Abstract
In recent years, the safety issues of high-speed railways have remained severe. The intrusion of personnel or obstacles into the perimeter has often occurred in the past, causing derailment or parking, especially in the case of bad weather such as fog, haze, rain, etc. According to previous research, it is difficult for a single sensor to meet the application needs of all scenario, all weather, and all time domains. Due to the complementary advantages of multi-sensor data such as images and point clouds, multi-sensor fusion detection technology for high-speed railway perimeter intrusion is becoming a research hotspot. To the best of our knowledge, there has been no review of research on multi-sensor fusion detection technology for high-speed railway perimeter intrusion. To make up for this deficiency and stimulate future research, this article first analyzes the situation of high-speed railway technical defense measures and summarizes the research status of single sensor detection. Secondly, based on the analysis of typical intrusion scenarios in high-speed railways, we introduce the research status of multi-sensor data fusion detection algorithms and data. Then, we discuss risk assessment of railway safety. Finally, the trends and challenges of multi-sensor fusion detection algorithms in the railway field are discussed. This provides effective theoretical support and technical guidance for high-speed rail perimeter intrusion monitoring.
1. Outline
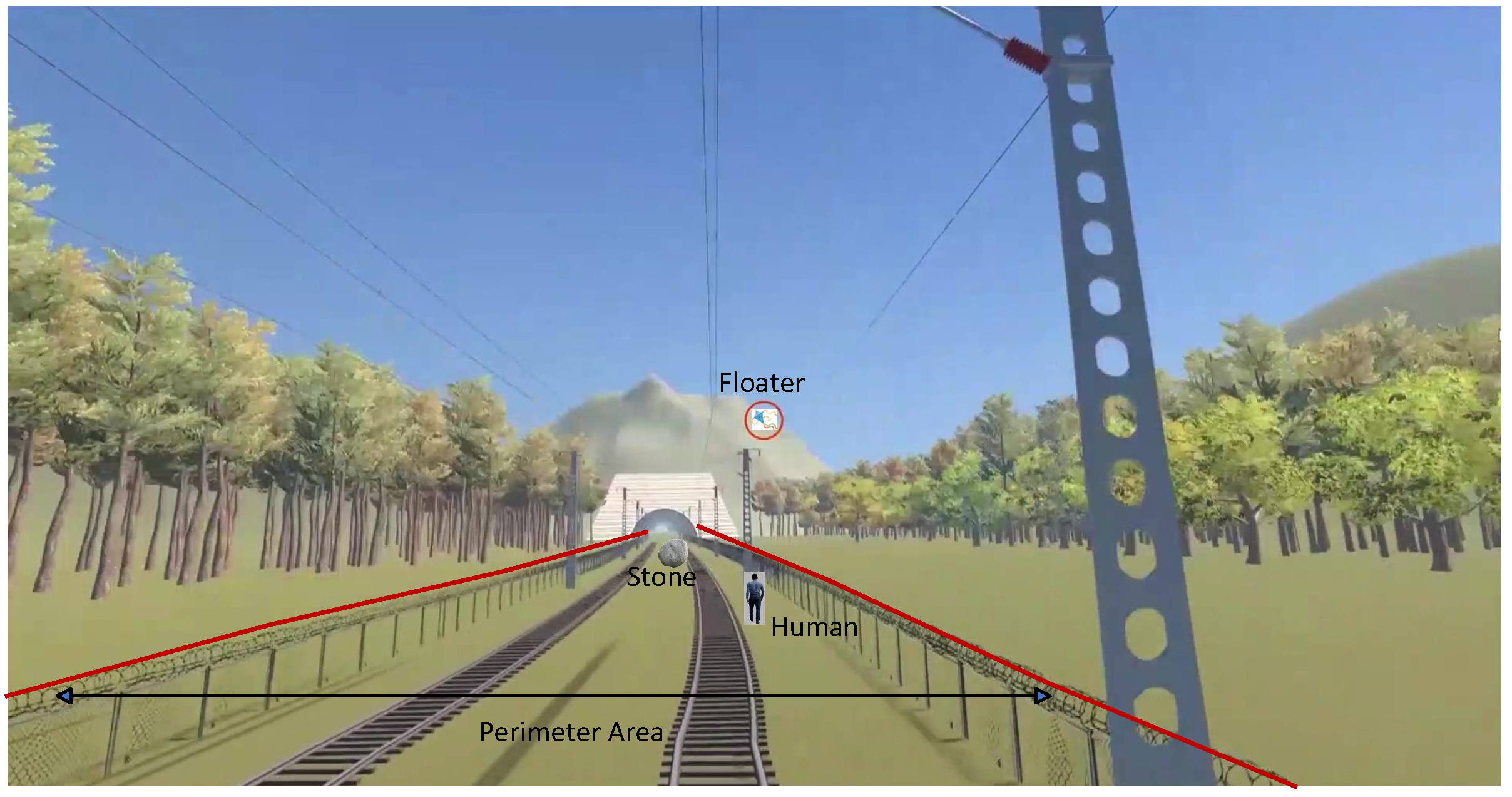
According to the International Union of Railways [1], the total mileage of the world’s railways has reached 1.1 million kilometers, of which the total mileage of high-speed railways reached 59,000 km by the end of 2022. The complexity of terrain or the negligence or subjective malice of relevant actors can lead to the existence of uncontrollable risk points along a railway. The factors that affect the safety of railway systems are diverse, including locomotive parts [2], rail conditions [3], wireless networks [4], station management [5], and track safety [6]. This research focuses on track safety. The high-speed railway perimeter is an important protective area along the track, excluding the stations. The high-speed railway perimeter [7] is the boundary of the high-speed railway line area that needs to be physically protected or electronically protected. Incidents such as personnel intrusion and rockfall intrusion occur frequently, seriously threatening the safety of high-speed railways. An example of perimeter intrusion is shown in Figure 1.
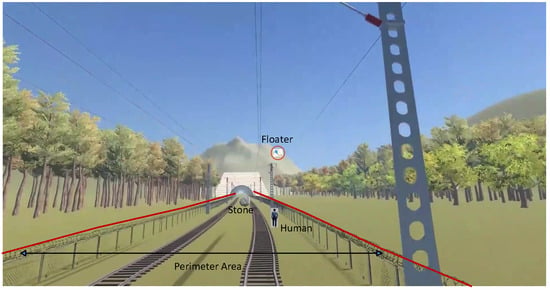
Figure 1.
Perimeter intrusion.
Most high-speed railway perimeters adopt closed models; however, it is difficult to fully cover all the risk points, and loopholes and blind spots can still exist within the perimeter. The large-scale delay of trains caused by perimeter intrusion seriously affects transportation efficiency and may even cause casualties and economic losses. Therefore, fast and accurate detection of high-speed railway perimeter intrusion is urgent and can save time for the disposal of trains. At present, all countries have taken protective measures for high-speed railway perimeter security. However, there are still false alarms and missed alarms due to the poor noise resistance. Consequently, it is necessary to summarize the prevention technologies for high-speed railway perimeters and analyze the advantages and disadvantages of each technical means. This will provide directions for future research.
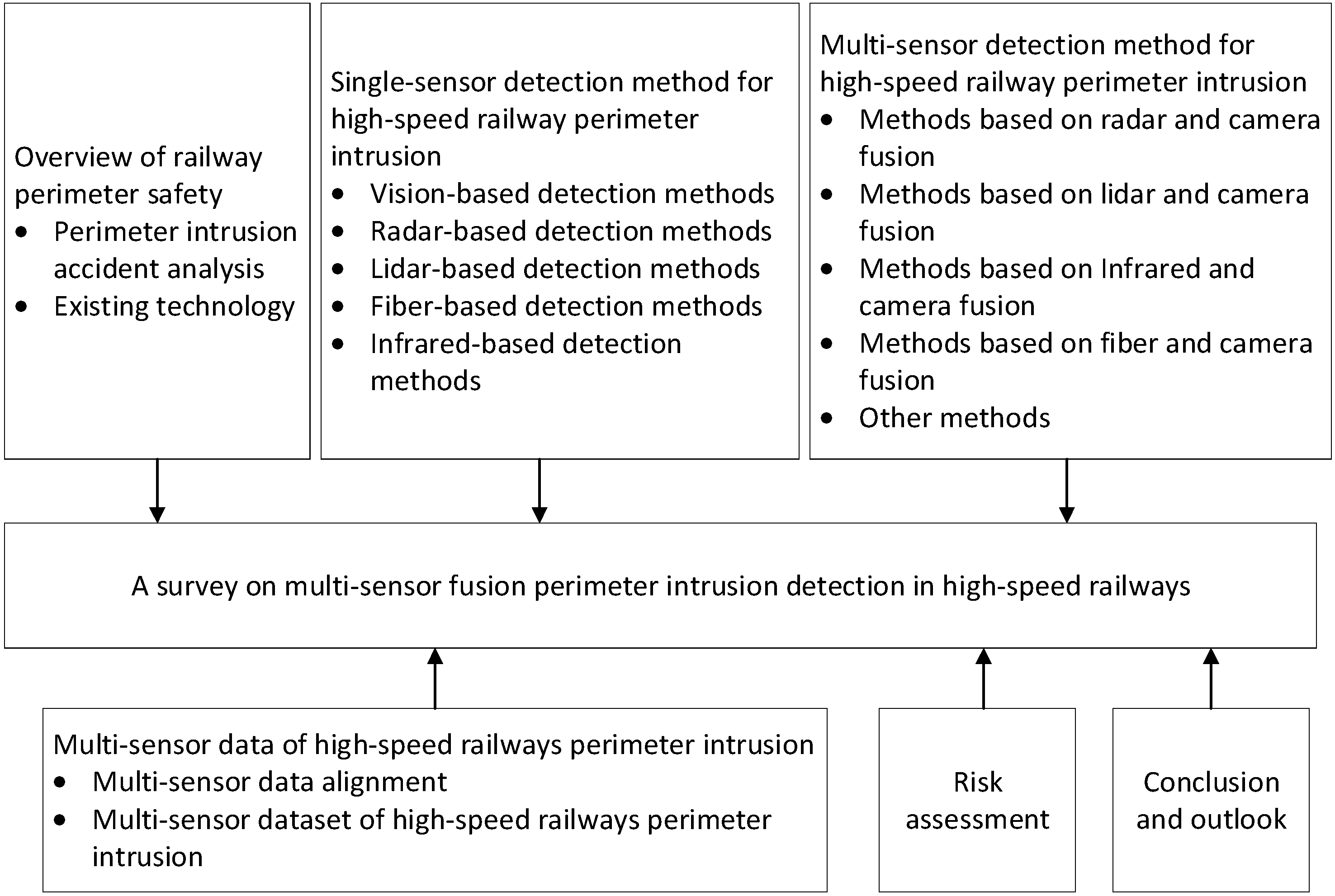
In this paper, we first summarize the high-speed rail perimeter intrusion events. We analyze the risk points prone to perimeter intrusion and the current protection measures. Secondly, we discuss the types of sensors used for perimeter intrusion monitoring currently and the adaptability of single-sensor target recognition algorithms, including camera, lidar, radar, infrared, and fiber. Next, we study the perimeter intrusion multi-sensor detection and identification method, multi-sensor data alignment method, and multi-sensor dataset for the railway field by combining the advantages and disadvantages of each monitoring sensor. Then, we discuss risk assessment of railway safety. Finally, a summary is presented. Future research on multi-sensor perimeter intrusion detection and identification technology is proposed. The structure of this article is shown in Figure 2.
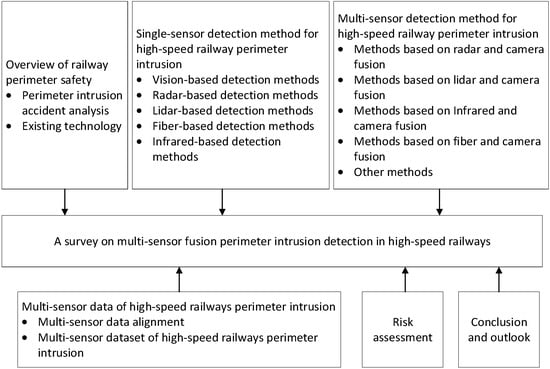
Figure 2.
Paper structure.
2. Overview of High-Speed Rail Perimeter Intrusion Security Issues
2.1. Perimeter Intrusion Event Analysis
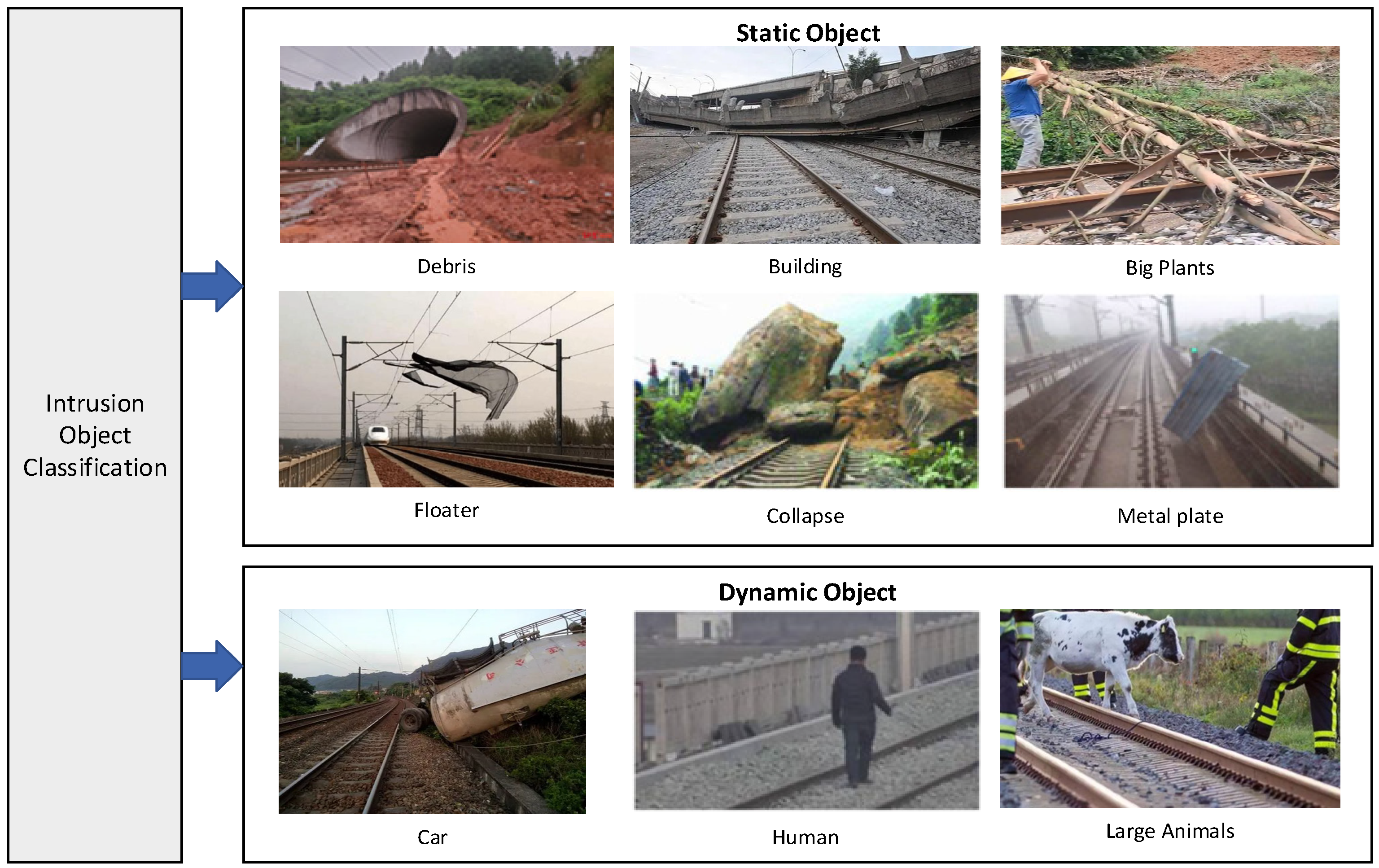
According to statistics [8], more than 83% of serious accidents on European railways are caused by perimeter intrusion. Nearly 1000 people die in such accidents on EU railways every year, with a total annual accident cost of around EUR 3.2 billion. In 2022, 954 total railway fatalities and 5882 injuries were reported by the National Safety Council [9], with 29 percent of those fatalities occurring at railway crossings. India’s railway lines are more than 68,000 km long, with more than 12,000 passenger trains and over 7000 freight trains daily. According to the annual report of Indian Railways [10], a total of 16,431 deaths and 1852 injuries were recorded in railway accidents in 2021, of which 67.7 percent were from falls from trains or collisions with people on the tracks. Statistics on traffic accidents on China’s high-speed railways show that perimeter intrusion accounts for about 79 percent of the incidents. Statistics show that about 55 percent of the incursions occur at the subgrade, followed by bridgeheads and tunnel entrances at about 35 percent. By summarizing and analyzing the domestic and international railway accident data, the intrusion targets [8,9,10] that endanger train operation are classified and counted, as shown in Figure 3.
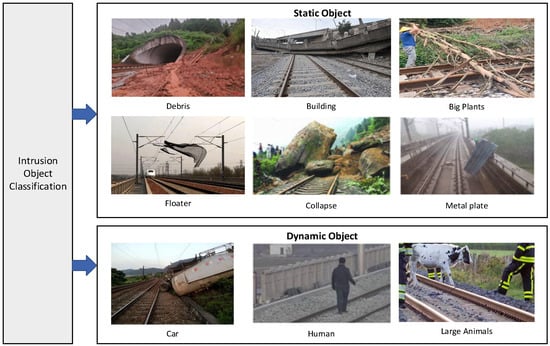
Figure 3.
Intrusion object classification.
In addition, vulnerable points of intrusion targets can be classified according to the subgrade, tunnels, and bridges. Among them, the subgrade is a frequent area of invasion due to its flat, open terrain and close proximity to human habitation or areas of dense vegetation. The main categories of incursions are large animals, vegetation, damaged buildings, humans, or vehicles. There are large areas of earthy hills and vegetation in the tunnel area, which are susceptible to vegetation intrusion, rockfall encroachment, landslide/collapse, and debris-flow caused by landslides. The main types of bridge intrusions are personnel intrusions, light floater intrusions, etc.
2.2. Existing Security Method
In Europe, the SMART (Smart Automation of Rail Transport) railway monitoring system was developed using on-board multi-sensor technology [11]. This system combines thermal imagers with laser scanners to create a fusion system that enables mid-range (up to 200 m) and remote (up to 1000 m) obstacle detection during the day and night. To avoid train accidents due to collision or obstacle intrusion, a [12] system consisting of two infrared sensors and an ultrasonic sensor was proposed for stopping a train in the case of an obstacle in front of it in India. The Japan Railway Corporation (JR-East) [13] designed obstacle intrusion detection systems at level crossings to prevent collisions between moving trains and passing vehicles. The system uses lidar for detection. It has been installed at more than 800 level crossings on JR East and has been field-tested for about two years at a level crossing on the main line. The results show that the system is very effective in preventing falling objects. At present, China has formed a security monitoring system that integrates civil defense, physical defense, and technical defense. Advanced sensing methods have been implemented in key areas, such as power grids, cameras, lidar, millimeter-wave radar, vibration fiber optics, etc. Power grid monitoring has been deployed at road bridges over railways. However, monitoring technologies for locations such as tunnel entrances have not been systematically installed yet. Countries have designed various monitoring methods and techniques for specific risk points on railway lines. However, high-speed railways require high system security, with the characteristics of zero false alarms and low false alarms. The types of railway intrusion targets are diverse, and the climate environment is variable. How to reliably perceive and accurately identify intrusion targets under adverse weather conditions is currently a technological challenge. It is also a bottleneck that restricts the practicality of high-speed rail perimeter intrusion detection systems.
3. Single-Mode Identification Method for High-Speed Rail Perimeter Intrusion
3.1. Vision-Based Detection Method
At present, a large number of cameras are deployed around China’s railways, which can effectively reduce civil defense costs. With the development of neural networks, researchers have conducted research on perimeter intrusion detection methods based on deep learning. The University of Bremen [14] proposed a CNN-based railway obstacle intrusion detection method, which achieves improved target detection at long range. The University of Nis [15] proposed an improved edge detection method for low-quality images in railway obstacle detection. Chen [16] proposed a GA-based semi-supervised anomaly detection approach that enables the detection of foreign objects on railways without prior knowledge. Rampriya et al. [17] used methods such as faster RCNN for detection under different lighting conditions on railways and were able to achieve more than 96% accuracy. Prakash et al. [18] used the Yolov3 algorithm for forest railway track monitoring to detect large animals intruding on the track. The research reduced the accidents caused by large animal intrusion. Jiao et al. [19] used the mask R-CNN method for track identification and hazardous area segmentation to achieve fast detection of railway surface obstacles. The above methods are mainly based on algorithms developed by deep learning [20,21,22,23,24]. This type of algorithm treats the intrusion target detection problem as a regression problem. The image is represented through a neural network, and the bounding boxes and categories are predicted by dividing the image into grids. Finally, the bounding boxes, target confidence, and categories of all grids are detected to achieve end-to-end training. However, deep learning methods require a large number of training samples to effectively recognize the trained targets. However, the shapes, sizes, dimensions, and colors of foreign objects on site are diverse and cannot be exhaustively listed. Therefore, algorithms find it challenging to achieve zero false negatives.
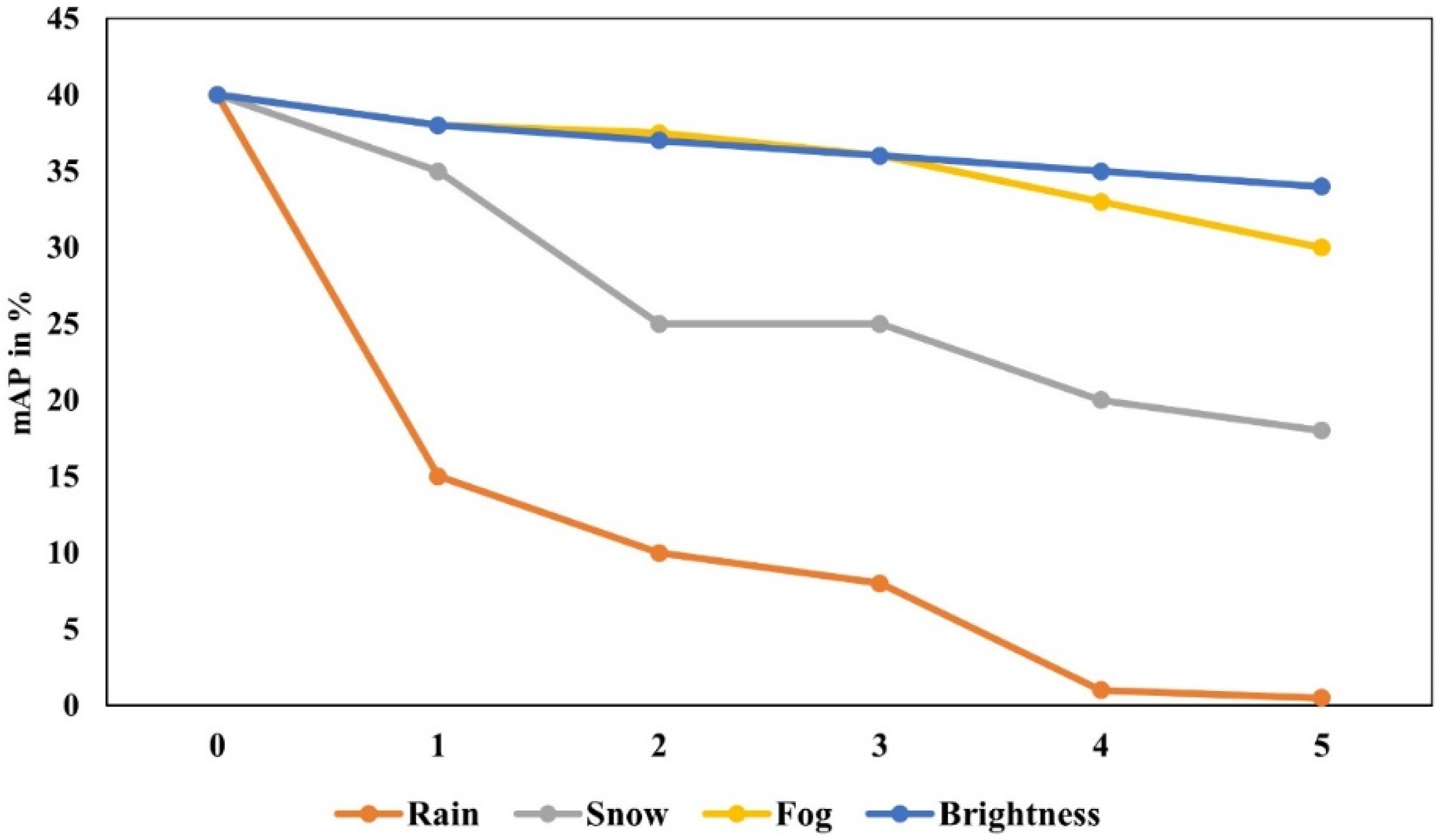
Furthermore, the meteorological conditions along the railway lines are changeable, and the terrain and environmental conditions are complex. This requires perimeter intrusion detection algorithms to have strong anti-interference capabilities, such as dealing with shaking, long distances, nighttime, and recognition interference caused by harsh weather conditions. In addressing the target recognition problem under interference conditions, Qin et al. [25] proposed a robust feature-aware network (RFA-Net) for detecting intrusion targets under complex varying conditions. They utilized integrated full-gradient distillation (IFGD) to enhance feature extraction capabilities, achieving a detection accuracy of 92.7%. Guo et al. [26] proposed a fast de-shaking method for one-dimensional grayscale projection images and a background updating algorithm, which can effectively detect intrusion targets in railway shaking scenes. Kapoor et al. [27] enhanced recognition performance under different lighting conditions by combining two-dimensional singular spectral decomposition with deep neural networks. Chen et al. [28] introduced a real-time perception and anomaly detection mechanism using deep semantic segmentation to extract real-time track areas and detect obstacles of different shapes and types based on a continuous trajectory. This method can detect small obstacles on straight tracks, curves, and turnouts and is suitable for constantly changing weather conditions. Appiah et al. [29] proposed an improved method based on YOLOV7 to enhance detection performance under adverse weather conditions such as rain and fog. Although research on adverse weather has led to performance improvements in detection, the accuracy remains below 80%. A study [30] revealed that under rain, snow, and fog interference, the camera’s detection accuracy decreased by at least 31.1%, with a maximum decrease of 60.4%. The more severe the weather interference, the more pronounced the camera’s detection effectiveness deterioration. The detection accuracies of cameras under weather interference are shown in Figure 4.
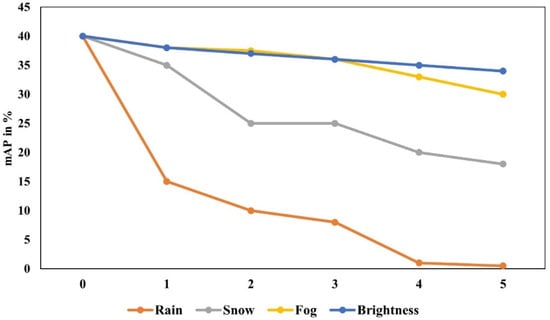
Figure 4.
Detection accuracy of cameras under weather interference [30].
Additionally, with the emergence of large model technology, research on perimeter intrusion recognition is gradually advancing using visual-based large model technology [31]. Compared to traditional neural networks, these methods utilize a global self-attention mechanism to model semantic information in images, independent of local receptive fields. However, the timeliness of their application still requires further verification.
Although video-based intelligent monitoring technology has been widely adopted, it has to some extent reduced the monitoring burden on maintenance personnel. However, it still has shortcomings. Firstly, cameras have poor recognition accuracy in situations such as nighttime, light and shadow interference, rain, and fog. Secondly, current deep-learning methods require a large number of training samples. However, perimeter intrusion is a low-probability event, making it difficult for us to obtain a significant amount of real intrusion data.
3.2. Radar-Based Detection Method
Millimeter-wave radar receives electromagnetic wave signals reflected by target objects to calculate the distance, speed, and angle of the target. It has advantages such as being less affected by lighting conditions and harsh weather. Cai et al. [32] proposed a railway-level crossing obstacle detection system based on millimeter-wave radar, using signal processing algorithms to extract target signals and suppress clutter in received signals. Jing [33] addressed the issue of obstacles intruding on railway perimeters by proposing a millimeter-wave radar-based obstacle intrusion detection method, achieving identification and tracking of moving targets within the radar detection range. Yair et al. [34] utilized millimeter-wave radar with neural network architecture for reliable classification of pedestrians and animals, achieving 100% detection at close range. British scholars [35] installed radar on one side of the railway to achieve obstacle detection within a 30 m range with 0.5 m resolution, but its detection range is limited, suitable only for road intersection sections. The main reason for the short detection range of the radar is the sparse point cloud.
To address the issues of excessive noise or sparse point clouds in traditional radar recognition algorithms, many scholars have conducted related research. Pan et al. [36] proposed a motion segmentation and clustering method based on 4D millimeter-wave radar, with the addition of a motion estimation module, showcasing outstanding tracking accuracy for moving objects. To enhance the perception capability of autonomous driving, Yan et al. [37] introduced a multi-view feature network for completing 3D object detection using 4D millimeter-wave radar and incorporated a position map generation module to address the issue of insufficient feature utilization. Shi et al. [38] proposed a multi-view feature fusion network framework based on 4D millimeter-wave radar. This method can model the entire 3D scene and overcome the limitation of feature representation capacity in a sparse point cloud. While there has been extensive research on 4D millimeter-wave radar in public transportation, further exploration is needed to enhance the detection performance of 4D millimeter-wave radar in complex railway environments.
3.3. Lidar-Based Detection Method
Lidar has the characteristics of high detection accuracy and being unaffected by lighting conditions, making it suitable for monitoring intruding targets such as falling rocks, vegetation, and mudslides. Amaral [39] focused on obstacle detection at railway-level crossings, using the background differencing method for target identification based on lidar’s three-dimensional point cloud. Yu et al. [40] proposed a real-time track recognition method based on three-dimensional point clouds, employing a multi-scale neural network to generate predictive results for each voxel and track position. In addressing the issue of boundary monitoring for foreign object intrusion, Qu [41] first preprocesses the railway scene point cloud collected by lidar, then uses the RANSAC algorithm to partition and fit the track plane, divides the detection area based on the track position, and finally employs an improved Euclidean clustering method for obstacle classification. Wisultschew [42] used 3D lidar for real-time target detection and tracking in railway-level crossing scenes. Shinoda et al. [43] focused on scenarios within tunnels, using lidar for target detection of personnel and vehicles. However, the above-mentioned literature primarily employed background differencing and clustering methods. With the increasing application of deep learning methods in the field of point cloud object detection, numerous deep learning-based approaches are gradually being developed and researched, such as PointNet [44], VoxelNet [45], PointPillars [46], and PointRCNN [47], among others. Deep learning methods offer powerful learning capabilities and high recognition accuracy. However, they require a large amount of sample data for network training and optimization. This leads to algorithms being time-consuming. Despite the extensive research on lidar recognition methods, there are still challenges, such as susceptibility to rain, fog, and other disturbances, when applied on a large scale in the railway sector.
3.4. Fiber-Based Detection Method
Fiber optic sensing technology utilizes changes in the characteristic parameters of light propagating through the fiber caused by external vibrations for measurement and data transmission, possessing features such as high sensitivity and strong interference resistance. Sinha et al. [48] employed fiber optic sensors to detect rocks and wood of different weights falling at different distances on railheads, ballasts, and sleepers, enabling the detection of rocks and wood falling on railway tracks within a distance of 500 m. Catalano et al. [49] used fiber optic grating sensors to monitor perimeter scenes for unauthorized personnel intrusion. Nan et al. [50] proposed a distributed vibration fiber optic monitoring method, utilizing ultra-weak fiber Bragg grating sensor technology to collect the distributed vibration responses of moving trains and intruders, effectively tracking trains and monitoring personnel intrusion. Qu et al. [51] proposed a fiber optic sensing technology based on phase-sensitive detection to capture the raw vibration signal of railway tracks over a period of time. This method involves filtering, short-time Fourier transform, and autoregressive model spectrum estimation. After analyzing the frequency signal characteristics, it can determine whether a perimeter intrusion event has occurred on the track. Catalano [52], based on integrated vibration fiber optics, developed a method for detecting railway perimeter personnel intrusion events using fiber Bragg gratings. Fang [53] employed an asymmetric dual Mach–Zehnder interferometric fiber optic sensing technology utilizing the RBF neural network and an improved wavelet packet denoising method for high-speed railway perimeter intrusion detection. Vibration fiber optics exhibit high sensitivity suitable for long-distance detection but have poor robustness, making them prone to false alarms.
3.5. Infrared-Based Detection Method
To address the issue of poor camera recognition in dark conditions, a method for identifying railway obstacles based on monocular thermal imaging was proposed by Swedish scholars [54]. Indonesian railways [55] also use infrared thermal imaging to detect obstacles in front of trains and signal locomotive drivers to make decisions to reduce speed or stop the train through indicator lights. Kapoor [56] introduced a new method using thermal imaging to identify objects (obstacles) on railway tracks in front of moving trains, with results showing an accuracy rate of approximately 83%. Wang [57] presented a multi-feature fusion and attention-enhanced anchor-free foreign object detection algorithm, as well as a feature-enhanced railway foreign object tracking detection algorithm. Li et al. [58] proposed a method for railway foreign object detection, first synthesizing infrared railway images using generative adversarial networks and then predicting synthetic infrared foreign object targets using a single-shot multi-box model. However, this method suffers from poor real-time performance due to multiple stages of generation and detection. Yang et al. [59] put forward a cascaded enhanced single-point multi-box detection SSD algorithm, enhancing the extraction of infrared target information through a cascade R-CNN feature network and combining it with a tracking network for mobile target tracking detection. Infrared thermal imaging cameras have good detection performance at night. They can identify targets hidden behind vegetation, with a wide visual range, and are less susceptible to environmental interference. However, the drawback of infrared technology is its inability to recognize objects with small temperature differences in the environment and its incapacity to identify detailed features of invading targets.
3.6. Summarize
Summarizing the advantages and disadvantages of the above sensor detection methods, the results are shown in Table 1.

Table 1.
Pros/cons of various sensor detection methods.
4. Multi-Sensor Identification Method for High-Speed Rail Perimeter Intrusion
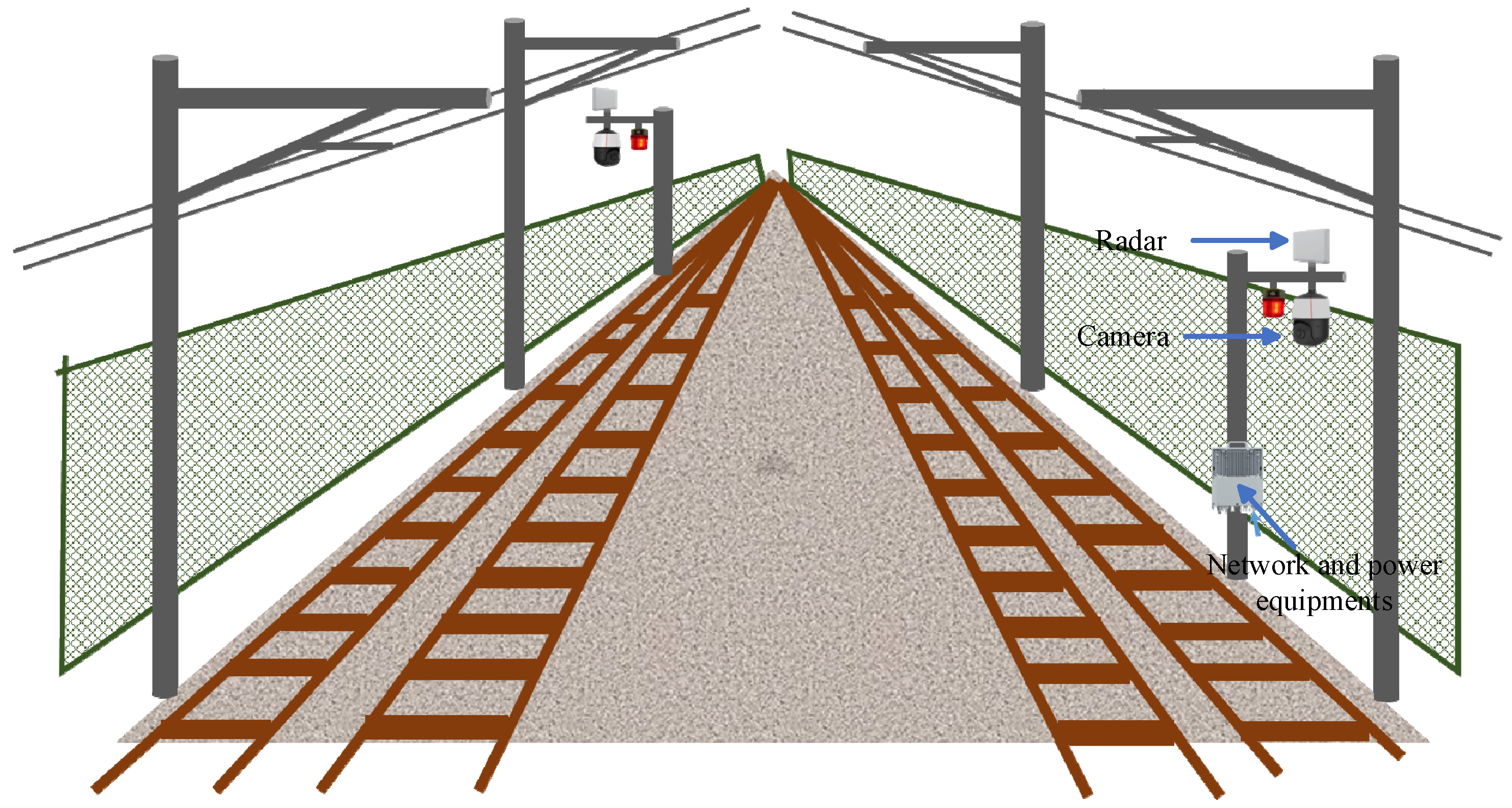
Due to the current limitations of single sensors in monitoring, it is necessary to combine the technological advantages of multiple sensors and conduct research on multi-sensor fusion detection technology. Currently, multi-sensor fusion monitoring devices include two deployment methods: onboard installation and ground installation. Considering that the braking distance of high-speed trains exceeds 2 km, it is not possible for existing onboard monitoring devices to effectively detect targets beyond this range. Therefore, we believe that ground installation is the optimal solution to address this issue. Using radar as an example, the ground installation method is shown in Figure 5.
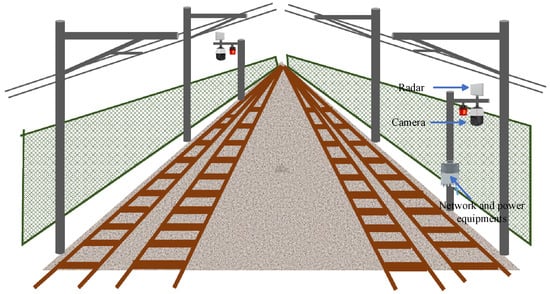
Figure 5.
The ground installation method.
In addition, multi-sensor fusion algorithms can be divided into three levels based on different data processing methods: data-level fusion, feature-level fusion, and decision-level fusion. Data-level fusion involves aggregating and fusing various data collected by different sensors, then analyzing and identifying the fused data. The advantage of this method is to ensure the richest and most accurate information from the original data as possible. However, the drawbacks are that the scale of the original data is too large, the data formats from different sensors are not completely consistent, the fusion processing is complex, and real-time performance is relatively low. Feature-level fusion involves extracting features from the data collected by different sensors, merging the extracted feature information, and analyzing and identifying the fused features. This method reduces the bandwidth requirements for data transmission and improves some aspects of real-time performance.
Decision-level fusion involves merging the results output by different sensors separately. This fusion method, according to application requirements, achieves analysis and judgment by establishing fusion rules. The advantage of this approach is its strong real-time performance, good noise resistance, and fault tolerance. However, it suffers from significant data information loss, and its accuracy heavily relies on the results of the preceding processing stages. Combining the characteristics of multiple sensors such as cameras, millimeter-wave radar, laser radar, vibration fiber optics, and infrared thermal imaging has become a hot research topic for achieving precise identification of multi-modal fusion data. Combining the characteristics of multiple sensors such as cameras, radar, lidar, fiber, and infrared, achieving precise detection of multi-sensor fusion data has become a hot research topic.
4.1. Methods Based on Radar and Camera Fusion
Atsutake et al. [60] proposed a millimeter-wave YOLO architecture, achieving high-precision object classification and position recognition by applying different detectors to each set of distance data. Liu et al. [61] introduced a traceless Kalman filtering method for the fusion of millimeter-wave radar and cameras, used to track detected targets in the image plane and monitor new target objects in the scene. Wang et al. [62] presented a robust target detection and classification algorithm based on the fusion of millimeter-wave (MMW) radar and cameras, with an accuracy 89.42% higher than traditional radar signal algorithms and 32.76% higher than faster R-CNN, especially in low-light and strong electromagnetic interference environments. Lamane et al. [63] utilized FMCW radar and visual fusion identification for target detection and classification, achieving higher accuracy compared to existing methods. Song et al. [64] proposed a multi-source deep learning target detection network based on the fusion of millimeter-wave radar and vision for detection, effectively reducing missed detection rates under insufficient lighting conditions. With the maturity of 4D millimeter-wave radar technology, Guan et al. [65] introduced a fusion model of vision and 4D millimeter-wave radar, employing a panoramic perception training strategy based on uncertainty to achieve better performance in harsh weather and poor lighting conditions. Shuai et al. [66] studied feature-level fusion methods for millimeter-wave radar and cameras, significantly enhancing detection capabilities in low-light scenes. The team from the China Academy of Railway Sciences [67] has proposed a radar–video fusion detection method for identifying and tracking perimeter intrusions by personnel on high-speed rails, enabling round-the-clock monitoring. Ding et al. [68] focused on target detection in snowy conditions and introduced a feature fusion module to construct a lightweight object detection network, addressing challenges such as blurriness, distortion, and snow coverage. Albert et al. [69] proposed a method for integrating camera and radar data. This approach involves establishing a recurrent neural network to process the time series of object positions and speeds. Centerfusion [70] is a feature fusion method for three-dimensional object detection using radar and camera data. Initially, a center point detection network is used to detect objects by recognizing the center points on the image. Then, a novel method based on a frustum is employed to address key data association issues, associating radar detections with the corresponding object center points. Compared to state-of-the-art vision-based algorithms, the detection accuracy has been improved by over 12%.
Research has shown that the fusion of cameras and millimeter-wave radars has a significant impact on mobile target detection. However, there is still a need to improve the recognition of static foreign objects and enhance the ability to fuse 4D radar information, which can further improve the performance of detection methods.
4.2. Methods Based on Lidar and Camera Fusion
Previous research has designed various methods for the fusion of cameras and lidar in perimeter intrusion detection. Han proposed a fusion method for lidar and cameras [71], which projects lidar point clouds onto images through cross-calibration to obtain sparse depth images, followed by classification and recognition. Another method involves using image detection algorithms to generate a series of bounding boxes, based on which a series of 3D frustums are created and projected into a 3D point cloud space for recognition [72]. Wang et al. [73] proposed a multi-sensor framework that integrates camera and lidar data, using a segmentation + decision-level fusion method for monitoring obstacles on railway tracks. Yu et al. [74] introduced a railway foreign object detection system based on the combination of lidar and video, constructing three-dimensional point cloud data and performing denoising, track segmentation, and target clustering, effectively reconstructing the track’s topological structure. Miickel [75] presented a fusion detection method for cameras and lidars, achieving railway obstacle detection with a range of up to 400 m under typical working conditions. Shen et al. [76] proposed a multi-source object detection network that integrates target tracking based on camera and lidar fusion (YCANet). This method utilizes an improved YOLOv7 and CenterPoint for image and point cloud detection, respectively, and employs aggregated Euclidean distance (AED) as a new metric in the data association module for tracking results of both images and point clouds. Xiao et al. [77] used multi-sensor technology based on computer vision and lidar for real-time collection of video images and ranging data in the track area, followed by preprocessing of collected videos and delineation of regions of interest. Subsequently, obstacle detection was performed in the regions of interest to obtain the geometric features and location information of obstacles. Finally, based on the severity of the obstacles, the impact on train operation was determined, and the detection results were transmitted to the corresponding trains. Wen et al. [78] designed a strategy for obstacle detection in complex weather conditions by integrating cameras and lidar and proposed a multimodal contrastive learning method. In extreme and harsh weather conditions such as rain, snow, and fog, Mai et al. [79] proposed a lidar and camera stereo fusion network to address the issue of data distortion, significantly improving 3D detection performance in foggy weather conditions. Our team [80] conducted research on tunnel entrance scenes and studied a fusion monitoring scheme using lidar and cameras capable of detecting foreign objects of 20 cm3 within a range of 60 m under heavy rain and similar weather conditions. Although both domestic and international research institutions have conducted studies on the fusion of lidar and video technologies [81], the application of lidar and video fusion methods in railways still faces the following challenges: (1) The detection distance of lidar and camera fusion is limited, leading to unclear point clouds and images at long distances; (2) Lidar and cameras are unable to function properly under adverse weather conditions (such as heavy rain and thick fog); (3) The cost-effectiveness of lidar and camera fusion technology is also a significant issue that cannot be overlooked.
4.3. Methods Based on Infrared and Camera Fusion
Visible light images are suitable for the human visual perception system, with high resolution and rich detail features. Infrared images depict the thermal radiation of objects, which can resist interference from harsh environments, but they typically have low image resolution. The fusion of images from these two modalities can provide images with high contrast and rich texture details while resisting interference from harsh environments, which is beneficial for subsequent target detection. Gasparini et al. [82] proposed a method for detecting intrusions in front of trains at night based on the fusion of visible and infrared thermal images, using deep learning techniques for automatic detection. Zhou [83] presented a railway foreign object intrusion detection method based on multi-source image fusion, improving registration algorithms based on SURF feature points. The decision-level fusion of infrared and visible light images compensates for the deficiencies in detection under shadows and nighttime conditions in visible light images. Xu [84] improved the ViBe detection algorithm and proposed a method for enhancing target fusion in railway foreign object intrusion detection, addressing the issue of single visible light image recognition failure in nighttime and adverse weather conditions. Italian scholars [85] installed infrared thermal imaging and cameras in front of trains to fuse visible light images and thermal images for detecting obstacles ahead on the railway. They introduced a deep learning framework with two sequential modules, an autoencoder network and a classification recognition network, and collected camera and thermal imaging data in railway scenarios. In other fields, Kim et al. [86] presented a method for detecting and tracking sea-level targets using target detection and robust statistics based on image and infrared sensors, which are robust against sensor vibration and occlusion. Xie et al. [87] proposed a local feature descriptor for the registration of visible light and infrared images, encoding anisotropic features of multiscale edges and texture information to achieve better detection results. Currently, there is limited research on the fusion recognition of infrared thermal imaging and visible light images in the railway field. The main reason is that it is difficult to distinguish between the temperature of the intrusion target and the environmental temperature when the temperature difference is small. Therefore, we still need to improve the detection accuracy in scenarios with low-temperature differences.
4.4. Methods Based on Fiber and Camera Fusion
The fusion monitoring area of vibrating optical fiber and video is mainly in the boundary area of railway lines. Zhou [88] proposed a railway perimeter monitoring system based on vibrating optical fiber and video analysis technology. When the vibrating optical fiber detects an intrusion, the video will be called to retrieve the video information at the intrusion location and analyze it. This system can meet the long-distance and large-scale monitoring requirements of railways. Bai et al. [89] proposed a perimeter protection system combining vibrating optical fiber and video analysis technology suitable for high-speed railway lines. This system uses vibrating optical fiber to achieve precise positioning of intrusion events and reviews intrusion events through video analysis technology. Li et al. [90] proposed a high-speed rail perimeter intrusion perception and identification system that integrates distributed optical fiber sensing technology, video linkage technology, and intelligent recognition technology. This system uses distributed vibrating optical fiber to identify intrusion locations and collects on-site data for model training, reducing data processing dimensions and false alarm rates. The China National Railway Group [91] integrated pre-processed vibrating optical fiber data with video data for decision fusion, enhancing monitoring accuracy under severe weather conditions. Ma [92] designed a distributed optical fiber intrusion behavior monitoring system based on faster R-CNN. This system uses the network for feature processing of optical fiber data and analyzes videos using a human skeleton extraction model based on ST-GCN. By correlating the two types of data, the system can accurately monitor four different intrusion behaviors. However, the monitoring method based on the fusion of fibers and cameras is primarily contact-based monitoring. Fibers cannot provide three-dimensional protection, leading to monitoring blind spots and gaps, making them only suitable for boundary areas within the perimeter range.
4.5. Other Methods
With the rapid development of sensor technology, an increasing number of integrated monitoring methods are being applied in the railway field. Zhao [93] used the fusion of radar and lidar to preliminarily achieve obstacle detection within the track limits. Garcia et al. [94] proposed a fusion system using infrared and ultrasonic sensors to detect targets on railway tracks and employed principal component analysis for data extraction. The Railway Technical Research Institute of Japan [95] proposed a method of detecting obstacles on railways using the fusion of millimeter-wave radar and vibrating optical fibers. The proposed method can detect people and non-metallic objects entering the track area up to approximately 200 m from the installation point. Indian Railways [96] has proposed an integrated system for detecting obstacles on tracks under fog, smoke, and heavy rain conditions. This system utilizes cameras, millimeter-wave radar, laser radar, and infrared thermal imaging. The cameras capture long-distance images of the track, displaying them in real-time on a mini screen fixed in the locomotive cabin. Short-range, mid-range, and long-range combined millimeter-wave radar sensor systems are used for continuous detection of obstacles in the locomotive driver’s blind spots on the track. Long-range laser and infrared illuminators are employed for monitoring in zero visibility conditions. In addition, Chen et al. have researched a general fusion framework for autonomous driving using radar, lidar, and cameras [97], achieving the best object detection performance on a publicly available multi-source data fusion dataset. Ricardo et al. have developed a perception architecture based on an evidence framework that fuses radar, lidar, and cameras to address the detection and tracking of pedestrians, cyclists, cars, and trucks [98]. Mario has proposed a method for multimodal recognition under adverse weather conditions, combining lidar, radar, cameras, and infrared thermal imaging, introducing a deep fusion network for robust fusion that incorporates an entropy-based approach and adaptive fusion features [99]. Although various fusion methods have been proposed, the applicable boundaries of the above methods are still unclear.
5. High-Speed Rail Perimeter Intrusion Multi-Sensor Data
5.1. Multi-Sensor Data Alignment Method
In order to realize the effective fusion of multi-sensor data, data alignment between various sensors is a prerequisite, including for internal and external parameter calibration. The internal parameter calibration is an inherent property of the camera that realizes the projection of the target in the camera coordinate system to the imaging plane, including the camera matrix and the distortion coefficient. These parameters are determined by calculating the relationship between feature points with known coordinates on the calibration object and their corresponding pixel points on the image. A popular method for calibrating the internal reference is the Zhang Zhengyou calibration method. The external parameter is the mapping matrix between two sensor data points. By calculating the mapping matrix, we can transform the multi-sensor data in the system to be used together under the same reference coordinate system. This is a key step in multi-sensor data fusion.
In the alignment method for point cloud and image data, extrinsic parameter calibration realizes the projection of the target in the lidar/radar coordinate system to the camera coordinate system. The extrinsic parameters of radars and cameras consist of rotation and translation matrices. At present, the external parameter calibration method can be divided into two categories [100,101]: direct inverse solution and the learning-based method.
The direct inverse solution method utilizes the feature points of the calibration plate for calibration. The learning-based method achieves calibration by directly extracting and automatically matching structural features in the environment. In terms of data alignment methods for radar and images, Wang et al. [102] proposed a high-precision calibration method based on the region of interest (ROI) and artificial potential field. Among the alignment methods for images and infrared, image feature-based alignment [103] and deep learning-based alignment methods [104,105] were proposed. Learning-based methods can avoid image shifts and distortions caused by external reasons such as jitter in the imaging platform. This can improve the robustness of detection.
5.2. Railway Scene Multi-Sensor Dataset
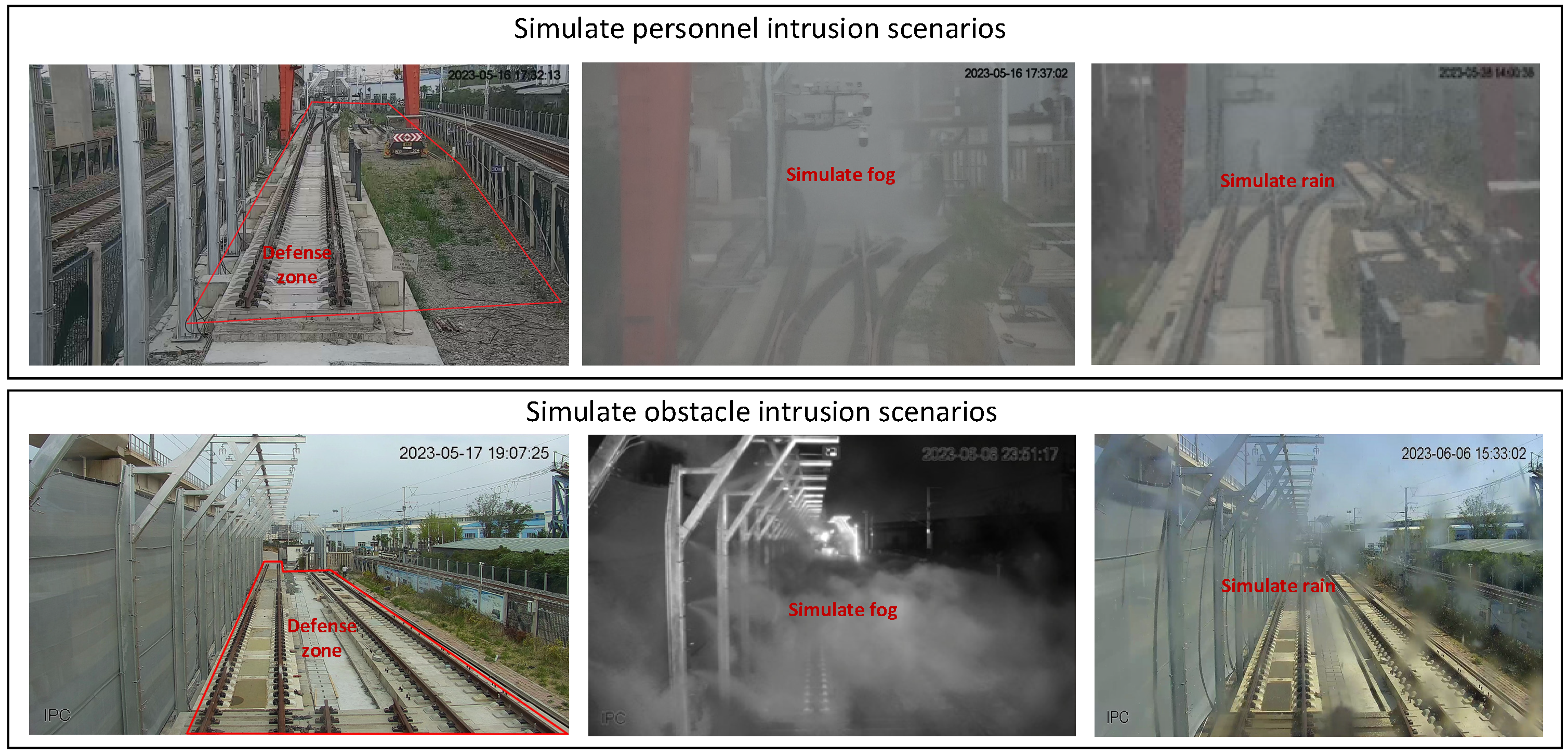
Multi-sensor fusion relies heavily on pre-training data. A large amount of manually labeled scene intrusion data can drive the algorithm to achieve good performance. Because railroad perimeter intrusion is a low-probability event and it is more likely to happen during severe weather conditions like strong winds, heavy rain, snowfall, and thick fog, it was difficult for us to collect intrusion multi-sensor datasets in railway scenarios. To solve this problem, Gianluca [106] proposed TrainSim, which recreates realistic railway scenes in a virtual scenario. This study automatically generated training datasets from simulated lidar and cameras. Wu [107] proposed an automatic multi-sensor joint calibration method and constructed a point cloud dataset for a railway scene. To realize the automatic driving of a train, RailSem19 [108] collected video clips of railway scenes from 38 countries/regions with different weather, lighting, and seasons in the train perspectives. This dataset consists of 8500 annotated short sequences from the ego-perspective of trains, including over 1000 examples with railway crossings and 1200 tram scenes. This dataset displayed images of trains, turnouts, platforms, buffer stations, railway signs, and railway signals. Deutsche Bahn produced a multi-sensor dataset, OSDaR23 [109], which includes lidar, millimeter-wave radar, visible light camera, and red and infrared camera data and labels 200,000 various object categories related to the railway environment. For the case of installing the sensors on the ground, we [67] proposed an acquisition scheme of mounting the sensors on poles. A realistic railway intrusion scenario was built, and multi-sensor fusion data was collected using real intrusions. The scenario is shown in Figure 6.
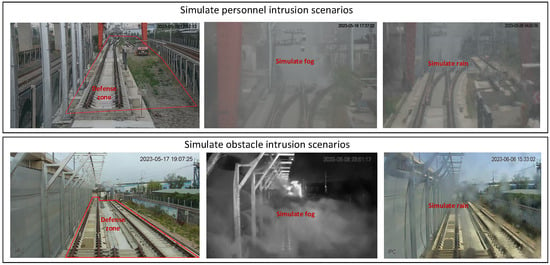
Figure 6.
Simulation of intrusion scenarios [67].
Since the environment of railways is complex and changeable, sensor combinations and recognition methods are diverse, which requires a wide range of data sets for training and evaluation. Therefore, multi-sensor fusion data sets of high-speed railway perimeter intrusion scenes still face multi-scene, multi-day, multi-behavior, and multi-species characteristics.
6. Risk Assessment of Railway Safety
To apply the results of perimeter intrusion detection to the high-speed railway system, it is necessary to conduct research on perimeter intrusion risk assessment methods. Risk assessment can provide accurate data references for railway inspectors, as well as objective decision-making support for management departments. For the safety of passengers at railway stations, the Laboratory for Track Engineering and Operations for Future Uncertainties [110,111,112] uses the decision tree (DT) method for safety classification and analysis. Additionally, adaptive neuro-fuzzy inference is used to assess the congestion level of train stations. A risk decision-making framework based on probabilistic risk assessment (PRA) has also been proposed. Aiming at the risk of shunting on dedicated lines, Zhang et al. [113] proposed a risk assessment method based on fuzzy reasoning. The Czech Republic [114] adopts a fuzzy mixed method to assess the risks of railway infrastructure. Liu et al. [115] proposed an ensemble learning algorithm for railway signal safety and constructed a comprehensive risk assessment method. In response to safety issues along railway lines, the China National Railway Group [116,117,118] has classified risks into four levels and developed railway safety risk control measures and evaluation methods. However, the above methods are mainly based on manual evaluation data, and data-driven evaluation methods require further research. In addition, information including target types and intrusion locations based on perimeter intrusion has not been effectively applied in evaluation methods and disposal measures.
7. Conclusions
To our knowledge, this article provides a comprehensive overview of perimeter intrusion detection in high-speed railways for the first time, including single-sensor detection and multi-sensor fusion detection. Compared to single-sensor detection, the use of multiple sensors can enhance the accuracy of perimeter intrusion detection. Through simulated environment testing, we can gain the application boundaries of multi-sensor technology. However, under adverse conditions, multi-sensor detection methods still face performance degradation. The main reason is that when the wavelength of electromagnetic waves emitted or received by the above sensors is smaller than the diameter of the rain and fog particles, the electromagnetic waves cannot penetrate or diffract through the rain and fog particles. However, adverse weather conditions are inevitable. Only by overcoming these challenges can multi-sensor fusion technology be further applied. Compared to cameras, infrared, and lidar, it can be said that radar has greater potential. In addition, another challenge currently faced is the lack of specific datasets in the railway domain, especially intrusion data under adverse weather conditions. Therefore, for railway applications, we need datasets that cover full railway scenarios to conduct rigorous evaluations of existing methods. Moreover, how to integrate the detection results of the existing methods into the current railway system still requires further exploration.
The safety level of high-speed railways continues to improve. In this study, we focus on the recent fusion strategies for multiple sensors in the railway field. In Section 3, we discussed single-sensor recognition algorithms in detail. We found that the performance of single sensors is limited in low light or bad weather conditions. Therefore, by analyzing these drawbacks, it becomes evident that it is necessary to fuse multi-sensor data. In Section 4, we discussed multi-sensor fusion strategies from recent years’ research and analyzed the problems of recognition methods based on multi-sensor fusion. Furthermore, we provided a necessary summary of multi-sensor fusion data alignment and datasets. However, we found that there are still some shortcomings in the multi-sensor fusion method through this survey. Therefore, we propose future research perspectives.
- (1)
- Reliable perception under severe weather conditions
Currently, most of the existing research focuses on the accurate classification and identification of targets. Accurate sensing of perimeter intrusion targets by sensors has been neglected. As a result, the adaptability and stability of sensors in adverse weather conditions are reduced. For example, camera images are blurred in dense fog conditions and plagued by interfering light spots in heavy rain conditions. Lidar point clouds also become less in dense fog conditions, while radar detection distances become shorter in heavy rain conditions. The result is that the sensor cannot detect the target behind rain and fog. Therefore, the research and innovation of wide-wavelength and high-resolution sensor technology should be increased to realize all-weather sensing of intrusion targets.
- (2)
- Accurate recognition using multi-sensor fusion data
In recent years, more and more research has focused on deep learning methods and multi-sensor fusion methods to improve the reliability of the railway system. Existing recognition methods can accomplish perimeter intrusion monitoring better under sunny weather conditions. When the acquired monitoring data are unstable, incomplete, and inaccurate, the recognition performance drops dramatically. Therefore, the research on multi-sensor fusion recognition algorithms in railway scenarios should be deepened, and the effective information of multi-sensor fusion data should be deeply excavated. This can improve the performance and adaptability of the railway environmental safety monitoring system and provide strong protection for trains.
The railway system requires high accuracy in perimeter intrusion detection. To be useful in the railway application, the existing sensing technology and artificial intelligence technology still need to be improved.
Author Contributions
T.S. guided and designed the research. P.G. drafted and formatted the manuscript. Others collected the relevant materials. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the National Natural Science Foundation of China (U2268217) and the China Academy of Railway Sciences Project (DZYF23-40).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- International Union of Railways (UIC), High-Speed Rail. 2023. Available online: https://uic.org/IMG/pdf/atlas_uic_2023.pdf (accessed on 20 February 2024).
- Wang, Z.; Guo, G.; Liu, C.; Zhu, W. Research on Accident Risk Early Warning System Based on Railway Safety Management Data under Cloud Edge Collaborative Architecture. In Proceedings of the 2022 2nd International Signal Processing, Communications and Engineering Management Conference (ISPCEM), Montreal, ON, Canada, 25–27 November 2022; pp. 300–304. [Google Scholar]
- Koohmishi, M.; Kaewunruen, S.; Chang, L.; Guo, Y. Advancing railway track health monitoring: Integrating GPR, InSAR and machine learning for enhanced asset management. Autom. Constr. 2024, 162, 105378. [Google Scholar] [CrossRef]
- Alawad, H.; Kaewunruen, S. Wireless Sensor Networks: Toward Smarter Railway Stations. Infrastructures 2018, 3, 24. [Google Scholar] [CrossRef]
- Alawad, H.; Kaewunruen, S.; An, M. A Deep Learning Approach Towards Railway Safety Risk Assessment. IEEE Access 2020, 8, 102811–102832. [Google Scholar] [CrossRef]
- Qin, Y.; Cao, Z.; Sun, Y.; Kou, L.; Zhao, X.; Wu, Y.; Liu, Q.; Wang, M.; Jia, L. Research on Active Safety Methodologies for Intelligent Railway Systems. Engineering 2023, 27, 266–279. [Google Scholar] [CrossRef]
- Institute of Computing Technologies of China Academy of Railway Sciences. High-Speed Railway Perimeter Intrusion Alarm System Technology Implementation Plan; Institute of Computing Technologies of China Academy of Railway Sciences: Beijing, China, 2016. [Google Scholar]
- Rosić, S.; Stamenković, D.; Banić, M.; Simonović, M.; Ristić-Durrant, D.; Ulianov, C. Analysis of the Safety Level of Obstacle Detection in Autonomous Railway Vehicles. Acta Polytech. Hung. 2022, 19, 187–205. Available online: https://api.semanticscholar.org/CorpusID:246734413 (accessed on 23 February 2024). [CrossRef]
- Railroad Deaths and Injuries. National Safety Council. Available online: https://injuryfacts.nsc.org/home-and-community/safety-topics/railroad-deaths-and-injuries (accessed on 23 February 2024).
- Fleck, A. Indian Railways Are Improving, But Safety Issues Remain. Statista. 7 June 2023. Available online: https://www.statista.com/chart/30152/number-of-train-related-accidents-in-india/ (accessed on 1 April 2024).
- Ristić-Durrant, D.; Haseeb, M.A.; Franke, M.; Banić, M.; Simonović, M.; Stamenković, D. Artificial Intelligence for Obstacle Detection in Railways: Project SMART and Beyond. In Dependable Computing—EDCC 2020 Workshops; Bernardi, S., Vittorini, V., Flammini, F., Nardone, R., Marrone, S., Adler, R., Schneider, D., Schleiß, P., Nostro, N., Olsen, R.L., et al., Eds.; EDCC 2020; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2020; Volume 1279. [Google Scholar]
- Singh, S.; Kumar, J. Automatic Train Protection (ATP) and Signaling with Accident Avoidance System for Indian Railways. Int. J. Innov. Technol. Explor. Eng. 2020, 9, 986–990. [Google Scholar] [CrossRef]
- Yao, Y.; Kitamura, S.; Ishima, R.; Murakami, T.; Hayashi, T.; Takahashi, T.; Kowashi, Y.; Segawa, Y. Enhancement of detection functions of a 3D-laser-radar-type obstacle detection system at a level crossing. WIT Trans. Built Environ. 2020, 199, 43–52. [Google Scholar]
- Franke, M.; Gopinath, V.; Ristić-Durrant, D.; Michels, K. Object-Level Data Augmentation for Deep Learning-Based Obstacle Detection in Railways. Appl. Sci. 2022, 12, 10625. [Google Scholar] [CrossRef]
- Perić, S.; Milojković, M.; Stan, S.-D.; Banić, M.; Antić, D. Dealing with Low Quality Images in Railway Obstacle Detection System. Appl. Sci. 2022, 12, 3041. [Google Scholar] [CrossRef]
- Chen, Y.; Tong, S.; Lu, X.; Wei, Y. A Semi-Supervised Railway Foreign Object Detection Method Based on GAN. In Proceedings of the 5th International Conference on Computer Science and Application Engineering, Sanya, China, 19–21 October 2021. [Google Scholar]
- Rampriya, R.S.; Suganya, R.; Nathan, S.; Perumal, P.S. A Comparative Assessment of Deep Neural Network Models for Detecting Obstacles in the Real Time Aerial Railway Track Images. Appl. Artif. Intell. 2022, 36, 2018184. [Google Scholar] [CrossRef]
- Prakash, R.M.; Vimala, M.; Keerthana, S.; Kokila, P.; Sneha, S. Machine Learning based Obstacle Detection for Avoiding Accidents on Railway Tracks. In Proceedings of the 2023 7th International Conference on Intelligent Computing and Control Systems (ICICCS), Madurai, India, 17–19 May 2023; pp. 236–241. [Google Scholar]
- Feng, J.; Li, T.; Niu, Q.; Wang, B. Automatic Learning Technology of Railway Based on Deep Learning for Railway Obstacle Avoidance. DEStech Trans. Comput. Sci. Eng. 2019, 1039, 73–78. [Google Scholar] [CrossRef]
- Pan, H.; Li, Y.; Wang, H.; Tian, X. Railway Obstacle Intrusion Detection Based on Convolution Neural Network Multitask Learning. Electronics 2022, 11, 2697. [Google Scholar] [CrossRef]
- Meng, C.; Wang, Z.; Shi, L.; Gao, Y.; Tao, Y.; Wei, L. SDRC-YOLO: A Novel Foreign Object Intrusion Detection Algorithm in Railway Scenarios. Electronics 2023, 12, 1256. [Google Scholar] [CrossRef]
- Wang, S.; Wang, Y.; Chang, Y.; Zhao, R.; She, Y. EBSE-YOLO: High Precision Recognition Algorithm for Small Target Foreign Object Detection. IEEE Access 2023, 11, 57951–57964. [Google Scholar] [CrossRef]
- Qi, Z.; Ma, D.; Xu, J.; Xiang, A.; Qu, H. Improved YOLOv5 Based on Attention Mechanism and FasterNet for Foreign Object Detection on Railway and Airway tracks. arXiv 2024, arXiv:2403.08499. [Google Scholar]
- Cao, Y.; Pan, H.; Wang, H.; Xu, X.; Li, Y.; Tian, Z.; Zhao, X. Small Object Detection Algorithm for Railway Scene. In Proceedings of the 2022 7th International Conference on Image, Vision and Computing (ICIVC), Xi’an, China, 26–28 July 2022; pp. 100–105. [Google Scholar]
- Qin, Y.; He, D.; Jin, Z.; Chen, Y.; Shan, S. An Improved Deep Learning Algorithm for Obstacle Detection in Complex Rail Transit Environments. IEEE Sens. J. 2024, 24, 4011–4022. [Google Scholar] [CrossRef]
- Guo, B.; Yang, L.; Shi, H.; Wang, Y. High speed railway foreign bodies intrusion detection based on rapid background difference algorithm. J. Instrum. Meters 2016, 37, 8. [Google Scholar]
- Kapoor, R.; Goel, R.; Sharma, A. An intelligent railway surveillance framework based on recognition of object and railway track using deep learning. Multimed. Tools Appl. 2022, 81, 21083–21109. [Google Scholar] [CrossRef]
- Chen, Z.; Niu, W.; Wu, C.; Zhang, L.; Wang, Y. Near Real-time Situation Awareness and Anomaly Detection for Complex Railway Environment. In Proceedings of the 2021 IEEE Conference on Cognitive and Computational Aspects of Situation Management (CogSIMA), Tallinn, Estonia, 14–22 May 2021; pp. 1–8. [Google Scholar]
- Appiah, E.O.; Mensah, S. Object detection in adverse weather condition for autonomous vehicles. Multimed. Tools Appl. 2023, 83, 28235–28261. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-Sensor Fusion in Automated Driving: A Survey. IEEE Access 2020, 8, 2847–2868. [Google Scholar] [CrossRef]
- Liu, J.; Zhu, X.; Liu, F.; Guo, L.; Zhao, Z.; Sun, M.; Wang, W.; Lu, H.; Zhou, S.; Zhang, J.; et al. OPT: Omni-Perception Pre-Trainer for Cross-Modal Understanding and Generation. arXiv 2021, arXiv:2107.00249. [Google Scholar]
- Cai, H.; Li, F.; Gao, D.; Yang, Y.; Li, S.; Gao, K.; Qin, A.; Hu, C.; Huang, Z. Foreign Objects Intrusion Detection Using Millimeter Wave Radar on Railway Crossings. In Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Toronto, ON, Canada, 11–14 October 2020; pp. 2776–2781. [Google Scholar]
- Yanwei, J.; Yu, D. Research on Railway Obstacle Detection Method Based on Radar. In Proceedings of the 2021 7th International Symposium on Mechatronics and Industrial Informatics (ISMII), Zhuhai, China, 22–24 January 2021; pp. 222–226. [Google Scholar]
- Richter, Y.; Balal, N.; Pinhasi, Y. Neural-Network-Based Target Classification and Range Detection by CW MMW Radar. Remote. Sens. 2023, 15, 4553. [Google Scholar] [CrossRef]
- Narayanan, A.H.; Brennan, P.; Benjamin, R.; Mazzino, N.; Bochetti, G.; Lancia, A. Railway level crossing obstruction detection using MIMO radar. In Proceedings of the 2011 8th European Radar Conference, Manchester, UK, 12–14 October 2011; pp. 57–60. [Google Scholar]
- Pan, Z.; Ding, F.; Zhong, H.; Lu, C.X. Moving Object Detection and Tracking with 4D Radar Point Cloud. arXiv 2023, arXiv:2309.09737. [Google Scholar]
- Yan, Q.; Wang, Y. MVFAN: Multi-View Feature Assisted Network for 4D Radar Object Detection. arXiv 2023, arXiv:2310.16389. [Google Scholar]
- Shi, W.; Zhu, Z.; Zhang, K.; Chen, H.; Yu, Z.; Zhu, Y. SMIFormer: Learning Spatial Feature Representation for 3D Object Detection from 4D Imaging Radar via Multi-View Interactive Transformers. Sensors 2023, 23, 9429. [Google Scholar] [CrossRef]
- Amaral, V.; Marques, F.; Lourenço, A.; Barata, J.; Santana, P.F. Laser-Based Obstacle Detection at Railway Level Crossings. J. Sensors 2016, 2016, 1719230. [Google Scholar] [CrossRef]
- Yu, X.; He, W.; Qian, X.; Yang, Y.; Zhang, T.; Ou, L. Real-time rail recognition based on 3D point clouds. Meas. Sci. Technol. 2022, 33, 105207. [Google Scholar] [CrossRef]
- Qu, J.; Li, S.; Li, Y.; Liu, L. Research on Railway Obstacle Detection Method Based on Developed Euclidean Clustering. Electronics 2023, 12, 1175. [Google Scholar] [CrossRef]
- Wisultschew, C.; Mujica, G.; Lanza-Gutierrez, J.M.; Portilla, J. 3D-LIDAR Based Object Detection and Tracking on the Edge of IoT for Railway Level Crossing. IEEE Access 2021, 9, 35718–35729. [Google Scholar] [CrossRef]
- Shinoda, N.; Takeuchi, T.; Kudo, N.; Mizuma, T. Fundamental experiment for utilizing LiDAR sensor for railway. Int. J. Transp. Dev. Integr. 2018, 2, 319–329. [Google Scholar] [CrossRef]
- Charles, R.Q.; Su, H.; Kaichun, M.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 77–85. [Google Scholar] [CrossRef]
- Zhou, Y.; Tuzel, O. VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4490–4499. [Google Scholar]
- Lang, A.H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; Beijbom, O. PointPillars: Fast Encoders for Object Detection From Point Clouds. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 12689–12697. [Google Scholar]
- Shi, S.; Wang, X.; Li, H. PointRCNN: 3D Object Proposal Generation and Detection From Point Cloud. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 770–779. [Google Scholar]
- Sinha, D.; Feroz, F. Obstacle Detection on Railway Tracks Using Vibration Sensors and Signal Filtering Using Bayesian Analysis. IEEE Sens. J. 2016, 16, 642–649. [Google Scholar] [CrossRef]
- Catalano, A.; Bruno, F.A.; Galliano, C.; Pisco, M.; Persiano, G.V.; Cutolo, A.; Cusano, A. An optical fiber intrusion detection system for railway security. Sens. Actuators A-Phys. 2017, 253, 91–100. [Google Scholar] [CrossRef]
- Nan, Q.; Li, S.; Yao, Y.; Li, Z.; Wang, H.; Wang, L.; Sun, L. A Novel Monitoring Approach for Train Tracking and Incursion Detection in Underground Structures Based on Ultra-Weak FBG Sensing Array. Sensors 2019, 19, 2666. [Google Scholar] [CrossRef]
- Qu, J.; Liu, Y.; Zhang, J.; Cheng, Y. A Method to Monitor Railway Tracks’ Foreign Body Invasion Based on Phase Sensitive Optical Fiber Sensing Technology. In Proceedings of the 2017 International Conference on Smart Grid and Electrical Automation (ICSGEA), Changsha, China, 27–28 May 2017; pp. 315–319. [Google Scholar]
- Meng, H. Research on Intelligent Monitoring and Identification Methods for Railway Safety Based on Fiber Optic Sensing Technology. Ph.D. Thesis, Beijing Jiaotong University, Beijing, China, 2022. [Google Scholar]
- Fang, X. Research on Railway Perimeter Intrusion Localization and Identification Algorithm Based on Mach Zehnder Interferometer. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2021. [Google Scholar]
- Berg, A.; Öfjäll, K.; Ahlberg, J.; Felsberg, M. Detecting Rails and Obstacles Using a Train-Mounted Thermal Camera. In Proceedings of the 19th Scandinavian Conference, SCIA 2015, Copenhagen, Denmark, 15–17 June 2015. [Google Scholar]
- Passarella, R.; Tutuko, B.; Prasetyo, A.P. Design concept of train obstacle detection system in Indonesia. IJRRAS 2011, 9, 453–460. [Google Scholar]
- Kapoor, R.; Goel, R.; Sharma, A. Deep Learning Based Object and Railway Track Recognition Using Train Mounted Thermal Imaging System. J. Comput. Theor. Nanosci. 2020, 17, 5062–5071. [Google Scholar] [CrossRef]
- Wang, Z. Research on Railway Foreign Object Detection and Tracking Algorithm in Infrared Weak Light Environment. Master’s Thesis, Lanzhou Jiaotong University, Lanzhou, China, 2023. [Google Scholar]
- Li, Y.; Liu, Y.; Dong, H.; Hu, W.; Lin, C. Intrusion detection of railway clearance from infrared images using generative adversarial networks. J. Intell. Fuzzy Syst. 2021, 40, 3931–3943. [Google Scholar] [CrossRef]
- Yang, S.; Chen, Z.; Ma, X.; Zong, X.; Feng, Z. Real-time high-precision pedestrian tracking: A detection–tracking–correction strategy based on improved SSD and Cascade R-CNN. J. Real-Time Image Process. 2021, 19, 287–302. [Google Scholar] [CrossRef]
- Kosuge, A.; Suehiro, S.; Hamada, M.; Kuroda, T. mmWave-YOLO: A mmWave Imaging Radar-Based Real-Time Multiclass Object Recognition System for ADAS Applications. IEEE Trans. Instrum. Meas. 2022, 71, 1–10. [Google Scholar] [CrossRef]
- Liu, X.; Cai, Z. Advanced obstacles detection and tracking by fusing millimeter wave radar and image sensor data. ICCAS 2010, 2010, 1115–1120. [Google Scholar]
- Wang, Z.; Miao, X.; Huang, Z.; Luo, H. Research of Target Detection and Classification Techniques Using Millimeter-Wave Radar and Vision Sensors. Remote. Sens. 2021, 13, 1064. [Google Scholar] [CrossRef]
- Lamane, M.; Tabaa, M.; Klilou, A. New Approach Based on Pix2Pix–YOLOv7 mmWave Radar for Target Detection and Classification. Sensors 2023, 23, 9456. [Google Scholar] [CrossRef]
- Song, Y.; Xie, Z.; Wang, X.; Zou, Y. MS-YOLO: Object Detection Based on YOLOv5 Optimized Fusion Millimeter-Wave Radar and Machine Vision. IEEE Sens. J. 2022, 22, 15435–15447. [Google Scholar] [CrossRef]
- Guan, R.; Yao, S.; Zhu, X.; Man, K.L.; Yue, Y.; Smith, J.S.; Lim, E.G.; Yue, Y. Efficient-VRNet: An Exquisite Fusion Network for Riverway Panoptic Perception based on Asymmetric Fair Fusion of Vision and 4D mmWave Radar. arXiv 2023, arXiv:2308.10287. [Google Scholar]
- Shuai, X.; Shen, Y.; Tang, Y.; Shi, S.; Ji, L.; Xing, G. Millieye: A lightweight mmwave radar and camera fusion system for robust object detection. In Proceedings of the International Conference on Internet-of-Things Design and Implementation, Charlottesville, VA, USA, 18–21 May 2021; pp. 145–157. [Google Scholar]
- Guo, P.; Shi, T.; Ma, Z.; Wang, J. Human intrusion detection for high-speed railway perimeter under all-weather condition. Railw. Sci. 2024, 3, 97–110. [Google Scholar] [CrossRef]
- Ding, Q.; Li, P.; Yan, X.; Shi, D.; Liang, L.; Wang, W.; Xie, H.; Li, J.; Wei, M. CF-YOLO: Cross Fusion YOLO for Object Detection in Adverse Weather With a High-Quality Real Snow Dataset. IEEE Trans. Intell. Transp. Syst. 2022, 24, 10749–10759. [Google Scholar] [CrossRef]
- Christian, A.B.; Wu, Y.; Lin, C.; Van, L.; Tseng, Y. Radar and Camera Fusion for Object Forecasting in Driving Scenarios. In Proceedings of the 2022 IEEE 15th International Symposium on Embedded Multicore/Many-core Systems-on-Chip (MCSoC), Penang, Malaysia, 19–22 December 2022; pp. 105–111. [Google Scholar]
- Nabati, R.; Qi, H. CenterFusion: Center-based Radar and Camera Fusion for 3D Object Detection. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021; pp. 1526–1535. [Google Scholar]
- Han, X.; Wang, H.; Lu, J.; Zhao, C. Road detection based on the fusion of Lidar and image data. Int. J. Adv. Robot. Syst. 2017, 14, 1–10. [Google Scholar] [CrossRef]
- Wang, Z.; Jia, K. Frustum ConvNet: Sliding Frustums to Aggregate Local Point-Wise Features for a modal 3D Object Detection. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 1742–1749. [Google Scholar]
- Wang, Z.; Yu, G.; Wu, X.; Li, H.; Li, D. A Camera and LiDAR Data Fusion Method for Railway Object Detection. IEEE Sens. J. 2021, 21, 13442–13454. [Google Scholar]
- Cao, J.; Li, Y.; Du, S. Robust Artificial Intelligence-Aided Multimodal Rail-Obstacle Detection Method by Rail Track Topology Reconstruction. Appl. Sci. 2024, 14, 2795. [Google Scholar] [CrossRef]
- Miickel, S.; Scherer, F.; Schuster, P.F. Multi-sensor obstacle detection on railway tracks. In Proceedings of the IEEE IV2003 Intelligent Vehicles Symposium. Proceedings (Cat. No.03TH8683), Columbus, OH, USA, 9–11 June 2003; pp. 42–46. [Google Scholar]
- Shen, Z.; He, Y.; Du, X.; Yu, J.; Wang, H.; Wang, Y. YCANet: Target Detection for Complex Traffic Scenes Based on Camera-LiDAR Fusion. IEEE Sens. J. 2024, 24, 8379–8389. [Google Scholar] [CrossRef]
- Xiao, T.; Xu, Y.; Yu, H. Research on Obstacle Detection Method of Urban Rail Transit Based on Multisensor Technology. J. Artif. Intell. Technol. 2021, 1, 61–67. [Google Scholar] [CrossRef]
- Wen, L.; Peng, Y.; Lin, M.; Gan, N.; Tan, R. Multi-Modal Contrastive Learning for LiDAR Point Cloud Rail-Obstacle Detection in Complex Weather. Electronics 2024, 13, 220. [Google Scholar] [CrossRef]
- Mai, N.A.; Duthon, P.; Khoudour, L.; Crouzil, A.; Velastín, S.A. 3D Object Detection with SLS-Fusion Network in Foggy Weather Conditions. Sensors 2021, 21, 6711. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Xu, C.; Zhang, W.; Fu, H.; Ma, Z.; Yang, X. Research on Intercity Railway Perimeter Intrusion Monitoring and Alarm Technology Based on Lidar and Video. Railw. Transp. Econ. 2023, 45, 134–142. [Google Scholar] [CrossRef]
- Dreissig, M.; Scheuble, D.; Piewak, F.; Boedecker, J. Survey on LiDAR Perception in Adverse Weather Conditions. In Proceedings of the 2023 IEEE Intelligent Vehicles Symposium (IV), Anchorage, AK, USA, 4–7 June 2023; pp. 1–8. [Google Scholar]
- Gasparini, R.; D’Eusanio, A.; Borghi, G.; Pini, S.; Scaglione, G.; Calderara, S.; Fedeli, E.; Cucchiara, R. Anomaly Detection, Localization and Classification for Railway Inspection. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 3419–3426. [Google Scholar]
- Zhou, X. Research on Railway Foreign Object Intrusion Detection Method Based on Multi-Source Image Fusion. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2018. [Google Scholar]
- Xu, X. Research on Railway Foreign Object Intrusion Detection Method Based on Target Enhancement Fusion. Master’s Thesis, Beijing Jiaotong University, Beijing, China, 2021. [Google Scholar]
- Gasparini, R.; Pini, S.; Borghi, G.; Scaglione, G.; Calderara, S.; Fedeli, E.; Cucchiara, R. Anomaly Detection for Vision-Based Railway Inspection. In Proceedings of the EDCC Workshops, Munich, Germany, 7 September 2020. [Google Scholar]
- Kim, S.; Shim, M.; Choi, B.; Kim, J.; Yang, Y. Image and sensor los-based automatic horizontal line detection and tracking for infrared search and track. In Proceedings of the 2012 IEEE International Conference on Automation Science and Engineering (CASE), Seoul, Republic of Korea, 20–24 August 2012; pp. 718–723. [Google Scholar]
- Xie, J.; Jin, X.; Cao, H. SMRD: A Local Feature Descriptor for Multi-modal Image Registration. In Proceedings of the 2021 International Conference on Visual Communications and Image Processing (VCIP), Munich, Germany, 5–8 December 2021; pp. 1–5. [Google Scholar]
- Zhou, J. Railway Perimeter Monitoring System Based on Vibration Fiber Optic and Video Analysis Technology. Railw. Commun. Signal 2019, 55, 52–55. [Google Scholar]
- Bai, M.; Yuan, Z.; Zhou, J. A high-speed railway perimeter protection system based on vibration fiber optic and video analysis technology. Inf. Technol. Informatiz. 2019, 2, 72–74. [Google Scholar]
- Li, Y.; Lv, Y.; Zhao, C.; Tang, X.; Zhang, Q.; Zhang, H. High speed rail perimeter foreign object intrusion perception and recognition system. Railw. Veh. 2022, 60, 68–72. [Google Scholar]
- Song, X.; Yuan, Q. High speed rail perimeter intrusion monitoring and alarm technology based on the fusion of multiple sensing technologies and its application. China Railw. 2023, 10, 143–150. [Google Scholar]
- Ma, X. Research on High-Speed Rail Perimeter Intrusion Detection Using Fiber Optic Sensing and Video Collaboration. Master’s Thesis, Xi’an University of Electronic Science and Technology, Xi’an, China, 2023. [Google Scholar]
- Zhao, Y. Research on Obstacle Radar Detection Technology for High Dynamic Railway Environment. Suzhou University: Suzhou, China, 2023. [Google Scholar]
- Garcia, J.; Ureña, J.; Hernández, A.; Mazo, M.; Vazquez, J.F.; Díaz, M.J. Multi-sensory system for obstacle detection on railways. In Proceedings of the 2008 IEEE Instrumentation and Measurement Technology Conference, Victoria, BC, Canada, 12–15 May 2008; pp. 2091–2096. [Google Scholar]
- Nakamura, K.; Kawasaki, K.; Iwasawa, N.; Yamaguchi, D.; Takeuchi, K.; Shibagaki, N.; Sato, Y.; Kashima, K.; Takahashi, M. Verification of Applicability of 90 GHz Band Millimeter-Wave for Obstacle Detection to Railway. IEEJ Trans. Electr. Electron. Eng. 2023, 18, 960–969. [Google Scholar] [CrossRef]
- Kyatsandra, A.K.; Saket, R.K.; Kumar, S.; Sarita, K.; Vardhan, A.S.S.; Vardhan, A.S.S. Development of TRINETRA: A Sensor Based Vision Enhancement System for Obstacle Detection on Railway Tracks. IEEE Sens. J. 2022, 22, 3147–3156. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, T.; Wang, Y.; Wang, Y.; Zhao, H. FUTR3D: A Unified Sensor Fusion Framework for 3D Detection. arXiv 2022, arXiv:2203.10642. 2022. [Google Scholar]
- Chavez-Garcia, R.O.; Aycard, O. Multiple Sensor Fusion and Classification for Moving Object Detection and Tracking. IEEE Trans. Intell. Transp. Syst. 2016, 17, 525–534. [Google Scholar] [CrossRef]
- Bijelic, M.; Gruber, T.; Mannan, F.; Kraus, F.; Ritter, W.; Dietmayer, K.C.; Heide, F. Seeing Through Fog Without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 11679–11689. [Google Scholar]
- Li, Y.; Yu, A.W.; Meng, T.; Caine, B.; Ngiam, J.; Peng, D.; Shen, J.; Lu, Y.; Zhou, D.; Le, Q.V.; et al. DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 17161–17170. [Google Scholar]
- Ren, S.; Zeng, Y.; Hou, J.; Chen, X. Corri2p: Deep image-to-point cloud registration via dense correspondence. IEEE Trans. Circuits Syst. Video Technol. 2023, 33, 1198–1208. [Google Scholar] [CrossRef]
- Wang, X.; Wang, X.; Zhou, Z. A high-accuracy calibration method for fusion systems of millimeter-wave radar and camera. Meas. Sci. Technol. 2022, 34, 015103. [Google Scholar] [CrossRef]
- Matas, J.; Chum, O.; Urban, M.; Pajdla, T. Robust wide-baseline stereo from maximally stable extremal regions. Image Vis. Comput. 2004, 22, 761–767. [Google Scholar] [CrossRef]
- Wei, Z.; Jung, C.; Su, C. RegiNet: Gradient guided multispectral image registration using convolutional neural networks. Neurocomputing 2020, 415, 193–200. [Google Scholar] [CrossRef]
- Wang, L.; Gao, C.; Zhao, Y.; Song, T.; Feng, Q. Infrared and Visible Image Registration Using Transformer Adversarial Network. In Proceedings of the 2018 25th IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 1248–1252. [Google Scholar]
- D’Amico, G.; Marinoni, M.; Nesti, F.; Rossolini, G.; Buttazzo, G.; Sabina, S.; Lauro, G. TrainSim: A Railway Simulation Framework for LiDAR and Camera Dataset Generation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 15006–15017. [Google Scholar] [CrossRef]
- Wu, Q. Research on Forward View Obstacle Detection Method for Rail Transit Based on Video and Point Cloud Fusion. Master’s Thesis, Suzhou University, Suzhou, China, 2022. [Google Scholar]
- Zendel, O.; Murschitz, M.; Zeilinger, M.; Steininger, D.; Abbasi, S.; Beleznai, C. RailSem19: A Dataset for Semantic Rail Scene Understanding. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 16–17 June 2019; pp. 1221–1229. [Google Scholar]
- Tagiew, R.; Klasek, P.; Tilly, R.; Köppel, M.; Denzler, P.; Neumaier, P.; Boekhoff, M.; Klasek, P.; Tilly, R. OSDaR23: Open Sensor Data for Rail 2023. In Proceedings of the 2023 8th International Conference on Robotics and Automation Engineering (ICRAE), Singapore, 17–19 November 2023; pp. 270–276. [Google Scholar]
- Alawad, H.; Kaewunruen, S.; An, M. Learning From Accidents: Machine Learning for Safety at Railway Stations. IEEE Access 2020, 8, 633–648. [Google Scholar] [CrossRef]
- Alawad, H.; An, M.; Kaewunruen, S. Utilizing an Adaptive Neuro-Fuzzy Inference System (ANFIS) for Overcrowding Level Risk Assessment in Railway Stations. Appl. Sci. 2020, 10, 5156. [Google Scholar] [CrossRef]
- Kaewunruen, S.; Alawad, H.; Cotruta, S. A Decision Framework for Managing the Risk of Terrorist Threats at Rail Stations Interconnected with Airports. Safety 2018, 4, 36. [Google Scholar] [CrossRef]
- Zhang, H.; Sun, Q. An Integrated Approach to Risk Assessment for Special Line Shunting via Fuzzy Theory. Symmetry 2018, 10, 599. [Google Scholar] [CrossRef]
- Šimić, V.; Sousek, R.; Jovčić, S. Picture Fuzzy MCDM Approach for Risk Assessment of Railway Infrastructure. Mathematics 2020, 8, 2259. [Google Scholar] [CrossRef]
- Liu, C.; Yang, S.; Chu, S.; Wang, C.; Liu, R. Application of Ensemble Learning and Expert Decision in Fuzzy Risk Assessment of Railway Signaling Safety. In Proceedings of the 2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC), Macau, China, 8–12 October 2022; pp. 3691–3697. [Google Scholar]
- China National Railway Group Co., Ltd. Guidelines for the Work of Safety Dual Prevention Mechanism (Trial); China National Railway Group Co., Ltd.: Beijing, China, 2019. [Google Scholar]
- National Railway Administration of the People’s Republic of China. Management Measures for Railway Safety Risk Grading Control and Hidden Danger Investigation and Treatment; National Railway Administration of the People’s Republic of China: Beijing, China, 2023. [Google Scholar]
- China National Railway Group Co., Ltd. Implementation Opinions of China National Railway Group on Strengthening the Construction of Railway Safety Governance System; China National Railway Group Co., Ltd.: Beijing, China, 2021. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).