
Detection of Debonding Defects in Carbon Fiber-Reinforced Polymer (CFRP)–Rubber Bonded Structures Based on Active Lamb Wave Energy Analysis

Abstract
:1. Introduction
2. Detection of Debonding Defects Based on the Energy Loss of Lamb Waves
2.1. Lamb Wave Energy Variations in Plate Bonded Structures
2.2. Principle of Interfacial Defect Detection Based on Lamb Wave Debonding Energy Loss
2.3. Interface Debonding DEF
3. Methods and Results
3.1. Excitation Signal Selection
3.2. Finite Element Development
3.2.1. Simulation Results
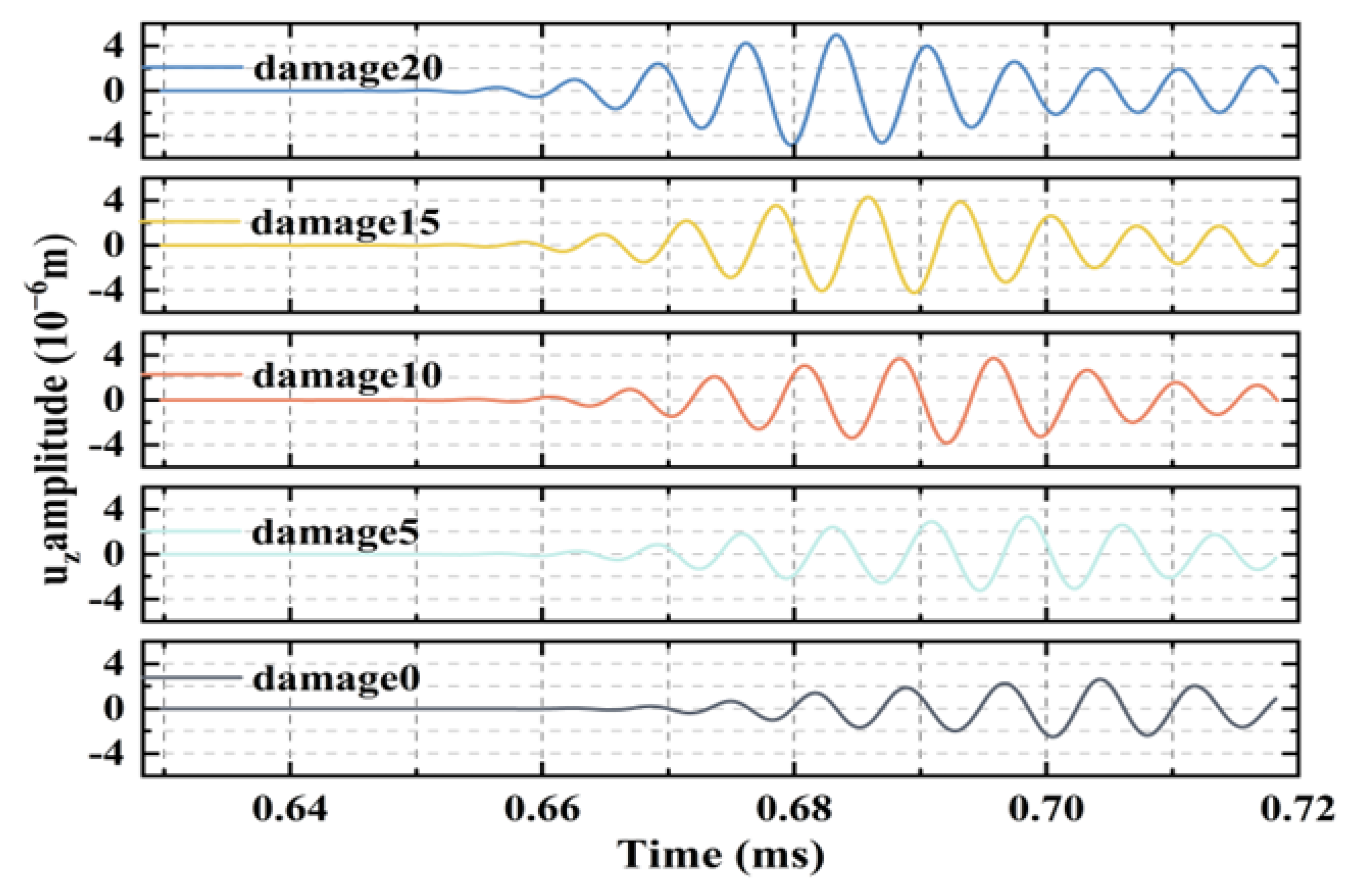
3.2.2. Time-Domain Analysis (Simulation)
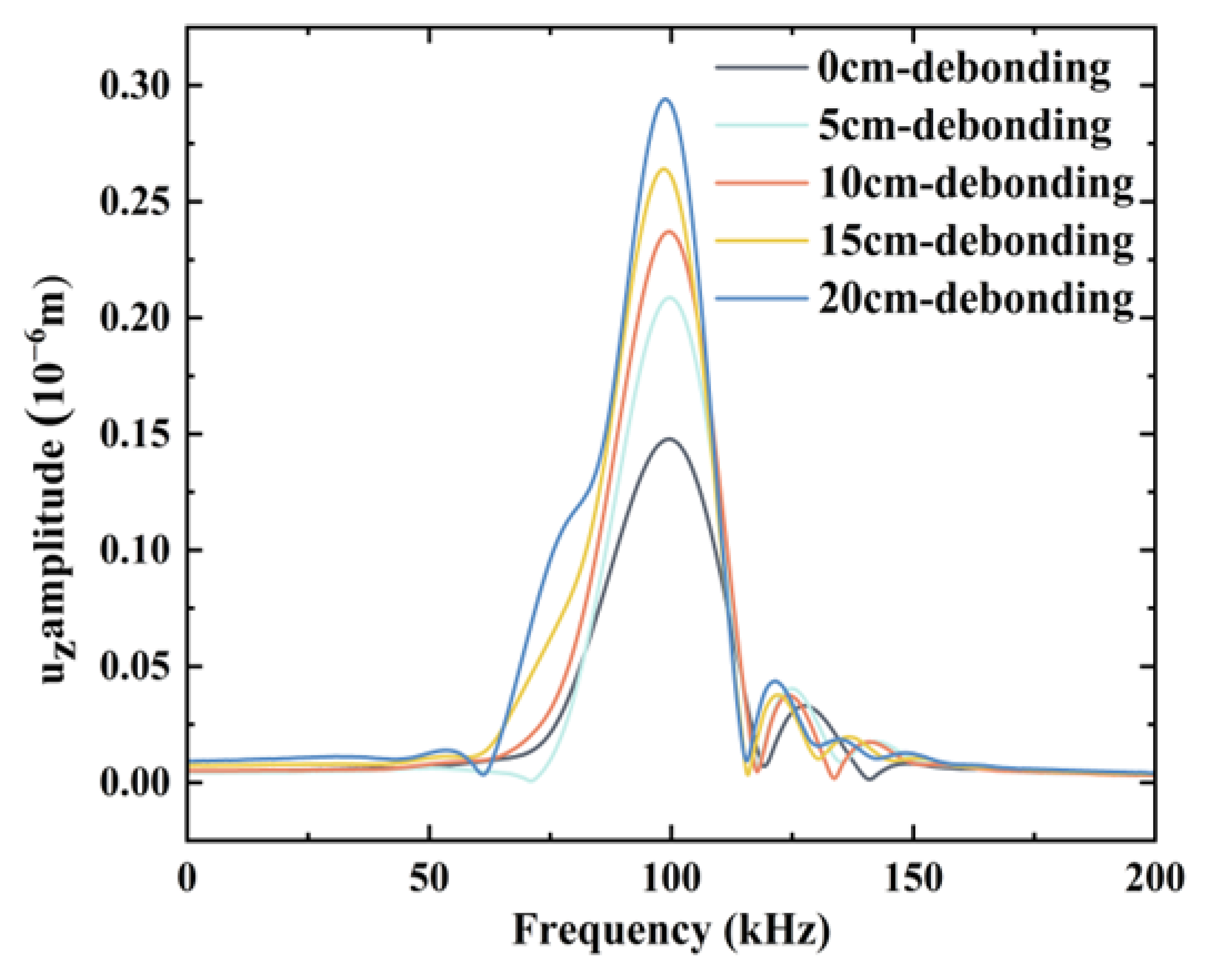
3.2.3. Frequency Domain Analysis (Simulation)
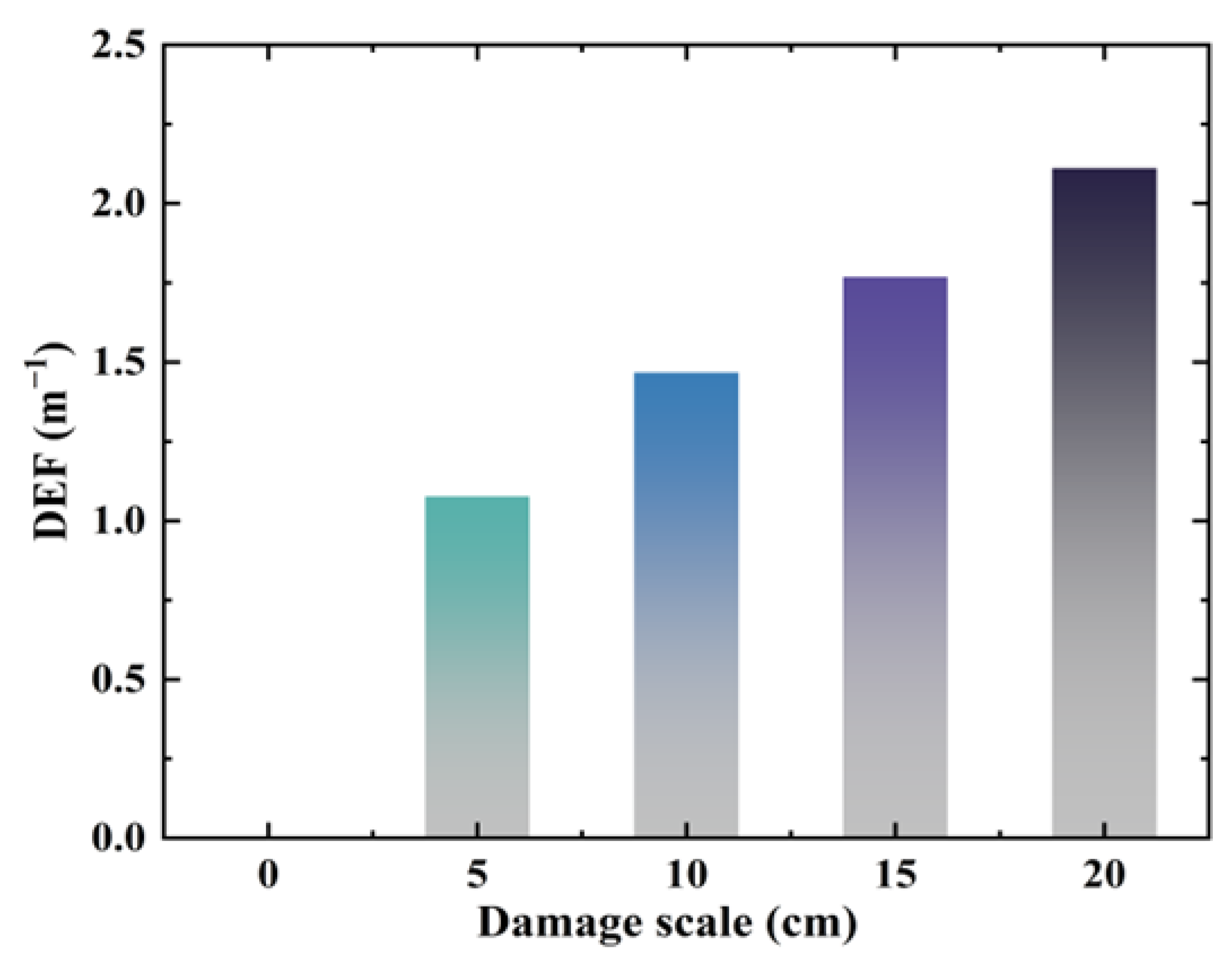
3.2.4. Simulation of the DEF Calculation Results
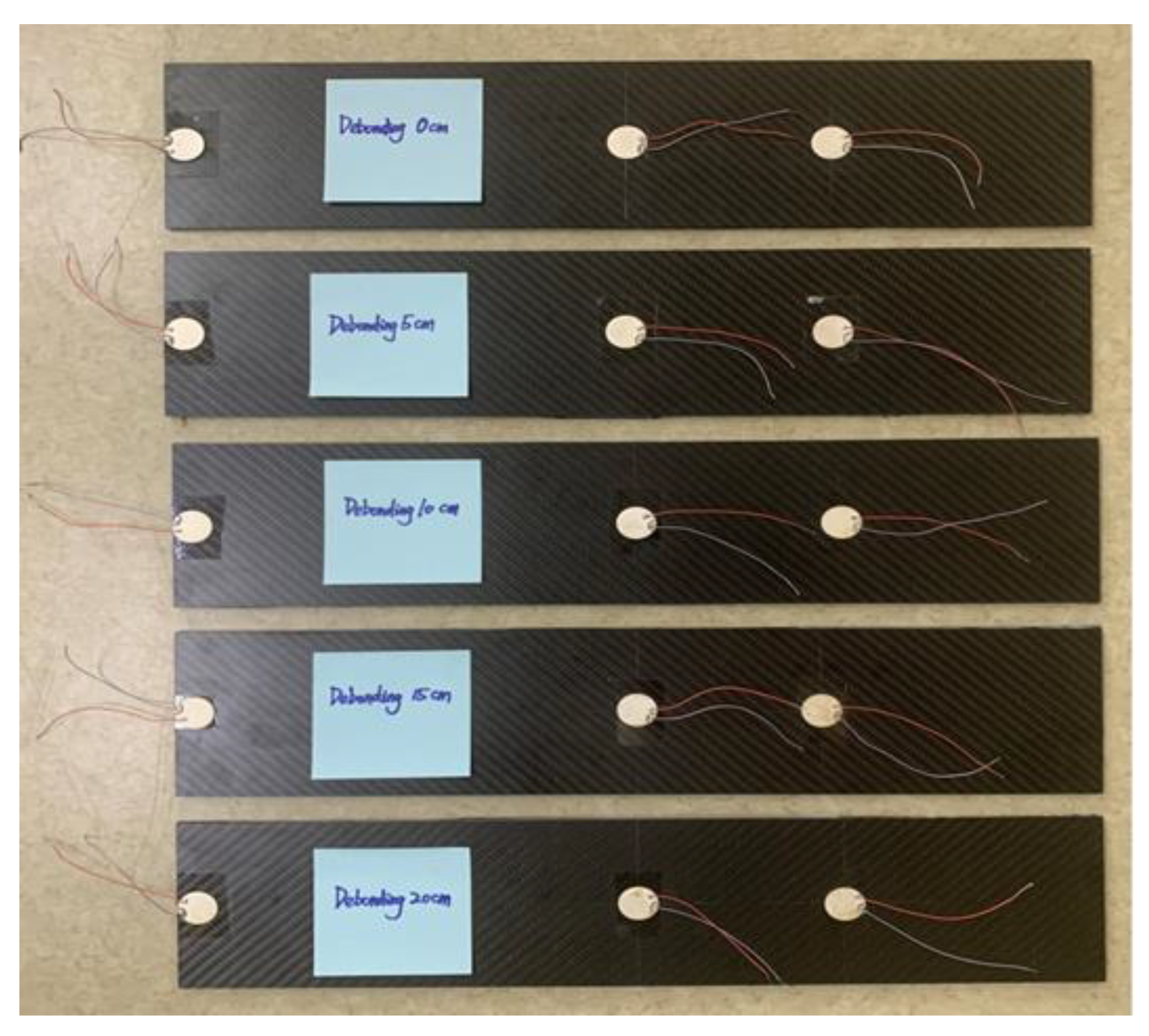
3.3. Experiments
3.3.1. Experimental Results
3.3.2. Time-Domain Analysis (Experiment)
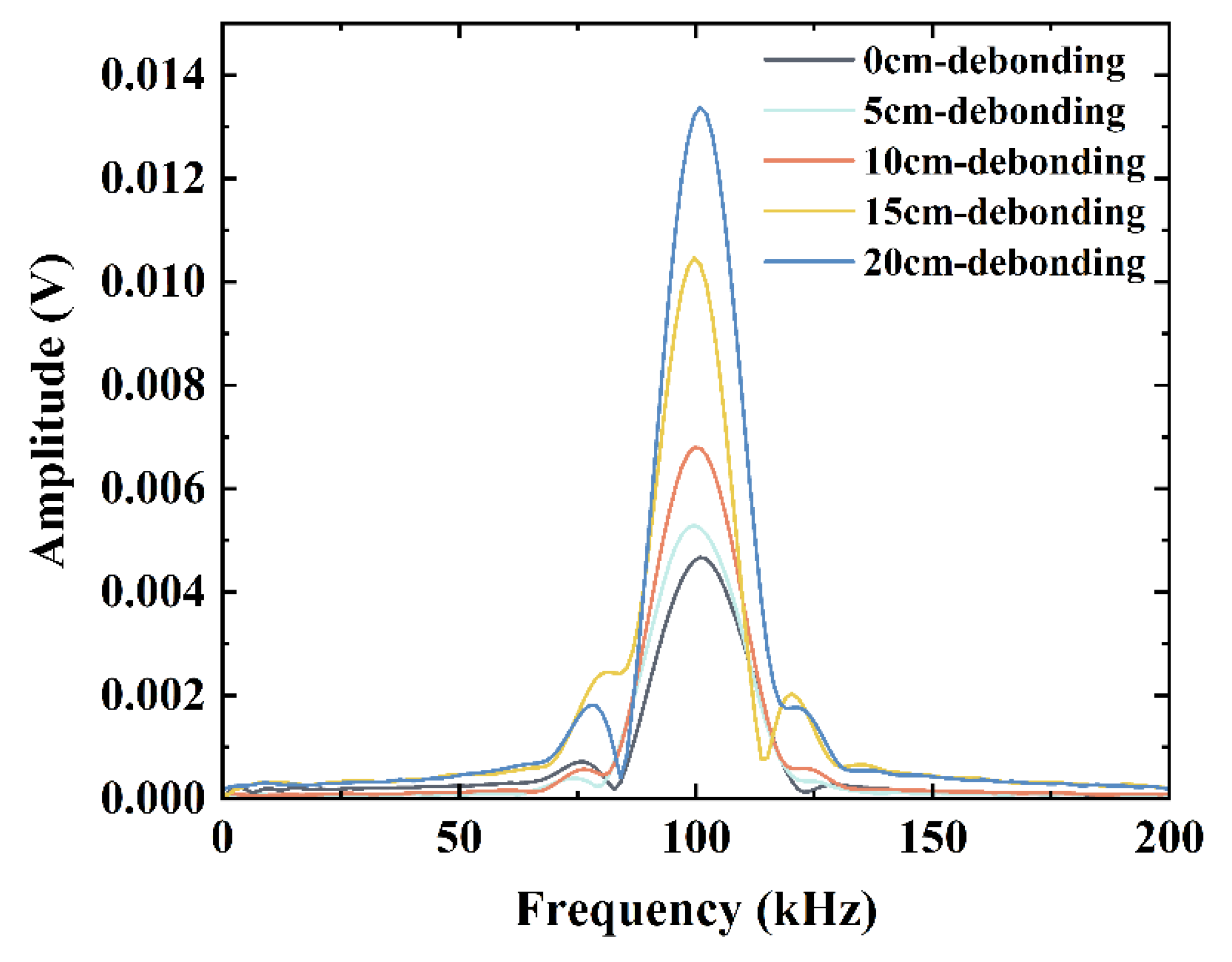
3.3.3. Frequency Domain Analysis (Experiment)
3.3.4. Experimental DEF Calculations
4. Discussion
- During the preparation of the test pieces, the adhesive inevitably spread, resulting in irregular boundaries in the debonding area, which are different from the simulation and theoretical analysis.
- The numerical simulations did not consider the influences of electromechanical coupling and bonding layers, simplifying the model. In the experiment, wave energy leaked into the bonding layer during propagation, which inevitably led to discrepancies between the calculated and simulated results.
5. Conclusions
- Method Effectiveness: The proposed detection method demonstrated strong effectiveness in identifying interfacial debonding defects, particularly by using a simple configuration that requires only a PZT sensor placed on the external surface of the structure. This makes the method highly suitable for integration into existing SRM structures with minimal operational complexity.
- Numerical and Experimental Validation: Numerical simulations showed that debonding defects at the interfaces caused significant wave scattering without energy leakage to the inner structure. The first arrival wave packet, extracted from the time-domain signal, was used for DEF analysis, with DEF values increasing proportionally to the debonding damage scale, confirming the reliability of this approach.
- DEF Application and Limitations: While DEF provides a qualitative assessment of debonding damage, uncertainties in parameters β and γ limit its quantitative application. Parameter β is related to the material’s elastic modulus and density, and γ to the structure’s thickness, shape, and boundary conditions. β can be estimated through tensile tests or material handbooks, while γ requires finite element simulation or theoretical analysis. Further research is needed to enhance the quantitative assessment of interfacial debonding damage in CFRP–viscoelastic bonded structures.
- Future Work: Future research should focus on refining the DEF metric to address uncertainties in material parameters and exploring advanced signal processing techniques to improve detection accuracy and robustness, particularly in complex bonded structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Maggi, F.; Bandera, A.; Galfetti, L.; De Luca, L.T.; Jackson, T.L. Efficient solid rocket propulsion for access to space. Acta Astronaut. 2010, 66, 1563–1573. [Google Scholar] [CrossRef]
- Li, W.; Palardy, G. Damage monitoring methods for fiber-reinforced polymer joints: A review. Compos. Struct. 2022, 299, 116043. [Google Scholar] [CrossRef]
- Chowdhury, N.M.; Chiu, W.K.; Wang, J.; Chang, P. Experimental and finite element studies of bolted, bonded and hybrid step lap joints of thick carbon fibre/epoxy panels used in aircraft structures. Compos. Part B Eng. 2016, 100, 68–77. [Google Scholar] [CrossRef]
- Kumar, S.; Singh, K. Tribological behaviour of fibre-reinforced thermoset polymer composites: A review. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2020, 234, 1439–1449. [Google Scholar] [CrossRef]
- Zhou, Q.-C.; Xu, J.-S.; Chen, X.; Zhou, C.-S. Review of the Adhesively Bonded Interface in a Solid Rocket Motor. J. Adhes. 2016, 92, 402–428. [Google Scholar] [CrossRef]
- Yu, J.-Q.; Zheng, J.; Jia, D.; Zhou, C.-S. Finite element modeling of propellant and inhibitor interface debonding. In Proceedings of the 2015 International Conference of Materials, Environmental and Biological Engineering, Guilin, China, 28–30 March 2015; Atlantis Press: Paris, France, 2015. [Google Scholar] [CrossRef]
- Zhou, Q.-C.; Ju, Y.-T.; Wei, Z.; Han, B.; Zhou, C.-S. Cohesive Zone Modeling of Propellant and Insulation Interface Debonding. J. Adhes. 2013, 90, 230–251. [Google Scholar] [CrossRef]
- Chen, L.; Gui-E, L.; Jinyong, J.; Qiang, G.; Shaoguang, W.; Bin, W. Review on the Test Method of Adhesive Failure in Solid Rocket Motor. In Proceedings of the 2015 Joint International Mechanical, Electronic and Information Technology Conference (JIMET-15), Chongqing, China, 18–20 December 2015. [Google Scholar]
- Qiao, D.; Kong, X.; Meng, S.; Feng, S. Advances in the Analysis of Storage Failure of Solid Rocket Motor. In Proceedings of the 2023 7th International Conference on Mechanical, Aeronautical and Automotive Engineering, ICMAA 2023, Bangkok, Thailand, 24–26 February 2023. [Google Scholar]
- Xianggeng, W.; Tao, B.; Pengbo, W.; Xinjian, M.; Yongchun, L.; Jian, C. Burning Rate Enhancement Analysis of End-Burning Solid Propellant Grains Based on X-ray Real-Time Radiography. Int. J. Aerosp. Eng. 2020, 2020, 7906804. [Google Scholar] [CrossRef]
- Hoffmann, L.F.S.; Bizarria, F.C.P.; Bizarria, J.W.P. Detection of liner surface defects in solid rocket motors using multilayer perceptron neural networks. Polym. Test. 2020, 88, 106559. [Google Scholar] [CrossRef]
- Mini, S.; Ponti, F.; Annovazzi, A.; Ravaglioli, V.; Moro, D. A novel procedure to determine the effects of debonding on case exposure of solid rocket motors. Acta Astronaut. 2022, 190, 30–47. [Google Scholar] [CrossRef]
- Li, L.; Ren, J.; Wang, P.; Gao, H.; Sun, M.; Sha, B.; Lü, Z.; Li, X. A pixel-level weak supervision segmentation method for typical defect images in X-ray inspection of solid rocket motors combustion chamber. Measurement 2023, 211, 112497. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, W.; Yan, S. A novel image enhancement algorithm based on stationary wavelet transform for infrared thermography to the de-bonding defect in solid rocket motors. Mech. Syst. Signal Process. 2015, 62–63, 366–380. [Google Scholar] [CrossRef]
- Wang, F.; Liu, J.; Song, P.; Gong, J.; Peng, W.; Liu, G.; Chen, M.; Wang, Y. Multimodal optical excitation pulsed thermography: Enhanced recognize debonding defects of the solid propellant rocket motor cladding layer. Mech. Syst. Signal Process. 2022, 163, 108164. [Google Scholar] [CrossRef]
- Liu, K.; Zheng, M.; Liu, Y.; Yang, J.; Yao, Y. Deep Autoencoder Thermography for Defect Detection of Carbon Fiber Composites. IEEE Trans. Ind. Inform. 2023, 19, 6429–6438. [Google Scholar] [CrossRef]
- Cholevas, N.; Anyfantis, K.N.; Mußbach, G.; Korompili, G.; Riziotis, C. Crack Identification in Solid Rocket Motors Through the Neyman–Pearson Detection Theory. AIAA J. 2023, 61, 2241–2254. [Google Scholar] [CrossRef]
- Guo, X.; Yang, Y.; Han, X. Classification and Inspection of Debonding Defects in Solid Rocket Motor Shells Using Machine Learning Algorithms. J. Nanoelectron. Optoelectron. 2021, 16, 1082–1089. [Google Scholar] [CrossRef]
- Huber, A.M.A. Classification of solutions for guided waves in fluid-loaded viscoelastic composites with large numbers of layers. J. Acoust. Soc. Am. 2023, 154, 1073–1094. [Google Scholar] [CrossRef]
- Orta, A.H. Inverse Characterization of the Orthotropic and Viscoelastic Material Properties of Lightweight Plates Using Full Field Guided Wave Propagation Data; KU Leuven: Leuven, Belgium, 2023. [Google Scholar]
- Li, X.; Luo, M.; Hei, C.; Song, G. Quantitative evaluation of debond in concrete-filled steel tubular member (CFSTM) using piezoceramic transducers and ultrasonic head wave amplitude. Smart Mater. Struct. 2019, 28, 075033. [Google Scholar] [CrossRef]
- Wang, Y.; Li, X.; Li, J.; Wang, Q.; Xu, B.; Deng, J. Debonding damage detection of the CFRP-concrete interface based on piezoelectric ceramics by the wave-based method. Constr. Build. Mater. 2019, 210, 514–524. [Google Scholar] [CrossRef]
- Yelve, N.P.; Mitra, M.; Mujumdar, P.M. Detection of delamination in composite laminates using Lamb wave based nonlinear method. Compos. Struct. 2017, 159, 257–266. [Google Scholar] [CrossRef]
- Li, J.; Lu, Y.; Lee, Y.F. Debonding detection in CFRP-reinforced steel structures using anti-symmetrical guided waves. Compos. Struct. 2020, 253, 112813. [Google Scholar] [CrossRef]
- Liu, M.; Chen, S.; Wong, Z.Z.; Yao, K.; Cui, F. In situ disbond detection in adhesive bonded multi-layer metallic joint using time-of-flight variation of guided wave. Ultrasonics 2020, 102, 106062. [Google Scholar] [CrossRef]
- Chen, T.; Cao, C.; Li, X.; Kong, Q. Interface debonding detection of grouted connection based on Lamb wave energy leakage. Measurement 2022, 202, 111867. [Google Scholar] [CrossRef]
- Rose, J.L. (Ed.) Ultrasonic Guided Waves in Solid Media; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- Ai, C.; Li, J.; Liu, Y.; Ni, T. Ultrasonic Test Theory and Multilayered Bonding Structure; National Defense Industry Press: Beijing, China, 2014. (In Chinese) [Google Scholar]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Bocchini, P.; Marzani, A.; Viola, E. Graphical User Interface for Guided Acoustic Waves. J. Comput. Civ. Eng. 2011, 25, 202–210. [Google Scholar] [CrossRef]
- Liu, G.; Qu, J. Transient wave propagation in a circular annulus subjected to transient excitation on its outer surface. J. Acoust. Soc. Am. 1998, 104, 1210–1220. [Google Scholar] [CrossRef]
- He, C.; Li, L.; Wu, B. Guided circumferential waves in hollow cylinders. Chin. J. Mech. Eng. 2004, 40, 7–12. (In Chinese) [Google Scholar] [CrossRef]
- He, C.; Li, L.; Wu, B. Research on guided circumferential waves in a thin-walled pipe. J. Exp. Mech. 2002, 17, 419–424. (In Chinese) [Google Scholar]
- Ng, C.T.; Veidt, M. Prediction and Measurement of Lamb Wave from Debondings at Structural Features in Composite Laminates. Key Eng. Mater. 2013, 558, 139–148. [Google Scholar] [CrossRef]
- Su, Z.; Ye, L.; Lu, Y. Guided Lamb waves for identification of damage in composite structures: A review. J. Sound Vib. 2006, 295, 753–780. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Properties | Density (kg/m3) | Young’s Modulus (GPa) | Poisson’s Ratio | Thickness (mm) |
|---|---|---|---|---|
| CFRP | 1900 | 177 | 0.32 | 2 |
| Rubber (viscoelastic) | 1150 | 0.7145 + 0.3487i | 0.4614 − 0.0214i | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Ren, Y.; Shi, Q.; Cui, D.; Liu, J. Detection of Debonding Defects in Carbon Fiber-Reinforced Polymer (CFRP)–Rubber Bonded Structures Based on Active Lamb Wave Energy Analysis. Sensors 2024, 24, 5567. https://doi.org/10.3390/s24175567
Yang Z, Ren Y, Shi Q, Cui D, Liu J. Detection of Debonding Defects in Carbon Fiber-Reinforced Polymer (CFRP)–Rubber Bonded Structures Based on Active Lamb Wave Energy Analysis. Sensors. 2024; 24(17):5567. https://doi.org/10.3390/s24175567
Chicago/Turabian StyleYang, Zhenze, Yongfeng Ren, Qiang Shi, Dapeng Cui, and Jieqing Liu. 2024. "Detection of Debonding Defects in Carbon Fiber-Reinforced Polymer (CFRP)–Rubber Bonded Structures Based on Active Lamb Wave Energy Analysis" Sensors 24, no. 17: 5567. https://doi.org/10.3390/s24175567