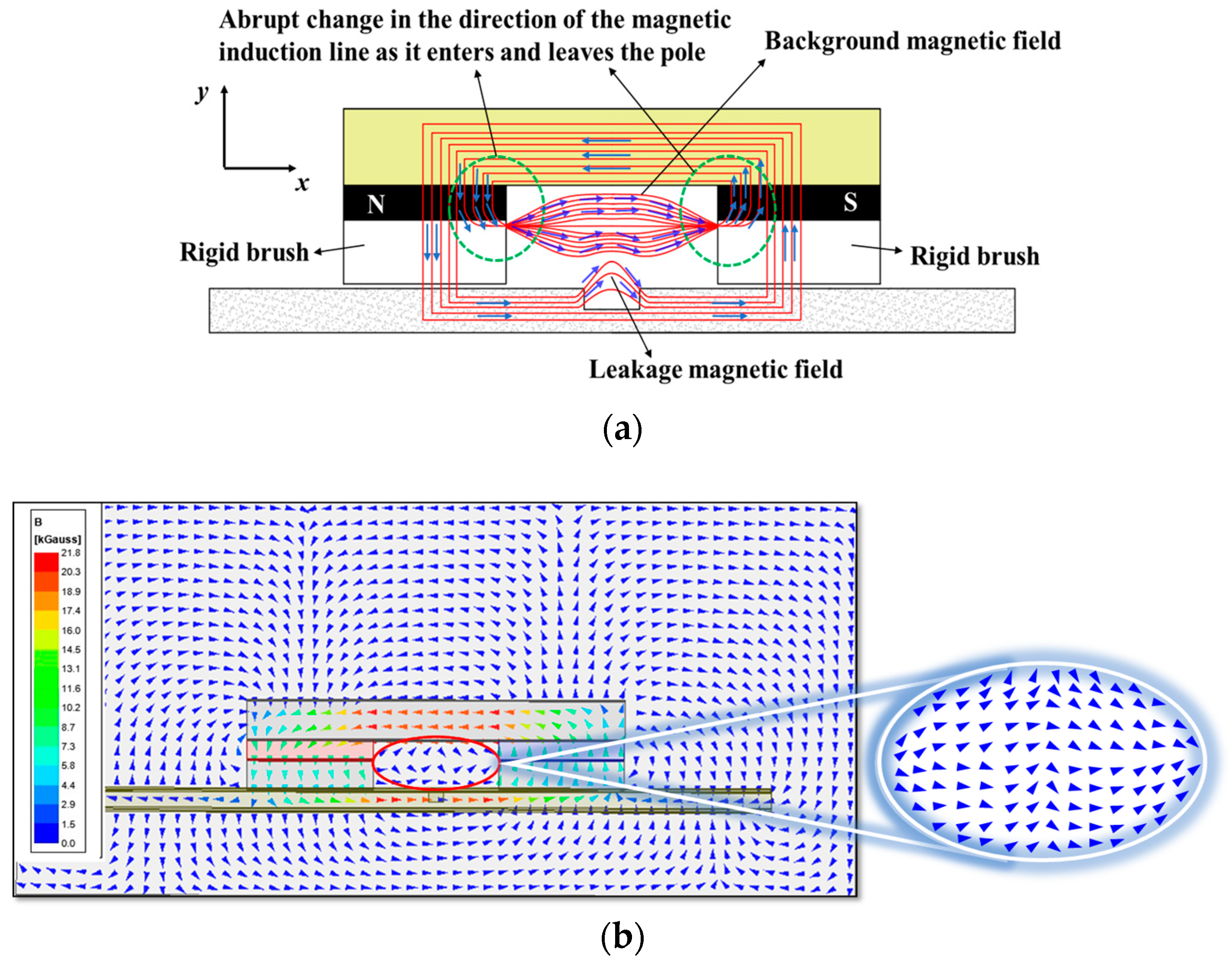
4.5. Theoretical Analysis of the Mechanisms of DPV Phenomena
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.G.; Jiang, L.; Liu, J.H.; Qu, F.M. Data Recovery of Magnetic Flux Leakage Data Gaps Using Multifeature Conditional Risk. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1064–1073. [Google Scholar] [CrossRef]
- Peng, X.; Anyaoha, U.; Liu, Z.; Tsukada, K. Analysis of Magnetic-Flux Leakage (MFL) Data for Pipeline Corrosion Assessment. IEEE Trans. Magn. 2020, 56, 15. [Google Scholar] [CrossRef]
- Kasai, N.; Maeda, T.; Tamura, K.; Kitsukawa, S.; Sekine, K. Application of risk curve for statistical analysis of backside corrosion in the bottom floors of oil storage tanks. Int. J. Press. Vessel. Pip. 2016, 141, 19–25. [Google Scholar] [CrossRef]
- Feng, B.; Wu, J.; Tu, H.; Tang, J.; Kang, Y. A Review of Magnetic Flux Leakage Nondestructive Testing. Materials 2022, 15, 7362. [Google Scholar] [CrossRef] [PubMed]
- Yigzew, F.E.; Kim, H.; Mun, S.; Park, S. Non-destructive damage detection for steel pipe scaffolds using MFL-based 3D defect visualization. J. Civ. Struct. Health Monit. 2024, 14, 501–509. [Google Scholar] [CrossRef]
- Jiang, L.; Zhang, H.G.; Liu, J.H.; Shen, X.K.; Xu, H. THMS-Net: A Two-Stage Heterogeneous Signals Mutual Supervision Network for MFL Weak Defect Detection. IEEE Trans. Instrum. Meas. 2022, 71, 9. [Google Scholar] [CrossRef]
- Kim, H.M.; Park, G.S. A New Sensitive Excitation Technique in Nondestructive Inspection for Underground Pipelines by Using Differential Coils. IEEE Trans. Magn. 2017, 53, 4. [Google Scholar] [CrossRef]
- Kopp, G.; Willems, H. Sizing limits of metal loss anomalies using tri-axial MFL measurements: A model study. NDT E Int. 2013, 55, 75–81. [Google Scholar] [CrossRef]
- Long, Y.; Huang, S.L.; Peng, L.S.; Wang, S.; Zhao, W. A Novel Compensation Method of Probe Gesture for Magnetic Flux Leakage Testing. IEEE Sens. J. 2021, 21, 10854–10863. [Google Scholar] [CrossRef]
- Wu, J.B.; Sun, Y.H.; Kang, Y.H.; Yang, Y. Theoretical Analyses of MFL Signal Affected by Discontinuity Orientation and Sensor-Scanning Direction. IEEE Trans. Magn. 2015, 51, 7. [Google Scholar]
- Wang, Y.J.; Melikhov, Y.; Meydan, T. Dipole modelling of temperature-dependent magnetic flux leakage. NDT E Int. 2023, 133, 9. [Google Scholar] [CrossRef]
- Liu, B.; Luo, N.; Feng, G. Quantitative Study on MFL Signal of Pipeline Composite Defect Based on Improved Magnetic Charge Model. Sensors 2021, 21, 3412. [Google Scholar] [CrossRef]
- Wu, L.B.; Yao, K.; Shi, P.P.; Zhao, B.X.; Wang, Y.S. Influence of inhomogeneous stress on biaxial 3D magnetic flux leakage signals. NDT E Int. 2020, 109, 17. [Google Scholar] [CrossRef]
- Antipov, A.G.; Markov, A.A. Using a Tail Field in High-Speed Magnetic Flux Leakage Testing. J. Nondestruct. Eval. 2022, 41, 9. [Google Scholar] [CrossRef]
- Feng, B.; Deng, K.X.; Wang, S.H.; Chen, S.K.; Kang, Y.H. Theoretical Analysis on the Distribution of Eddy Current in Motion-Induced Eddy Current Testing and High-Speed MFL Testing. J. Nondestruct. Eval. 2022, 41, 6. [Google Scholar] [CrossRef]
- Pullen, A.L.; Charlton, P.C.; Pearson, N.R.; Whitehead, N.J. Magnetic Flux Leakage Scanning Velocities for Tank Floor Inspection. IEEE Trans. Magn. 2018, 54, 8. [Google Scholar] [CrossRef]
- Pullen, A.L.; Charlton, P.C.; Pearson, N.R.; Whitehead, N.J. Practical evaluation of velocity effects on the magnetic flux leakage technique for storage tank inspection. Insight 2020, 62, 73–80. [Google Scholar] [CrossRef]
- Usarek, Z.; Chmielewski, M.; Piotrowski, L. Reduction of the Velocity Impact on the Magnetic Flux Leakage Signal. J. Nondestruct. Eval. 2019, 38, 7. [Google Scholar] [CrossRef]
- Peng, L.; Huang, S.; Wang, S.; Zhao, W. A Simplified Lift-Off Correction for Three Components of the Magnetic Flux Leakage Signal for Defect Detection. IEEE Trans. Instrum. Meas. 2021, 70, 6005109. [Google Scholar] [CrossRef]
- Feng, J.; Lu, S.; Liu, J.; Li, F. A Sensor Liftoff Modification Method of Magnetic Flux Leakage Signal for Defect Profile Estimation. IEEE Trans. Magn. 2017, 53, 6201813. [Google Scholar] [CrossRef]
- Liu, B.; Liang, Y.S.; He, L.Y.; Lian, Z.; Geng, H.; Yang, L.J. Quantitative study on the propagation characteristics of MFL signals of outer surface defects in long-distance oil and gas pipelines. NDT E Int. 2023, 137, 11. [Google Scholar] [CrossRef]
- Deng, Z.Y.; Sun, Y.H.; Yang, Y.; Kang, Y.H. Effects of surface roughness on magnetic flux leakage testing of micro-cracks. Meas. Sci. Technol. 2017, 28, 13. [Google Scholar] [CrossRef]
- Yousaf, J.; Harseno, R.W.; Kee, S.-H.; Yee, J.-J. Evaluation of the Size of a Defect in Reinforcing Steel Using Magnetic Flux Leakage (MFL) Measurements. Sensors 2023, 23, 5374. [Google Scholar] [CrossRef]
- Huang, S.; Wang, S. Magnetic Flux Leakage Testing. In New Technologies in Electromagnetic Non-Destructive Testing; Springer Series in Measurement Science and Technology; Springer: Singapore, 2016; pp. 185–222. [Google Scholar]
- Haifeng, L.; Xiuyan, W.; Renyang, H.; Tao, M.; Cunfu, H.; Bin, W. Study on simulation and experiment of magnetic flux leakage inspection for inner pipeline. Transducer Microsyst. Technol. 2009, 28, 61–64. [Google Scholar]
- Long, Y.; Huang, S.L.; Peng, L.S.; Wang, S.; Zhao, W. A Characteristic Approximation Approach to Defect Edge Detection in Magnetic Flux Leakage Testing. In Proceedings of the Joint Conference of Conference on Precision Electromagnetic Measurements (CPEM) and Conference of NCSL-International (NCSLI), Electr Network, Denver, CO, USA, 24–28 August 2020. [Google Scholar]
- Li, F.M.; Feng, J.; Zhang, H.G.; Liu, J.H.; Lu, S.X.; Ma, D.Z. Quick Reconstruction of Arbitrary Pipeline Defect Profiles from MFL Measurements Employing Modified Harmony Search Algorithm. IEEE Trans. Instrum. Meas. 2018, 67, 2200–2213. [Google Scholar] [CrossRef]
- Ji, F.Z.; Wang, C.L.; Sun, S.Y.; Wang, W.G. Application of 3-D FEM in the simulation analysis for MFL signals. Insight 2009, 51, 32–35. [Google Scholar] [CrossRef]
- Sun, Y.H.; Kang, Y.H. Magnetic compression effect in present MFL testing sensor. Sens. Actuator A-Phys. 2010, 160, 54–59. [Google Scholar] [CrossRef]
- Sun, Y.H.; Kang, Y.H. A new MFL principle and method based on near-zero background magnetic field. NDT E Int. 2010, 43, 348–353. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Materials | Permeability | Remanent Magnetization (T) |
|---|---|---|---|
| Magnet | Neodymium | 1 | 1.3 |
| Magnetizer | Iron | 5000 | - |
| Brush | Steel 1008 | 3000 | - |
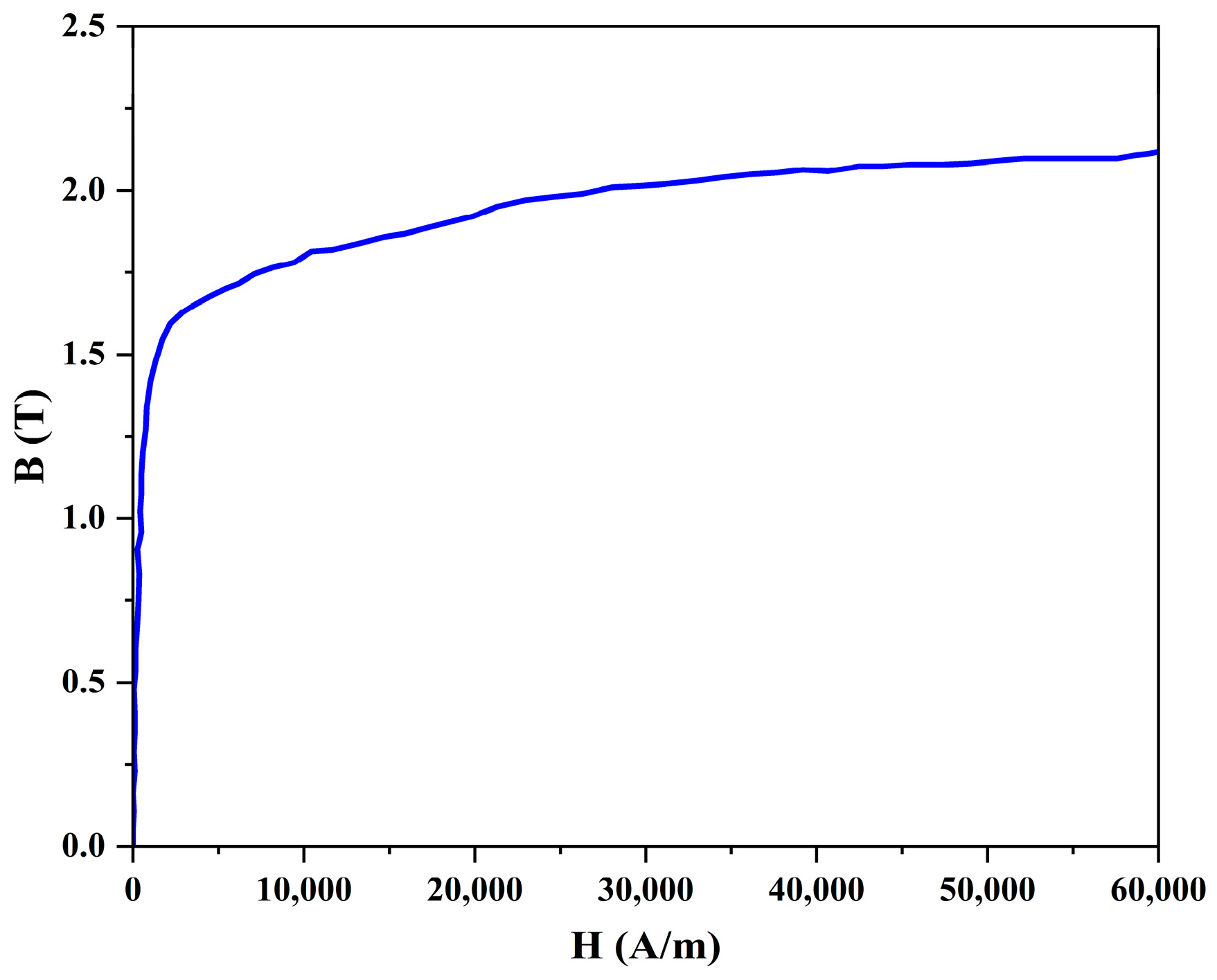
| Steel Pipe | Steel | B-H curve in Figure 3 | - |
| Air Domain | Air | 1 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Ren, L.; Tian, G. Study on the Impact of Pole Spacing on Magnetic Flux Leakage Detection under Oversaturated Magnetization. Sensors 2024, 24, 5195. https://doi.org/10.3390/s24165195
Liu W, Ren L, Tian G. Study on the Impact of Pole Spacing on Magnetic Flux Leakage Detection under Oversaturated Magnetization. Sensors. 2024; 24(16):5195. https://doi.org/10.3390/s24165195
Chicago/Turabian StyleLiu, Wenlong, Lemei Ren, and Guansan Tian. 2024. "Study on the Impact of Pole Spacing on Magnetic Flux Leakage Detection under Oversaturated Magnetization" Sensors 24, no. 16: 5195. https://doi.org/10.3390/s24165195