

50 Hz Temporal Magnetic Field Monitoring from High-Voltage Power Lines: Sensor Design and Experimental Validation
 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Current Existing Sensors
2.2. Circuit Design
2.2.1. Requirements
2.2.2. Circuit Exploration
2.3. Verification and Calibration
- (1)
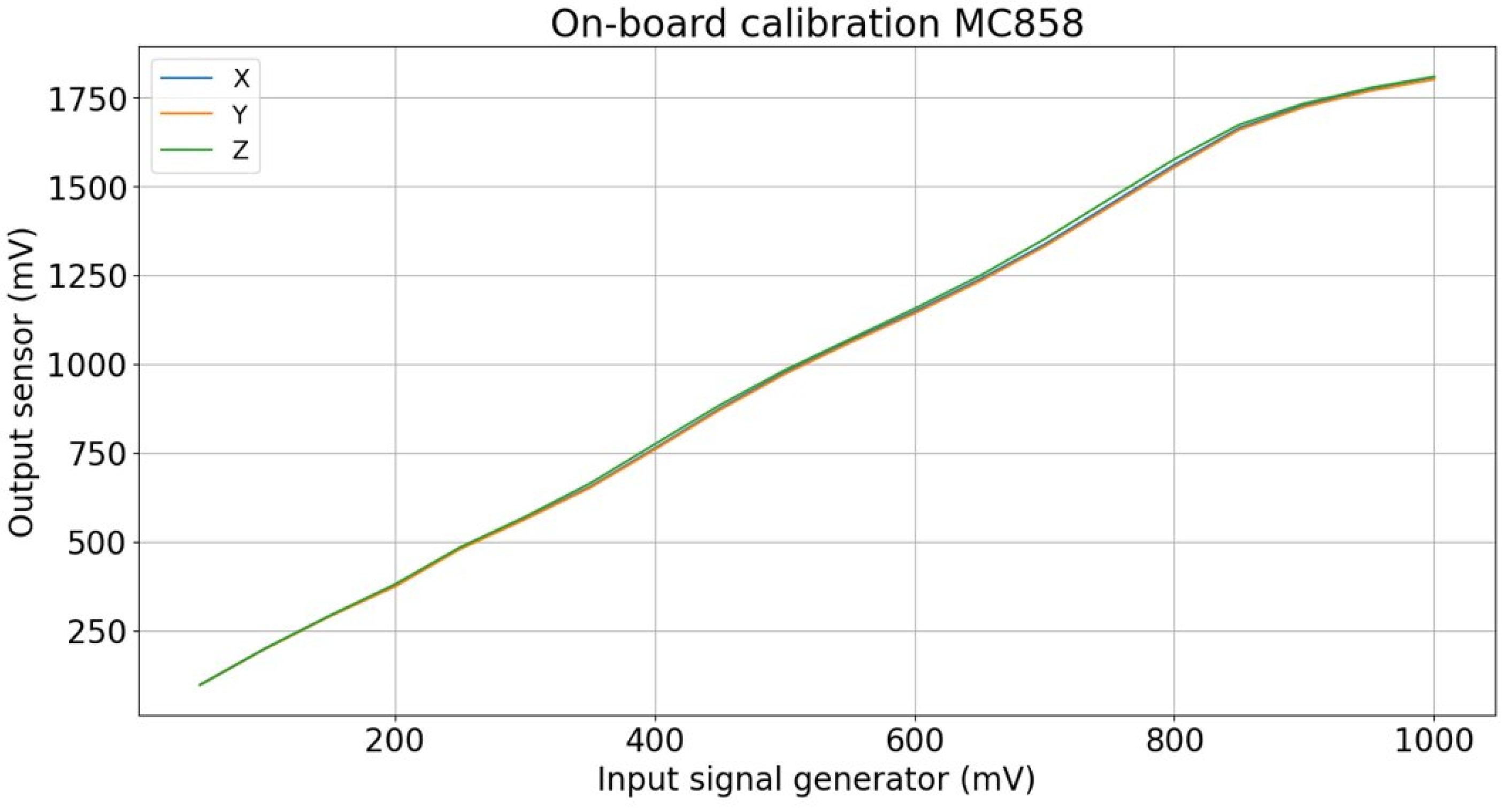
- An on-board calibration is performed. An amplitude sweep on a fixed frequency (50 Hz) is sent into the board, the output is captured by the microcontroller. Then, the output is compared to the input and is stored in a look-up-table (LUT). This calibration takes the circuit attenuation, noise and parasitic components into account.
- (2)
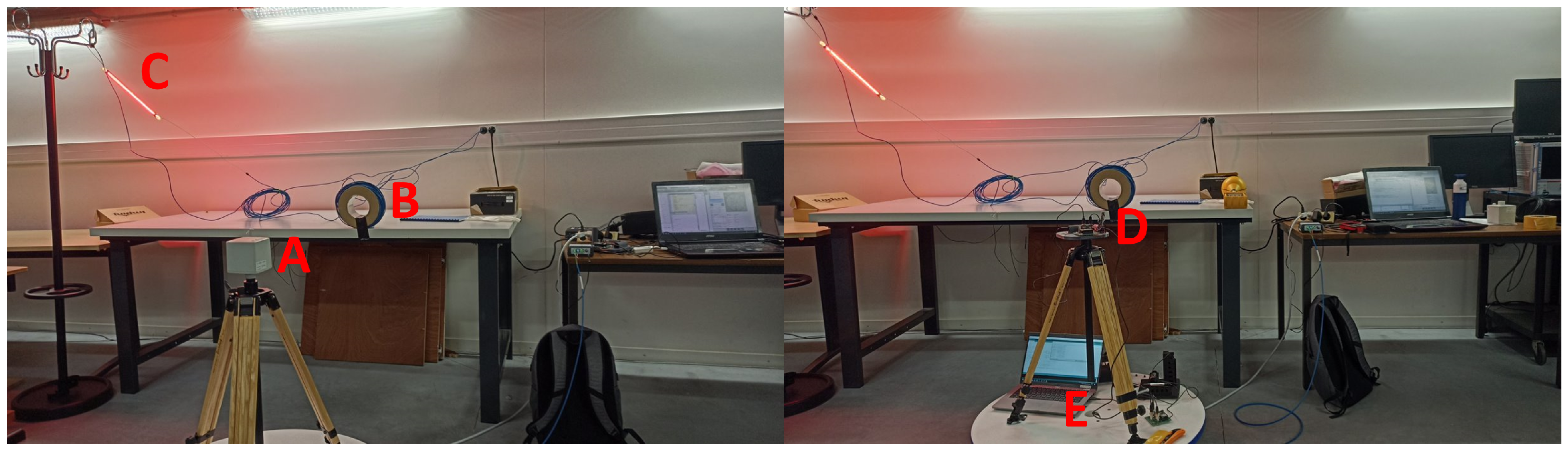
- An in-lab calibration is performed. The full sensor (coils + PCB) is calibrated by rotating the sensor twice while a dominant, 50 Hz source is nearby. The source in this case is a heat lamp of 1.8 kW with a twisted 20 m coil (circumference: 20 cm) to strengthen the field (Figure 3). The sensor was fixed at the same height as the coil on a wooden three-piece, which was standing on a turntable. The turntable rotated at 2 degrees per second, first clockwise, then counterclockwise. The entire calibration lasts 6 min. The rotation was performed to take the location dependence of the coils into account, as these could not all be centered in the sensor. A maximal linear displacement of 6 cm of the coils is obtained due to the rotation.
3. Results
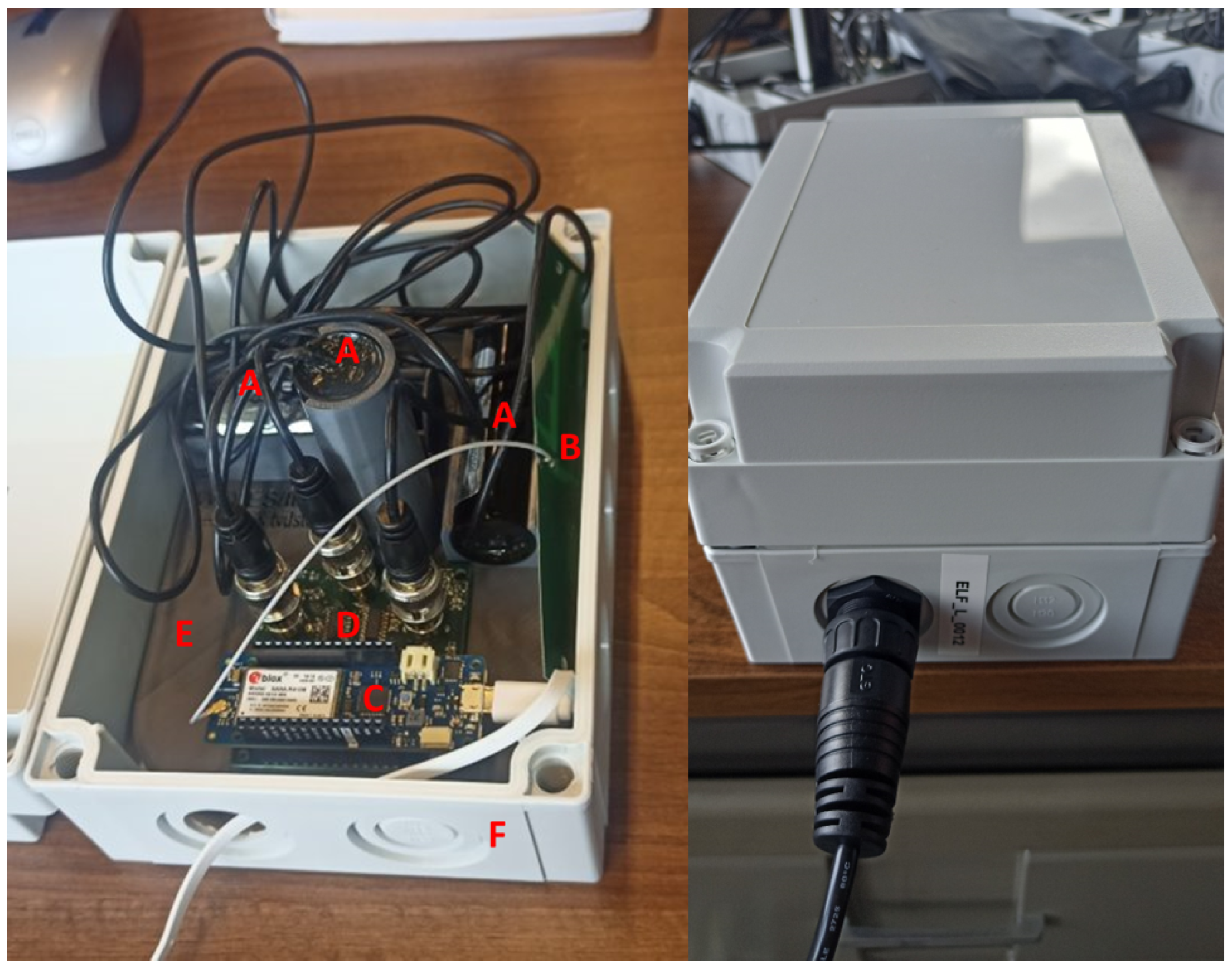
3.1. Circuit Design and Sensor Design
3.2. Calibration
- -
- 0.4 µT range (0.08 µT to 58 µT), with a minimal single axis step response of 2 nT.
- -
- 100 µT range (0.1 µT to 364 µT), with a minimal single step response 13 nT.
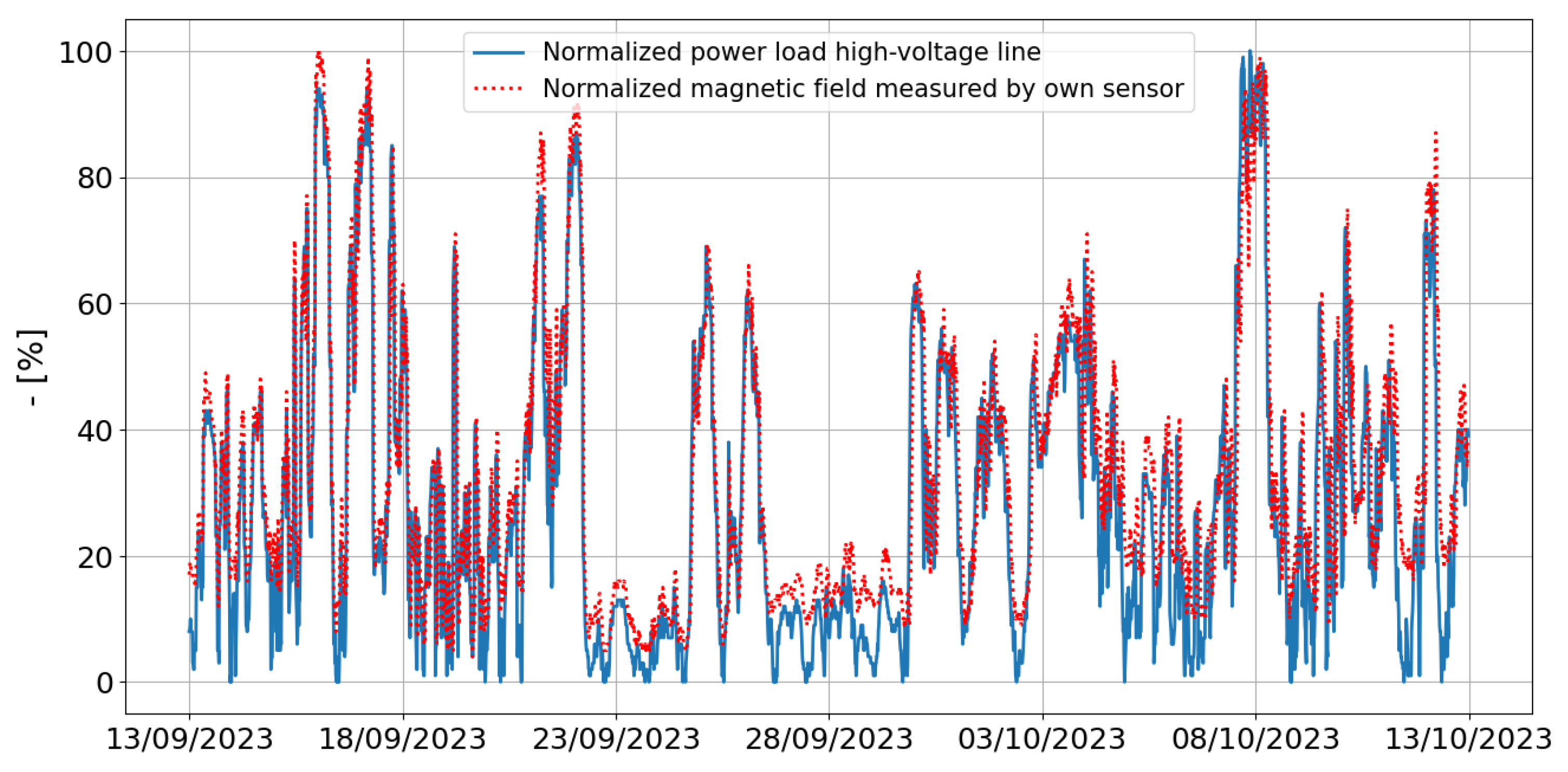
3.3. In-Field Validation
3.3.1. Validation in Residential Area
3.3.2. Validation in Industrial Area
3.3.3. Validation in Power Distribution Sub-Station
3.3.4. Comparison of Measured Values to Literature
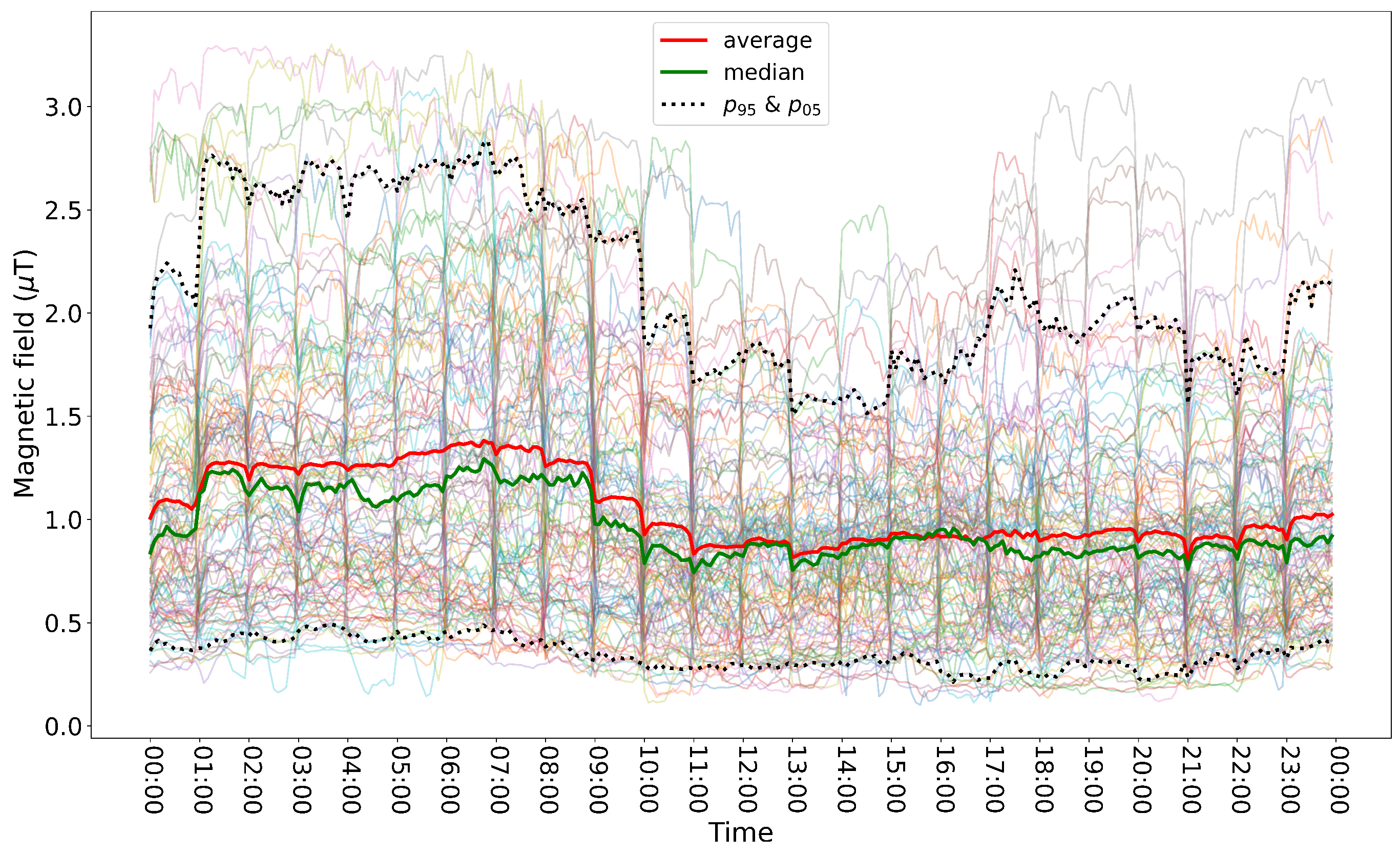
4. Long-Term Monitoring
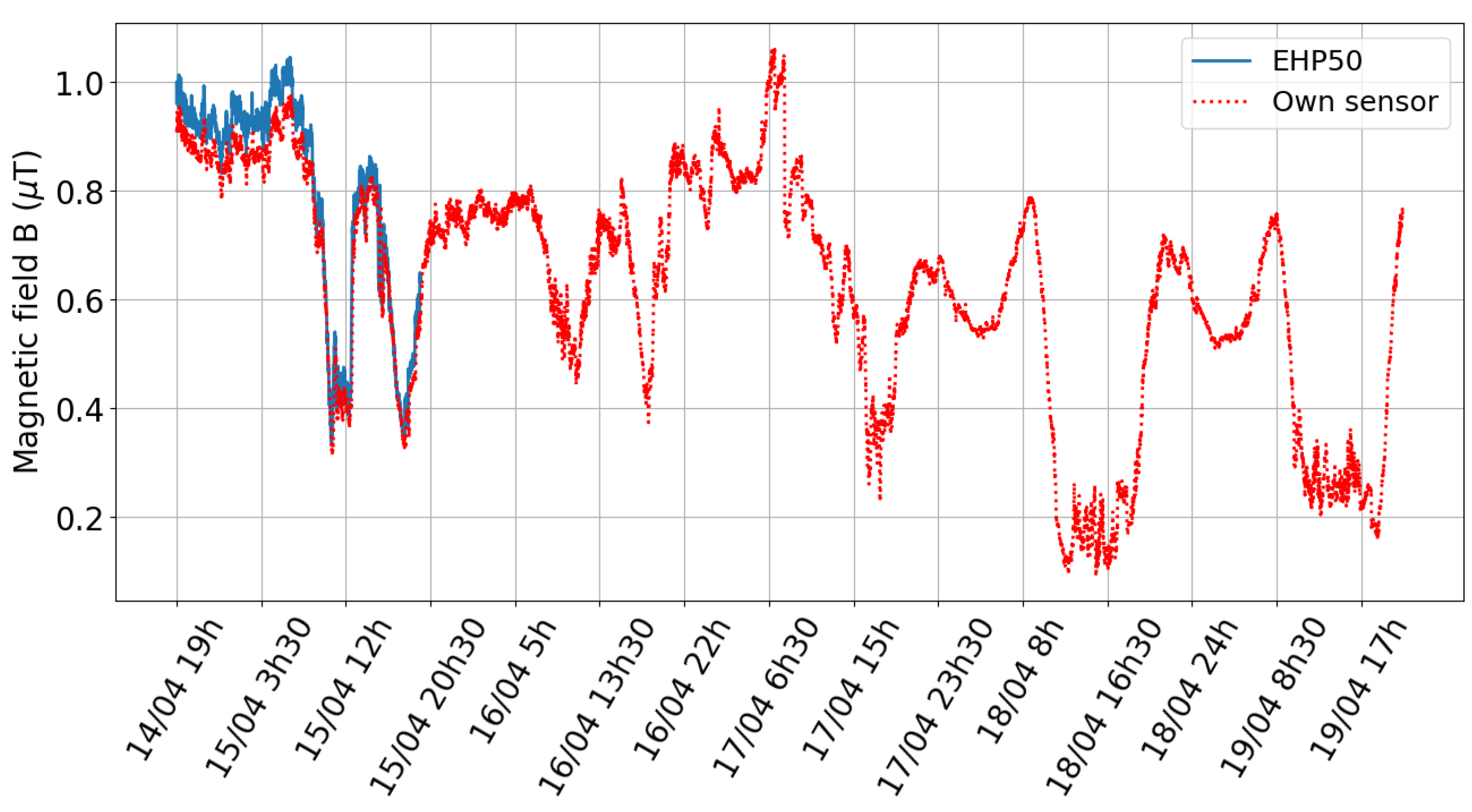
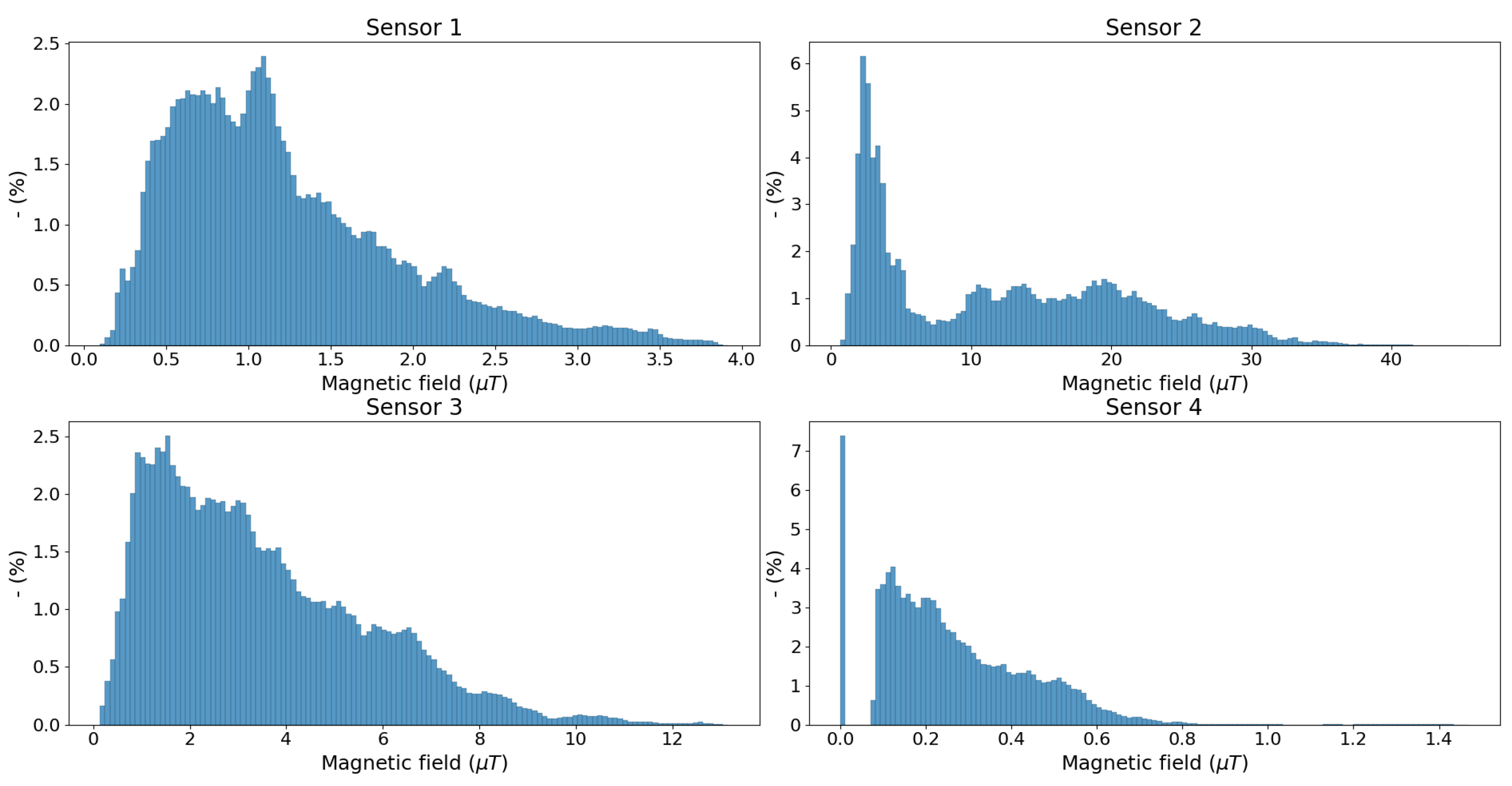
4.1. Sensor Tested during 118 Days
4.2. Monitoring Network
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Commission on Non-Ionizing Radiation Protection. Guidelines for limiting exposure to time-varying electric and magnetic fields (1 Hz TO 100 kHz). Health Phys. 2010, 99, 818–836. [Google Scholar] [CrossRef]
- Mezei, G.; Gadallah, M.; Kheifets, L. Residential Magnetic Field Exposure and Childhood Brain Cancer: A Meta-Analysis. Epidemiology 2008, 19, 424–430. [Google Scholar] [CrossRef]
- Elliott, P.; Shaddick, G.; Douglass, M.; Hoogh, K.D.; Briggs, D.J.; Toledano, M.B. Adult cancers near high-voltage overhead power lines. Epidemiology 2013, 24, 184–190. [Google Scholar] [CrossRef]
- Zhao, L.; Liu, X.; Wang, C.; Yan, K.; Lin, X.; Li, S.; Bao, H.; Liu, X. Magnetic fields exposure and childhood leukemia risk: A meta-analysis based on 11,699 cases and 13,194 controls. Leuk. Res. 2014, 38, 269–274. [Google Scholar] [CrossRef]
- Seomun, G.A.; Lee, J.; Park, J. Exposure to extremely low-frequency magnetic fields and childhood cancer: A systematic review and meta-analysis. PLoS ONE 2021, 16, e0251628. [Google Scholar] [CrossRef] [PubMed]
- Binboğa, E.; Tok, S.; Munzuroğlu, M. The Short-Term Effect of Occupational Levels of 50 Hz Electromagnetic Field on Human Heart Rate Variability. Bioelectromagnetics 2021, 42, 60–75. [Google Scholar] [CrossRef]
- Tynes, T.; Haldorsen, T. Residential and occupational exposure to 50 Hz magnetic fields and hematological cancers in Norway. Cancer Causes Control 2003, 14, 715–720. [Google Scholar] [CrossRef]
- Linet, M.S.; Hatch, E.E.; Kleinerman, R.A.; Robison, L.L.; Kaune, W.T.; Friedman, D.R.; Severson, R.K.; Haines, C.M.; Hartsock, C.T.; Niwa, S.; et al. Residential Exposure to Magnetic Fields and Acute Lymphoblastic Leukemia in Children. N. Engl. J. Med. 1997, 337, 1–7. [Google Scholar] [CrossRef]
- Reitan, J.B.; Tynes, T.; Kvamshagen, K.A.; Vistnes, A.I. High-voltage overhead power lines in epidemiology: Patterns of time variations in current load and magnetic fields. Bioelectromagnetics 1996, 17, 209–217. [Google Scholar] [CrossRef]
- Vistnes, A.I.; Ramberg, G.B.; Bjørnevik, L.R.; Tynes, T.; Haldorsen, T. Exposure of Children to Residential Magnetic Fields in Norway: Is Proximity to Power Lines an Adequate Predictor of Exposure? Bioelectromagnetics 1997, 18, 47–57. [Google Scholar] [CrossRef]
- International Commission on Non-Ionizing Radiation Protection (ICNIRP). Guidelines on Limiting Exposure to Non-Ionizing Radiation: A Reference Book Based on the Guidelines on Limiting Exposure to Non-Ionizing Radiation and Statements on Special Applications; ICNIRP: Munich, Germany, 1999. [Google Scholar]
- European Union (UE) Council Recommendation. Council Recommendation of 12 July 1999 on the Limitation of Exposure of the General Public to Electromagnetic Fields (0 Hz to 300 GHz)—(1999/519/EC); Council of the European Union: Brussels, Belgium, 1999. [Google Scholar]
- Gajšek, P.; Ravazzani, P.; Grellier, J.; Samaras, T.; Bakos, J.; Thuróczy, G. Review of studies concerning electromagnetic field (EMF) exposure assessment in Europe: Low frequency fields (50 Hz–100 kHz). Int. J. Environ. Res. Public Health 2016, 13, 875. [Google Scholar] [CrossRef]
- Bonato, M.; Chiaramello, E.; Parazzini, M.; Gajsek, P.; Ravazzani, P. Extremely Low Frequency Electric and Magnetic Fields Exposure: Survey of Recent Findings. IEEE J. Electromagn. RF Microw. Med. Biol. 2023, 7, 216–228. [Google Scholar] [CrossRef]
- Rahman, N.A.; Rashid, N.A.; Mahadi, W.N.; Rasol, Z. Magnetic field exposure assessment of electric power substation in high rise building. J. Appl. Sci. 2011, 11, 953–961. [Google Scholar] [CrossRef]
- Joseph, W.; Verloock, L.; Martens, L. General public exposure by ELF fields of 150-36/11-kV substations in urban environment. IEEE Trans. Power Deliv. 2009, 24, 642–649. [Google Scholar] [CrossRef]
- Joseph, W.; Verloock, L.; Martens, L. Measurements of elf electromagnetic exposure of the general public from Belgian power distribution substations. Health Phys. 2008, 94, 57–66. [Google Scholar] [CrossRef] [PubMed]
- Touitou, Y.; Lambrozo, J.; Camus, F.O.; Charbuy, H. Magnetic fields and the melatonin hypothesis: A study of workers chronically exposed to 50-Hz magnetic fields. Am. J. Physiol. Regul. Integr. Comp. Physiol. 2003, 284, R1529–R1535. [Google Scholar] [CrossRef]
- Keikko, T.; Kuusiluoma, S.; Sauramäki, T.; Korpinen, L. Comparison of electric and magnetic fields near 400 kV electric substation with exposure recommendations of the European union. Proc. IEEE Power Eng. Soc. Transm. Distrib. Conf. 2002, 2, 1230–1234. [Google Scholar] [CrossRef]
- Benes, M.; Comelli, M.; Bampo, A.; Villalta, R. Power Lines Typologies and ELF Measurement Procedures. In Proceedings of the 2nd European IRPA Congress on Radiation Protection—Radiation Protection: From Knowledge to Action, Paris, France, 15–19 May 2006. [Google Scholar]
- Levallois, P.; Gauvin, D.; Gingras, S.; St-Laurent, J. Comparison between personal exposure to 60 Hz magnetic fields and stationary home measurements for people living near and away from a 735 kV power line. Bioelectromagnetics 1999, 20, 331–337. [Google Scholar] [CrossRef]
- Halgamuge, M.N.; McLean, L. Measurement and analysis of power-frequency magnetic fields in residences: Results from a pilot study. Measurement 2018, 125, 415–424. [Google Scholar] [CrossRef]
- Straume, A.; Johnsson, A.; Oftedal, G. ELF-magnetic flux densities measured in a city environment in summer and winter. Bioelectromagnetics 2008, 29, 20–28. [Google Scholar] [CrossRef]
- Nicolaou, C.P.; Papadakis, A.P.; Razis, P.A.; Kyriacou, G.A.; Sahalos, J.N. Measurements and predictions of electric and magnetic fields from power lines. Electr. Power Syst. Res. 2011, 81, 1107–1116. [Google Scholar] [CrossRef]
- Tanaka, K.; Mizuno, Y.; Naito, K. Measurement of power frequency electric and magnetic fields near power facilities in several countries. IEEE Trans. Power Deliv. 2011, 26, 1508–1513. [Google Scholar] [CrossRef]
- Abuasbi, F.; Lahham, A.; Abdel-Raziq, I.R. Residential exposure to extremely low frequency electric and magnetic fields in the city of Ramallah-Palestine. Radiat. Prot. Dosim. 2018, 179, 49–57. [Google Scholar] [CrossRef] [PubMed]
- Dâamore, G.; Anglesio, L.; Tasso, M.; Benedetto, A.; Roletti, S. Outdoor Background ELF Magnetic Fields in an Urban Environment. 2001. Available online: https://academic.oup.com/rpd/article/94/4/375/1677603 (accessed on 14 April 2024).
- Röösli, M.; Jenni, D.; Kheifets, L.; Mezei, G. Extremely low frequency magnetic field measurements in buildings with transformer stations in Switzerland. Sci. Total Environ. 2011, 409, 3364–3369. [Google Scholar] [CrossRef] [PubMed]
- Liorni, I.; Parazzini, M.; Struchen, B.; Fiocchi, S.; Röösli, M.; Ravazzani, P. Children’s personal exposure measurements to extremely low frequency magnetic fields in Italy. Int. J. Environ. Res. Public Health 2016, 13, 549. [Google Scholar] [CrossRef] [PubMed]
- Ozen, S. Evaluation and measurement of magnetic field exposure at a typical high-voltage substation and its power lines. Radiat. Prot. Dosim. 2008, 128, 198–205. [Google Scholar] [CrossRef]
- Al-Bassam, E.; Elumalai, A.; Khan, A.; Al-Awadi, L. Assessment of electromagnetic field levels from surrounding high-tension overhead power lines for proposed land use. Environ. Monit. Assess. 2016, 188, 316. [Google Scholar] [CrossRef]
- Kaune, W.T. Assessing Human Exposure to Power-Frequency Electric and Magnetic Fields. Environ. Health Perspect. 1993, 101 (Suppl. 4), 121–133. [Google Scholar] [CrossRef]
- Deshayes-Pinçon, F.; Morlais, F.; Roth-Delgado, O.; Merckel, O.; Lacour, B.; Launoy, G.; Launay, L.; Dejardin, O. Estimation of the general population and children under five years of age in France exposed to magnetic field from high or very high voltage power line using geographic information system and extrapolated field data. Environ. Res. 2023, 232, 116425. [Google Scholar] [CrossRef]
- Aerts, S.; Vermeeren, G.; den Bossche, M.V.; Aminzadeh, R.; Verloock, L.; Thielens, A.; Leroux, P.; Bergs, J.; Braem, B.; Philippron, A.; et al. Lessons Learned from a Distributed RF-EMF Sensor Network. Sensors 2022, 22, 1715. [Google Scholar] [CrossRef]
- Deprez, K.; Colussi, L.; Korkmax, E.; Aerts, S.; Land, D.; Littel, S.; Verloock, L.; Plets, D.; Joseph, W.; Bolte, J. Comparison of Low-Cost 5G Electromagnetic Field Sensors. Sensors 2023, 23, 3312. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, C.; Sebastiao, D.; Carpinteiro, C.; Correia, L.M.; Fernandes, C.A.; Serrala, A.; Marques, N. The moniT Project: Electromagnetic Radiation Exposure Assessment in Mobile Communications. IEEE Antennas Propag. Mag. 2007, 49, 44–53. [Google Scholar] [CrossRef]
- Djuric, N.; Kljajic, D.; Kasas-Lazetic, K.; Bajovic, V. The SEMONT continuous monitoring of daily EMF exposure in an open area environment. Environ. Monit. Assess. 2015, 187, 1–17. [Google Scholar] [CrossRef] [PubMed]
- Gotsis, A.; Papanikolaou, N.; Komnakos, D.; Yalofas, A.; Constantinou, P. Non-ionizing electromagnetic radiation monitoring in Greece. Ann. Telecommun.-Ann. Télécommun. 2008, 63, 109–123. [Google Scholar] [CrossRef]
- Manassas, A.; Boursianis, A.; Samaras, T.; Sahalos, J.N. Continuous electromagnetic radiation monitoring in the environment: Analysis of the results in Greece. Radiat. Prot. Dosim. 2012, 151, 437–442. [Google Scholar] [CrossRef] [PubMed]
- Troisi, F.; Boumis, M.; Grazioso, P. The Italian national electromagnetic field monitoring network. Ann. Telecommun.—Ann. Télécommun. 2008, 63, 97–108. [Google Scholar] [CrossRef]
- Tumanski, S. Induction coil sensors—A review. Meas. Sci. Technol. 2007, 18, R31–R46. [Google Scholar] [CrossRef]
- Merchant, C.J.; Renew, D.C.; Swanson, J. Exposures to power-frequency magnetic fields in the home. J. Radiol. Prot. 1993, 14, 77. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Frequency Range | Axis | Magnetic Field Measurement Range | Electric Field Measurement Range | Price | Additional Features |
|---|---|---|---|---|---|---|
| EHP-50 | 1 Hz–400 kHz | 3 | 0.3 nT–10 mT | 5 mV/m–100 kV/m | €€€€€ | Datalogging up to 36 h |
| ELT-400 | 1 Hz–400 kHz | 3 | 1 nT–320 µT OR 10 µT–80 mT | 100 V/m OR 50 kV/m | €€€€ | Comparison to standards on device |
| NFA30M | 16 Hz–30 kHz | 3 | 1 nT–20 µT | 0.1–2000 V/m | €€ | Datalogging up to 48 h, max hold |
| EMDEX II | 40 Hz–800 Hz | 3 | 0.01 µT–300 µT | / | €€€ | Battery up to 7 days |
| Extech 480823 | 30 Hz–300 Hz | 1 | 0.01 tot 20 µT | / | € | Hand-held device |
| Tenmars TM-190 | 50/60 Hz | 3 | 0.01 µT–20 µT OR 0.1 µT–200 µT | 1 V/m–2000 V/m | € | Can measure ELF and RF |
| Tenmars TM-191 | 30 Hz–300 Hz | 1 | 0.01 µT–20 µT OR 0.1 µT–200 µT | / | € | Hand-held device, max hold |
| Tenmars TM-192D | 30 Hz–2kHz | 3 | 0.001 µT–2 µT OR 0.01 µT–20 µT OR 0.1 µT–200 µT | / | € | Hand-held device, max hold 9999 data logs |
| Proposed sensor, minimal requirements | 10 Hz–300 Hz | 3 | 0.1 µT to 200 µT | / | €/€€ | IoT connectivity long-term datalogging |
| Test 1 (µT) | Deviation w.r.t. EHP-50 Test 1 (%) | Test 2 (µT) | Deviation w.r.t. EHP-50 Test 2 (%) | |
|---|---|---|---|---|
| EHP-50 | 30.94 | 1.66 | ||
| SENSOR01 | 19.47 | 62.9 | 1.06 | 63.4 |
| SENSOR 02 | 19.58 | 63.3 | 1.06 | 63.6 |
| SENSOR 03 | 19.61 | 63.4 | 1.06 | 63.4 |
| SENSOR 04 | 19.75 | 63.8 | 1.05 | 63.4 |
| SENSOR 05 | 19.65 | 63.5 | 1.06 | 63.6 |
| SENSOR 06 | 19.69 | 63.6 | 1.05 | 63.1 |
| SENSOR 07 | 19.45 | 62.9 | 1.05 | 63.0 |
| SENSOR 08 | 19.61 | 63.4 | 1.06 | 63.4 |
| SENSOR 09 | 19.53 | 63.1 | 1.05 | 63.1 |
| SENSOR 10 | 19.57 | 63.2 | 1.05 | 63.1 |
| SENSOR 11 | 19.67 | 63.6 | 1.06 | 63.7 |
| SENSOR 12 | 19.51 | 63.0 | 1.06 | 63.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Deprez, K.; Van de Steene, T.; Verloock, L.; Tanghe, E.; Gommé, L.; Verlaek, M.; Goethals, M.; van Campenhout, K.; Plets, D.; Joseph, W. 50 Hz Temporal Magnetic Field Monitoring from High-Voltage Power Lines: Sensor Design and Experimental Validation. Sensors 2024, 24, 5325. https://doi.org/10.3390/s24165325
Deprez K, Van de Steene T, Verloock L, Tanghe E, Gommé L, Verlaek M, Goethals M, van Campenhout K, Plets D, Joseph W. 50 Hz Temporal Magnetic Field Monitoring from High-Voltage Power Lines: Sensor Design and Experimental Validation. Sensors. 2024; 24(16):5325. https://doi.org/10.3390/s24165325
Chicago/Turabian StyleDeprez, Kenneth, Tom Van de Steene, Leen Verloock, Emmeric Tanghe, Liesbeth Gommé, Mart Verlaek, Michel Goethals, Karen van Campenhout, David Plets, and Wout Joseph. 2024. "50 Hz Temporal Magnetic Field Monitoring from High-Voltage Power Lines: Sensor Design and Experimental Validation" Sensors 24, no. 16: 5325. https://doi.org/10.3390/s24165325