
Comparative Analysis of Adaptation Behaviors of Different Types of Drivers to Steer-by-Wire Systems

Abstract
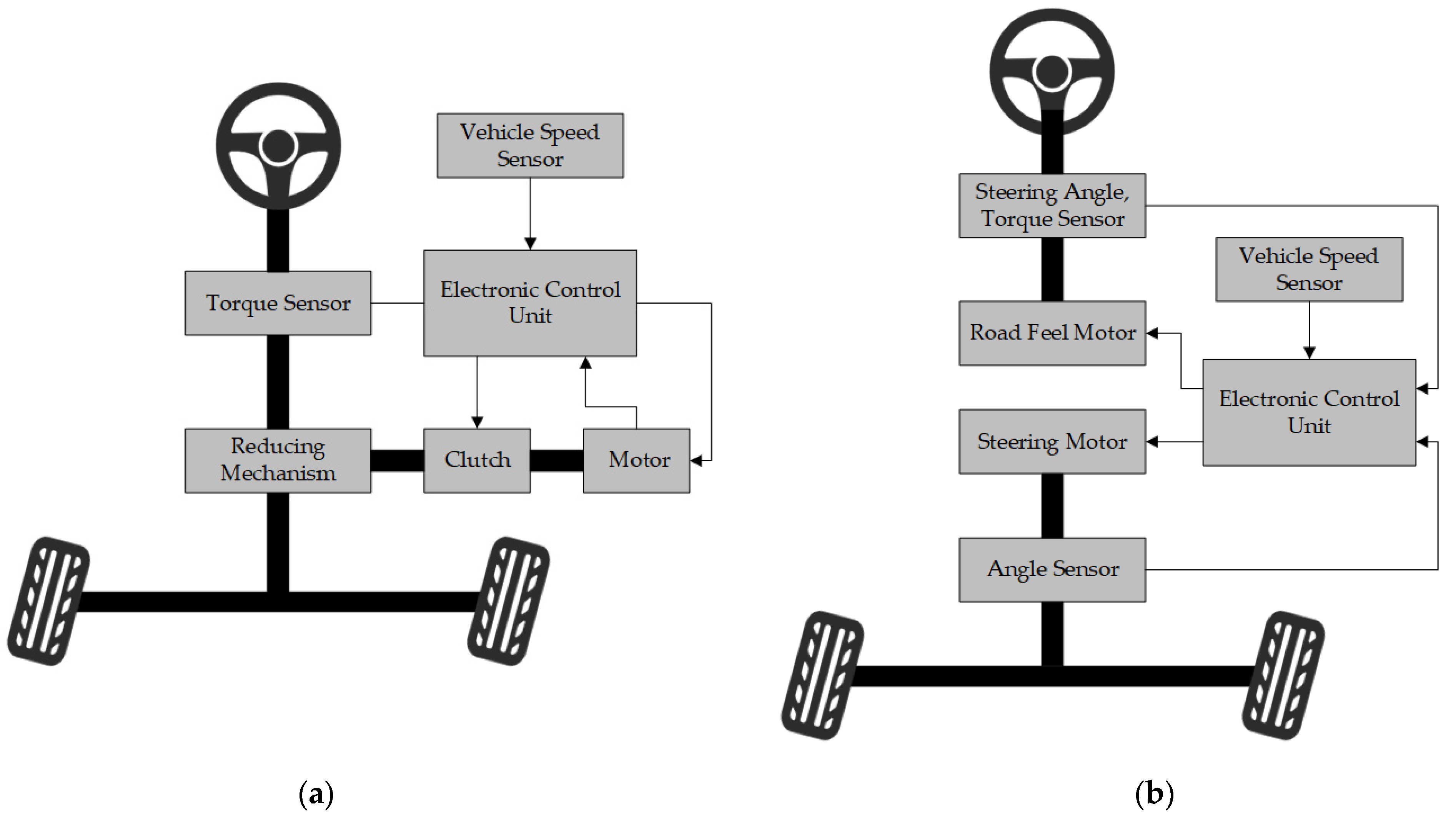
:1. Introduction
- Comparative analysis of driving behaviors: by contrasting the behaviors of experienced and novice drivers under traditional and steer-by-wire steering systems, the article reveals distinct characteristics in drivers’ acceptance and adaptation processes to the steer-by-wire steering systems;
- Exploration of factors influencing adaptability: The article investigates the impact of factors such as driving experience, skills, and styles on drivers’ adaptability to steer-by-wire systems. Through the collection and analysis of experimental data, it examines how different types of drivers adapt to changes in steering systems, offering new insights into understanding driver-behavioral adaptability;
- Observation and evaluation of novice drivers’ growth behavior: The article observes and evaluates the growth behavior of novice drivers under different steering systems. Analyzing their driving behaviors under traditional and steer-by-wire systems provides deeper insights into their progression from initial exposure to gradual mastery of new technology. This contributes to designing steer-by-wire systems tailored to novice drivers’ needs.
2. Method
2.1. Participants
2.2. Experimental Design
- (1)
- Questionnaire Design
- (2)
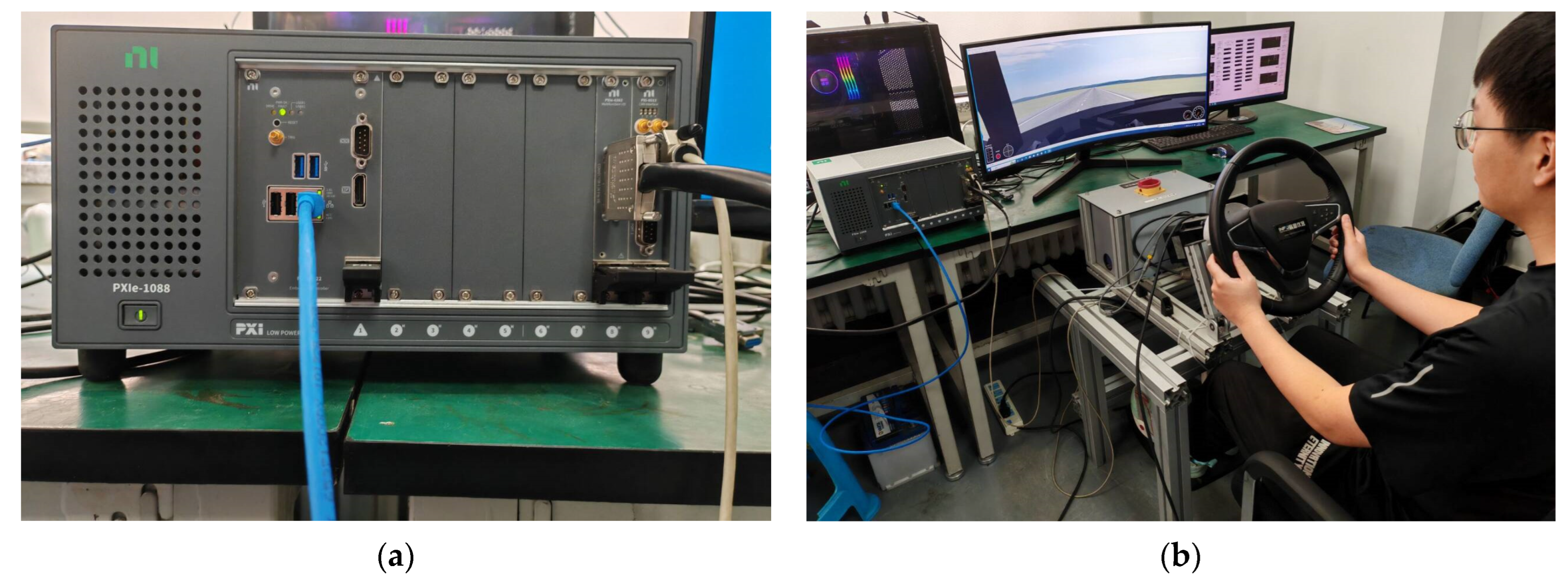
- Driving-Simulator Experiment Design
2.3. Produce
2.4. Data Collection and Statistical Analysis
3. Result
3.1. Driver Questionnaire Survey Results
3.2. Analysis of Driving Data Variation for Different Types of Drivers
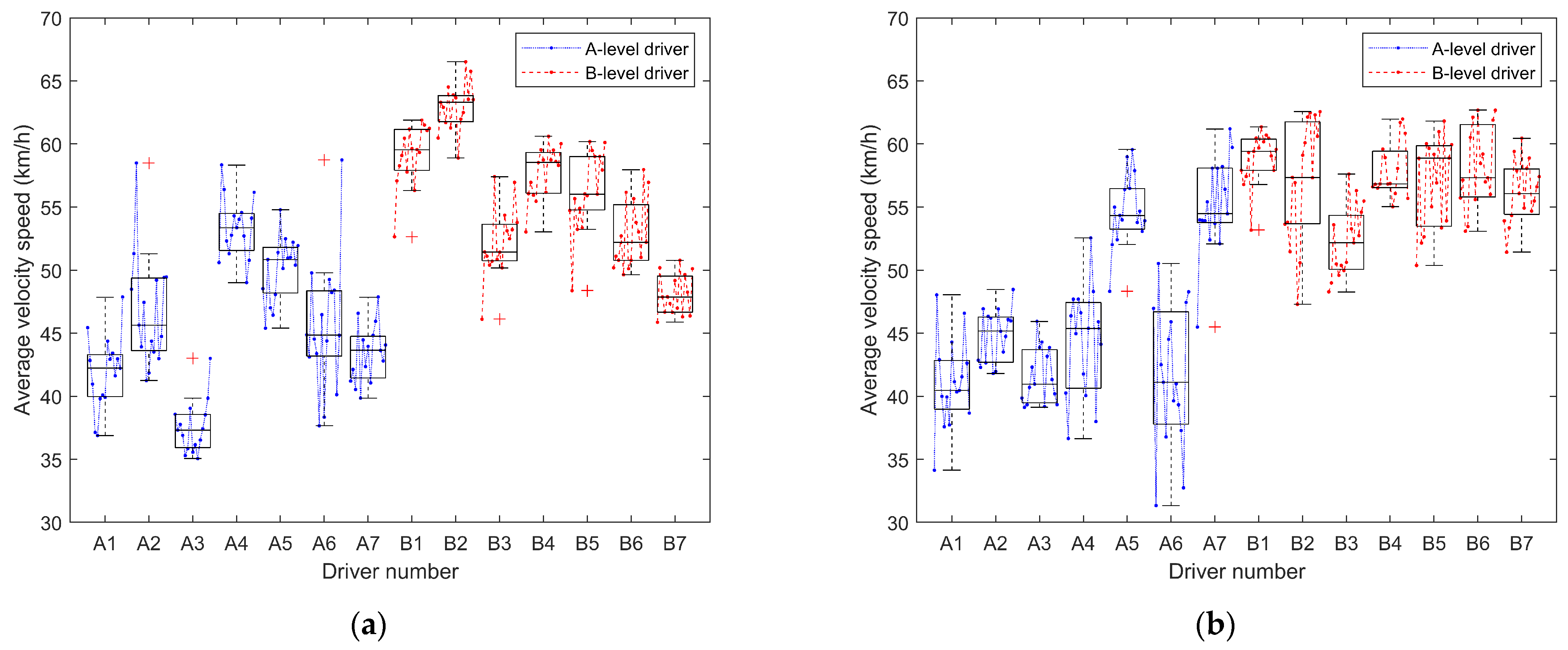
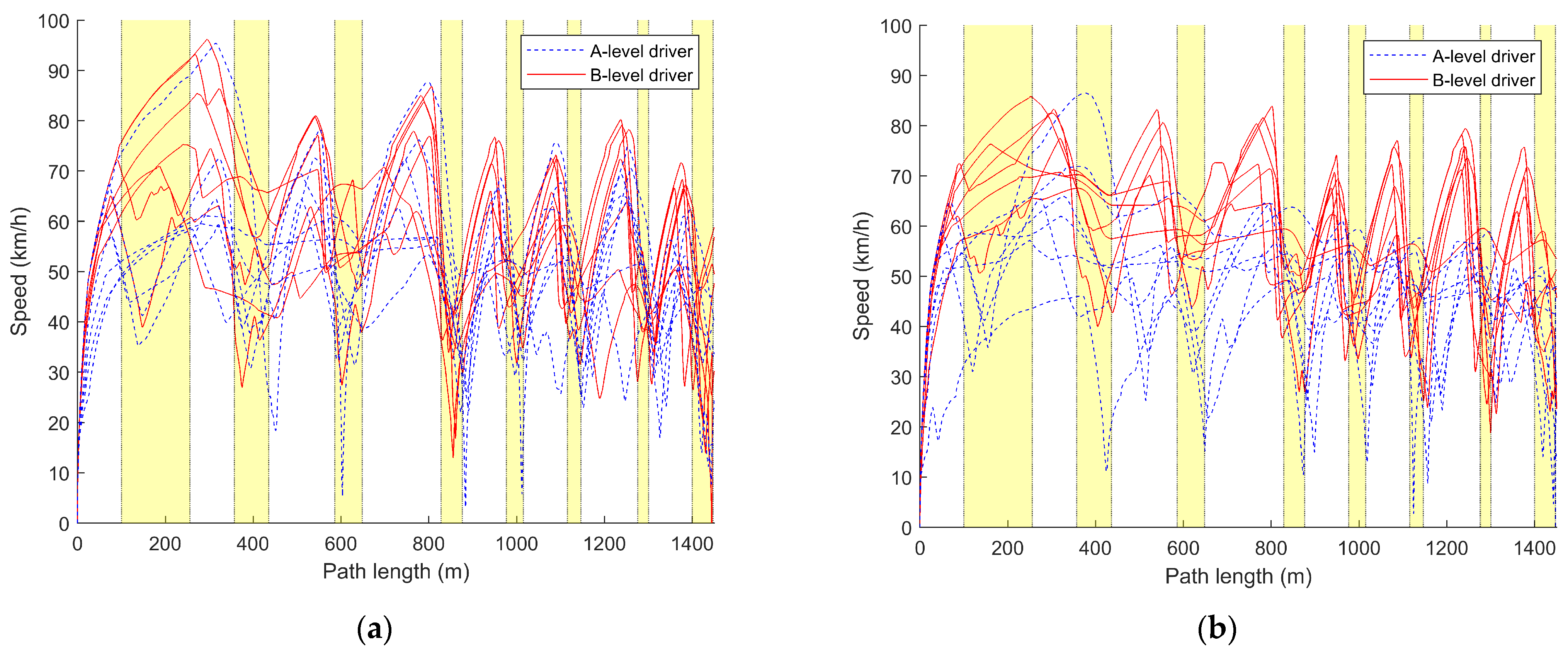
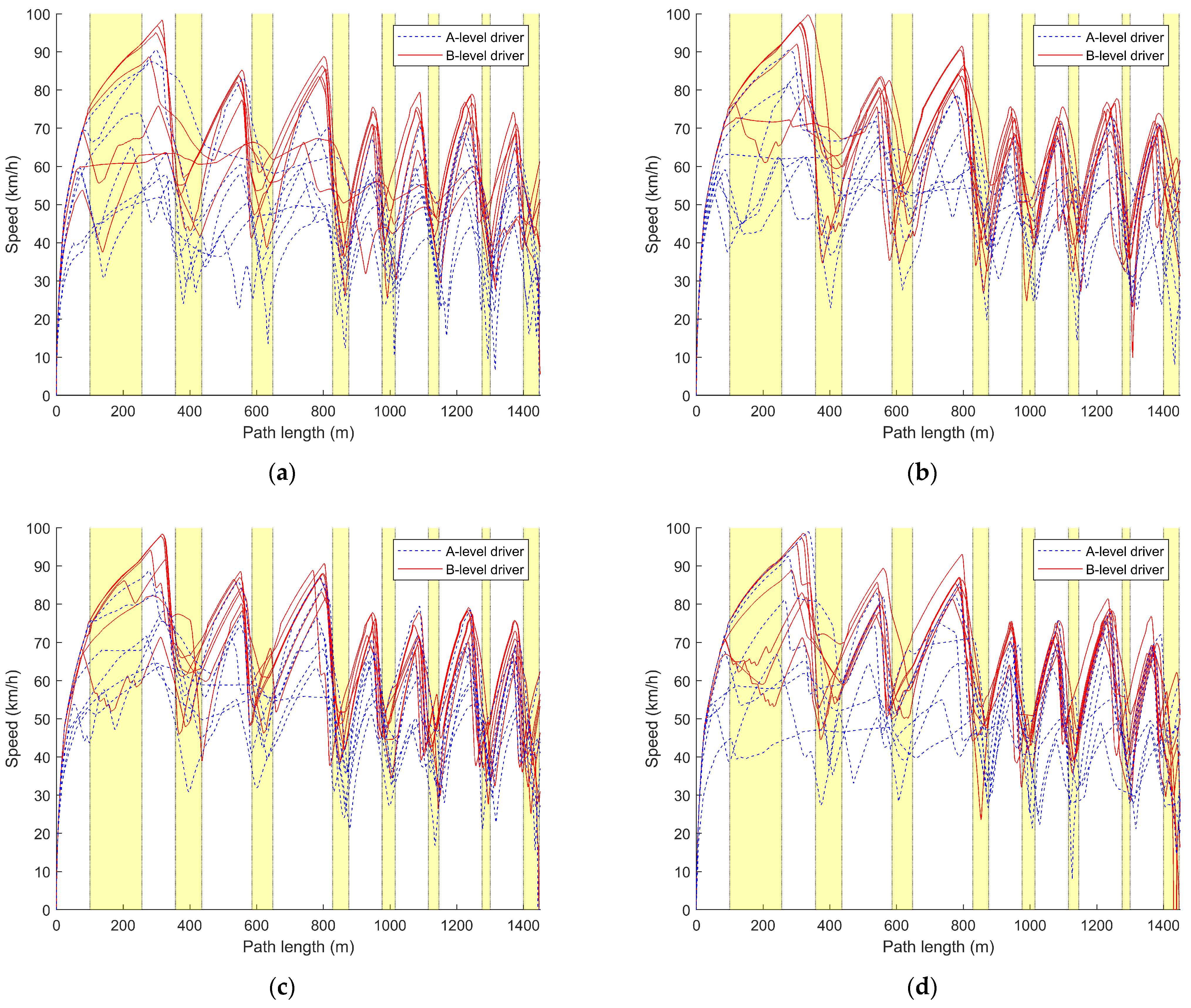
3.2.1. Speed Variation Curves
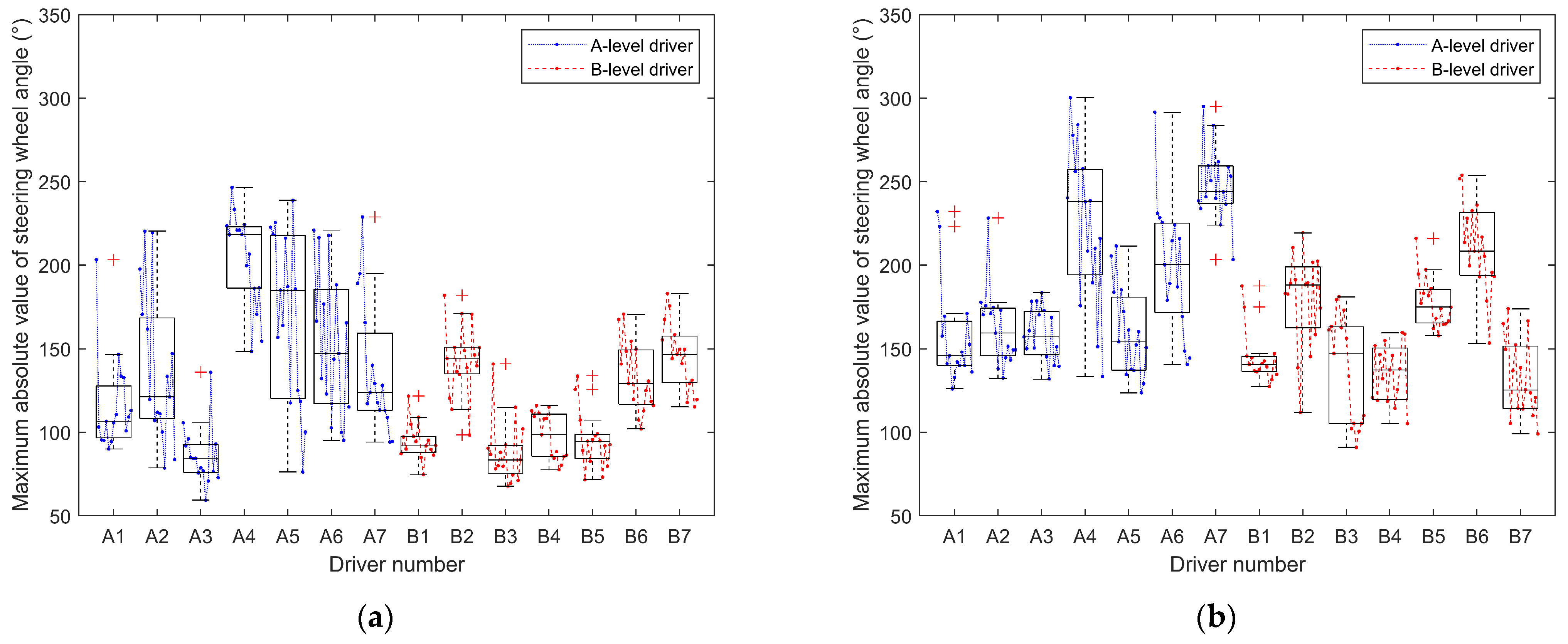
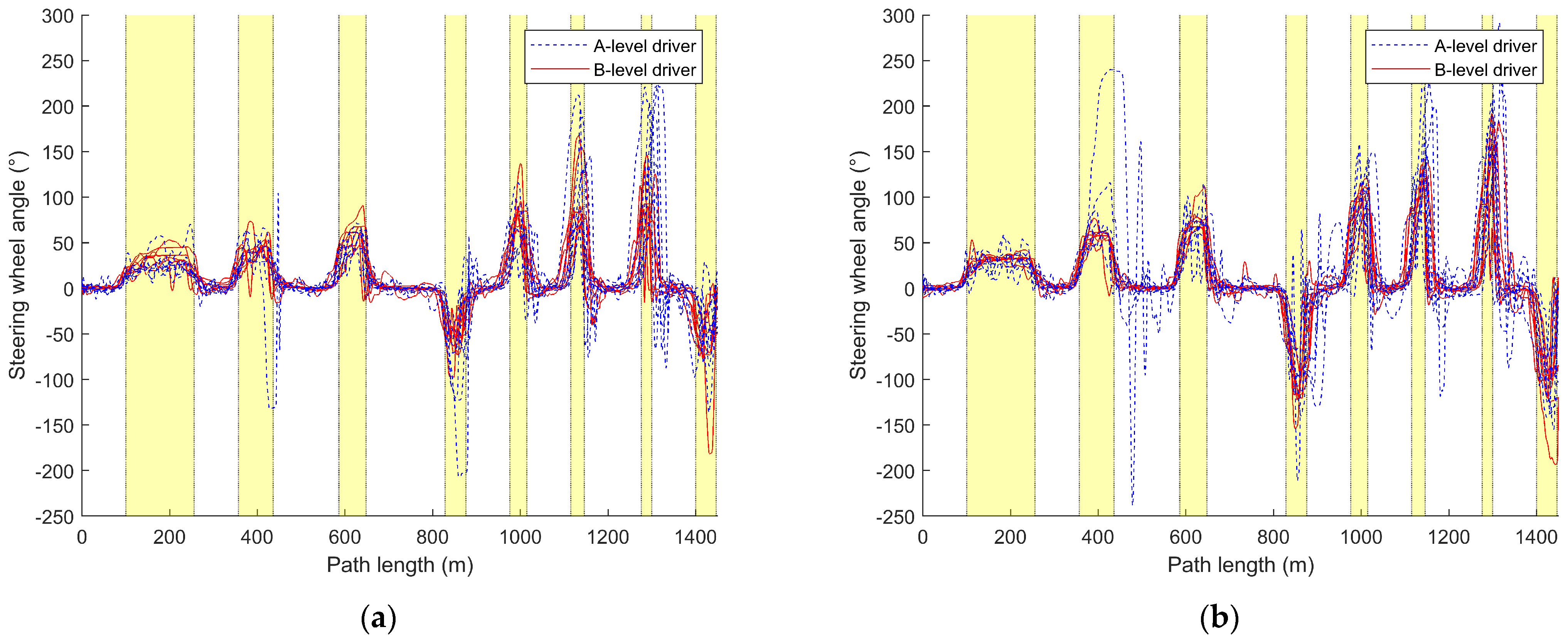
3.2.2. Steering-Wheel Angle Variation Curve
3.3. Adaptation of Different Types of Drivers’ Behavior
4. Discussion
4.1. Comparative Analysis of Different Types of Drivers Driving Different Steering Systems
4.2. Changes in Driver Behavioral Adaptation Caused by Steer-by-Wire Systems
4.3. Impact of Steer-by-Wire Systems on A-Level Drivers
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Zhang, Z.; Wang, Z.; Deng, J.; Dorrell, D.G. Chassis Coordinated Control for Full X-by-Wire Vehicles-A Review. Chin. J. Mech. Eng. 2021, 34, 11–35. [Google Scholar] [CrossRef]
- Husain, S.S.; Al-Dujaili, A.Q.; Jaber, A.A.; Humaidi, A.J.; Al-Azzawi, R.S. Design of a Robust Controller Based on Barrier Function for Vehicle Steer-by-Wire Systems. World Electr. Veh. J. 2024, 15, 17. [Google Scholar] [CrossRef]
- Su, C.; Li, H.; Qiao, B.; Wu, X. Personalized Steering Feel Design for Steer-by-Wire Systems Based on the Rack Force Estimation. Int. J. Automot. Technol. 2023, 24, 1151–1161. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Wang, Y. Adaptive discrete-time NN controller design for automobile steer-by-wire systems with angular velocity observer. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2023, 237, 722–736. [Google Scholar] [CrossRef]
- Mortazavizadeh, S.A.; Ghaderi, A.; Ebrahimi, M.; Hajian, M. Recent Developments in the Vehicle Steer-by-Wire System. IEEE Trans. Transp. Electrif. 2020, 6, 1226–1235. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, J.; Xia, G.; Khajepour, A. Human-Machine Shared Control for Industrial Vehicles: A Personalized Driver Behavior Recognition and Authority Allocation Scheme. IEEE Trans. Intell. Veh. 2024; early access. [Google Scholar]
- Song, S.; Chen, H.; Sun, H.; Liu, M. Data Efficient Reinforcement Learning for Integrated Lateral Planning and Control in Automated Parking System. Sensors 2020, 20, 7297. [Google Scholar] [CrossRef]
- Lloyd, S. Assessing Fitness to Drive for Commercial and Private Vehicle Drivers (Medical Standards for Licensing and Clinical Management Guidelines—A Resource for Health Professionals in Australia). Occup. Med. 2012, 62, 472–473. [Google Scholar] [CrossRef]
- Chen, X.; Wei, Z.; Gao, L. Professional Driver Suitability Evaluation. Procedia Eng. 2011, 15, 5222–5226. [Google Scholar]
- Lu, Y.; Liang, J.; Yin, G.; Xu, L.; Wu, J.; Feng, J.; Wang, F. A Shared Control Design for Steering Assistance System Considering Driver Behaviors. IEEE Trans. Intell. Veh. 2023, 8, 900–911. [Google Scholar] [CrossRef]
- Chen, J.; Chen, H.; Lan, X.; Zhong, B.; Ran, W. A Method to Develop the Driver-Adaptive Lane-Keeping Assistance System Based on Real Driver Preferences. Sensors 2024, 24, 1666. [Google Scholar] [CrossRef]
- Lin, R.; Ma, L.; Zhang, W. An interview study exploring Tesla driver behavioural adaptation. Appl. Ergon. 2018, 72, 37–47. [Google Scholar] [CrossRef] [PubMed]
- Ucińska, M. Adaptation to driver-assistance systems depending on experience. Open Eng. 2021, 11, 650–661. [Google Scholar] [CrossRef]
- Dotzauer, M.; de Waard, D.; Caljouw, S.R.; Pöhler, G.; Brouwer, W.H. Behavioral adaptation of young and older drivers to an intersection crossing advisory system. Accid. Anal. Prev. 2015, 74, 24–32. [Google Scholar] [CrossRef] [PubMed]
- Soni, S.; Reddy, N.; Tsapi, A.; van Arem, B.; Farah, H. Behavioral adaptations of human drivers interacting with automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2022, 86, 48–64. [Google Scholar] [CrossRef]
- Chen, N.; Zuo, J.Y.; Zu, Y. The Influence of Incentives on Drivers’ Aggressive Behaviors Toward Automated Vehicles. Int. J. Hum.–Comput. Interact. 2024. [Google Scholar] [CrossRef]
- Rudin-Brown, C.M.; Edquist, J.; Lenné, M.G. Effects of driving experience and sensation-seeking on drivers’ adaptation to road environment complexity. Saf. Sci. 2014, 62, 121–129. [Google Scholar] [CrossRef]
- Roman, G.D.; Poulter, D.; Barker, E.; McKenna, F.P.; Rowe, R. Novice drivers’ individual trajectories of driver behavior over the first three years of driving. Accid. Anal. Prev. 2015, 82, 61–69. [Google Scholar] [CrossRef]
- Cacciabue, P.C.; Saad, F. Behavioural adaptations to driver support systems: A modelling and road safety perspective. Cogn. Technol. Work. 2008, 10, 31–39. [Google Scholar] [CrossRef]
- Yang, B.; Saito, T.; Wang, Z.; Kitazaki, S.; Nakano, K. Influences of different traffic information on driver behaviors while interacting with oncoming traffic in level 2 automated driving. Int. J. Hum.-Comput. Interact. 2022, 40, 558–566. [Google Scholar] [CrossRef]
- Zhao, X.; Du, Y.; Yang, L.; Mao, E.; Guo, D.; Zhu, Z. Effects of Road Type and IVIS Task Type on Driver Behavior and Driving Performance in Agricultural Tractors. Int. J. Hum.-Comput. Interact. 2023, 40, 3159–3172. [Google Scholar] [CrossRef]
- Mecheri, S.; Rosey, F.; Lobjois, R. The effects of lane width, shoulder width, and road cross-sectional reallocation on drivers’ behavioral adaptations. Accid. Anal. Prev. 2017, 104, 65–73. [Google Scholar] [CrossRef]
- Schoenmakers, M.; Yang, D.; Farah, H. Car-following behavioural adaptation when driving next to automated vehicles on a dedicated lane on motorways: A driving simulator study in the Netherlands. Transp. Res. Part F Traffic Psychol. Behav. 2021, 78, 119–129. [Google Scholar] [CrossRef]
- Muslim, H.; Itoh, M. Long-Term Evaluation of Drivers’ Behavioral Adaptation to an Adaptive Collision Avoidance System. Hum. Factors 2021, 63, 1295–1315. [Google Scholar] [CrossRef]
- de Zwart, R.; Kamphuis, K.; Cleij, D. Driver behavioural adaptations to simulated automated vehicles, potential implications for traffic microsimulation. Transp. Res. Part F Traffic Psychol. Behav. 2023, 92, 255–265. [Google Scholar] [CrossRef]
- Nakagawa, C.; Yamada, S.; Hirata, D.; Shintani, A. Differences in Driver Behavior between Manual and Automatic Turning of an Inverted Pendulum Vehicle. Sensors 2022, 22, 9931. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Yamamoto, T. Review of Studies on Older Drivers’ Behavior and Stress-Methods, Results, and Outlook. Sensors 2021, 21, 3503. [Google Scholar] [CrossRef] [PubMed]
- de Haan, T.; Stuiver, A.; Lorist, M.M.; de Waard, D. Other road users’ adaptations to increase safety in response to older drivers’ behavior. Transp. Res. Part F Traffic Psychol. Behav. 2022, 84, 277–286. [Google Scholar] [CrossRef]
- Gregersen, N.P.; Berg, H.Y.; Engström, I.; Nolén, S.; Nyberg, A.; Rimmö, P.A. Sixteen years age limit for learner drivers in Sweden-an evaluation of safety effects. Accid. Anal. Prev. 2000, 32, 25–35. [Google Scholar] [CrossRef]
- Yang, Z.; Yu, Q.; Zhang, W.; Shen, H. A comparison of experienced and novice drivers’ rear-end collision avoidance maneuvers under urgent decelerating events. Transp. Res. Part F Traffic Psychol. Behav. 2021, 76, 353–368. [Google Scholar] [CrossRef]
- Day, M.R.; Thompson, A.R.; Poulter, D.R.; Stride, C.B.; Rowe, R. Why do drivers become safer over the first three months of driving? A longitudinal qualitative study. Accid. Anal. Prev. 2018, 117, 225–231. [Google Scholar] [CrossRef]
- Mayhew, D.R.; Simpson, H.M.; Wood, K.M.; Lonero, L.; Clinton, K.M.; Johnson, A.G. On-road and simulated driving: Concurrent and discriminant validation. J. Saf. Res. 2011, 42, 267–275. [Google Scholar] [CrossRef]
- Himmels, C.; Venrooij, J.; Parduzi, A.; Peller, M.; Riener, A. The bigger the better? Investigating the effects of driving simulator fidelity on driving behavior and perception. Transp. Res. Part F Traffic Psychol. Behav. 2024, 101, 250–266. [Google Scholar] [CrossRef]
- Shyrokau, B.; De Winter, J.; Stroosma, O.; Dijksterhuis, C.; Loof, J.; van Paassen, R.; Happee, R. The effect of steering-system linearity, simulator motion, and truck driving experience on steering of an articulated tractor-semitrailer combination. Appl. Ergon. 2018, 71, 17–28. [Google Scholar] [CrossRef] [PubMed]
- Melman, T.; Weijerman, M.; de Winter, J.; Abbink, D. Should steering settings be changed by the driver or by the vehicle itself? Hum. Factors 2024, 66, 1201–1215. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.N.; Zhang, J.C.; Zheng, H.Y. A modified handling stability control strategy for steer-by-wire vehicles based on variable steering ratio and active front steering control. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024. [Google Scholar] [CrossRef]
- Mumcuoglu, M.E.; Alcan, G.; Unel, M.; Cicek, O.; Mutluergil, M.; Yilmaz, M.; Koprubasi, K. Driver Evaluation in Heavy Duty Vehicles Based on Acceleration and Braking Behaviors. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020. [Google Scholar]
- Joshi, S.S.; Maas, N.; Schramm, D. A Vehicle Dynamics Based Algorithm for Driver Evaluation. In Proceedings of the 11th International Conference on Intelligent Systems and Control (ISCO), Karpagam Coll Engn, Coimbatore, India, 5–6 January 2017. [Google Scholar]
- Yang, Y.; Liu, Y.; Wang, M.; Ji, R.; Ji, X. Objective Evaluation Method of Steering Comfort Based on Movement Quality Evaluation of Driver Steering Maneuver. Chin. J. Mech. Eng. 2014, 27, 1027–1037. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| A-Level Driver | ||||||||
| Steer-by-Wire System | Traditional Steering System | |||||||
| 1 | 2 | … | 15 | 1 | 2 | … | 15 | |
| Average Vehicle Speed (km/h) | 52.64 | 57.07 | … | 55.91 | 53.45 | 57.91 | … | 56.79 |
| Longitudinal Speed Standard Deviation | 24.89 | 22.74 | … | 21.18 | 16.37 | 18.98 | … | 19.14 |
| Maximum Steering-Wheel Angle (°) | 87.08 | 97.18 | … | 95.64 | 228.02 | 187.45 | … | 174.87 |
| Steering-Wheel Angle Standard Deviation | 29.29 | 30.61 | … | 30.12 | 43.77 | 43.04 | … | 42.84 |
| Driving Completion Time (s) | 86.00 | 92.84 | … | 95.32 | 103.38 | 95.50 | … | 96.28 |
| B-Level Driver | ||||||||
| Steer-by-Wire System | Traditional Steering System | |||||||
| 1 | 2 | … | 15 | 1 | 2 | … | 15 | |
| Average Vehicle Speed (km/h) | 45.43 | 42.85 | … | 40.97 | 34.15 | 48.04 | … | 42.90 |
| Longitudinal Speed Standard Deviation | 14.04 | 13.83 | … | 13.15 | 13.23 | 11.75 | … | 12.27 |
| Maximum Steering-Wheel Angle (°) | 203.17 | 103.03 | … | 95.38 | 232.10 | 223.30 | … | 157.60 |
| Steering-Wheel Angle Standard Deviation | 35.42 | 25.91 | … | 24.90 | 49.99 | 45.53 | … | 40.77 |
| Driving Completion Time (s) | 115.84 | 124.38 | … | 129.94 | 155.61 | 114.38 | … | 124.45 |
| A1 | A2 | … | A7 | B1 | B2 | … | B7 | |
|---|---|---|---|---|---|---|---|---|
| Driving style (Careful, General, Aggressive) | General | General | … | Aggressive | General | Aggressive | … | Careful |
| driving skill (Excellent, Good, Medium, Pass, Fail) | Good | Medium | … | Medium | Excellent | Good | … | Good |
| Understanding of the steer-by-wire system (Very familiar, Familiar, Uncertain, Unfamiliar, Very unfamiliar) | Familiar | Unfamiliar | … | Unfamiliar | Familiar | Familiar | … | Familiar |
| Trust in the steer-by-wire system (Very trust, Trust, Uncertain, Distrust, Very distrust) | Trust | Trust | … | Uncertain | Trust | Trust | … | Uncertain |
| Acceptance of steer-by-wire system (Very acceptable, Acceptable, Uncertain, Unacceptable, Very unacceptable) | Acceptable | Uncertain | … | Unacceptable | Acceptable | Acceptable | … | Acceptable |
| Steer-by-wire system driving experience (Very good, Good, Uncertain, Bad, Very bad) | Good | Good | … | Uncertain | Good | Good | … | Good |
| Feel the difference between the two types of steering systems | Yes | Deny | … | Deny | Yes | Yes | … | Yes |
| A1_SBW | A2_SBW | A3_SBW | A4_SBW | A5_SBW | A6_SBW | A7_SBW | A_SBW | |
| Mean | 41.901 | 46.806 | 37.529 | 53.385 | 50.106 | 45.480 | 43.423 | 45.519 |
| Median | 42.226 | 45.640 | 37.318 | 53.364 | 50.836 | 44.843 | 43.645 | 44.749 |
| Range | 10.984 | 17.225 | 7.953 | 9.330 | 9.387 | 21.071 | 8.010 | 23.672 |
| Standard deviation | 2.929 | 4.472 | 2.086 | 2.456 | 2.550 | 5.201 | 2.308 | 5.866 |
| B1_SBW | B2_SBW | B3_SBW | B4_SBW | B5_SBW | B6_SBW | B7_SBW | B_SBW | |
| Mean | 59.137 | 62.960 | 52.234 | 57.750 | 56.262 | 52.808 | 48.008 | 55.594 |
| Median | 59.547 | 63.302 | 51.436 | 58.531 | 56.020 | 52.204 | 47.867 | 56.031 |
| Range | 9.255 | 7.626 | 11.291 | 7.577 | 11.811 | 8.326 | 4.909 | 20.642 |
| Standard deviation | 2.462 | 1.954 | 2.799 | 2.071 | 3.196 | 2.714 | 1.607 | 5.205 |
| A1_nSBW | A2_nSBW | A3_nSBW | A4_nSBW | A5_nSBW | A6_nSBW | A7_nSBW | A_nSBW | |
| Mean | 41.067 | 44.792 | 41.569 | 44.423 | 54.719 | 41.688 | 55.142 | 46.200 |
| Median | 40.466 | 45.158 | 40.965 | 45.373 | 54.329 | 41.110 | 54.476 | 45.373 |
| Range | 13.897 | 6.658 | 6.819 | 15.901 | 11.241 | 19.199 | 15.700 | 29.864 |
| Standard deviation | 3.543 | 2.123 | 2.201 | 4.309 | 2.880 | 5.673 | 3.806 | 6.740 |
| B1_nSBW | B2_nSBW | B3_nSBW | B4_nSBW | B5_nSBW | B6_nSBW | B7_nSBW | B_nSBW | |
| Mean | 58.894 | 57.179 | 52.269 | 57.888 | 56.914 | 58.192 | 56.189 | 56.789 |
| Median | 59.413 | 57.350 | 52.179 | 56.836 | 58.869 | 57.318 | 56.072 | 56.986 |
| Range | 8.174 | 15.283 | 9.334 | 6.944 | 11.443 | 9.605 | 9.024 | 15.394 |
| Standard deviation | 2.046 | 4.857 | 2.832 | 2.212 | 3.672 | 3.225 | 2.502 | 3.695 |
| A1_SBW | A2_SBW | A3_SBW | A4_SBW | A5_SBW | A6_SBW | A7_SBW | A_SBW | |
| Mean | 115.96 | 138.89 | 85.76 | 203.93 | 169.15 | 154.03 | 137.20 | 143.56 |
| Median | 106.56 | 121.21 | 84.32 | 218.26 | 185.00 | 147.11 | 123.76 | 129.15 |
| Range | 113.18 | 141.81 | 76.54 | 98.18 | 162.65 | 125.93 | 134.60 | 187.17 |
| Standard deviation | 29.05 | 45.99 | 17.95 | 29.02 | 51.52 | 43.59 | 39.62 | 51.15 |
| B1_SBW | B2_SBW | B3_SBW | B4_SBW | B5_SBW | B6_SBW | B7_SBW | B_SBW | |
| Mean | 94.38 | 143.04 | 87.93 | 97.83 | 95.24 | 132.81 | 145.58 | 113.83 |
| Median | 92.17 | 144.00 | 83.42 | 98.49 | 94.64 | 129.22 | 146.66 | 108.94 |
| Range | 47.03 | 83.57 | 73.11 | 38.38 | 62.11 | 68.67 | 67.85 | 115.32 |
| Standard deviation | 11.13 | 21.92 | 19.30 | 14.14 | 17.06 | 21.45 | 20.60 | 29.58 |
| A1_nSBW | A2_nSBW | A3_nSBW | A4_nSBW | A5_nSBW | A6_nSBW | A7_nSBW | A_nSBW | |
| Mean | 157.18 | 162.54 | 158.53 | 225.15 | 159.87 | 199.28 | 248.27 | 187.26 |
| Median | 145.77 | 159.36 | 157.12 | 238.03 | 154.13 | 200.48 | 243.96 | 173.08 |
| Range | 106.14 | 95.89 | 51.70 | 166.90 | 87.94 | 151.07 | 91.60 | 176.72 |
| Standard deviation | 31.24 | 23.61 | 16.21 | 48.30 | 27.02 | 40.34 | 22.49 | 46.39 |
| B1_nSBW | B2_nSBW | B3_nSBW | B4_nSBW | B5_nSBW | B6_nSBW | B7_nSBW | B_nSBW | |
| Mean | 144.46 | 179.06 | 138.09 | 135.18 | 177.95 | 210.68 | 133.00 | 159.77 |
| Median | 140.60 | 188.22 | 146.96 | 137.24 | 174.93 | 208.40 | 125.37 | 158.49 |
| Range | 60.08 | 107.44 | 90.11 | 54.40 | 58.14 | 100.57 | 74.80 | 162.89 |
| Standard deviation | 15.97 | 29.12 | 32.56 | 17.44 | 15.71 | 27.20 | 23.87 | 36.18 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, C.; Jin, L.; Zheng, H.; Zong, C. Comparative Analysis of Adaptation Behaviors of Different Types of Drivers to Steer-by-Wire Systems. Sensors 2024, 24, 5562. https://doi.org/10.3390/s24175562
Chen C, Jin L, Zheng H, Zong C. Comparative Analysis of Adaptation Behaviors of Different Types of Drivers to Steer-by-Wire Systems. Sensors. 2024; 24(17):5562. https://doi.org/10.3390/s24175562
Chicago/Turabian StyleChen, Chen, Liqiang Jin, Hongyu Zheng, and Changfu Zong. 2024. "Comparative Analysis of Adaptation Behaviors of Different Types of Drivers to Steer-by-Wire Systems" Sensors 24, no. 17: 5562. https://doi.org/10.3390/s24175562